
3RSR型并联式天线样机研制与控制实验
2023-03-19 11:25窦玉超郑东豪曾达幸侯雨雷
机械设计与制造 2023年3期
窦玉超,郑东豪,曾达幸,侯雨雷
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.燕山大学机械工程学院,河北 秦皇岛 066004)
1 引言
航天遥感、卫星“三遥”(遥感、遥测、遥控)天线设计多采用俯仰-方位型,其在天线天顶位置存在“盲锥区”。俯仰-方位型天线无法在卫星过顶空域连续跟踪卫星、实现信号不间断连续工作的需求[1]。
并联机构由两个或两个以上的分支连接动、定平台而组成,为空间多分支闭链形式,以其结构紧凑、承载能力强、运动惯性小、不存在累积误差等特点[2]在天线领域有其独特应用[3]。文献[4]提出了3−RSR(R为转动副,S为球面副)并联机构应用于卫星天线支撑的方案。文献[5]以4−SPS(PS)并联机构作为雷达天线自动调平系统的支撑架。文献[6]采用3−RPS并联机构作为天线支撑机构,对天线机构进行了运动学分析,并研制了试验样机。文献[7]研究分析了Stewart并联机构应用于天线支撑的可行性。
3−RSR机构为少自由度并联机构中的经典构型之一[8],具有两个转动、一个移动共3个自由度。文献[9]对3−RSR并联机器人进行了运动学和动力学建模及仿真。文献[10]研究了3−RSR并联机器人的位置正解。文献[11]对3−RSR/SP 并联车载天线机构运动及力学特性进行了分析。结合机电一体化设计,文献[12]针对并联机器人的控制方法进行了研究。文献[13]开展了平面5R并联机器人轨迹规划和运动学仿真及实验。文献[14]对6−PUS/UPU(P为移动副,U为虎克铰)并联机构开放式控制系统进行了研究。文献[15]设计了3自由度Delta型并联机器人控制系统;文献[16]使用Qt/Embedded软件对嵌入式控制界面进行了开发。
基于3−RSR 并联机构设计一种并联式天线样机,可实现方位、俯仰和收藏的运动功能;进行不同受载工况下机构动力学仿真分析以确定所需驱动力矩,搭建一套由PC+控制器+电机组成的控制系统,并开发相应控制软件;开展天线样机的运动控制实验,以验证并联式天线样机的运动功能以及控制系统的有效性。
2 3−RSR型并联式天线样机研制
并联式天线样机由天线面、天线座架、防护罩和电控柜组成,其中,电控柜与地面固定,主要用来放置天线样机的电源、变压器、控制器、驱动器及线路;天线座架由3−RSR并联机构和电机组成,固定在电控柜上;电机驱动3−RSR并联机构带动天线实现方位、俯仰、收藏的运动功能,以实现天线运动需求,使天线能够保持一定的位姿运动;天线面通过螺钉固定在天线座架上,并跟随其运动,主要用于接收发送信息。当天线停用时,将防护罩盖在其上以进行保护。
3−RSR 并联机构由动平台、定平台和三条运动支链组成。定平台是并联机构的固定部件,通过螺栓固定在电控柜上,其功能是放置电机、定位三条运动支链、承担天线面和天线座架的自重与载荷。三条运动支链结构相同,其组成,如图1所示。

图1 3−RSR并联机构运动支链Fig.1 Sports Branch of 3−RSR Parallel Mechanism
由上支撑座、上支链、下支链、下支撑座组成,上支撑座与上支链、上支链与下支链、下支撑座与下支链均通过转动副连接。各运动支链的上、下支撑座分别通过螺钉与动、定平台固连。同时,为降低天线座架的运动惯量,上、下支链的连杆采用碳纤维材料。
并联机构动平台是天线座架的执行部件,天线固定于其上,动平台分别与三条运动支链通过螺钉相连,由三条支链将力/运动共同传递到动平台上,实现天线的方位、俯仰、收藏运动。
考虑电机选型所需,分析并联式天线样机在工作过程中的受载情况,对天线样机运动过程中电机的驱动力矩予以求解。针对不同的工况需求对天线样机进行动力学仿真,选取其中受力情况最恶劣的工况进行分析,利用Adams软件对天线样机三维模型进行运动仿真,得到并联式天线样机的三个驱动力矩变化曲线,如图2所示。
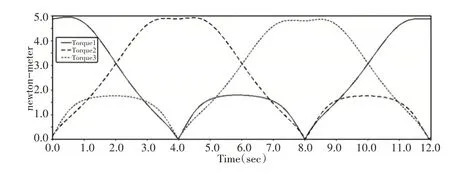
图2 并联式天线样机驱动力矩变化曲线Fig.2 Driving Torque Variation Curve of the Parallel Antenna Prototype
根据并联式天线样机驱动力矩的分析结果对天线样机的传动系统进行设计。并联式天线样机下支撑座部位的传动方式,如图3所示。选用步进电机作为驱动元件,驱动传动轴转动,传动轴带动3−RSR并联机构运动支链的下支链转动。根据Adams仿真所得天线样机下支链驱动所需的最大驱动力矩对步进电机进行选型,步进电机采用东方马达电机,型号为PK543AW−H50S;驱动器型号为PKD507−A;组合型号为CRK543APB−H50。
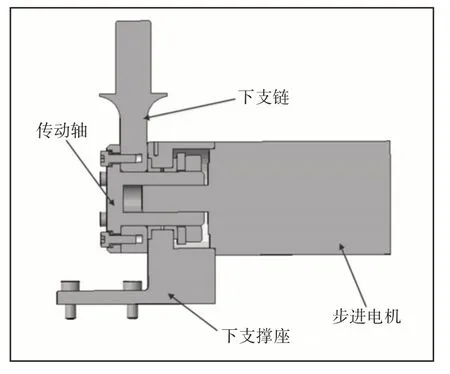
图3 并联式天线样机下支撑座传动组成Fig.3 Transmission Composition of the Lower Support Seat of the Parallel Antenna Prototype
依照并联式天线样机三维模型,遵循工艺要求绘制工程图纸,加工、组装并进行调试以确保样机实现预期各项性能指标。所研制的并联式天线样机,如图4所示。

图4 3−RSR型并联式天线样机Fig.4 3−RSR Parallel Antenna Prototype
3 3−RSR型并联式天线控制系统开发
3.1 天线控制系统硬件搭建
3−RSR型并联式天线控制系统硬件由上位机、下位机、驱动器、步进电机、限位开关等组成,如图5所示。以上位机和下位机为控制核心,实现对天线位姿和速度的准确控制。以PC作为上位机,实现信息输入、计算处理、发送指令和状态显示等功能;以STM32控制器作为下位机,实现控制量输出、传感器数据采集等功能;上位机通过USB接口与下位机编程接口连接,形成系统通信的物理通道。

图5 天线控制系统架构Fig.5 Structure of the Antenna Control System
在PC(上位机)中输入运动参数(天线的方位角、俯仰角以及运行时间),上位机读取输入的运动参数,运用运动学逆解求得电机的运动参数;上位机将电机的运动参数转换为运动指令,并通过串口通信将其发送给下位机;下位机将运动指令处理后分别发送给三个驱动器,驱动器发送脉冲驱动电机转动,控制天线达到指定位姿。当电机转动到极限位置时,触发限位开关,将信号反馈给下位机,下位机停止对相应的驱动器发送信号,此电机停止转动;当三个电机都转动到极限位置时,下位机通过串口通信向上位机发送天线停止信息。
3.2 天线上位机控制软件开发
3−RSR型并联式天线控制系统的人机交互主界面,如图6所示。包括以下功能模块:菜单栏、数据显示模块、参数输入模块、调试模块、按键模块以及通信标志。其中,菜单栏模块包括“文件”、“串口调试”“、帮助”等功能,能够实现软件界面的基本操作、上下位机之间的通信及帮助文档的查看;通讯标志实时显示通信状态及串口号,通过调试模块可对天线样机进行调试,能够独立编写指令发送到下位机,并显示反馈信息。使用控制软件时,可直接在参数输入模块输入期望的方位角、俯仰角及运行时间等参数;在天线的运行过程中,数据显示模块能够显示天线实时位姿、电机实时转角、电机目标转角、电机实时速度;按键模块提供常规操作使用的按键,包括“启动”、“停止”、“运行”、“回零”、“收藏”、“演示”“、数据引导模式一”“、数据引导模式二”等按键,并针对不同功能的按键用颜色进行区分。这一模块能够实现天线样机的启动、运行、停止、归零、收藏、演示、数据引导等功能。

图6 3−RSR型并联式天线样机控制软件Fig.6 Control Software for the 3−RSR Parallel Antenna Prototype
天线控制系统主程序流程,如图7所示。天线控制系统初始化后,将上下位机通信,然后在控制界面内输入运行的目标位姿及运动时间。按下启动键,系统自动读取存储的天线的当前位姿,通过运动学逆解求出电机的当前转角;同时,系统自动读取输入的目标位姿及运动时间,通过运动学逆解计算出电机的目标位置,并显示在主界面上。根据运行时间对目标轨迹进行分段,计算下一分段点的位姿,通过运动学逆解求出电机对应的转角,比较当前转角和下一分段点的转角,计算出电机的转动速度,并将其转换为信号发送给下位机,驱动电机达到指令位置;然后,判断电机是否达到目标位置,若达到目标位置,记录天线的当前位姿作为下一次运行的初始位姿;若未达到目标位置,继续计算下一分段点的电机位置,直至其达到目标位置为止。

图7 天线控制系统主程序流程Fig.7 Main Program Flow of the Antenna Control System
天线控制系统数据引导程序流程,如图8所示。使用数据引导功能时,首先读取路径的数据文件,依次读取数据,并将其分别赋予方位角、俯仰角、运行时间,并在界面中实时显示。然后,系统自动调用运行函数,控制天线按照读取的路径进行运动。
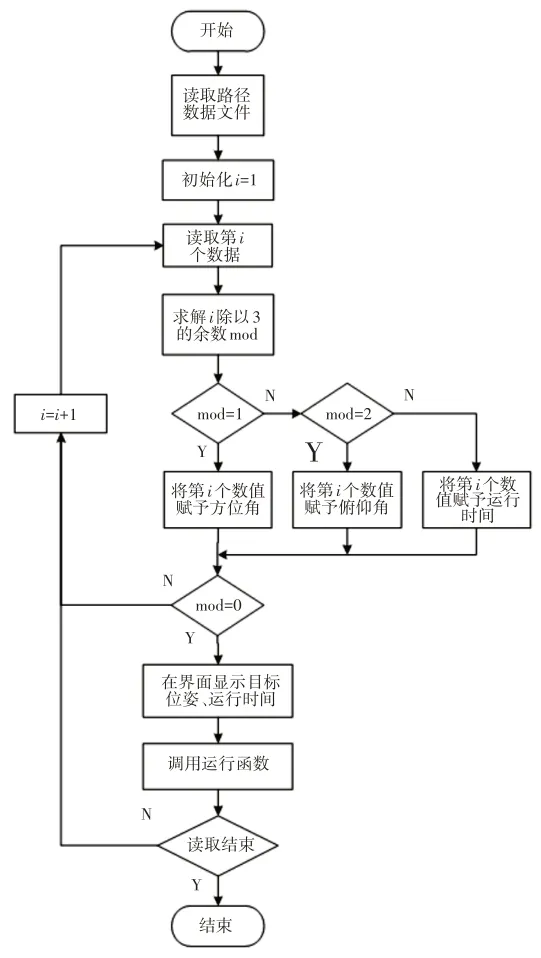
图8 天线控制系统数据引导程序流程Fig.8 Data Guide Program Flow of the Antenna Control System
3.3 天线下位机设计开发
3−RSR型并联式天线样机控制系统以STM32控制器作为下位机,STM32控制器通过脉冲输出、高低电平输出对驱动器发出控制信号,实现电机运动控制。
本系统采用的STM32控制器型号为F103ZET6,其额定电压为直流5V,而驱动器的额定电压为交流110V,因此STM32使用USB 供电,而驱动器和步进电机采用变压器供电。驱动器和STM32单片机通过数据线连接,进行脉冲传输。
天线控制系统下位机的主程序流程,如图9所示。系统初始化完成后,下位机首先等待并接收上位机发送的信号;然后将其解码转化为电机的运行时间和运行速度,通过计算再将其转换成脉冲的发送频率;最终,将脉冲发送给驱动器驱动电机运动。运行结束后,将结束信息反馈给上位机,继续等待下一次信号的发送。
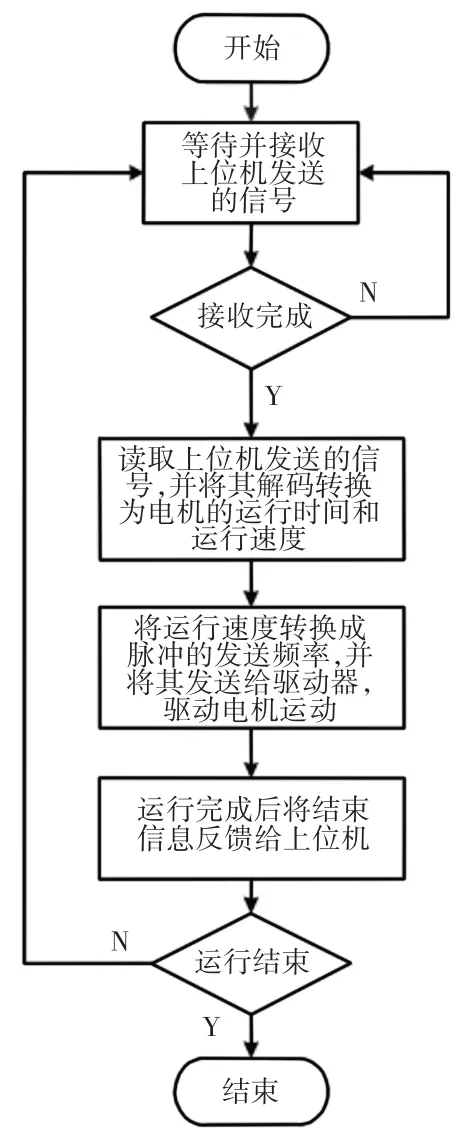
图9 天线控制系统下位机主程序流程Fig.9 Main Program Flow of the Lower Computer in the Antenna Control System
4 3−RSR型并联天线样机运动控制实验
4.1 天线功能实验
并联式天线样机装配、调试完成后,对天线控制系统的功能进行验证,以保证样机和控制系统能够正常运行。首先接通样机的电源,将数据线插在计算机的USB接口上,为控制系统供电;然后点击控制程序的快捷方式打开控制界面;点击控制界面菜单栏内的“通信”−“connect”,进入通信界面,进行串口通信,保证数据传输。按下控制界面的“启动”按键,天线由收藏位姿上升至初始位姿,如图10(a)所示。
在“输入参数”一栏中输入期望位姿以及运行时间,点击“运行”键,控制天线运行到期望位姿,如图10(b)所示。在天线运行过程中,控制界面实时显现天线位姿和电机的转角、转速;按下“回零”键,天线从当前位姿直接返回回零位姿,如图10(c)所示。最后,按下“收藏”键,天线返至收藏位姿,如图10(d)所示。
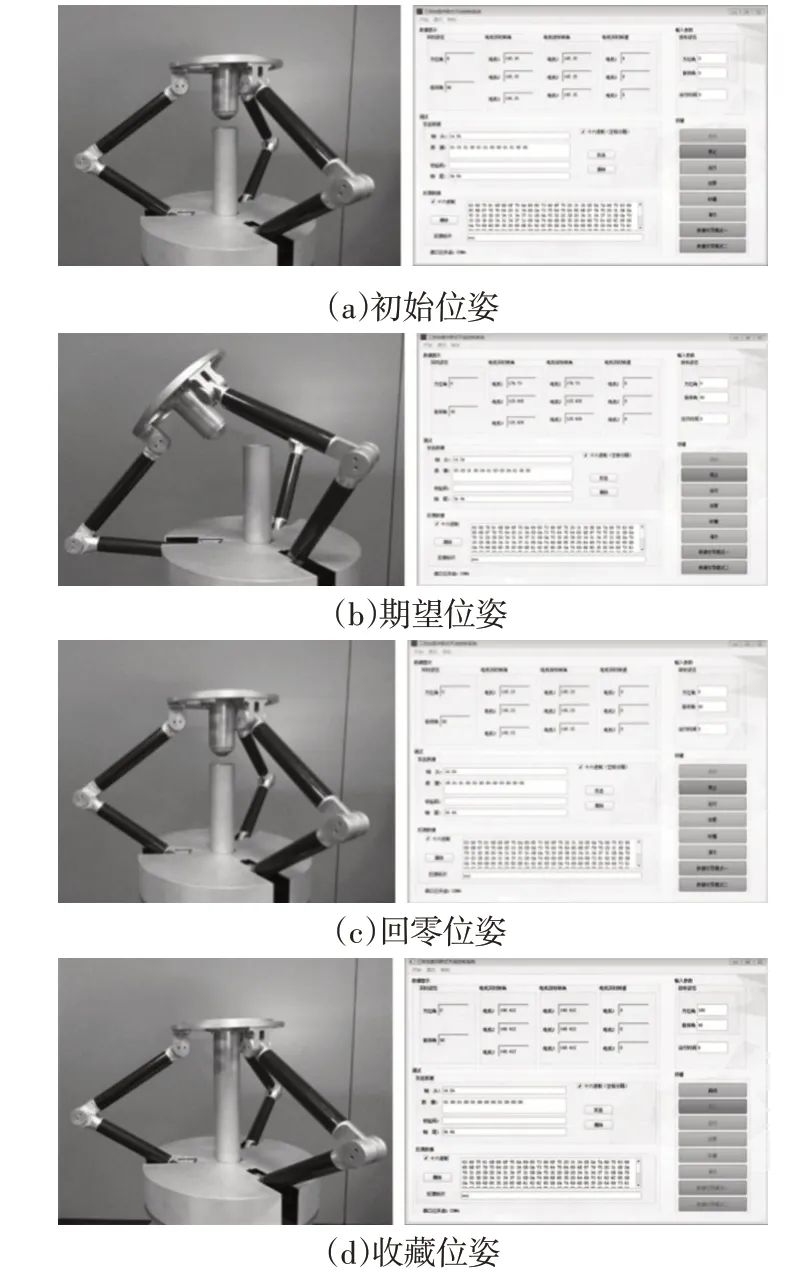
图10 3−RSR型并联式天线样机运动实验Fig.10 Motion Experiment of the 3−RSR Parallel Antenna Prototype
输入多组参数反复进行运动测试,此并联式天线样机在半球的工作空间内运动平稳,无奇异位形,能够实现方位(0~360)°、俯仰(0~90)°运动及收藏功能。
4.2 天线指向实验
为验证并联式天线样机的指向性能,设计并联式天线样机的指向实验。首先,在画板上给定目标轨迹图像,然后利用激光笔对图像进行标校,确定画板在天线定坐标系中的位置;最后控制并联式天线样机运动,使安装在并联式天线动平台上的激光笔所发光束沿给定轨迹运动。指向实验具体步骤:
①给定目标轨迹的图像,如图11所示。利用点集或参数方程表达轨迹中各点相对于画板坐标系的位置,目标轨迹各点相对于画板坐标系的坐标为A(0,0,123.6)、B(0,72.7,−100)、C(0,−117.5,38.2)、D(0,117.5,38.2)、E(0,−72.2,−100);给定画板坐标系相对于3−RSR并联机构定坐标系的位置。
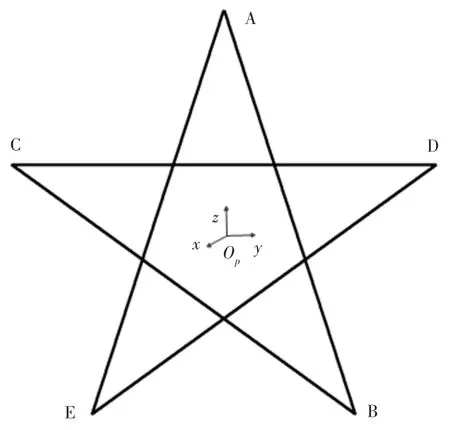
图11 目标轨迹Fig.11 Target Tajectory
②依据实验原理中相关公式编写计算程序,以计算目标点对应的并联式天线位姿。
③将计算得到的天线位姿依次输入到控制程序的数据引导文件中。
④待天线启动完成后,在控制界面中点击“数据引导一”键,天线首先由初始位姿俯仰运动到A位姿,即使激光点到达A点;然后,天线动平台上的激光点将沿着目标轨迹依次按照A−B−C−D−E−A的顺序运动;最后,天线自动俯仰回到初始位姿,如图12所示。

图12 3−RSR型并联式天线样机指向实验过程Fig.12 Process of Pointing Experiment for the 3−RSR Parallel Antenna Prototype
⑤沿轨迹完成运动后,按下“收藏”键,天线由初始位姿运动到收藏位姿。
通过3−RSR 型并联式天线样机运动性能和指向能力实验,验证了先期理论分析与结构设计的正确性以及控制系统的有效性,为进一步产品化实现奠定了基础。
5 结论
基于3−RSR 并联机构研制出一种并联式天线样机,构建其控制系统并开发控制软件,开展运动与指向实验,结果表明3−RSR并联机构应用于天线座架是可行的,天线样机能够实现既定方位、俯仰运动及收藏功能,并满足相应指标要求,对少自由度并联机构应用于天线领域具有理论指导意义,并为进一步的并联式天线产品化奠定了技术基础。
猜你喜欢
科技与创新(2018年1期)2018-12-23
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
湖北工业大学学报(2016年5期)2016-02-27
实用手外科杂志(2015年2期)2015-08-28
空间控制技术与应用(2015年2期)2015-06-05
饲料博览(2015年4期)2015-04-05
北京航空航天大学学报(2014年1期)2014-12-19
