
基于二阶滑模自抗扰控制的道路融冰除雪系统水泵电机优化策略*
2023-03-18 11:02殷允飞上官凌霄侯福金阎宗尧田迎军董泽蛟
电机与控制应用 2023年3期
殷允飞, 上官凌霄, 侯福金, 阎宗尧, 田迎军, 解 伟, 董泽蛟
(1.哈尔滨工业大学 交通科学与工程学院,黑龙江 哈尔滨 150090;2.山东高速建设管理集团,山东 济南 250102)
0 引 言
我国幅员辽阔,冬季天气复杂多变。路面作为直接与环境接触的构造物,在冬天受冰雪天气的影响后摩擦系数会降低了60%~75%[1],结冰覆雪路面极易造成车辆发生制动距离增加、侧滑、摆尾等危险的交通行为,同时积雪会覆盖道路标线,降低其行车诱导功能[2],从而增大引发交通事故的风险。因此,在冬季及时对路面进行融冰除雪,对于保障冰雪天气下道路正常的通行能力和减少交通事故的发生具有重要意义。
目前主流的路面除冰雪技术是以化学融雪剂、冰雪清扫机械为代表的被动式技术,以往的研究表明,被动式作业往往会对交通进行封闭,影响道路正常的运行,同时融雪剂不仅会对道路及其附属设施造成损坏,还会污染水资源及土壤[2-5]。近年来以自应力弹性路面[6]、低冰点路面[7]、加热路面[8-10]为代表的主动式除冰雪技术均有了一定研究基础,但上述主动式技术分别存在除冰雪不彻底、耐久性差、价格昂贵且路用性能不明确等缺点。另一种主动式自动融冰除雪喷淋系统技术[11],成功克服了上述主动式和被动式除冰雪技术的缺陷,而且能提前对路面结冰积雪状况决策,具有广阔的应用前景。其系统构成主要包括气象信息采集模块、控制模块、喷淋模块三部分,气象信息采集模块可实时采集路域气象与路表状态信息,并实时反馈给控制模块;控制模块根据反馈的信息对喷淋模块进行控制,喷淋模块根据所接收到的控制模块指令,自动激发喷淋系统的水泵喷淋除冰液[12]。
然而,目前喷淋模块采用的异步电机系统存在易受外部扰动、噪声振动大、效率低、且调速性能不佳及故障诊断有待优化等一系列问题。同步电机具有稳定性高、过载能力高的特点而在工业界备受关注,但是三相同步电机属于一类高度非线性和不确定系统,传统的控制算法在实际应用中遇到很多难以解决的问题。比例积分(PI)线性调节器原理简单、适应性强、性能可靠,在电机系统中应用广泛[13],然而这种控制方案需要精确的线性数学模型,在参数和负载变化下则表现不佳,为了解决该问题,学者们提出了各种控制策略来改善电机的控制性能。Feng等[14]设计了一种永磁同步电机(PMSM)反馈线性化控制策略,实现了电机转矩和磁链的跟踪控制,控制方案对电机的转矩脉动和磁链脉动均有较好的抑制效果。Omara等[15]为了在较宽的运行速度范围内保持交流电机传动的稳定性,提出了级联模糊逻辑控制策略,用于PMSM驱动系统的直接转矩控制,该策略可在较宽的运行速度范围内控制电机转矩,使电机保持了良好的动态和稳态性能。Wang等[16]提出了有限集模型预测电机转矩控制策略,该策略具有计算时间短、电流和转矩脉动小、阶跃转矩响应快等优点,可以较好地跟踪指令速度的变化。Mynar等[17]提出的基于显式模型预测控制的PMSM控制策略,不仅对电机具有线性化和约束处理方法,且允许自然磁场减弱。Bolognani等[18]提出的同步电机无参数预测电流控制方法,不仅提高了电机实时自适应能力,还可以显著降低电流谐波失真概率,同时可以使电机高效、平稳的进行扭矩传递。Niewiara等[19]研究了PMSM转矩脉动最小化问题,利用人工神经网络能任意逼近非线性特点,设计了一种自适应状态反馈控制器,从而保证电机转矩脉动达到最小化。Lin[20]针对PMSM的非线性不确定性问题,设计了一种混合递归小波神经网络控制算法,提高了PMSM转子的稳定性和负载转矩扰动下的鲁棒性。Zeghib等[21]基于扩展观测器提出了一种非线性控制策略,该策略可使电机的磁通和速度得到有效控制。Thounthong等[22]提出的基于微分平面法的伺服PMSM非线性控制算法,可对电机转速和扭矩有效调节,使电机的动态性能和稳定性得到较大提升,同时使电流得到精准跟踪。Shahriari-Kahkeshi[23]为了抑制PMSM驱动系统中的混沌现象,提出了基于自适应非线性参数逼近器的位置跟踪控制方案,该方法消除了“复杂性爆炸”和“学习参数爆炸”问题,同时抑制PMSM驱动系统混沌的能力。Zhu等[24]基于复杂网络理论,提出了永磁同步发电机混沌振荡网络的自适应脉冲控制方案,有效地提高了网络的稳定性和收敛时间,同时可以实现电机复杂网络的同步控制,提高电机的同步性能。Delpoux等[25]设计了一种鲁棒滑模控制策略对电机的位置进行跟踪,同时通过二阶滑模观测器估计电机位置、速度和加速度,该控制策略对外部扰动具有较好的鲁棒性,能够在较大的速度范围内乃至负速度下实现位置跟踪。Ni等[26]针对永磁直线同步电机的高精度位置跟踪问题,提出了一种自适应终端滑模控制策略,该方法可以使滑模超平面上的误差在有限时间内收敛到零,不仅可以提高系统状态的收敛速度,同时也对参数摄动和负载扰动具有较强的鲁棒性。Yao等[27]设计了基于滑模和无源控制的平滑切换控制器,并将其应用于PMSM伺服系统,仿真结果表明该方法克服了单纯采用滑模控制或被动控制的缺点,能有效改善电机调速系统的动静态特性。
融冰除雪水泵电机系统存在非线性、外部干扰、参数摄动等问题,传统的控制策略控制效率低、精确性差难以满足道路智能融冰除雪系统的要求。滑模控制具有对外部干扰和系统参数不确定性不敏感的特点,因而可以有效地处理复杂非线性控制系统和不确定性问题[28-31],但是滑模控制需要通过控制量的不连续开关特性来保证系统对参数摄动和外部扰动的不敏感。在实际应用中,由于系统的惯性、延迟、开关时间和空间的滞后以及测量误差等因素,使滑模控制伴随着高频抖振,高频抖振不仅影响系统的控制性能,增加系统损耗,还会激发出系统未建模动态,进一步影响系统控制性能[32-34],同时在传统的一阶滑模控制算法中,滑动误差与采样时间成正比,在很大程度上影响了控制性能,然而二阶滑模方法不仅可以保证滑动变量的连续性,而且可以保持有限时间收敛性和强鲁棒性[35-36],成功克服了一阶滑模的缺点,同时保持了一阶滑模的优点。因此,本文采用基于二阶滑模控制方法,优化道路融冰除雪喷淋系统的水泵电机控制问题,改进融冰除雪喷淋系统控制性能,以提高其工作的高效性与精准性。
1 喷淋系统PMSM数学模型
PMSM是一个典型的多变量、强耦合非线性系统,为了便于分析,忽略磁饱和效应、电机涡流和磁滞损耗,且假设励磁磁场与电枢反应磁场均为正弦分布。利用Park变换,可以得到下面的三相内置式同步电机在d-q两相旋转坐标系的数学模型:
(1)

(2)

(3)
应当指出的上述同步电机系统式(1)~式(3)是一个标称系统模型,但是实际系统往往存在参数不确定以及未建模动态等。例如d轴和q轴上的定子等效电感、定子电阻、转子励磁磁链、转子及负载惯量以及黏滞摩擦系数等,上述参数可以进一步表示成:

(4)
式中:Ld0、Lq0、Rs0、ψf0、J0、B0均为标称值;ΔLd、ΔLq、ΔRs、Δψf、ΔJ、ΔB均为系统参数不确定性部分。
假设参数不确定性部分均是未知且慢变的量。因此,需要设计一个鲁棒控制策略,能够处理这些系统的不确定性和未建模动态。
2 喷淋系统PMSM控制策略设计


图1 喷淋系统水泵控制原理图
2.1 超螺旋算法
通常滑模控制可以分两步进行设计。第一步,构建一个理想的滑模面,保障系统在滑模面上具有期望的控制性能。第二步,设计一个控制律使系统能在有限时间内切换到滑模区,并且保持滑模运动。下面将针对单输入非线性系统,设计超螺旋算法STA。
考虑下面的非线性系统:

(5)
y=s(t,x)
(6)
式中:x为状态变量,x∈Rn;u为控制输入,u∈R;s(t,x)为滑模变量,映射s(t,x):Rn+1→R;a(x)和b(x,u)为光滑的函数。
控制目标是保证滑模变量和其导数收敛到原点。分别对滑模变量求一次导和二次导,可得:

(7)

(8)
0<Γm<γ(t,x,u)<ΓM
(9)
-Φ≤φ(t,x,u)≤Φ
(10)
从式(9)和式(10),可以得到:

(11)
设计如下的SAT控制器:

(12)
式中:α1和α2为STA算法的控制参数。
从参考文献[36]可知,当控制参数满足下面的不等式,可保证系统式(5)和式(6)在有限时间收敛:
(13)
从式(12)可以看出STA控制器u是一个连续的控制信号,因此SAT可以大大减小滑模控制器的抖振。
2.2 速度调节环


(14)
式中:ds(t)为集总扰动,主要包括负载转矩TL、测量噪声以及转子励磁磁链ψf、转子及负载惯量J和黏滞摩擦系数B不确定性部分等。
从系统式(14)可看出是外部扰动ds直接影响电机转速性能,因此,需要设计扰动观观测器对其进行估测。
设计如下扰动观测器:
(15)

(16)
式中:λ为观测器增益。

(17)

(18)
式中:Fs为正的常数。


(19)
设计如下的复合控制器:

(20)


(21)
式中:αs1和αs2为正的参数。
将式(20)代入式(19),得到如下的闭环系统动态方程:

(22)
因此,根据式(13),如果控制参数满足下面的条件:
(23)
2.3 电流控制环
考虑系统的不确定性、未建模动态以及噪声干扰等,系统式(1)和式(2)可以重新表示为

(24)

(25)
式中:dd、dq分别为d、q轴电流的集总扰动。
假设集总扰动dd和dq是微分有界的,即‖dd‖≤Fd,‖dq‖≤Fq。
定义如下的滑模变量:
(26)
对式(26),求导可得:
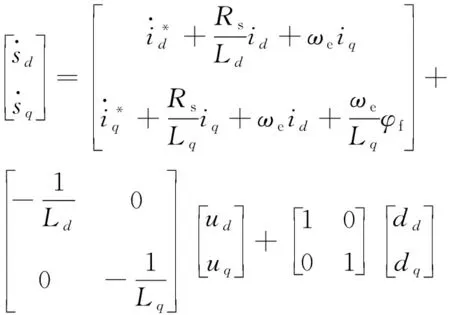
(27)
据式(27),设计如下的控制器:
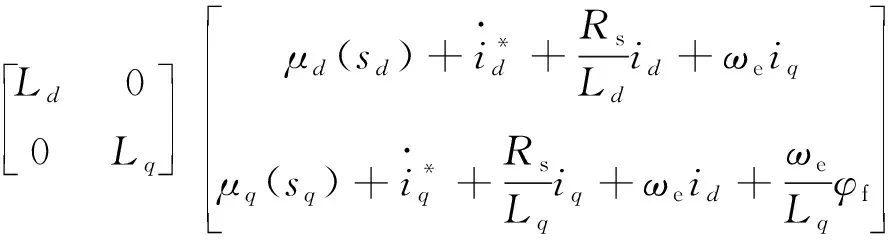
(28)
μd(sd)和μq(sq)是STA控制器,表达式如下:
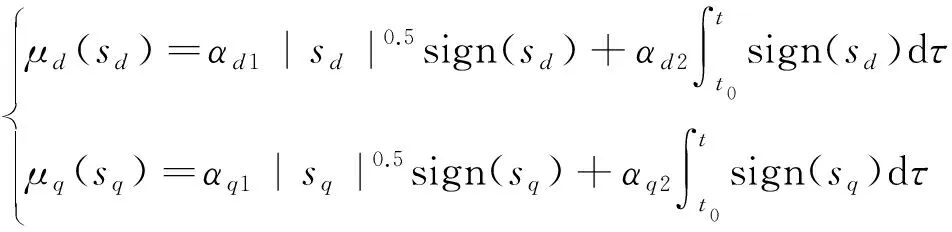
(29)
式中:αd1、αd2、αq1、αq2为正的STA控制器增益。
将式(28)代入式(27)可得:

(30)
因此,根据式(13),如果控制参数满足下面的条件:
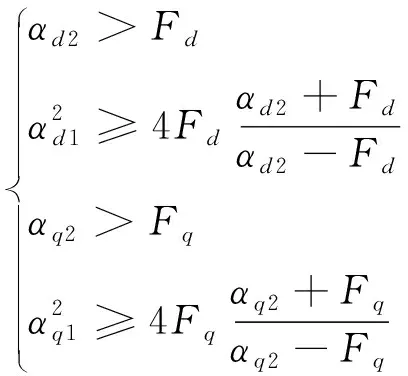
(31)
3 仿真结果
为了验证本文所设计二阶滑模控制策略的有效性,利用 MATLAB/Simulink 仿真平台搭建系统和控制模型进行验证,并与PI控制策略进行对比分析。PMSM参数如表1所示。
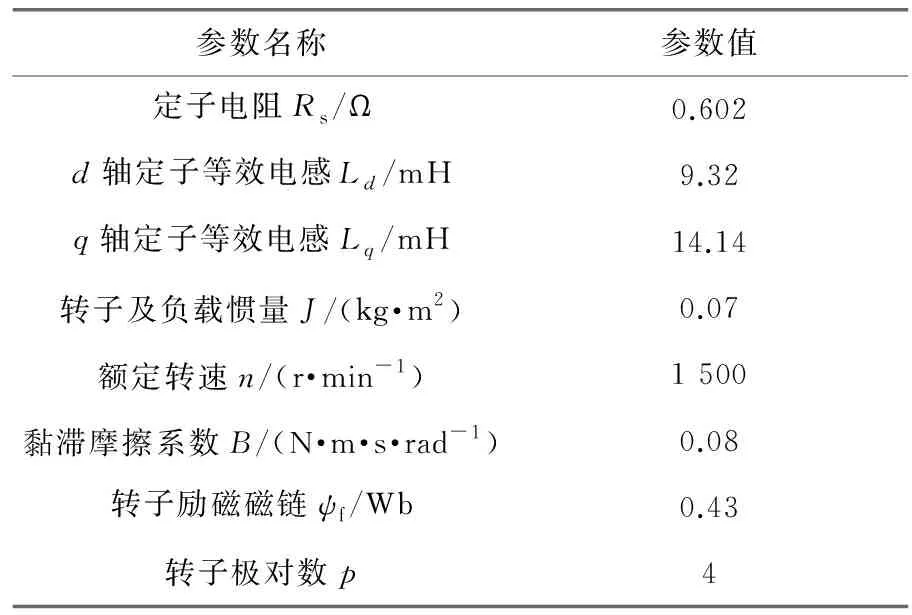
表1 电机主要参数
3.1 加减速试验
本试验,采样频率为5 Hz,给定负载转矩为5 N·m,电机的给定转速先由0 r/min升至1 000 r/min,再升至1 500 r/min,然后再降为1 200 r/min。分别采用所设计的二阶滑模自抗扰控制(ADRC)和PI控制,对比此种工况下,两个控制策略的控制性能。两个控制策略的控制参数如表2所示。

表2 PI与所设计控制策略控制参数
图2是当给定转速发生变化时,两种控制策略下的转速波形,从试验波形可以看出,两种控制策略均能够较好地调节转速至其期望值,但是所提的二阶滑模控制策略表现出更好的动态性能,尤其是当电机转速从1 000 r/min升至1 500 r/min时,二阶滑模控制策略响应时间较短,且没有出现超调。
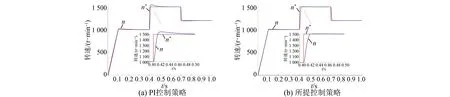
图2 电机转速波形
从图3中可以看出,两种控制策略均能够保证电流跟踪至其期望电流,但当转速发生变化时,电流均出现了超调,所提控制策略超调量较小。
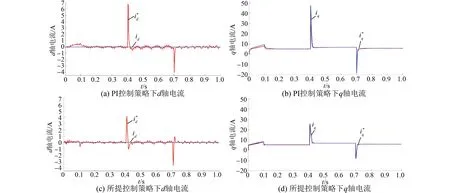
图3 dq轴电流波形
图4是两种控制策略下的三相电流波形。图5和图6给出了两种控制策略下A相电流的总谐波失真(THD)。虽然两种控制策略下电流THD均在允许范围内,但是二阶滑模控制策略的A相电流THD仅为1.98%,与PI控制策略相比,降低了0.27%。试验结果表明本文所提控制策略具有较高的谐波抑制能力。
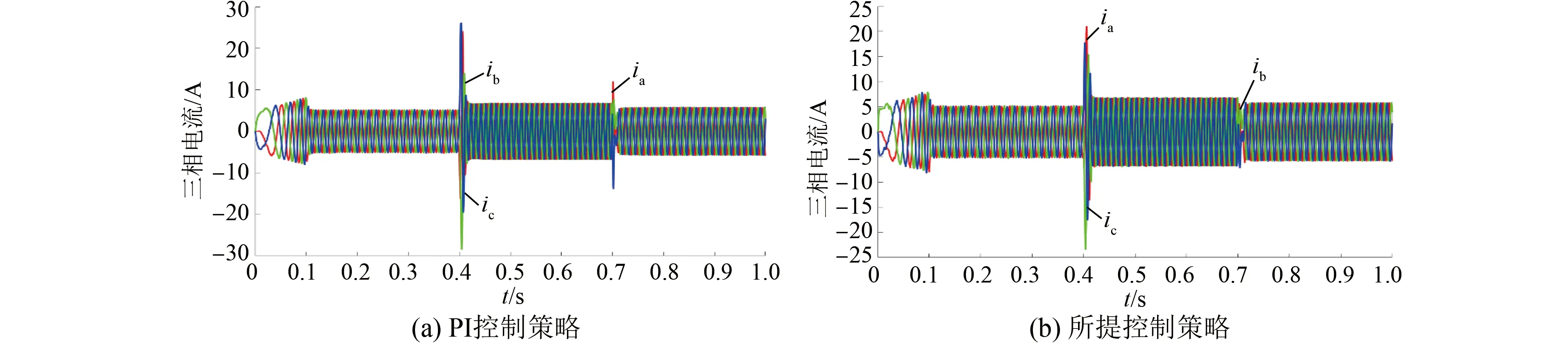
图4 三相电流波形

图5 PI控制策略A相电流THD

图6 所提控制策略A相电流THD
3.2 抗扰动试验
本试验,给定转速为1 500 r/min,对应基波频率为 100 Hz,负载转矩从0 N·m突变到10 N·m。为了保证试验对比的公平性,仿真试验中电流调节环均采用了二阶滑模控制器。控制参数保持不变。图7(a)和图7(b)分别给出了在此种工况下PI控制策略和所提控制策略的电机转速变化曲线,可以看出两种控制策略均能较好地适应负载扰动,调节电机转速至额定转速。应当指出是当负载转矩突变时,PI控制策略需要0.15 s恢复至额定转速,转速超调达到41 r/min,但是二阶滑模控制策略调节时间为0.06 s,转速
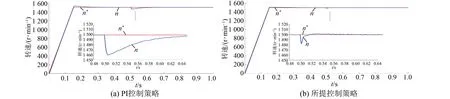
图7 电机转速
超调仅为20 r/min,大大提高了系统的动态性能。试验结果表明本文提出的方法对负载变化有较强的鲁棒性。
3.3 电机反转试验
电机反转试验给定转速为-1 500 r/min,对应基波频率为100 Hz,负载转矩从0 N·m突变到10 N·m,电流外环均采用二阶滑模控制器。保持控制参数不变,图8(a)~图8(d)分别为PI控制策略、传统滑模控制策略、未引入扰动观测器的二阶滑模控制策略和所提控制策略下的电机转速,四种控制策略均有较好的抗扰动性能,能够调节电机转速至额定转速。由图8可看出,当产生负载突变时,PI控制策略、传统滑模控制策略和未引入扰动观测器的二阶滑模控制策略的调节时间分别为0.2、0.08和0.3 s,超调值为40、30和20 r/min。而所提控制策略仅需0.05 s即可恢复至额定转速,超调值仅为15 r/min。因此,所提控制策略对负载干扰具有较好的鲁棒性。此外,图9对比了四种控制策略下的转速静态性能,可以发现传统滑模控制策略转速静态误差最大,而二阶滑模和所提控制策略能够有效抑制抖振现象,且转速静态误差较小。
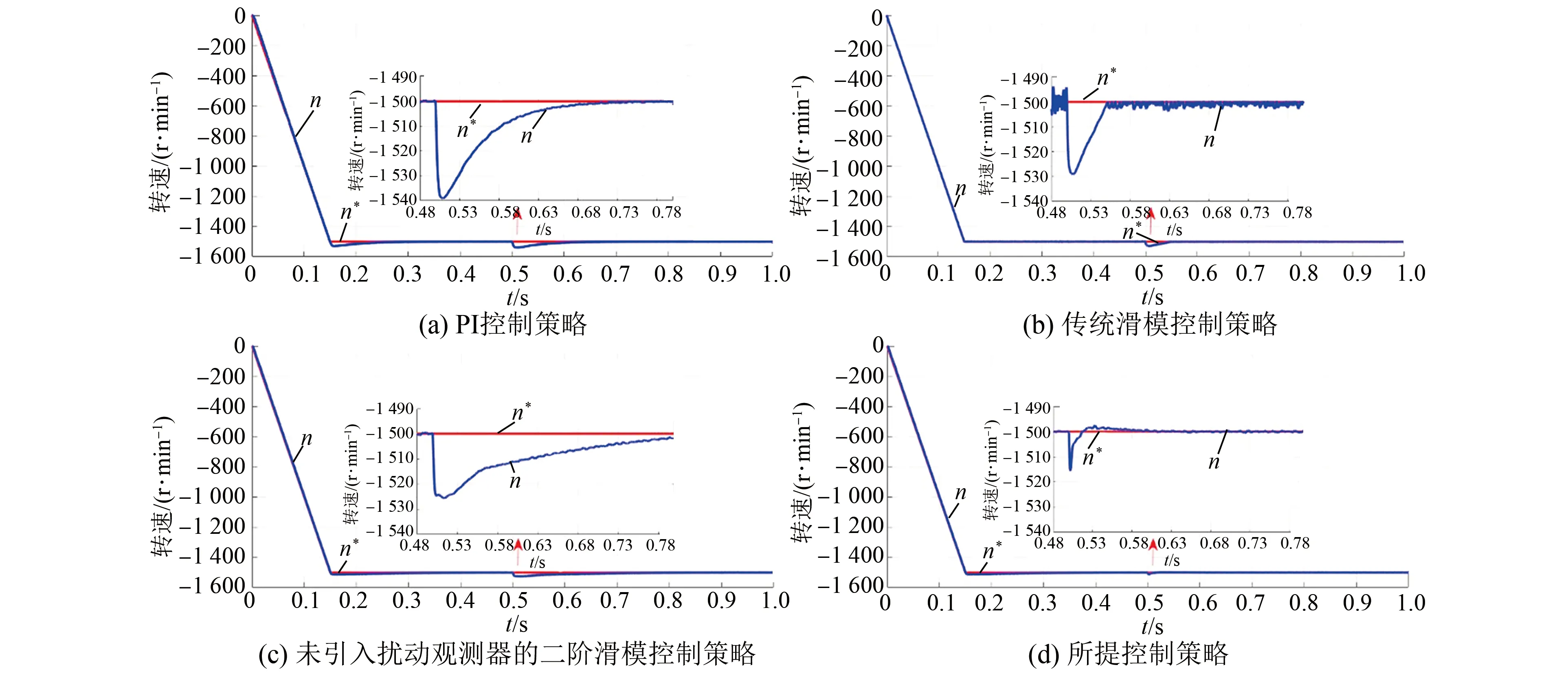
图8 电机反转试验转速
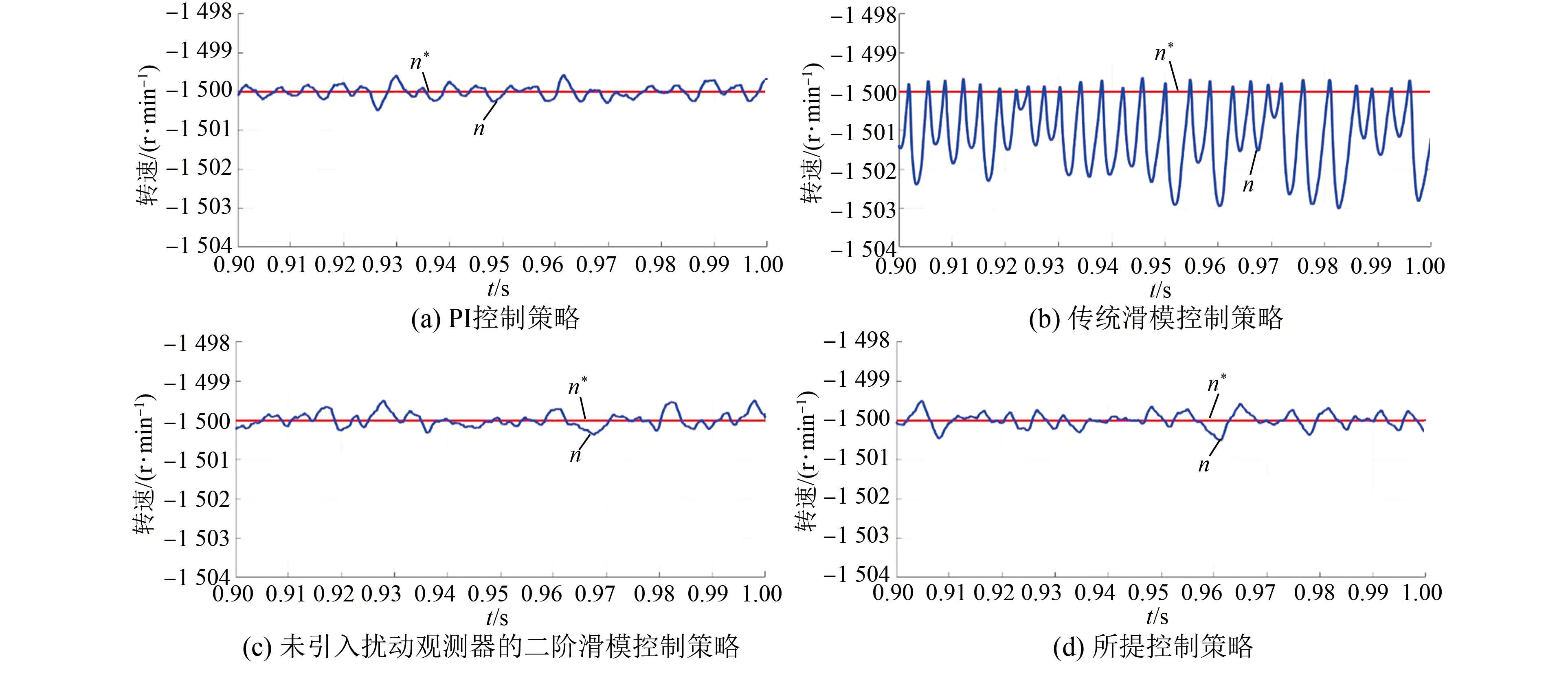
图9 四种控制策略抖振性能
4 结 语
本文提出了一种基于二阶滑模ADRC的PMSM鲁棒控制策略。建立PMSM在同步旋转坐标系下的标称系统模型和不确定性系统模型。针对电机转速动态模型,将系统参数不确定性和负载转矩看作是一个集总的扰动,并设计扰动观测器对其估计。利用二阶滑模控制技术和所估测的扰动值,在速度调节环设计复合控制器调节电机转速至其期望值并提高系统抗扰动能力。在电流控制环设计二阶滑模控制器保证dq轴电流在存在参数情况下能够跟踪其期望值。最后,通过两组仿真试验验证了所提控制策略性能的优越性,与传统的PI控制方法相比,采用基于二阶滑模自抗扰技术的控制策略在加减速试验过程中调节时间较短、超调较小且电流的THD较小。另外,在抗扰动和电机反转试验中,所提的控制策略具有明显的抗扰动和抑制抖振的能力。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
应用数学(2020年2期)2020-06-24
数学物理学报(2019年4期)2019-10-10
中国惯性技术学报(2019年6期)2019-03-04
数学物理学报(2018年6期)2019-01-28
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
贵州师范学院学报(2016年3期)2016-12-01
