
电力推进船舶低电压故障穿越技术研究
2023-03-17 00:18:40殷进军
船电技术 2023年2期
汪 敏,殷进军
应用研究
电力推进船舶低电压故障穿越技术研究
汪 敏,殷进军
(武汉船用电力推进装置研究所,武汉 430064)
低电压故障穿越技术是电力推进船舶的重要功能。本文以中海油某型双燃料电推PSV为例,通过分析不同短路点,归纳短路试验试验点选取方法。随后,针对欠压引起的非故障母排发电机电压超调,指出需通过励磁调节器的正确配置予以限制。最后,对各关联系统的设计原则进行了总结。依照本文方法,可有效避免短路故障造成的全船失电。
电力推进 低电压穿越 短路 自动电压调节
0 引言
对于船舶电网设计,低电压故障穿越是一个较新的概念。随着电推船的日益增多,低电压穿越技术的重要性日益凸显。
不同于陆上电网,船舶电网设计中对低电压故障穿越暂时没有明确的国家标准。
借鉴陆上电网,可对船舶电网的低电压故障穿越做如下定义:当电力系统中出现短路故障时,针对母线电压的快速跌落,电网中的重要设备需持续保持运行状态,直到电网中的故障被准确定位并切断隔离[1]。
当前各主要船级社规范中仅对采用Close Bus-Tie或Close Ring电网设计的动力定位船舶提出电网低电压故障穿越功能的要求。但是,对于非闭环电网电力推进船舶,低电压故障穿越的意义同样重要[2-3]。
短路故障发生后,通过选择性保护,一般都能通过母联开关将故障母排切除,但是,非故障母排成功进行低电压穿越后,又会因为发电机强励,引发过压故障,仍然使全船失电或失去动力,影响航行安全[5]。
因此,需要对电力推进船舶低电压故障穿越功能进行针对性设计,选取合适的短路点进行仿真,有条件时可进行实船验证[4]。
本文以中海油某型双燃料电推PSV为例,对短路试验的短路点的选取进行分析,对影响低电压故障穿越的各因素进行归纳。
1 短路试验方案
1.1 基本配置
该船主要负载单线图见图1。机组为3台920 kW双燃料机组。主推进设备为2台1030 kW电机,由变频器驱动。侧推为2台500 kW定距桨。
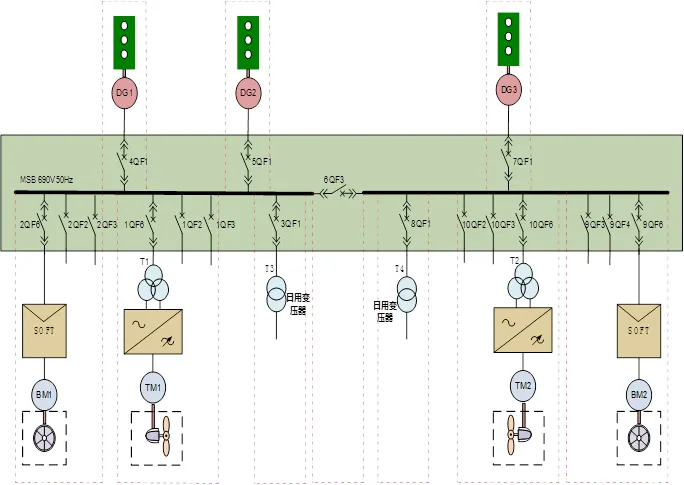
图1 主要负载单线图
为使短路试验对整个电力系统影响最小,短路试验在母联开关断开时模拟,只针对右舷。右舷1台发电机组在网时,右舷主推进支路处于工作状态。于右舷选取一开关作为试验开关,对母联开关进行模拟。另引入一短接开关,作为短路点。进行短路试验时,试验开关应先于短接开关跳开,确保发电机不因为欠压或者过压分闸。
短接开关采用施耐德NW直流系列断路器,额定电流4000 A,额定短时耐受电流85kA(1s)(DC)。该直流断路器应用在本交流系统中作为短接开关,短时耐受电流能力可满足要求。
1.2 方案1
选取右侧推控制屏内的9QF3开关为试验开关。试验方案分别见图2。
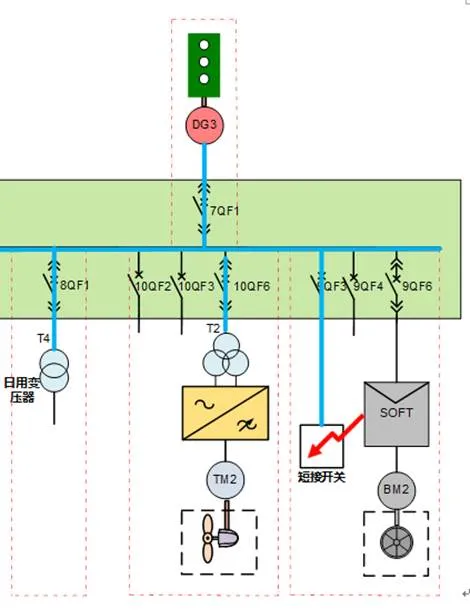
图2 试验方案1
各开关之间的协调性曲线如图3所示。在试验过程中,发生短路时,试验开关瞬时分断,短接开关和发电机开关不分断。
根据该船短路计算报告,1台机组在网时,当690 V配电支路开关9QF3短路,对称短路电流I值为6.78 kA,峰值短路电流i值为17.29 kA。此时支路开关9QF3瞬时分断,发电机开关不分断。
由分析可知,短接开关短路后,支路开关9QF3瞬时分断,此时母线电压波动情况不明显,可能还未降低就重新恢复。故需考虑采用较大的支路开关作为试验开关。
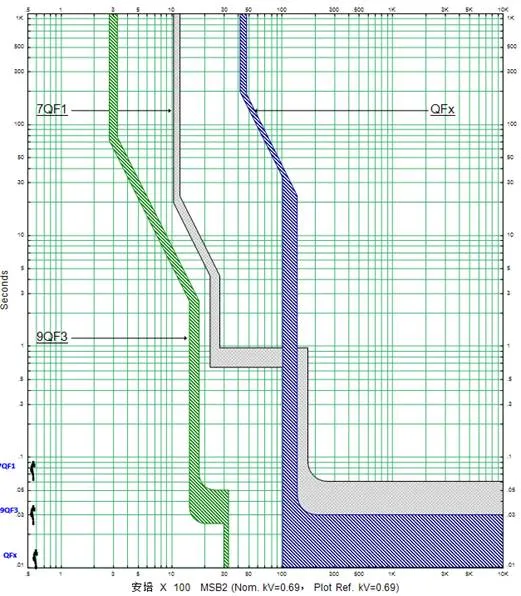
图3 方案1协调性曲线
1.3 方案2
选择右舷艏侧推主电机启动柜开关9QF6为试验开关,试验方案见图4。
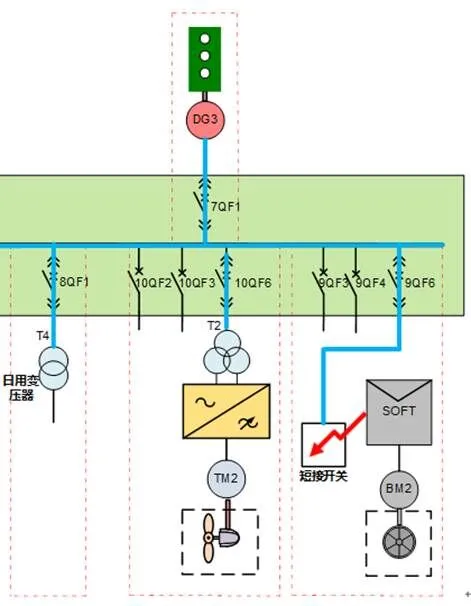
图4 试验方案2
各开关之间的协调性曲线如图5所示。
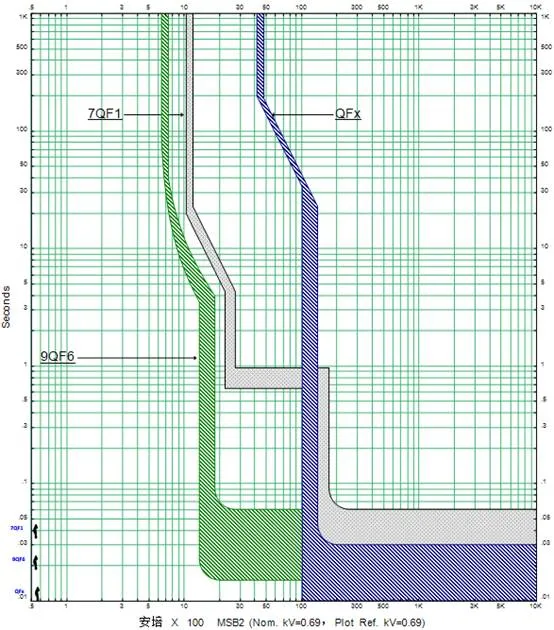
图5 方案2协调性曲线
根据图5,发生短路时,试验开关瞬时分断,短接开关和发电机开关不分断。另由短路计算报告可知,当1台机组在网,690 V配电支路开关9QF6短路,对称短路电流I值为6.78 kA,峰值短路电流i值为17.29 kA。短路情况下9QF6的分断时间20 ms左右。
由分析可知,选择配电板上现有的开关作为试验开关,短路持续的时间很短,为保证试验效果,短路持续时间需达到200 ms,应该重新选取短路接入开关。
1.4 方案3
设计短路试验柜,将短接开关与新的试验开关均装入试验柜内。方案见图6。
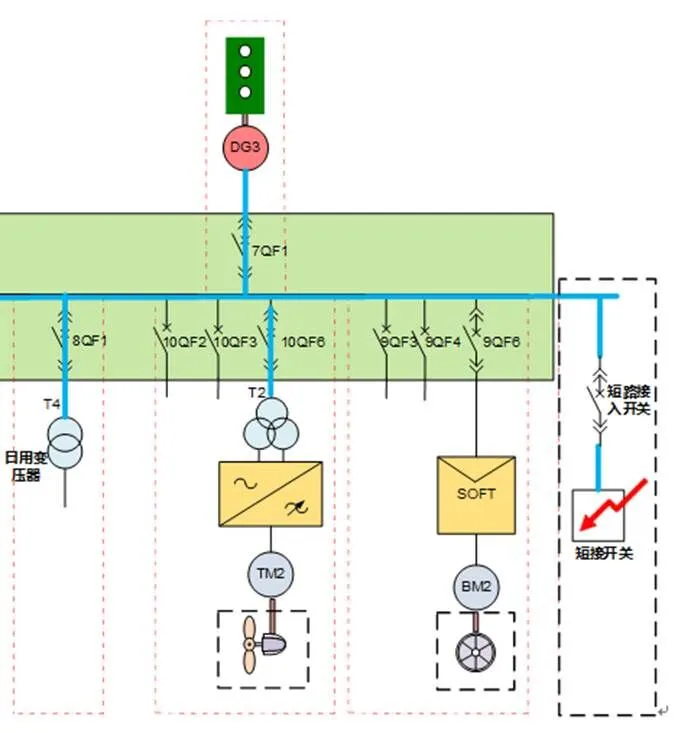
图6 方案3协调性曲线
各开关之间的协调性曲线如图7所示
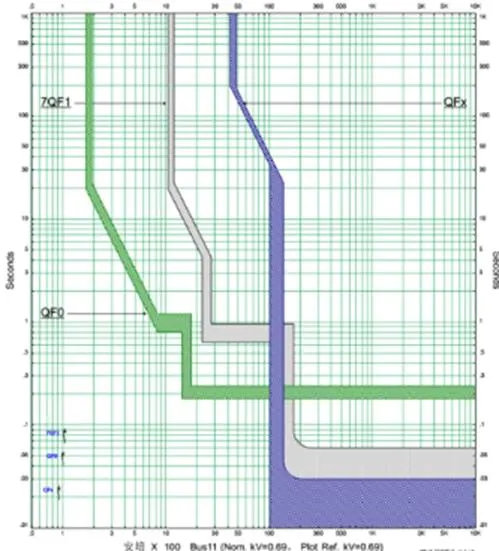
图7 方案3协调性曲线
根据图7,发生短路时,试验开关短延时分断,短接开关和发电机开关不分断。由短路计算报告可知,当1台机组在网,690 V配电支路开关短路,对称短路电流I值为6.78 kA,峰值短路电流i值为17.29 kA。短路时QF0的分断时间约200 ms。
综上,应选择方案3为实船短路试验点。
2 励磁调节器参数
短路故障发生后,整个母排均处于欠压状态,故障母排被切除后,非故障段母排仍处于欠压状态。此时发电机的自动调压装置(AVR)进入强励状态,迅速将电压拉回可接受的范围之内。如果强励参数设置不当,则非故障母排设备,尤其是推进设备有可能因为欠压故障停止运行[5]。
但是进入强励过程,电压会迅速升高,当故障母排被切除后,非故障母排在网机组有可能会因超调使电压继续升高,导致推进变频器触发过压故障停机,使船舶失去航行动力;或者因为并车单元(如PPU)触发过压保护,使发电机分闸,仍然造成全船失电。
为了确保低电压穿越后,电网能同时进行过电压穿越,需要对励磁调节器进行合理的设置。根据励磁调节器设置值,正确设置并车单元(PPU保护值)
2.1 AVR过压参数设置
发电机的AVR采用巴斯勒DECS-150数字式励磁调节器。发电机过压一般分为两级,第一级过压保护设置为1.25倍额定电压,延时0.5 s,第二级过压保护设置为1.15倍额定电压,延时2~5 s。
按照《旋转电机定额和性能》(GB/T755-2019/IEC 60034-1:2017)的标准要求,发电机可在1.08倍额定电压情况下持续工作,如图8所示。
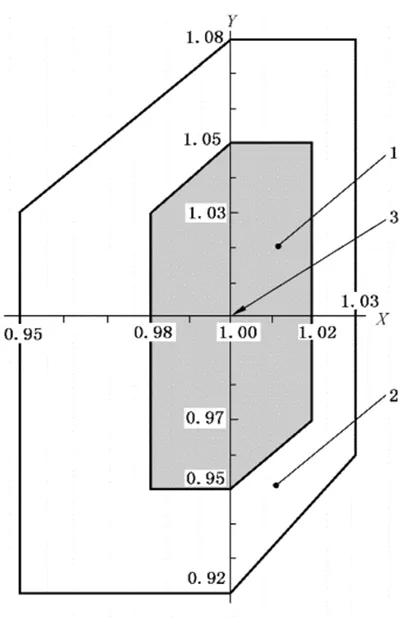
图8 发电机电压和频率的限值
2.2 AVR过励参数设置
为减小强励造成的过压,可适当调整OEL过励值,减小AVR的强励程度,电压上升值会相应减小。但是,减小OEL过励值会减小到短路时馈送的短路电流大小,影响到开关的短路跳闸和电力系统保护定值的调整,需要综合考虑。
2.3 AVR调节参数设置
AVR一般采用PID控制,不同的PID控制参数电压的调节曲线不同,可适当调整PID参数,如减小比例参数K值,减小电网电压的超调量,从而避免触发过压保护。但是,调整PID参数值会影响到发电机组的加载特性,需要综合考虑。
3 关联系统设计
实现故障穿越,不但要求机组控制及开关保护装置正确选取和配置,对于各关联系统也提出了更高的要求。
1)推进变频器需要开启动能缓冲功能,当电源电压跌落时将推进电机作为发电机向变频器直流母排回馈能量,以保证在故障穿越期间变频驱动系统始终保持合闸状态[1]。
2)推进变频器在设计时,需要保证风冷、水冷等辅助装置在短暂停止工作时,不会立即发出故障停止信号,并且保证各辅助装置在电力恢复工作后,自动恢复工作。延时时间至少大于故障穿越时间[6]。
3)发电机辅助系统参照第(2)条设计。
4)关联系统的供电开关不设欠压保护或需设置合理的欠压时间。控制系统采用冗余供电。
4 结论
在低电压穿越的整个过程中,短路故障未切除时会产生欠压,短路故障切除后会产生过压。欠压和过压是同一故障的两个阶段,需要以仿真结合实船短路试验的方式予以设计与验证。
为确保全船在低电压故障穿越时不失去航行动力,各关联系统也必须参照低电压故障穿越的需求进行设计。
[1] 庞路, 宋依群. 动力定位船闭环电网故障穿越功能实现方法探究[J]. 船舶, 2020, 31(4): 1-6.
[2] 刘一星, 蔡梅园, 陈宝刚, 等. 双馈风力发电机组低电压穿越电气模型[J]. 船舶工程, 2019, 41(S1): 272-275, 278.
[3] 黄少青. DP2自升式平台环网电站关键技术[J]. 船舶工程, 2020, 42(S1): 468-472.
[4] 刘雄航. 基于超级电容储能的船用光伏并网系统研究[D]. 武汉: 武汉理工大学, 2020.
[5] 吕世家. 船舶电力推进系统直流母线稳定控制及低电压穿越技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2013.
[6] 陶正敏. 变频器的防低电压穿越技术应用[J]. 集成电路应用, 2022, 39(3): 108-109.
Research on low voltage ride through strategy of electrical propulsion marine
Wang Min, Yin Jinjun
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
U664.14
A
1003-4862(2023)02-0024-04
2022-04-25
汪敏(1984-),男,高级工程师。研究方向:船舶电力系统。E-mail: wangminhbhs@163.com
猜你喜欢
微处理机(2024年1期)2024-03-04 05:11:02
锻压装备与制造技术(2020年2期)2020-05-12 08:54:32
四川水力发电(2018年6期)2018-12-10 05:00:52
电子制作(2017年1期)2017-05-17 03:54:27
通信电源技术(2016年1期)2016-04-16 04:57:24
电测与仪表(2016年11期)2016-04-11 12:21:04
材料科学与工程学报(2016年5期)2016-02-27 07:11:34
电测与仪表(2015年9期)2015-04-09 11:59:38
电测与仪表(2014年7期)2014-04-04 12:09:30
自动化博览(2014年6期)2014-02-28 22:31:59
