
三相LCL型并网逆变器双电流环控制器设计
2023-03-17 00:18唐清波江伟斌周诗颖杨文铁
船电技术 2023年2期
唐清波,江伟斌,周诗颖,杨文铁,徐 林,耿 攀
应用研究
三相LCL型并网逆变器双电流环控制器设计
唐清波,江伟斌,周诗颖,杨文铁,徐 林,耿 攀
(武汉第二船舶设计研究所,武汉 430205)
并网逆变器在当前电网中具有举足轻重的地位。本文针对三相LCL型并网逆变器进行了研究,建立了其数学模型,给出了其双电流环控制器的设计方法,并针对于常规双电流环控制稳定裕量低的弊端,提出了一种改进型双电流环控制策略。最后,进行了仿真验证,分析表明,在较为理想的模型下,两种双电流环控制策略均具备较为优秀的控制效果,但在非理想模型下,所提改进型控制策略具备更大的稳定裕量,更适合在实际数字控制系统中应用。
三相LCL型并网逆变器 PR控制 双电流环控制 数字控制器 控制性能
0 引言
随着“碳中和、碳达峰”目标的设立,新能源在电网中所占有的比例越来越高。根据《中国能源大数据报告(2022)》,2021年,风电和太阳能发电装机同比增长20.9%,风电装机同比增长16.6%[1]。并网逆变器作为新能源并网的接口设备,在当前电网中具有举足轻重的地位。
LCL型并网逆变器由于性能更好,体积更小,被广泛应用。然而,由于LCL型滤波器存在谐振尖峰,其控制更加困难,通常而言,需要增加额外阻尼以消除谐振尖峰,从而实现对并网逆变器的稳定控制[2]。并网逆变器可分为电压型和电流型两种,电压型通过控制输出电压间接调节并网电流,电流质量容易受到扰动影响,在实际中很少用到。电流型则直接控制并网电流,电流质量更高,并网更容易,应用更为广泛[3],通常采用双电流环控制方式,通过电容电流内环提供阻尼能力,通过输出电感电流外环实现对并网电流稳定快速的控制。
本文以三相LCL型并网逆变器为研究对象,给出其坐标系下的数学模型,基于此模型,进行了双电流环控制器设计,并提出了一种改进型的双电流环控制策略。最后,针对本文的设计结果,通过仿真进行了验证。
1 三相LCL型并网逆变器的数学模型
三相LCL型并网逆变器主电路如图1所示,主要包括三相逆变桥和LCL滤波器两部分,其中,1~6为开关管,o点为将直流电源一分为二的中点,1和2分别为逆变器端和电网端电感,在下文中,记ao、bo、co分别为逆变器三个桥臂输出点对o点的电压,aN、bN、cN分别为逆变器三个桥臂输出点对N点的电压,a_c、b_c、c_c分别表示三相滤波电容两端电压,as、bs、cs分别表示三相电网电压,又定义aL1、bL1、cL1分别表示逆变器侧三相电感电流,a_c、b_c、c_c分别表示流过三相滤波电容电流,aL2、bL2、cL2分别表示电网侧三相电感电流,而No、NN`分别为o和N及N和N`间的电势差。

图1 三相LCL型并网逆变器拓扑结构图
根据图1给出的三相LCL型并网逆变器拓扑图,选取逆变器侧电流kL1、电容电压k_c和并网电流kL2作为系统状态变量,选取逆变器侧电压kN和电网电压ks作为输入变量(其中),容易得到三相LCL型并网逆变器连续域状态方程如式(1)所示:
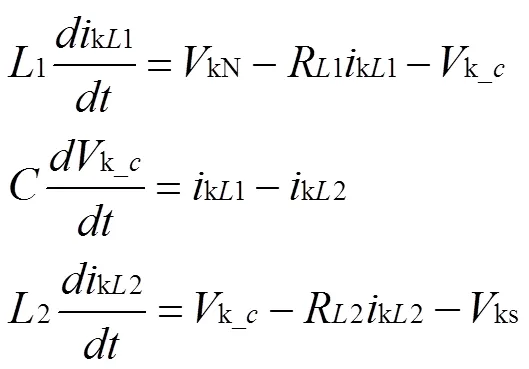

其中,R1、R2为电感1、2的内阻,对于三相系统,将其变换到坐标系下,三相系统变为两相系统,在两相静止坐标系下设计控制器更为方便,/坐标变换的变换矩阵如式(2)所示。
可得坐标系下三相LCL型并网逆变器的域模型如图2所示(考虑相对恶劣情况,忽略电感的内阻):

图2 αβ系下三相LCL型并网逆变器的s域模型
坐标变换后,三相变为等效的两相,并且,两相之间无耦合且对称,因此可以单独拿出相来研究,取逆变器参数如表1所示。

表1 并网逆变器参数
将电网电压视为扰动,则可得其开环传递函数为:

根据式(3)作出系统开环伯德图如图4所示。由于LCL谐振尖峰的影响,开环系统的幅值裕度为-110 dB,因此,系统开环不稳定,必须对其进行校正,根据文献[4],采用并网电流和电容电流双环控制可有效增加系统阻尼,从而抑制谐振尖峰。
2 常规双电流环控制器设计
本文采用模拟化设计方法对控制器进行数字化。加入双电流控制器后,控制框图如图5所示:

图5 基于PR谐振控制的双电流环控制框图
从控制框图可以求得电容电流内环闭环传递函数为:

这是一个二阶系统,其阻尼比可表示为如式(5)所示:

一般来说,可以取阻尼比为0.707,将其代入式(5)中,则可以求得电容电流内环控制参数K=63.36。
得到内环参数后,再设计外环参数。根据控制框图,可以得到并网逆变器的开环传递函数如式(6)所示:

由于所属的三相LCL型并网逆变器的控制频率是在基频及其以上的频段,因此,参数设计阶段,可以将2/(2+ω2)简化为1。
此外,假设截止频率ω满足式(7):

则可将系统的开环传递函数简化为如式(8)所示形式:

典型Ⅱ型系统的开环传递函数为式(9)所示形式:

对于典型Ⅱ型系统,一般认为选取中频宽=5时,系统各项性能指标综合最好[5]。根据典型Ⅱ型系统的系数关系,可以得到如(10)所示等式:

此时,可以求得外环控制器的两个控制参数K和K的计算式为式(11)所示:

据此,可以求得K=0.318,K=91.287。此时,ω=1211 Hz,满足前述式(7)所作假设。
工程上,由于控制器仅在谐振点处有高增益,难以应对电网频率波动的情况,一般很少采用理想控制器,通常采用式(12)给出的准控制器:

1/π表征谐振带宽,当允许频率波动±1Hz时,可得,1=2π。
结合前面求得的=63.36,连续域内控制系统参数已经整定好。
此时,并网逆变器系统开环伯德图如图6:

图6 双电流环校正后并网逆变器开环Bode图
校正后,三相LCL型并网逆变器谐振尖峰得到有效抑制,相位裕度PM达到40°,幅值裕度GM到达9.12dB。从控制器设计角度来说,系统的动态特性和鲁棒性均满足要求。
3 含电感电压反馈的双电流环控制器设计
从图6中可见,常规双电流环控制的LCL型并网逆变器幅值裕度相对较低,且由于相频特性仅在凸起部分能够取得较高的相位裕度,因此通过调整控制参数难以同时得到较高的相位裕度和幅值裕度。如果考虑寄生参数,控制延时,采样延时等非理想因素的影响,所设计的系统可能失稳。根据控制理论,如果在系统正向通道中增加一个一阶微分环节,则可以对系统中频段相位进行校正。
设计控制系统通常避免进行微分操作,因为微分会极大的放大高频噪声,因此,不能直接增加微分环节。考虑到实际的物理关系,电感电流的微分和电感端电压成正比,因此,输出电流微分环节可以采用输出滤波电感2端电压进行替代,控制系统方框图可改进为如图7所示:

图7 基于PR谐振控制的改进型双电流环控制框图
对于图7所示的系统,可写出其开环传递函数如式(12)所示。

可取KL=0.3,此时一阶微分环节的转折频率为约22 kHz。画出改进后系统的伯德图如图8所示:
改进后,系统的幅值裕度提升为Inf dB,相位裕度为58.7°,系统带宽为约1.2 kHz,系统鲁棒性得到较大幅度的优化。
4 仿真验证
为了验证前述结果的正确性,在Simulink中搭建了三相LCL型并网逆变器的电路仿真模型,仿真电路参数采用本文前述表1所述,控制参数采用章节2、3设计参数,并采用离散化控制器以模拟实际数字控制系统,仿真过程中设置输出电流I的控制指令为64 A(幅值)。可得到改进型双电流环控制下的并网逆变器关键仿真波形图如图9~11。
图9~11分别给出了改进型双电流环控制的并网逆变器输出电压电流波形图,输出电流与指令对比图,输出电流频谱图。图9中,在仿真起始阶段进行阶跃启动,输出电流快速实现稳定,稳定时间为15 ms,阶跃过程中C相电流存在55%的超调,另外两相无超调。系统进入稳态后,从图9可见并网逆变器输出波形稳定,从图10可见,稳态后输出电流相位和幅值均能准确跟踪指令值,稳态误差为0.81%。

图9 改进型双电流环并网逆变器输出电压电流仿真波形图

图10 改进型双电流环并网逆变器并网电流指令与实际并网电流对照图

图11 改进型双电流环并网逆变器并网电流频谱图
实际并网逆变器通常较理想模型有所差异,比如实际器件带有寄生参数,实际控制系统有控制延时,实际采样系统有采样误差、采样滤波延时等,图9~11给出的仿真结果已经考虑了控制延时,常规双电流环控制仿真结果与改进型双电流环控制仿真波形差别较小,这里不再单独给出。
通常数字控制系统为了抑制干扰和噪声,会在采样回路中带有RC滤波和简单的数字平均滤波。在输出电流采样、输出电压采样、电容电流采样均加入截止频率为10 kHz的一阶滤波器,此时采用改进型双电流环控制的并网逆变器仿真波型没有变化,而采用常规型双电流环控制的并网逆变器仿真波形开始恶化,其并网电流波形如图12所示。

图12 常规双电流环并网逆变器输出电流仿真波形图1

图13 常规双电流环并网逆变器输出电压电流仿真波形
为了抑制开关噪声,理论上要加入截止频率为开关频率1/10以内的滤波环节,为此,在仿真中加入截止频率为2 kHz的一阶滤波环节,此时采用改进型双电流环控制的并网逆变器仿真波形依然稳定,而采用常规型双电流环控制的并网逆变器仿真结果已经开始失稳,其输出电压电流仿真波形如图13所示。
从仿真结果可见,在较为理想的模型下,常规型和改进型双电流环控制均具备较好的控制效果,改进型控制策略尽管需要增加2个(或3个)传感器,但是相对于常规型的双电流环控制具备更优秀的稳定裕量,适合用于数字化控制系统中。
5 结论
本文针对三相LCL型并网逆变器的控制策略展开了研究,建立了其坐标系下的数学模型,给出了其在坐标系下的双电流环控制器设计方法,并通过理论分析,提出了一种改进型的双电流环控制策略。通过仿真试验,验证了所提的两种双电流环控制策略的有效性,通过对仿真结果的对比分析,发现在较为理想的仿真模型下,两种双电流环控制策略均具备较为优秀的控制效果,本文所提改的进型双电流环控制策略尽管需要增加更多的电压传感器,但是具备更大的稳定裕量,在考虑到更多非理想因素场景下,依然能保持控制系统的稳定性,适合在实际数字控制系统中应用。
[1] 中能传媒研究院. 中国能源大数据报告(2022)[R]. [2022-05-10]. https://xdyanbao.com/doc/582kmc83c9?bd_vid=7859864922514538688.
[2] 阮新波, 王学华等.LCL型并网逆变器的控制技术[M].北京: 科学出版社, 2015: 1-40
[3] 赵迎迎.LCL型并网变换器电流控制技术研究[D].华中科技大学, 2017.
[4] 徐志英,许爱国,谢少军.采用LCL滤波器的并网逆变器双闭环入网电流控制技术[J].中国电机工程学报, 2009, 29(27): 36-41.
[5] 宋吉峰.LCL并网逆变器的设计与控制研究[D].华中科技大学, 2014.
Design of dual current loop controller for three-phase LCL-type grid-connected inverter
Tang Qingbo, Jiang Weibin, Zhou Shiying, Yang Wentie, Xu Lin, Geng Pan
(Wuhan Second Ship Design and Research Institute, Wuhan 430205, China)
TM464
A
1003-4862(2023)02-0060-05
2022-07-20
唐清波(1994-),男,工程师。研究方向:舰船电力系统及电力电子技术。E-mail: 1694794078@qq.com
猜你喜欢
燃料化学学报(2022年5期)2022-05-30
一重技术(2021年5期)2022-01-18
哈尔滨铁道科技(2020年4期)2020-07-22
测控技术(2018年4期)2018-11-25
合成化学(2015年4期)2016-01-17
海军航空大学学报(2015年1期)2015-11-11
电测与仪表(2015年12期)2015-04-09
电机与控制应用(2015年2期)2015-03-01
电测与仪表(2014年13期)2014-04-04
电测与仪表(2014年14期)2014-04-04
