
基于模糊区间优化的建筑空调系统预测控制方法
2023-03-17 01:38苏啸天崔家瑞窦浩然
北京工业大学学报 2023年3期
杨 旭, 苏啸天, 涂 壤, 崔家瑞, 窦浩然
(1.北京科技大学自动化学院, 北京 100083; 2.北京科技大学土木与资源工程学院, 北京 100083)
随着我国经济的飞速发展,城市化的进程也在不断加快. 同时,由于工业化和信息化时代的来临,办公建筑逐渐成为城市建筑的核心组成部分,城市人员在办公建筑中的时间大大超过其他类型的城市建筑. 舒适的办公环境可以使人员心情舒畅,注意力集中并处于兴奋状态,有助于工作效率的提高[1]. 研究表明,新鲜的空气可使工作效率提升11%,优质的工作环境可使短时记忆功能提升25%. 相反地,如果室内工作人员长时间处于不舒适的工作环境,会导致人员出现疲劳、头昏、烦躁、注意力不集中的病态建筑综合征,降低工作效率[2]. 然而,大量的既有办公建筑由于经济水平和技术限制,其室内环境并不能满足舒适性的要求. 目前,建筑室内环境主要是通过空调系统的调控来改善. 因此,通过优化空调控制策略提升建筑室内环境和健康智能的品质有十分重要的意义.
关于人体对热舒适感受的研究,大多围绕由丹麦Fanger教授提出的预测平均投票(predicted mean vote, PMV)指标[3]展开. 该指标由人体代谢、人体机械做功、空气湿度、空气温度、服装热阻、对流换热系数等室内环境参数及人体自身的参数计算得到[4]. 经过实验和研究发现,人员实际的热感觉与PMV模型的预测普遍存在偏差,这是由于人体对舒适的感受在不同的地理环境和气候区域存在差别[5]. 同时,由于人与人的个体差异,相同环境下人的热感受也有所不同[6],使用一个通用的数学描述定义人体对环境的舒适感受在某些场景下存在局限性. 由于人体对冷、热、舒适的感受评价是主观、连续且模糊的,舒适感受可以被定义为一个舒适的温度区间,模糊规则常用来优化非精确的数学模型问题[7]. 因此,本文提出基于模糊规则隶属度函数的舒适温度区间划分及优化方法,通过对室内人员的舒适评价数据进行统计与模糊分析来评价室内人员的舒适感受.
此外,办公建筑的室内温湿度环境主要通过暖通空调系统进行调控,传统空调系统常采用经典的比例积分微分(proportional-integral-derivative control, PID)控制策略,实践证明其应用在建筑系统是稳定可靠的,但随着空调系统的长时间运行,暖通空调设备的老化会导致其控制性能和效果的下降. 同时,由于空调系统内置的PID控制器结构和参数通常无法被用户改变,也给传统的控制系统的控制算法重构设计带来阻碍. 基于此,研究者多采用智能算法实现对空调系统设定值的优化. 王晓辉等[8]提出了一种基于神经网络的空调系统智能调控方法,王思明[9]提出一种基于机器学习算法的空调优化控制方法,智能优化算法的参数确定需要大量数据进行训练,易陷入局部最优[10]且其效果与训练数据的质量有关,容易出现过拟合现象. 另外,神经网络和机器学习等优化控制方法的求解过程相对复杂,需要占用较高的硬件计算资源,在某些硬件资源有限的嵌入式终端中难以实现,从而导致了上述算法在部分应用场景的局限性. 模型预测控制(model predictive control, MPC)可以很好地解决以上问题. 它可以利用历史数据以及未来信息对一定时域的控制目标进行预测,通过优化计算得到最优控制律,将控制动作施加于系统,使输出能够跟踪参考轨迹. 相较于其他方法,MPC算法仅需得到系统的输出预测模型,使其更容易在既有建筑的暖通空调系统中实现.
本文基于对室内人员热舒适感受和室内温度控制策略的分析,采用区间控制与MPC相结合的控制策略,提出了一种基于模糊区间优化的建筑空调系统预测控制方法.
1 基于模糊规则的热舒适区间优化
1.1 舒适评价指标
Fanger教授提出的PMV评价指标常用来表征人体对环境的感受,其公式[3]为
PMV=(0.303e-0.036M+0.028)×{M-W-
3.05×10-3×[5 733-6.99(M-W)-Pa]-
0.42[(M-W)-58.15]-1.72×
10-5M(5 867-Pa)-0.001 4M(34-ta)-
3.96×10-8fcl[(tcl+273)4-
(tr+273)4]-fclhc(tcl-ta)}
(1)
式中:M为人体能量代谢率,取决于人体活动量大小,W/m2;W为人体所做机械功,W/m2;Pa为人体周围水蒸气的分压力,kPa;ta为人体周围空气温度,℃;fcl为服装的面积因子;tcl为衣服外表面温度,℃;hc为对流换热系数,W/(m2·K).
PMV评价指标采用了7级的分类,分别是冷、凉、微凉、舒适、微暖、暖、热,对应PMV值为-3~3,如表1所示.

表1 PMV等级
为测试人体对实际办公建筑室内环境的感受和PMV指标是否一致,本文通过实验收集室内环境中计算PMV所需要的参数,通过公式计算得到PMV值,同时实验人员对当前办公环境的实际感受做出评价,实验数据如表2所示.

表2 热舒适实验参数
通过对10位人员的热舒适度评价与PMV计算得到的评价进行评估,准确率不足50%.根据文献[5],这是由于PMV指标是针对欧美环境及人群所建立的,而对于不同国家地区的人群以及地理气候环境,PMV指标的适用性无法达到让人满意的效果.因此,针对我国北方办公建筑,需要更好地利用建筑环境中的各项数据,采用其他方法进行更合理的热舒适度评价.
其中,温度作为评价热舒适环境的重要指标,它可以看作是一个模糊的集合.某一温度对于人体热舒适感受来说可能隶属度有所不同,如27 ℃可能隶属于微热的隶属度高,隶属于冷的隶属度低.因为不同的人对相同温度下的热舒适感受以及同一人在相同温度、不同状态下的热舒适感受都不尽相同,同时,人对温度的感受评价也不是离散的而是连续的,所以采用模糊的方式对热舒适度区间进行优化是有必要的.
1.2 基于隶属度函数的舒适区间
从实验样本中获取模糊规则是最常用的方法[11],本文对热舒适度评价数据的收集实验是在北京某高校办公建筑的示范房间进行的,在房间中安装了环境监测仪以对室内环境温度数据进行实时采集,同时,房间的变制冷剂流量(varied refrigerant volume, VRV)空调用以调节室内温度.
实验通过调控空调改变室内温度,对10位被测人员所提供的不同温度下的热舒适度评价进行收集,评价指标依然按照PMV分为冷、凉、微凉、舒适、微暖、暖、热7类.实验在7月份夏日空调使用时期的连续14天内进行,从每天早上8点到下午6点,每15 min对当前温度进行一次热舒适度评价,一共收集了504组评价数据,去除明显异常数据,共获得487组有效数据,如表3所示.

表3 热舒适评价
本文采用模糊统计法来计算某一温度隶属于不同模糊集的隶属度,即通过该温度属于各模糊集的次数占该温度总个数的比例来确定其对应的隶属度.通过对各个热舒适度评价数据进行拟合分析可知,热和冷评价的隶属度函数近似属于半梯形类型函数,如图1、2所示.

图1 模糊集热的隶属度函数Fig.1 Membership function of fuzzy set heat

图2 模糊集冷的隶属度函数Fig.2 Membership function of fuzzy set cold
对凉、微凉、舒适、微暖、暖5种模糊集的评价数据进行拟合分析,可知其隶属度函数均近似属于高斯型函数,分别求取凉、微凉、舒适、微暖、暖5种数据类型的均值和方差,得到其对应的高斯函数,如图3所示.

图3 模糊集凉、微凉、舒适、微暖、暖的隶属度函数Fig.3 Membership function of fuzzy set cool, slightly cool, comfortable, slightly warm and warm
从图1、2可看出,当温度高于某一温度后,其隶属于热的隶属度从0上升到1,同理,当温度低于某一温度后,其隶属于冷的隶属度从0上升到1,而对于其他评价来说,在到达其均值温度之前其隶属度会升高,当超过其均值温度后其隶属度会下降.
取热舒适度评价模糊集中隶属度大于70%的温度区间作为热舒适区间,即需要将室内温度控制在 26~27 ℃.同时,根据ASHRAE标准[12],在0.25 h(即15 min内),温度的浮动在1.1 ℃范围内为舒适可接受范围,验证了本文所提出的基于模糊规则的热舒适区间的合理性.实验人员对2种热舒适度评价指标的满意度进行对比,PMV评价方法的满意度为36%,模糊舒适区间评价方法为70%,证明本文提出的模糊舒适区间更符合人体的热舒适感受偏好.
2 基于热舒适区间的MPC算法
2.1 模型预测控制
MPC是一种常用于处理离散系统带约束优化问题的控制方法,其算法形式主要包括预测模型、滚动优化和反馈校正三部分[13].预测模型的功能是根据系统的历史信息和未来输入预测其未来输出.滚动优化是反复在线进行的优化算法,在每个采样时刻,通过预测模型求解未来有限时域的开环最优控制问题,并执行最优控制序列的第1步.反馈校正是为了防止模型失配或者环境干扰引起输出对理想状态的偏离,通过检测系统的实际输出,在优化求解控制作用前,先利用这一反馈信息修正下一步的预测和优化,从而构成闭环机制.
因为空调系统内置的PID控制器结构和参数通常无法改变,所以本文采用前馈MPC控制器对空调施加控制动作,使系统输出能够跟踪参考轨迹,MPC结构如图4所示.

图4 MPC结构Fig.4 Structure of MPC
2.1.1 预测模型
因为建筑的热工特性具有高复杂、多干扰、大时滞等特点,所以为了更好地对室内温度进行预测,需要建立一个合理的温度预测模型.建筑室内每一时刻的温度都受到多种热源的共同影响,包括围护结构传热、太阳辐射传热、空调供冷量、人员散热等.通过对建筑热工过程的分析,可以构建白箱模型作为温度的预测模型,其模型主要通过建筑的外围护结构(门、墙壁、屋顶、窗户)的物理传热系数以及整个房间的热平衡方程来获取[14].但是,白箱模型在实际的构建过程中有很大的缺陷,由于很难获取建筑的外围护结构的实际物理参数,这会导致模型的精度低.基于数据驱动的黑箱建模是近些年最常用的建模方法,不需要知道对象详细的机理模型,只需通过输入输出数据训练就可得到对象的模型[15],这种方法方便建模并且精度更高,但是需要大量的数据,数据过少可能会导致模型不准确.本文考虑结合2种建模方法的优点,先根据白箱机理确定对象模型的基本结构,同时,根据机理对模型进行降阶处理,分析机理去除冗余的变量,使得模型的阶数既能完整地表达对象的特点,也有利于计算速度的提升,这样只需收集对模型辨识有用的关键数据,降低了收集数据的工作量,之后再通过数据训练得到对象的模型[16].
本文对温度的预测是动态时域的预测,在时间序列上温度是连续存在的.状态变量是通过采样得到的离散值,输入变量也是离散的,因此,将连续时间状态空间方程离散化,得到离散下的状态空间方程.状态变量选择室内温度和室内湿度[17],建筑室内的温度分布并不均匀,空调附近的工作区域空气温度和非临近空调位置的空气温度有差异,并且也会互相影响.为了更详细地通过模型预测室内温度,将非临近空调区域的温度作为一种状态变量加入模型中,称其为回气区域温度[18].通过图5的传热分析可以得出,输入变量选取室外温度、太阳辐射强度、空调供冷负荷,其中室外温度和太阳辐射强度作为干扰输入作用于系统,空调供冷负荷作为控制输入作用于系统,空调的供冷负荷通过空调自身的控制器进行控制,可以通过调整空调的设定温度和设定风速来改变供冷负荷,因此,选择空调设定温度与空调设定风速作为系统的控制输入.系统的状态空间方程可写为

(2)
式中:x=[x1x2x3]T为状态向量,x1、x2、x3分别为室内工作区温度、室内湿度、室内回气区温度;u=[u1u2]T代表控制输入向量,u1和u2分别为空调设定温度和空调设定风速;w=[w1w2]T代表干扰输入向量,w1和w2分别为室外温度与太阳辐射强度;y代表输出变量,即室内温度预测值;A、B、C、D分别为状态矩阵、控制输入矩阵、输出矩阵和干扰输入矩阵.

图5 建筑传热示意图Fig.5 Schematic diagram of building heat transfer
模型中的所有变量都可以通过测量得到,只有A、B、C、D四个参数矩阵未知,因此,在得到系统模型的结构后,还需要通过模型参数辨识来获得参数.
预测模型的辨识过程如图6所示.

图6 建模流程Fig.6 Modeling process
2.1.2 滚动优化
MPC的滚动优化过程为在每个采样时刻求解有限时域内的优化问题,将计算得到的最优控制序列的第1项作用于系统,使得系统输出能够跟踪上参考轨迹.
本文对下一时刻的室内温度进行预测,以当前室内的温度、湿度状态作为初始状态,结合未来N个时间步的室外温度和太阳辐射强度作为干扰输入信息,对未来N个时间步的室内温度进行预测.结合式(2)首先预测未来N个时域的状态,公式为
(k+1)=Ax(k)+Bu(k)+Dw(k)
(k+2)=Ax(k+1)+Bu(k+1)+Dw(k+1)=
A[Ax(k)+Bu(k)+Dw(k)]+
Bu(k+1)+Dw(k+1)=
A2x(k)+ABu(k)+ADw(k)+
Bu(k+1)+Dw(k+1)
(3)
(k+N)=Ax(k+N-1)+Bu(k+N-1)+
Dw(k+N-1)=A[Ax(k+N-2)+
Bu(k+N-2)+Dw(k+N-2)]+
Bu(k+N-1)+Dw(k+N-1)=…=
ANx(k)+AN-1Bu(k)+AN-2Bu(k+1)+…+
Bu(k+N-1)+AN-1Dw(k)+
AN-2Dw(k+1)+…+Dw(k+N-1)
再通过状态计算得到系统的预测输出
(k+1)=C(k+1)=CAx(k)+
CBu(k)+CDw(k)
(k+2)=C(k+2)=CA2x(k)+CABu(k)+
CADw(k)+CBu(k+1)+CDw(k+1)
(k+N)=C(k+N)=
CANx(k)+CAN-1Bu(k)+CAN-2Bu(k+1)+…+
CBu(k+N-1)+CAN-1Dw(k)+
CAN-2Dw(k+1)+…+CDw(k+N-1)
(4)
MPC为使得预测输出能够跟踪上参考值,需要求解优化目标函数
(5)
2.2 基于热舒适区间的MPC算法
区间控制的目标是将被控变量控制在设定区间中,当被控变量出现的波动超出设定区间时,控制器能够快速施加控制动作,使得控制变量迅速回到区间内,而当被控变量一直在区间内时,控制器就不会施加进一步的控制动作,提高了系统的鲁棒性[19].广义上来说,所有控制都可以当作区间控制,设定值控制也可以看作是一种特殊的区间控制,其区间为0,区间的上限与区间的下限相等.

(6)
式中:约束项的第1项为系统动态特性约束,即系统的输出由前一时刻的状态x、控制输入u以及干扰w计算得到.区间惩罚原则是当预测输出超出给定区间时,则施加惩罚;若不超出区间,则不施加惩罚.
3 实验平台验证
本文提出的基于模糊规则隶属度函数的热舒适区间以及基于区间的MPC,在北京某高校办公建筑的示范房间以及建筑环境智能监控系统上进行了实际验证.房间的平面图如图7所示,整个系统平台的结构如图8所示.

图7 建筑平面Fig.7 Layout of the architectural

图8 建筑环境智能监控系统结构Fig.8 Structure of intelligent monitoring system for building environment
实验所采用的办公建筑房间共分为3个部分,分别为会议区、办公区A与办公区B,其中办公区A在独立的封闭区域.在每个区域内均安装环境监测仪对当前位置的温度以及湿度进行采集,采样周期为15 min.房间中有一台VRV空调,可满足夏日供冷需求,空调位置在会议区的正对面.
建筑环境监测平台中上位机显示层的功能是进行人机交互,接收智能网关收集的环境数据、空调控制数据和智能电表数据,同时,主动从气象站请求获取室外温度以及太阳辐射强度预报数据,并对数据进行分析和图形化的界面展示.网关传输层的功能包括数据采集和智能控制两部分.基于区间的MPC算法嵌入智能网关中,可以实现通过算法对空调系统的智能调控.系统收集的参数如表4所示.

表4 监控系统采集的数据
模型参数辨识需要足够的输入输出数据,通过建筑环境监测平台对空调使用房间8:00—20:00的室内温湿度数据、空调设定温度和风速数据以及室外温度与太阳辐射强度进行收集.将会议区环境监测仪1采集到的温度作为工作区温度,将办公区B环境监测仪2采集到的温度作为室内回气区域温度,室内湿度选择采集到的平均湿度.采样时间间隔为15 min,将收集到的离散数据分为状态数据、输入数据以及输出数据,使用最小二乘辨识方法对系统模型中的A、B、C、D四个参数矩阵的系统参数进行辨识.
用测试集数据对辨识后的模型进行测试验证,其测试结果如图9所示.

图9 模型温度预测仿真Fig.9 Simulation of model temperature prediction
本文通过对测试结果进行分析,将三阶模型的预测精度与二阶模型进行对比,三阶模型的预测温度与实际温度在1天内的均方根误差(root mean squared error, RMSE)为0.113 3 ℃,远小于二阶模型的误差0.321 5 ℃.从图中可以看出,误差值非常小,足以满足MPC精度的需求.因此,本文选择用三阶模型作为MPC的预测模型.
为对比测试本文所提出方法的控制效果,选择8月份中室外温度和太阳辐射强度相近的3天,分别使用传统控制方法、常规MPC控制方法和本文提出的基于热舒适区间的MPC方法进行室内温度的调控效果对比.
首先,采用传统控制方法,即让室内人员根据自身感受手动调节空调的设定温度与风速,系统的输出室内温度如图10所示.

图10 传统控制方法的室内温度曲线Fig.10 Curve of indoor temperature in traditional control
可以看出,由于不能提前预知系统的干扰,室内人员只有在自身感受到不舒适时,才会对空调进行设定值调节,这样会导致系统的输出响应严重滞后.因此,只有当建筑的热环境发生很大改变后,用户才会继续对空调系统进行调控.同时,从图中可以看出,从下午4点左右开始,室外温度和太阳辐射强度有所下降,但此时空调系统仍持续制冷,导致室内温度出现较大降幅,在降低人体的热舒适度感受的同时也浪费了大量的能耗.
同时,本文也通过采用常规MPC控制方法进行实验对比,将房间早上的初始状态输入到系统中,并将当天的天气预报数据(包含室外温度和太阳辐射强度的未来数据)也输入到系统,其1天的室内温度输出结果如图11所示.

图11 常规MPC室内温度曲线Fig.11 Curve of indoor temperature of conventional MPC

图12 基于热舒适区间的MPC算法室内温度曲线Fig.12 Curve of indoor temperature of MPC algorithm based on thermal comfort zone
可以看出,由于MPC控制算法可以根据当前状态以及未来的信息对系统输出进行预测,并借助滚动优化计算得到控制器的最优控制律,从而根据控制律提前施加控制动作,使系统输出保持在设定值附近.
最后,将本文所提出的控制策略嵌入建筑环境智能监控系统,并作用于某办公室,从上位机平台可以看出,其室内温度的输出结果如图12所示.办公建筑的室内温度始终维持在基于模糊隶属度定义的热舒适区间,并且由于控制策略可以提前将未来天气输入到系统中,预先对系统进行优化计算并施加控制动作,保证了建筑室内环境的热舒适度.
常规MPC和区间MPC的控制效果对比如表5所示.2种控制方法下的系统输出室内温度的均值都在26.5 ℃左右,其RMSE均可满足室内人员的热舒适感受,但常规MPC由于输出总是偏离设定值,使控制器的输出(即空调系统设定值)频繁改变,进而导致空调压缩机的转速变化频率增加[20],加快压缩机和风机的磨损与老化.采用区间MPC后,其控制量温度设定值与风速设定值如图13中绿色曲线所示,若系统的预测输出仍在区间内,就无须重新对目标函数进行优化计算,MPC控制器不会将新的控制动作输出到空调系统,可有效降低建筑空调系统设定值的动作次数,保证空调压缩机系统可长时间高效运行.

表5 常规MPC与区间MPC控制效果对比
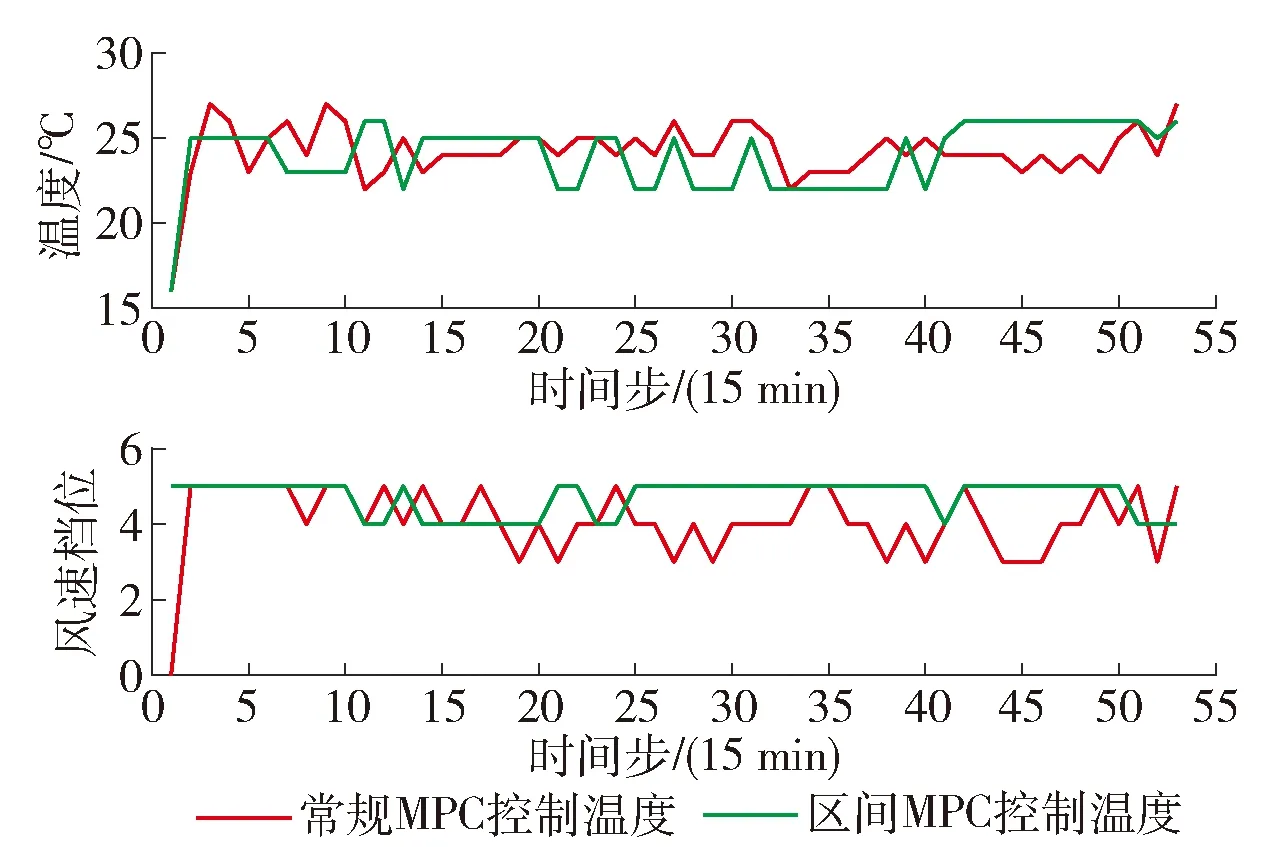
图13 常规MPC与区间MPC控制设定值对比Fig.13 Comparison of control settings of conventional MPC and interval MPC
4 结论
1) 为了更合理地评价办公建筑室内人员的热舒适感受,本文采用模糊规则隶属度函数优化热舒适度评价指标,构建满足人体热舒适的温度区间.通过实验对室内人员的人体热舒适度评价进行统计,满意度提高了34%.
2) 在本文所提出的热舒适区间的基础上,结合区间控制与MPC算法对空调系统进行调控,在满足办公建筑室内人员的热舒适感受的同时,可以减少MPC控制器输出的频繁动作.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
资源信息与工程(2021年5期)2022-01-15
现代装饰(2020年3期)2020-04-13
中国外汇(2019年13期)2019-10-10
建材与装饰(2018年5期)2018-02-13
小学阅读指南·低年级版(2017年5期)2017-05-18
汽车维护与修理(2016年10期)2016-07-10
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
汽车维护与修理(2015年7期)2015-02-28
中国工程咨询(2014年4期)2014-02-16
