
开绕组BLDCM功率器件故障容错控制技术研究
2023-03-18 10:35闫红涛
电机与控制应用 2023年3期
黄 其, 罗 玲, 闫红涛,3, 高 宇,3
(1.西北工业大学 自动化学院,陕西 西安 710072;2.贵州大学 机械工程学院,贵州 贵阳 550025;3.贵州航天林泉电机有限公司,贵州 贵阳 550081)
0 引 言
永磁无刷直流电机(BLDCM)系统由电机本体、控制器、位置传感器组成,具有功率密度高、调速性能好、无碳刷磨损寿命长、体积小、质量轻的特点,广泛应用在汽车、家电、机器人和通信设备等领域[1]。传统永磁BLDCM的定子绕组通常采用星形连结构,由三相全桥逆变电路驱动,三相绕组存在公共点,当某相绕组或其逆变电路出现故障时,会对其他相绕组的运行产生影响,导致电机不能平稳运行,甚至烧坏绕组,不能满足电机高可靠性要求[2-5]。在要求高平稳、高可靠性的电驱动领域中,通常采用余度电机或容错电机,但这两种结构电机的系统复杂,要求绕组的相数多,电枢常采用隔槽安放的集中绕组结构,绕组利用率不高、工艺复杂,导致电机体积和质量增大,成本升高[6-7]。
开绕组结构是将电机绕组间的中性点断开,定转子结构不改变,每相绕组连接各自的驱动电路,其特点为可对各相绕组的电压、电流单独控制,相绕组间电气隔离。目前开绕组结构已经应用到永磁电机、异步电机、发电机、变压器等电器[8-10]。与传统永磁无刷电机类似,开绕组BLDCM也有两种控制方式:方波控制和正弦波控。国内外对正弦波控制开绕组BLDCM做了大量研究,包括提高效率、提高电压利用率、降低共模电压等。但正弦波控制方式需要高精度位置传感器(旋转变压器或光电编码器)来获取转子位置角度,同时需要高性能芯片进行坐标变换运算和空间矢量脉宽调制(SVPWM)运算,导致系统成本较高。BLDCM采用方波控制方式,只需三个霍尔位置传感器和换相逻辑电路,成本低,控制算法简单[11-12]。
与容错电机系统相比,开绕组BLDCM可采用分数槽绕组减少转矩脉动,采用双层绕组提高绕组利用率,并减少电流谐波。虽然相邻绕组之间还存在磁路耦合,但已经实现了绕组之间的电气隔离,具备较好的容错性能[13]。开绕组永磁电机的定转子磁路没有改变,可延用原有的电机生产工艺,工程上方便实现。
本文介绍开绕组BLDCM原理及特性,建立有限元仿真模型。对开绕组BLDCM的功率器件故障进行分析,并利用保险丝作为功率器件故障的保护器件。对比分析补偿法和重构法两种容错方法的效果,通过搭建样机试验平台,验证补偿容错方法的合理性。
1 开绕组BLDCM原理及特性
容错电机与常规电机的定子绕组结构如图1所示。
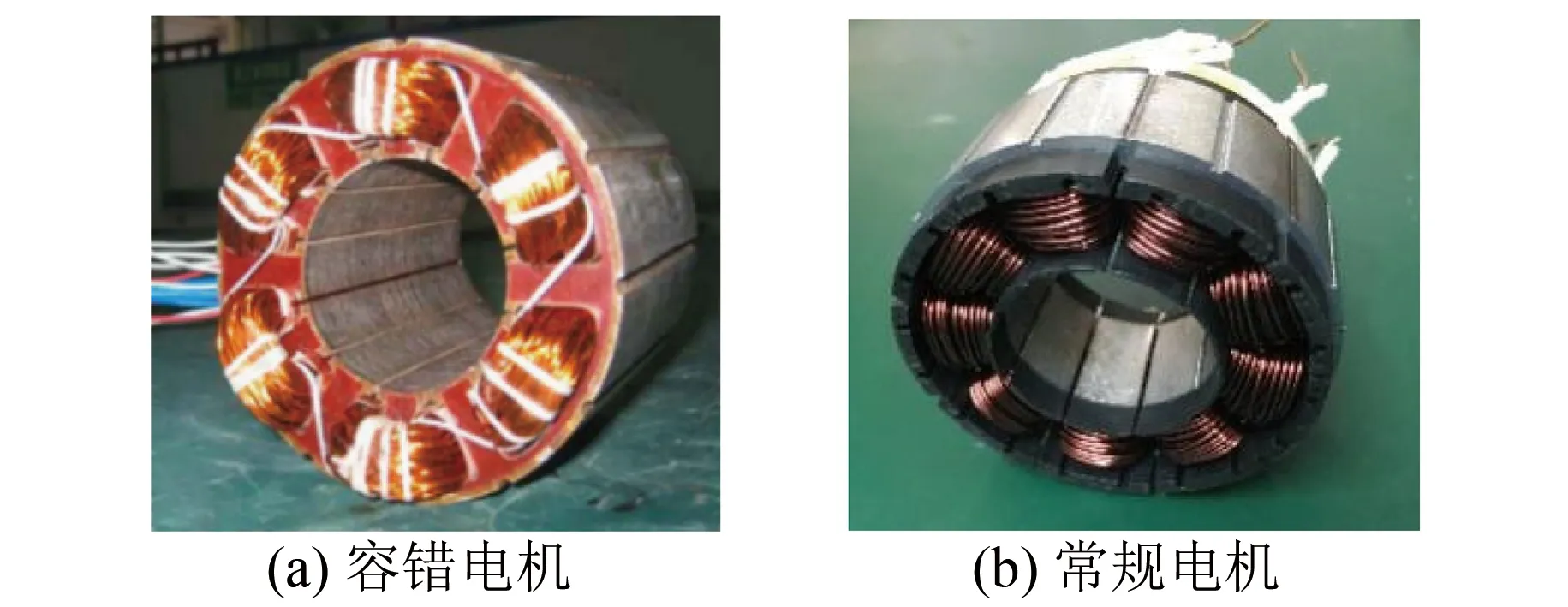
图1 定子绕组结构
1.1 电路拓扑结构
开绕组BLDCM的每相绕组连接各自的H桥逆变电路,考虑到成本因素和环境适应性,三相绕组的3个H桥逆变电路由同一个电源供电,如图2所示,逆变电路共需要12个功率器件,V1i(i=1~4)为A相绕组连接的4个功率器件,U0为电源母线电压,I0为电源母线电流。虽然开绕组电机控制器的开关器件比传统三相桥式逆变电路要多一倍,但每个器件的耐压降低一半,适合低电压宽调速应用场合[14]。

图2 开绕组三相BLDCM驱动电路
1.2 两相导通六状态控制模式
文献[12]提出了开绕组三相无刷电机的导通模式有8种,通过仿真和试验得出电机采用两相导通六状态(六步换相)控制模式时换相转矩脉动最小,运行最平稳。六步换相控制模式如图3所示,以一对极电机为例,将一个360°(电角度)周期分成6个均等的状态,每个状态转子转动60°(电角度)。每个状态有两相绕组通电,其中一相正向导通,另一相反向导通,电枢磁动势由两相绕组导通时合成产生,在一个状态内电枢磁动势方向不变,在360°(电角度)周期电枢磁动势变换六次。由于电枢磁动势的跳变,使转子转矩产生波动,换相转矩脉动是BLDCM的固有缺陷。
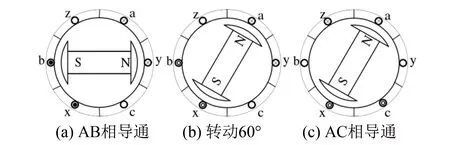
图3 六步换相控制模式

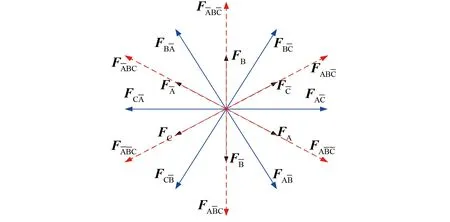
图4 磁动势矢量图

1.3 开绕组BLDCM的建模仿真
开绕组BLDCM的各相绕组相互独立,相绕组电压平衡方程为

(1)
式中:ix、ex、Rx、Lx分别为绕组相电流、反电动势、电阻、电感,x=a、b、c;U0为母线电压;ΔU为开关管压降。
开绕组三相BLDCM的反电动势与常规BLDCM的相同,反电动势波形为120°(电角度)平顶宽度的梯形波,梯形波幅值计算式为
E=CeΦδn
(2)
式中:Φδ为气隙磁通;Ce为反电动势常数;n为电机转速。
电机稳态运行时,dix/dt=0,绕组的相电流为

(3)
电机的电磁功率Pem和转矩Tem为
Pem=∑exix
(4)

(5)
式中:ω为电动机的角速度。
电机建模常用的方法有3种:解释法、数字建模和有限元建模,其中解释法根据电机的电磁方程搭建模型,模型的精度对电磁参数依赖较高;数字建模通常采用MATLAB Simulink工具软件,由各个电气模块连接而成,模块是假定工作在理想状态,难以仿真出实际复杂工况,但是能仿真出参数对模型的影响趋势;有限元建模能够综合考虑电、磁、热等因素,但模型复杂,需配置许多经验参数。本文采用MATLAB Simulink工具软件对开绕组BLDCM进行建模,由直流电源、逆变电路、负载、换相模块、电机本体、示波器等组成,如图5所示,具体建模流程参考文献[15],电机参数如表1所示。
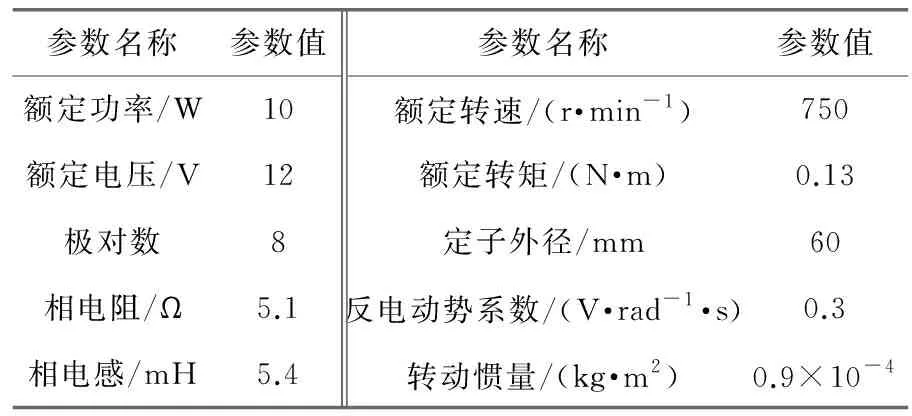
表1 开绕组BLDCM参数

图5 开绕组BLDCM的MATLAB模型
仿真开绕组BLDCM在空载和额定负载下的相电流ia、ib、ic、转矩Te和转速n波形如图6所示,电机空载起动,空载转速约为900 r/min,在0.15 ms时给电机施加额定负载转矩0.13 N·m,负载转速约为740 r/min,相电流有效值约为0.45 A,最大转矩波动约为25%,起动电流为2倍左右额定负载电流。

图6 电机正常运行
2 功率器件故障分析
开绕组BLDCM系统的故障主要分为三大类:电机本体故障、控制器故障和传感器故障。具体内容包括绕组开路、相绕组短路、匝间短路、位置传感器失效、永磁体失磁、轴承破损、转子扫膛、功率器件短路、功率器件开路、电源失效、控制芯片故障、驱动电路故障、电压/电流传感器故障等。其中,功率器件工作在高频开关频率下,承受较大的du/dt和di/dt冲击,发生故障的概率最大。
2.1 故障防御方法
工业应用领域的电机不允许突然停机和长时间停机,即便发生故障,也要保证不降低或降低部分电机性能的情况下继续运行,将故障所带来的经济损失降至最低。故障防御方法主要有三类:硬件保护、定时巡检和在线诊断。
(1) 硬件保护。大部分电机都有硬件保护装置,通过保险丝、空开断路器、硬件过电压/电流保护电路来实现,比如过流保护、过压保护、欠压保护、过热保护、接地保护、振动超限保护、过速保护等,当运行参数和状态参数达到或超过控制器设定值后,电机系统就会报警,进行降低功率运行或停机处理,防止超限运行对电机带来破坏影响。该方法响应迅速,设备投入较少,应用广泛。
(2) 定时巡检。在一些关键应用领域,不允许电机出现停机和降额运行状态,通常采用定期巡检的方法来预防故障的发生。工作人员使用专用的检测设备(绝缘测试仪、光谱分析仪、热成像仪等)定期对电机系统进行检测,提前对可能出故障的电机进行更换和维护。该方法在生活生产保障领域应用较多,需要投入人力和设备。
(3) 在线诊断。由于电机在闭环控制过程中,控制器需要利用传感器检测电压、电流和速度等信息,与目标设定值进行比较运算,而这些检测信号值可以用作在线诊断的输入数据。故障在线诊断方法有三类:基于解析模型、基于信号处理、基经验于知识。大部分情况下故障在线诊断可利用现有的检测数据,无需增加硬件成本,并且只是在程序上增加分析判断功能,可以在各种电子产品上得到应用,但会增加控制芯片的运算量,特别在保护功能多的场合其控制逻辑复杂,存在处理延迟的风险。
随着各类检测传感器和保护算法的大量应用,电机运行过程中出现的过温、过流、开路缺相等状况控制器均能及时检测,并进行停机或降功率处理,因此能大大降低电机本体故障和传感器故障的概率。但是在过压、浪涌电流、静电、不良焊接等状态下出现功率器件故障,控制器难以及时检测到,可能导致电机系统波动、绝缘损坏、绕组过热烧毁等状况,因此需要分析功率器件故障特性,以便控制器及时作出处理。
2.2 短路故障分析
开绕组BLDCM系统的三相绕组由3个独立H桥逆变电路驱动,在分析故障现象时,以A相绕组的逆变电路为例,4个功率器件V11~V14均有可能发生开路故障,可能是一个或多个功率器件发生开路故障。功率器件短路是逆变电路的一种重大故障,只要其中一个功率器件发生短路,会引起连锁反应,当与之处于同一桥臂上串联的功率器件开通时,电源正、负极短接,导致串联的功率器件开通电流过大而烧毁。当H桥逆变电路的一个功率器件短路时,必须禁止与之处于同一桥臂上串联的功率器件开通,此时该H桥逆变电路连接的绕组只能单方向通道,如图7(a)所示。
当H桥逆变电路发生2个功率器件短路时,如果两个短路的功率器件同时处于上、下桥臂,或同时处于桥臂的一边,如图7(b)~图7(c),一旦接通电源就会发生电源短路。当对角的功率器件发生短路故障时,如图7(d)所示,该相绕组处于单方向一直通电状态,不会关断。因此,当H桥逆变电路出现2个以上的功率器件短路时,必须禁止桥臂其他功率器件开通,此时该H桥逆变电路处于断开电源状态。

图7 功率器件短路故障类型
为了防止功率器件短路故障引起电源短路带来的各种危害,通常在H桥逆变电路的电源正极上串联保险丝或者保护继电器,用以及时切断故障模块。也有采用在线判断母线电流是否超限来切断故障模块的方法,但这种方法时效性不及保险丝或继电器,一方面,若控制芯片被干扰,或同时出其他故障就不能有效采取处理措施;另一方面,处理措施出现延时也不能将危害降低到最小。
2.3 开路故障分析
H桥逆变电路若出现3个或4个功率器件开路故障就时,该相绕组就无法通电,出现一个或2个功率器件开路故障还有可能给该绕组通电。当H桥逆变电路出现一个功率器件开路故障时,该相绕组能实现单方向通电,如图8(a)所示。当H桥逆变电路发生2个功率器件开路时,如果2个开路的功率器件同时处于上、下桥臂,或同时处于桥臂的一边,如图8(b)~图8(c)所示,绕组就无法通电;如果处于对角的功率器件发生开路故障时,如图8(d)所示,该相绕组只能单方向通电。

图8 功率器件开路故障
3 容错控制
根据上述分析,开绕组BLDCM系统的大部分功率器件故障最后均采取绕组开路处理或单方向运行处理。当切除掉某一相绕组或某相绕组只能单方向运行时时,电机主磁场就由剩下的相电流产生的磁场来合成产生,控制剩下磁场矢量,使其保持一定的旋转顺序,那么电机就可以继续运行,此时电机输出的转矩波动增大,带来振动噪声。开绕组BLDCM系统的电机容错控制方法有2种:补偿算法和重构算法[16]。
3.1 补偿运行
补偿控制是电机出现一相绕组出现故障时,将剩余相绕组的电流增大,使电机输出的有效转矩保持不变,由式(3)可知,电机转速会下降,输出功率减少,在360°(电角度)周期内电枢磁动势幅值发生变化,导致转矩波动增大。
当故障相绕组只能单方向通电时,该相绕组只能产生单方向的电枢磁动势,另一个方向的电枢磁动势为0。以A相H桥逆变器一个功率器件开路故障为例,三相绕组产生的电枢磁动势如图9(a)所示,三相绕组导通时合成电枢磁动势如图10(a)所示,其中4个为合成矢量,2个为单独矢量。由图10看出,6个电枢磁动势的空间排布偏离了正六边形形状,导致电机有效输出功率减少,转矩脉动增加。

图9 故障时电枢磁动势

图10 补偿运行时电枢磁动势
开绕组三相无刷电机采用两相导通六状态(六步换相)控制模式时,一个导通周期内电机输入电能N0为

(6)
式中:PA、PB、PC分别为定子三相绕组平均功率。
电机属于惯性系统,速度不会发生突变,在一个导通周期三相绕组的反电动势幅值不变,因此一个导通周期内电机输入电能N0为
N0=[EAIA+(-EA)·(-IA)+EBIB+(-EB)·
(-IB)+ECIC+(-EC)·(-IC)]T0=
(2EAIA+2EBIB+2ECIC)T0=6EAIAT0
(7)
式中:T0为一个导通状态的持续时间。
当开绕组BLDCM在C相绕组单方向通电时,此时一个导通周期内电机输入电能N1为
N1=(2EAIA+2EBIB+ECIC)T0=5EAIAT0
(8)
此时若要保持与正常状态下电机输入电能平衡,则需要使正常相绕组电流增大到1.2倍。
当开绕组BLDCM在C相绕组单方向通电时,此时一个导通周期内电机输入电能N2为
N2=(2EAIA+2EBIBC)T0=4EAIAT0
(9)
此时若要保持与正常状态下电机输入电能平衡,则需要使正常相绕组电流增大到1.5倍。
仿真开绕组BLDCM在C相绕组单方向通电时的相电流ia、ib、ic、转矩Te和转速n波形如图11所示,电机空载起动,空载转速约为860 r/min,在0.15 ms时给电机施加额定负载转矩0.13 N·m,负载转速约为720 r/min,相电流有效值约为0.55 A,为正常运行电流的1.2倍左右,最大转矩波动约为45%。
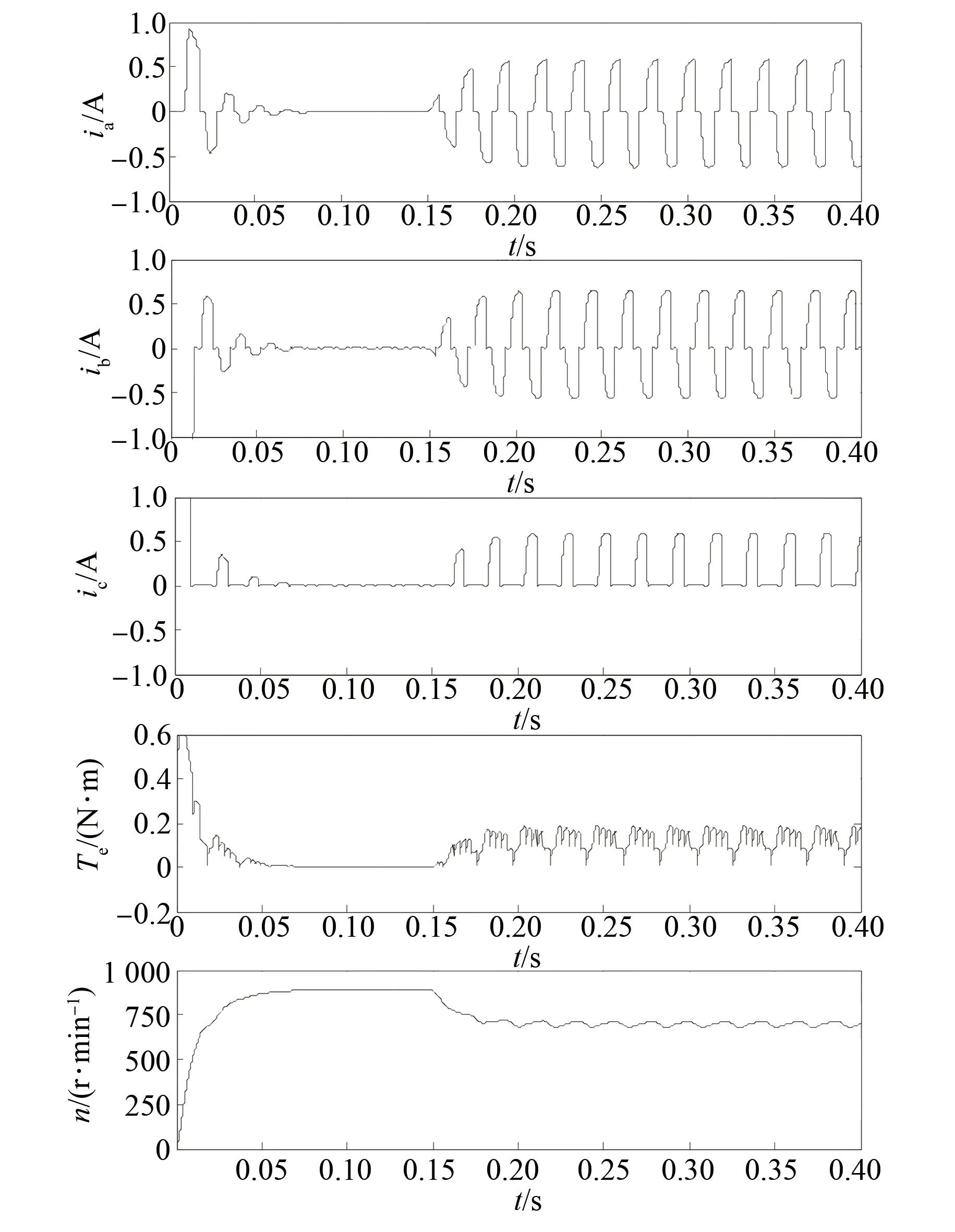
图11 单向导通时补偿运行
当故障相绕组出现开路故障时,该相绕组不能产生电压空间矢量,如图9(b)所示,剩余两相绕组导通时合成电压空间矢量如图10(b)所示,其中2个为合成矢量,4个为单独矢量。由图10、图12看出,6个电压空间矢量的空间排布呈现出菱形形状,电机有效输出功率减少,转矩脉动增加。仿真开绕组BLDCM在C相绕组开路时的相电流ia、ib、ic、转矩Te和转速n波形如图12所示,电机空载起动,空载转速约为820 r/min,在0.15 ms时给电机施加额定负载转矩0.13 N·m,负载转速约为700 r/min,相电流有效值约为0.68 A,约为正常运行电流的1.5倍,最大转矩波动约为55%。

图12 缺相时补偿运行
3.2 重构运行
重构运行是将电机故障绕组与逆变电路切断,调整剩余相绕组的通电模式,使电机的气隙磁场保持圆形旋转状态,6个状态的电枢磁动势幅值不变,从而使电机转矩波动不会增加,但是整个电机的输出功率会下降。以A相H桥逆变器一个功率器件开路故障为例,剩余两相绕组在360°(电角度)周期内要产生6个均匀的电压空间矢量,如图13所示,需要对电压空间矢量的幅值进行控制,可以通过专用芯片来提供PWM调制波,或用数字芯片来输出PWM调制波,但会增加系统成本,且算法复杂,该方法在实践中较少应用。

图13 重构运行
4 样机试验
4.1 样机系统设计
开绕组三相BLDCM本体容易制得,将常规BLDCM绕组间的中性点剪开即可。开绕组三相BLDCM的定转子磁路结构没有改变,可延用原有的电机生产工艺。
开绕组三相BLDCM控制器的主要功能是根据霍尔位置信号判断换相、计算转速,采用速度和电流双闭环控制,具有过压/欠压保护、相电流检测及保护,其组成部件包括:微控制器、电源电路、传感器检测电路、信号调理电路、接口电路、驱动电路、桥式功率变换电路、通信电路等。从结构上可分为三部分:主控板、驱动板、功率板,如图14所示。
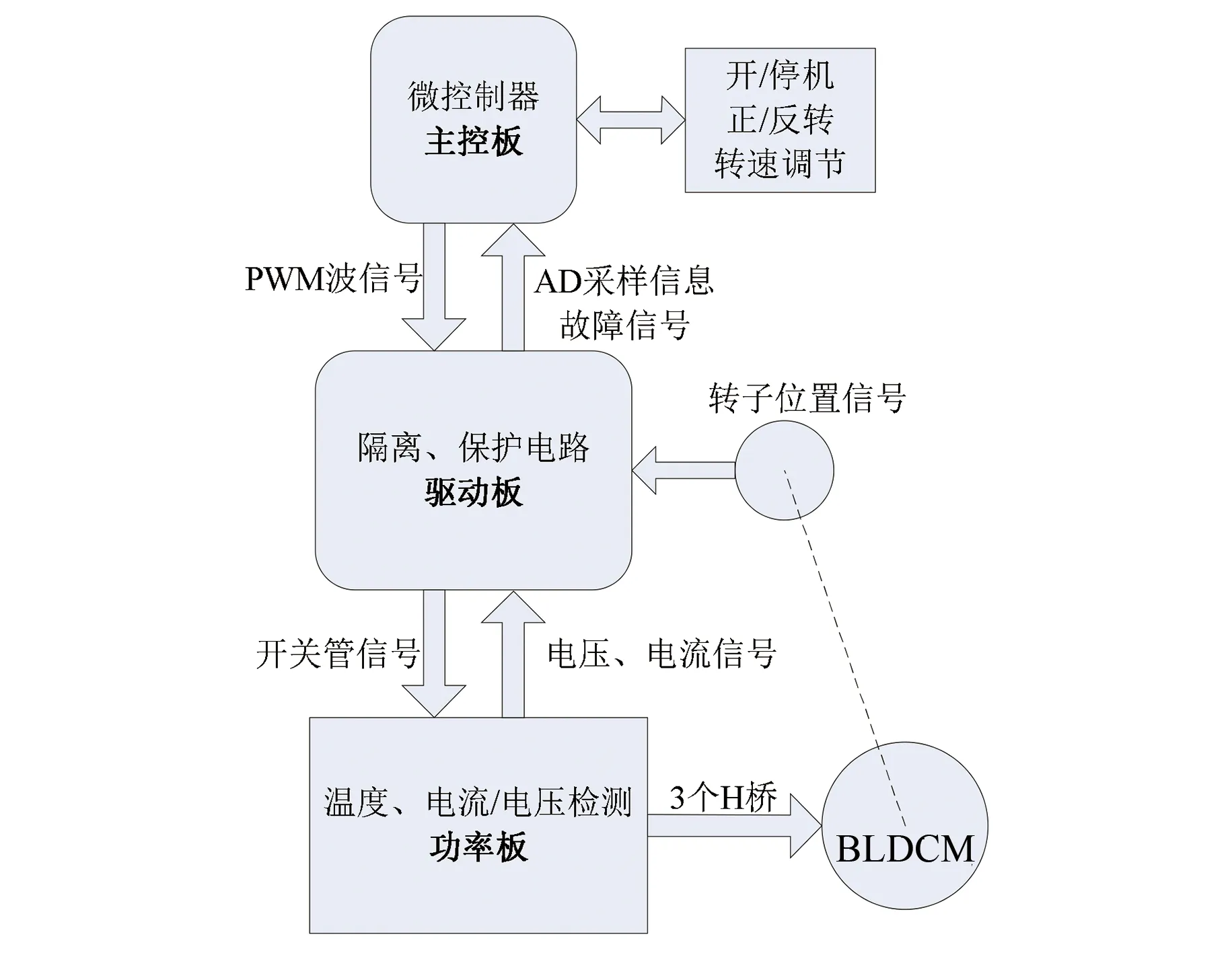
图14 控制器结构图
主控板主要进行数据处理:根据电机转子位置信号计算出各个H桥臂的开通信号,同时处理电流、电压、温度信息,判断电机所处状态,根据故障信号进行容错运行或停机。驱动板主要是对主控板发出的控制信号进行隔离、放大,同时将电机运行的实时状况(母线电压、相电流、温度、转子位置)信号进行隔离、调理,再传输到主控板。功率板是指连接到开式绕组三相无刷电机上的3个H桥及其保护电路。
开绕组BLDCM系统的测试平台如图15所示,直流电源给电机控制器供电,控制器的3个H桥逆变电路分别连接开绕组BLDCM的三相绕组,测功机给电机施加负载转矩,并测试电机转速,示波器通过电流传感器检测电机的相电流波形。由于测功机的采样频率较低,电机转速信号通过DSP开发软件CCS的在线仿真功能获取,最高刷新频率等于驱动器的开关频率,20 kHz。

图15 实验平台
4.2 补偿运行试验
由于电机在故障运行时破坏力较大,容易引发其他损伤,且瞬态过程难以检测,因此试验设计选取低负载状态(0.05 N·m,860 r/min),此时速度波动较小,波动范围在10 r以内,相电流有效值约为0.2 A,如图16(a)~图16(b)所示,此时电流波形与负载仿真波形差距较大,但三相电流波形相互对称。当开绕组BLDCM出现一相绕组单方向通电故障时,为了保证输出转矩不变,剩余开通相绕组的电流会增加,如图16(c)~图16(d)所示,电流有效值约为0.24 A,增加了1.2倍;根据此时的电流频率按照n=60f/p计算出电机转速,约为810 r/min,速度波动范围在15 r/min以内。当开绕组BLDCM出现一相绕组开路故障时,如图16(e)~图16(f)所示,电流有效值增大到0.29 A,增加约1.5倍,按照n=60f/p计算出电机转速约为760 r/min,速度波动范围在20 r以内。虽然电机系统的输出功率下降,但仍然能够持续运行,具有一定容错能力,验证了仿真结果。

图16 试验波形
5 结 语
开绕组BLDCM的三相绕组由独立的H桥逆变电路驱动,绕组之间没有中性点,因而具有一定的容错性能。开绕组BLDCM定转子磁路结构没有改变,可延用原有的电机生产工艺,开绕BLDCM控制器的每个器件的耐压降低一半,适合低电压宽调速应用场合。电机控制器的功率器件工作在高频开关频率下,承受较大的du/dt和di/dt冲击,发生故障的概率较大。故硬件保护电路是时效性较好的障防御措施,能及时切断系统中的故障部件。容错控制的2种常用方法:重构方法会增加系统成本,且实现过程复杂;补偿方法会使剩余相绕组的电流增大,电机输出功率减少,简单易行。
猜你喜欢
新型工业化(2021年8期)2021-10-23
电子与封装(2021年7期)2021-07-29
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年21期)2014-04-04
电测与仪表(2014年14期)2014-04-04
