P2.5构型PHEV规则型能量管理策略研究
2023-03-14 03:49张嘉璐林城华徐利吉
重庆理工大学学报(自然科学) 2023年2期
罗 勇, 张嘉璐, 林城华, 徐利吉, 隋 毅, 孙 强
(1.重庆理工大学 汽车零部件先进制造技术教育部重点实验室, 重庆 400054;2.重庆科技学院 机械与动力工程学院, 重庆 401331;3.宁波圣龙(集团)有限公司 技术中心, 浙江 宁波 315048)
0 引言
插电式混合动力汽车(plug-in hybrid electric vehicle,PHEV)相比于传统燃油汽车车具有更低的油耗,同时又兼顾动力性和排放性,成为了目前汽车市场关注的焦点[1]。由于纯电动车型依然存在里程焦虑的问题,伴随着原材料和电池涨价、油价上涨的消息,混动车型开始占据大量汽车市场份额。插电式混合动力汽车具有多种动力驱动模式,能够兼顾动力性和燃油经济性,在当下市场上更具有竞争力。
基于P2.5混合动力系统构型的PHEV把驱动电机集成在变速器的某一输入轴,可直接通过离合器和变速器驱动行驶,同时与发动机协同工作,油电衔接更顺畅。同时,P2.5混合动力系统通过搭配多种速比优化了工作范围,有效提高驱动和制动效率,相比于P3构型,不需要额外的低压电机启动发动机和能量回收,能够减小体积与成本,而且其油电耦合冲击度小,有助于提升驾驶舒适性。由于驱动电机集成于变速器内部,也减小了额外的空间需求。该混合动力系统通过双离合变速器,可以实现P2构型模式的怠速充电、纯电动起动、混合驱动、P3构型模式的混合驱动等[2]。因此,P2.5构型相比于其他几种构型,具有多方面的优势,在插电式混合动力汽车上具有较大的研究价值和应用前景。
合理高效的能量管理控制策略直接决定了PHEV整车的的动力性和燃油经济性。基于P2.5构型的PHEV的工作模式较多且更为复杂,使得对该构型的能量管理控制策略的要求更高。近年来,诸多学者针对不同构型PHEV能量管理策略进行研究,针对P2.5构型的研究还较少[3-4]。因此,本文以P2.5构型的插电式混合动力汽车为研究对象,提出一种基于规则的能量管理控制策略。
本文通过对P2.5构型的动力传动系统进行分析,结合P2.5构型的优点,将其划分为多种工作模式。基于SOC的逻辑门限值的思想,提出基于CD-CS的多阶段控制策略,利用Matlab/Simulink并根据实验数据和理论模型相结合的方法对PHEV各个关键部件进行数学建模并采用多种标准工况进行仿真对比分析。
1 P2.5构型PHEV的模式分析与建模
1.1 PHEV的动力系统分析
本文将基于P2.5构型的PHEV作为研究对象,其结构包括发动机、P2.5驱动电机、动力电池组等部件。P2.5驱动电机和发动机可以分别作为单独的驱动动力源,当需求扭矩大时,也能进行双动力源扭矩的耦合,整车总体结构简图如图1所示,车辆相关参数如表1所示。

图1 P2.5构型PHEV系统结构示意图

表1 车辆相关参数
1.2 PHEV系统工作模式分析
本文研究的P2.5构型PHEV工作模式主要包括:纯电动驱动、发动机驱动、轻载充电、混合驱动和再生制动。各个工作模式之间的切换依靠发动机和P2.5驱动电机之间离合器C1、C2的接合与分离,不同模式下动力系统相关部件的工作状态如表2所示。

表2 各部件在不同工作模式下的工作状态
在各个工作模式的挡位切换中,驱动电机可供使用的挡位有3个,发动机可供使用的挡位有7个。在混合驱动的工作模式中,由于结构的受限以及策略不采用等原因,发动机和电机联合驱动时挡位的配合共可以构成9种动力传递模式,如表3所示。在挡位的切换过程中,T表示过渡阶段,在混合驱动时,需要电机升挡时,要求其先通过同步器切换挡位与发动机耦合进入T模式,再要求发动机正常切换挡位进入C模式。在C3到C4模式切换中,需要先变化为T1,在C5到C6模式切换中,需要先变化为T2[5]。

表3 电机和发动机联合驱动下的工作挡位
各工作模式分析如下:
1) 纯电动驱动模式
纯电动驱动模式下动力电池组向P2.5驱动电机提供电能,驱动电机将电能转化为机械能驱动车辆。该模式适用于中低负荷,整车需求转矩需要满足在电机的峰值转矩内,并且要求电池电量充足,即电池SOC值较高。该模式可以避免发动机工作在低速低转矩的不经济的工作区,能有效降低能耗。
2) 发动机驱动模式
发动机驱动模式下,当发动机在1、3、5、7奇数挡工作时,离合器C1接合;当发动机在2、4、6偶数挡工作时,离合器C2接合。该模式驱动电机都处于关闭状态,由发动机单独提供车辆需求功率,适用于中高速和中等负荷的情况,这样发动机可以工作在高效工作区间。
3) 轻载充电模式
轻载充电模式下,离合器C2接合,发动机作为唯一动力源驱动车辆,同时系统为了保证发动机的高效工作,多余的能量为电机提供扭矩,最终向动力电池充电。该模式适用于中低速、低负荷且电池电量不足的情况。
4) 混合驱动模式
混合驱动模式下,当离合器C1接合时,发动机工作挡位在1、3、5、7奇数挡,与工作挡位在2、4、6偶数挡的驱动电机在主减速器处进行动力耦合,形成P3型混合驱动模式。当离合器C2接合时,发动机和驱动电机则在变速器输入端进行动力耦合,形成P2型混合驱动模式。该模式下电池电量较高时,主要以电机驱动,反之则以发动机驱动为主,2个动力源互相弥补各自外特性外的整车需求扭矩。
5) 再生制动模式
再生制动模式下驱动电机切换为发电机,产生反转力矩为动力电池充电。当车辆制动减速时,车辆就会进入制动能量回收模式,此时不需要动力源输入,所以离合器断开。当车辆进行紧急制动时,在保证安全性的情况下,还需要进行机械制动使车辆减速。
1.3 PHEV整车模型的建立
PHEV整车仿真模型的建立采用前向仿真模型。前向仿真模型根据驾驶员发出的加速或者制动踏板指令控制发动机和电机的动力输出,能量流方向是从电机或者发动机开始,经过车辆传动系统传递到车轮[6],其模型结构如图2所示。
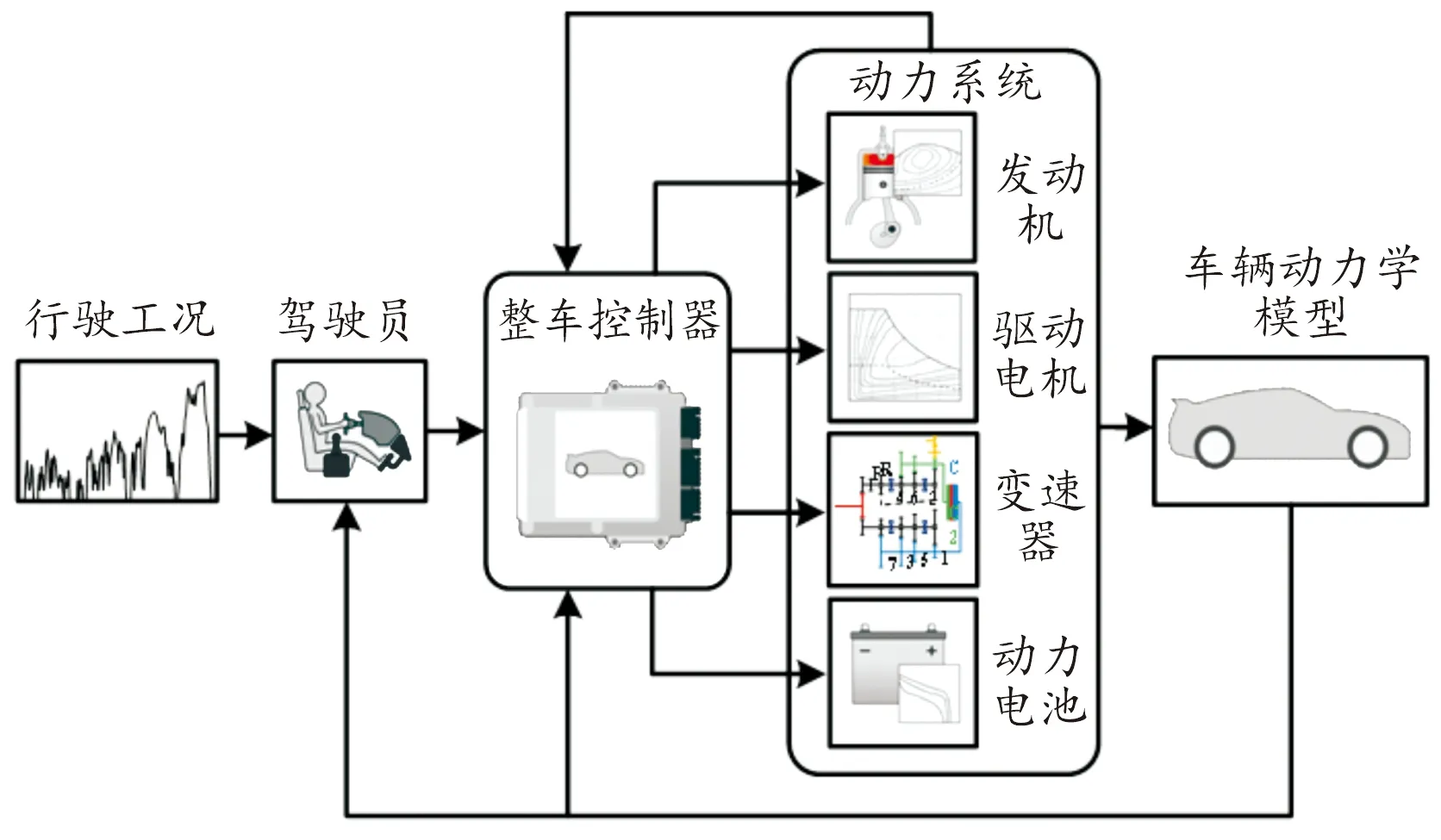
图2 PHEV整车仿真模型结构框图
1.3.1驾驶员模型
采用PID的控制方式引入驾驶员模型,驾驶员模型的输入为当前的行驶工况与实时车速的误差值,输出为驾驶员的加速踏板或制动踏板的操作指令。其原理如式(1)(2)所示。
ve(t)=vt(t)-va(t)
(1)
(2)
其中:vt(t)为目标车速;va(t)为实际反馈车速;ve(t)为目标车速与实际车速的偏差;θ[-1,0]为制动踏板开度;θ[0,1]为加速踏板开度;kp为比例调节系数;ki为积分调节系数。
1.3.2发动机模型
本文侧重对发动机燃油消耗的计算求解,不考虑发动机内部复杂的动态过程。根据混合动力系统发动机试验数据,运用实验建模方法建模。图3为发动机的油耗特性图。
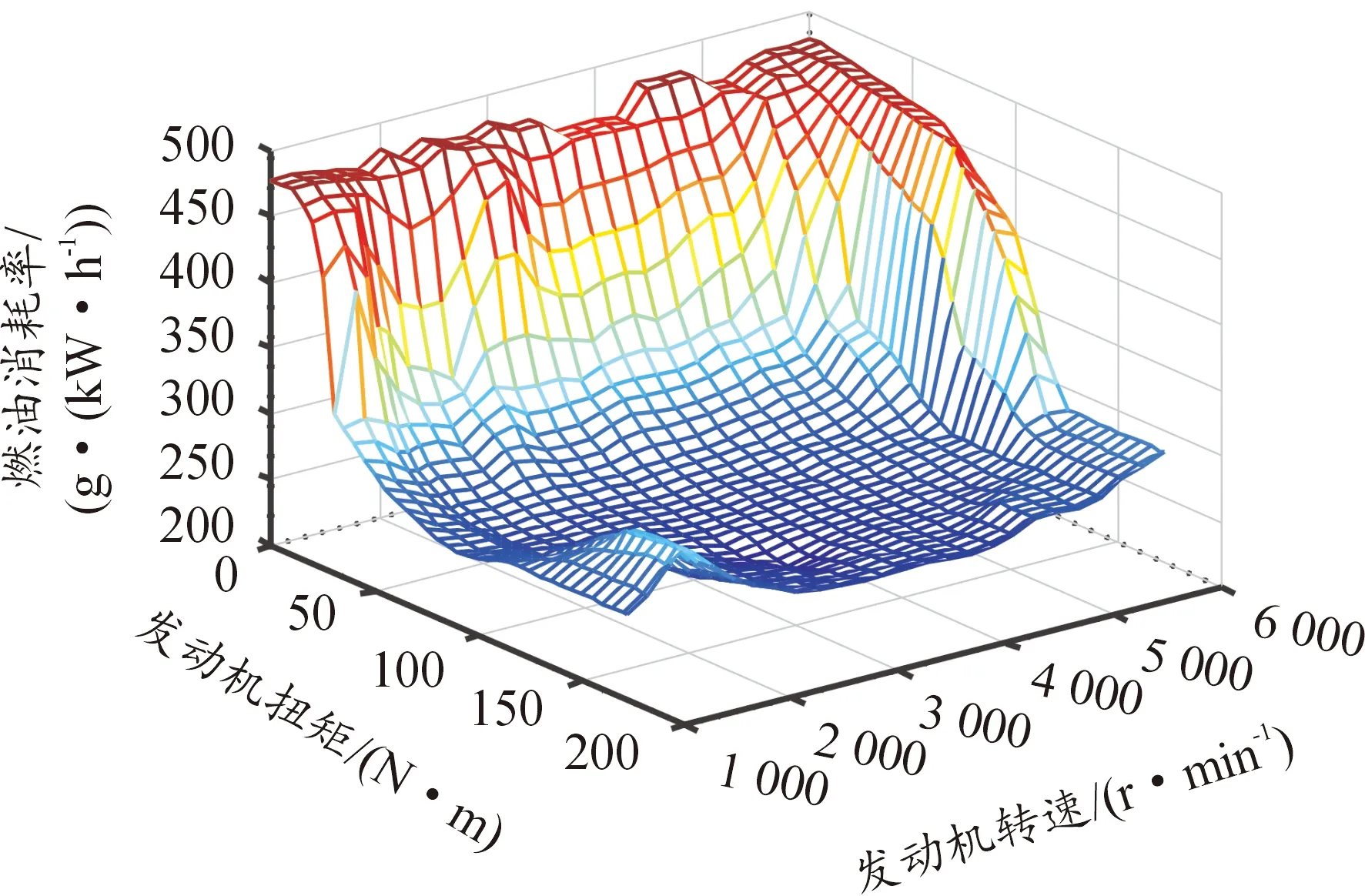
图3 发动机油耗特性图
发动机的燃油消耗率、输出功率、单位时间油耗由如式(3)—(5)所示。
be=f(Te,ne)
(3)
(4)
(5)
其中:be为发动机燃油消耗率(g/kW·h);ne为发动机转速(r/min);Te为发动机扭矩(N·m);Pe为发动机输出功率(kW);ρ为燃油密度(kg/L);g为重力加速度(m/s2);ρg取6.96~7.15(N/L)。
1.3.3驱动电机模型
P2.5驱动电机的作用主要有2个,一是作为电机向外输出机械扭矩,二是作为发电机向动力电池组充电。运用P2.5驱动电机的试验数据得到的特性参数进行建模[7],电机效率特性如图4所示。
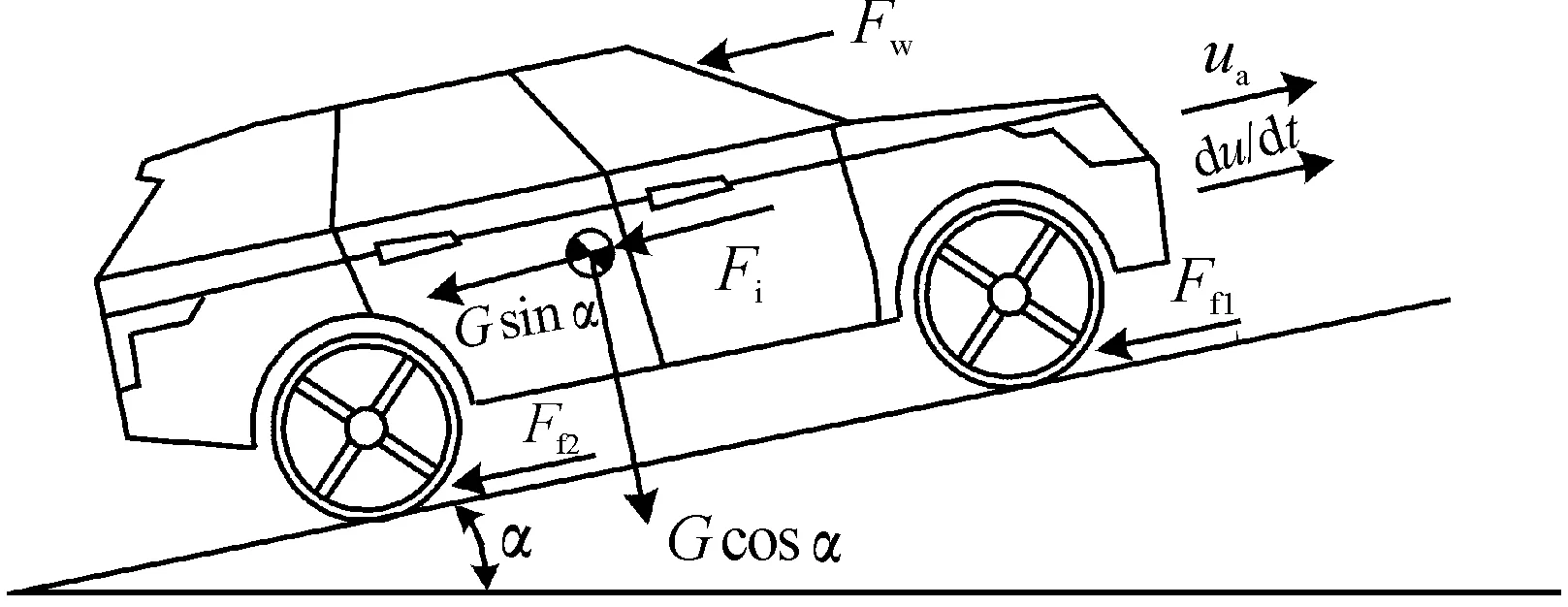
图4 电机效率特性图
驱动电机的效率、功率如式(6)(7)所示。
ηm=f(Tm,nm)
(6)
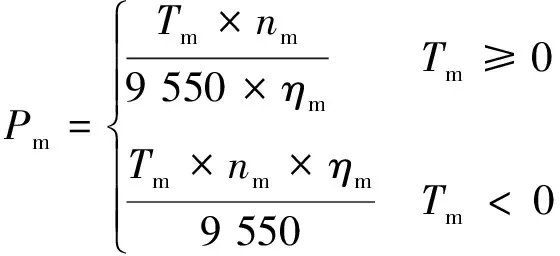
(7)
其中:ηm为电机效率;Tm电机扭矩;nm为电机转速(r/min);Pm为电机功率(kW)。
当Tm≥0时,电机进行驱动工作;当Tm<0时,电机输出为制动转矩和发电转矩。
1.3.4动力电池模型
在建立PHEV动力电池模型时,将电池转化成一个理想电压源和一个内阻串联的等效电路。本文结合充放电试验数据,进行电池等效内阻模型的搭建[8],如图5所示。图中,Voc为电池组开路电压(V),R为电池内阻(Ω),U为电池端电压(V)。
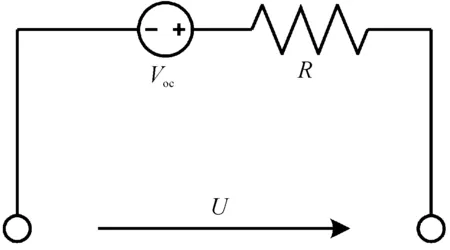
图5 电池等效电路内阻模型示意图
根据实验所获得的数据,绘制单体电池Voc、充电内阻和放电内阻与电池SOC值的关系曲线如图6。

图6 单体电池OCV-SOC曲线
动力电池的端电压、输出功率、电路电流如式(8)—(10)所示。
U=Voc(SOC)-Ibat·R(SOC)
(8)
(9)
(10)
采用安时积分法[9]计算电池SOC,如式(11)所示。
(11)
式中:Ibat为电池充放电电流(A);Pbat为电池输出功率(kW);Cbat为电池容量(Ah);SOC0为电池初始SOC值。
1.3.5车辆动力学模型
基于汽车行驶方程式建立车辆动力学模型,汽车受力情况如图7所示。

图7 汽车受力分析示意图
汽车行驶方程如式(12)(13)所示[10]。
Ft=Ff+Fw+Fi+Fj
(12)
(13)
其中:Ft为汽车行驶阻力之和;Ff为滚动阻力;Fw为空气阻力;Fi为坡度阻力;Fj为加速阻力;Tf为行驶力矩之和;r为车轮半径;m为整车载荷;g为重力加速度;f为滚动阻力系数;α为坡道阻力系数;CD为风阻系数;A为迎风面积;v为车速;δ为旋转质量换算系数; du/dt为行驶加速度。
2 基于规则的能量管理控制策略
PHEV的电能可以通过外接电网或者电源等方式来获取[11],能充分利用电能,从而实现节能减排,所以在满足整车动力性的情况下,应该充分利用电池电量,提升车辆的经济性和排放性。根据上文所搭建的车辆相关部件模型,本节建立了基于规则的能量管理策略,该策略实时性好、实用性强,在实际运用上较广泛[12]。
采用CD-CS策略,依据电池值的变化轨迹,将PHEV的工作阶段分为电池电量消耗(CD)和电池电量维持(CS)2个阶段,并根据电池值制定相应规则来进行2个模式的切换,如图8所示,该策略的目的在于满足动力性的前提下,使PHEV在行驶里程内尽可能使用电池的能量来减小油耗[13]。
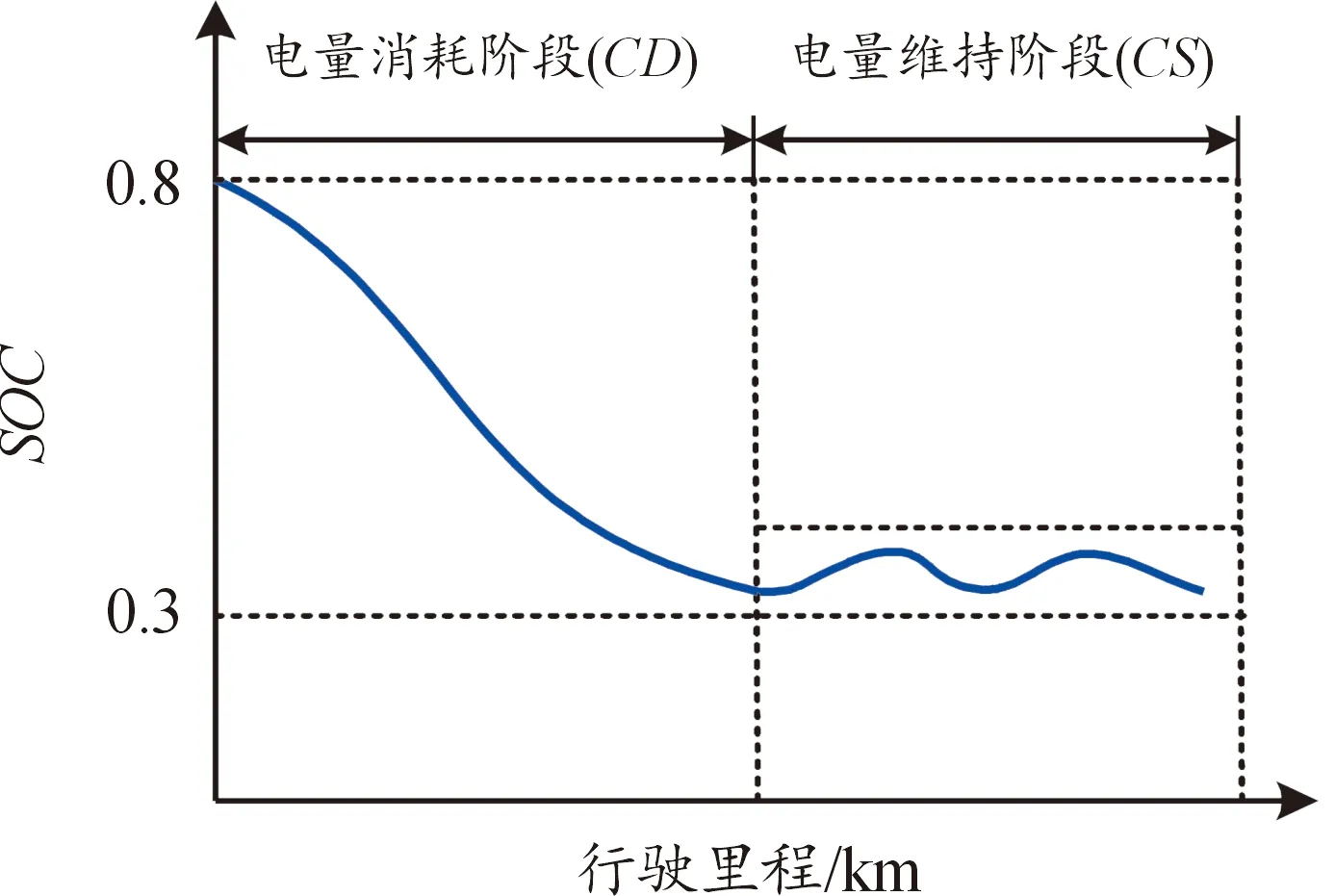
图8 电池组电量消耗过程分析曲线
2.1 CD阶段控制策略
当电池电量较高时,汽车运行在CD阶段,以电机驱动为主。当行驶里程小于车辆的纯电动续航里程时,PHEV就会一直保持在纯电动驱动模式。若整车需求转矩大于电机峰值驱动转矩,发动机进行辅助驱动。CD阶段驱动模式划分曲线如图9。

图9 CD阶段驱动模式划分曲线
在纯电动驱动模式下,若电池值保持在正常范围内,发生制动时,进入再生制动模式,进行制动能量回收。当电池值较高,为了避免电池发生过度充电的情况,P2.5电机则不再进行制动能量回收,采用机械制动。当汽车进行紧急刹车或是制动力需求较大时,首先考虑机械制动。CD阶段的切换逻辑如表4所示,表中各参数含义说明如表5所示。
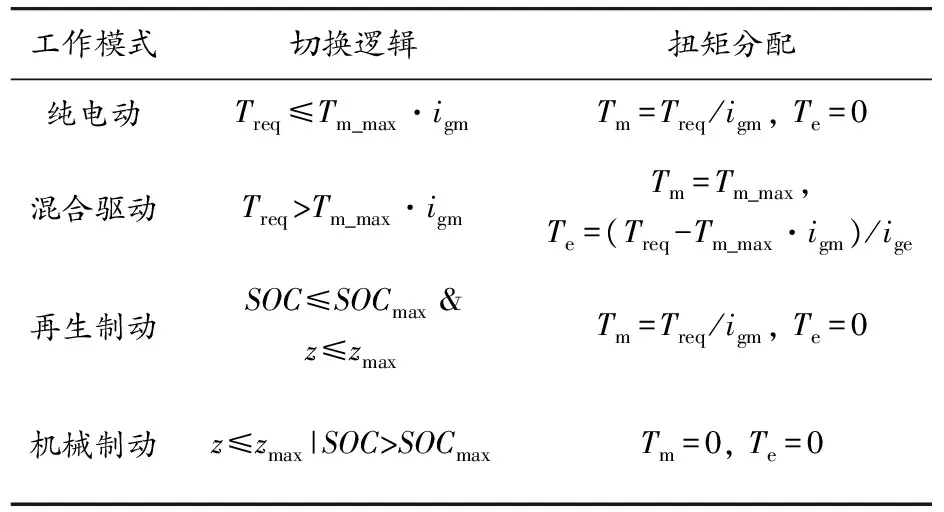
表4 CD阶段切换逻辑
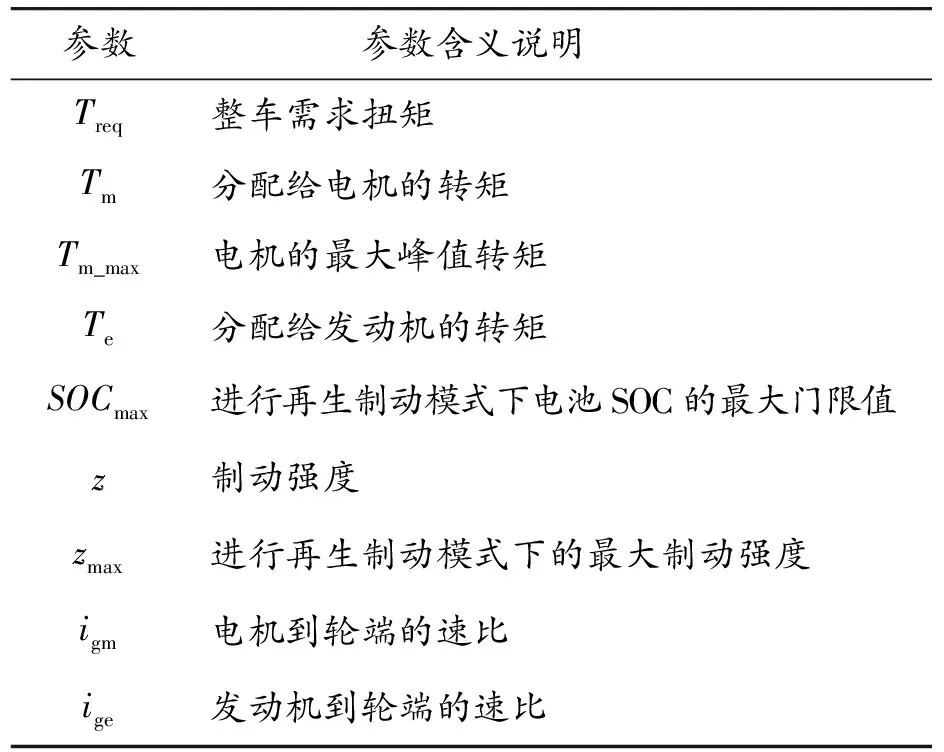
表5 表4中各参数含义说明
2.2 CS阶段控制策略
当电池SOC下降到设定的门限阈值时,车辆进入到电池电量维持CS阶段。该模式主要以发动机作为驱动电源,电机作为辅助,该阶段包括了PHEV所有的工作模式。CS模式从电池的寿命、成本和安全考虑,为了不让电池值过低对电池造成损耗,因此使电池值维持在一个较低的范围内。
当发动机转速较低且小于怠速转速时,同时整车需求转矩在电机的外特性之内,使用纯电动驱动模式。当整车需求转矩在发动机高效区以下,变速器挡位在偶数挡时,为使发动机保持在高效区间工作,发动机将为P2.5电机提供反转扭矩,进入轻载充电模式。当整车需求转矩处于发动机高效区间,进入发动机驱动模式。当整车需求转矩大于发动机最大转矩时,进入发动机和P2.5电机混合驱动模式[14]。另外,汽车依据制动强度、变速器挡位等门限值确定制动最大转矩,从而判断车辆是否进入机械制动还是再生制动。CS阶段驱动模式划分示意图如图10,CS阶段模式切换条件和转矩分配规则如表6所示,表中各参数含义说明如表7所示。
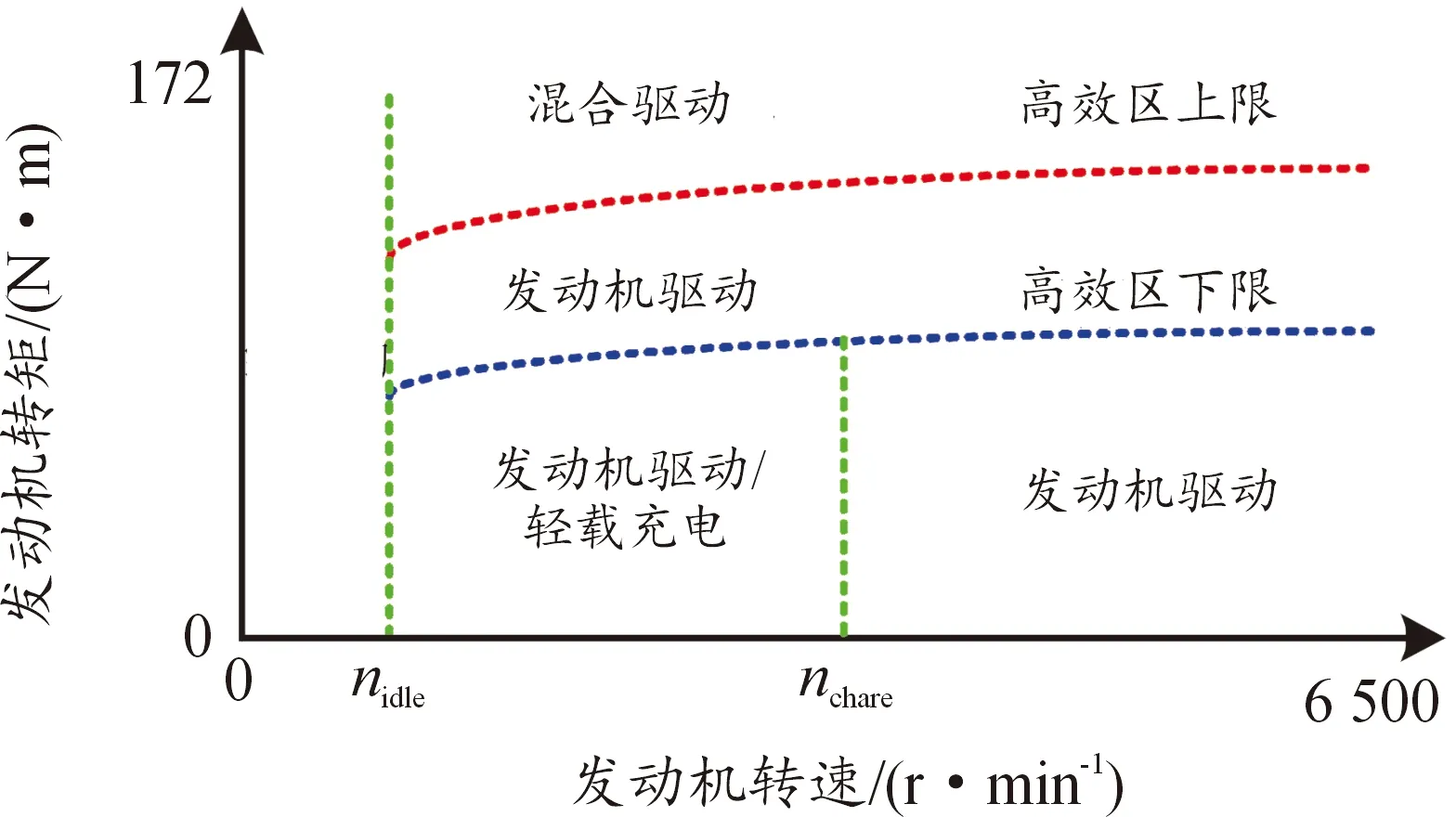
图10 CS阶段驱动模式划分示意图
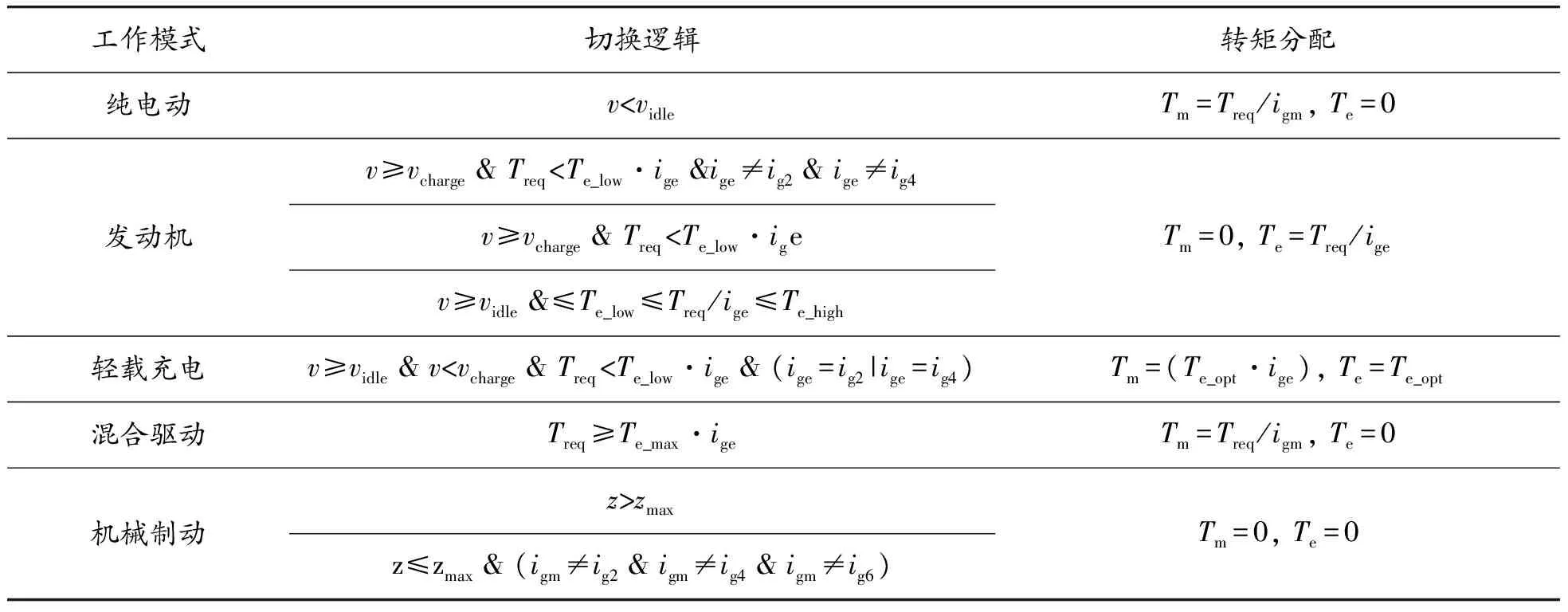
表6 CS阶段模式切换条件和转矩分配规则
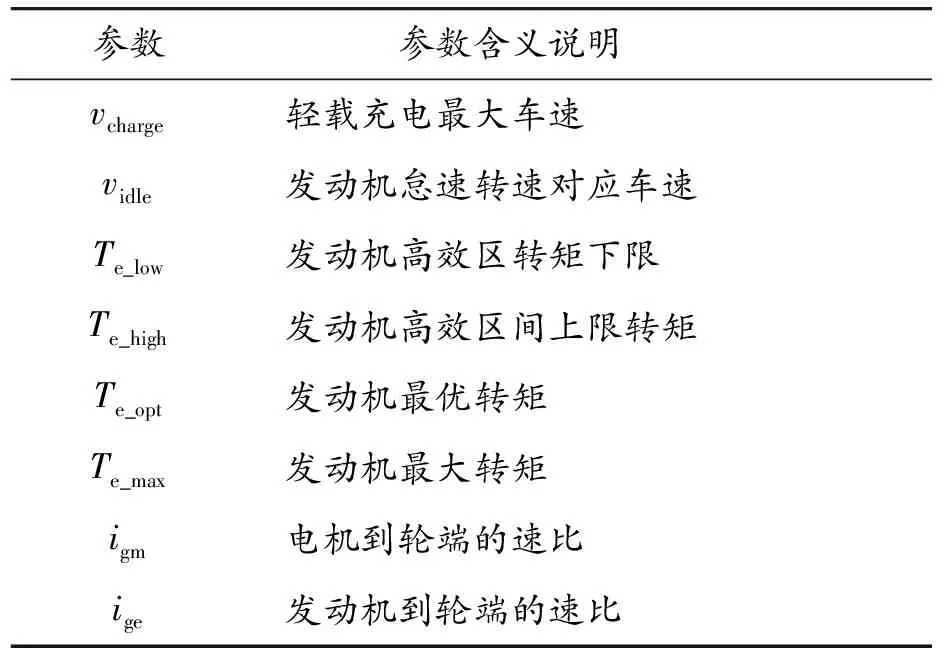
表7 表6中各参数含义说明
3 仿真分析
3.1 基于规则控制的仿真分析
为验证上述CD-CS策略的有效性,在Matlab/Simulink软件搭建整车模型,并且在上述策略下进行仿真实验。设置PHEV的电池初始值为0.8,CD与CS阶段切换的门限值为0.3。在4组WLTC工况下进行仿真分析,跟随效果如图11所示,可以看出,实际车速轨迹能够很好跟随WLTC工况,说明搭建的模型合理有效,PHEV的动力性满足要求。

图11 4组WLTC工况车速跟随效果曲线
图12为电池值随时间变化的曲线。当电池SOC值较高时,电量下降较快,此时汽车处于CD阶段,以耗电为主。当电池值下降到门限值附近时,进入CS阶段,此时以发动机为主要动力源,电池值在0.3~0.32维持,这符合规则下的变化趋势。
纯发动机模式与基于规则控制策略的油耗曲线如图13,可以看出,在基于规则的能量管理控制策略下,在CD阶段,发动机不参与驱动工作,进入CS阶段后,发动机作为主要动力源进行驱动,因此油耗逐渐上升,相比于纯发动机的工作模式,有效降低了发动机的燃油消耗率。由图13中的相关数据可知,在纯发动机工作模式下的油耗为5.362 L,而基于规则的控制策略下,油耗仅为3.758 L,油耗降低了29.92%,节油效果比较明显。

图12 SOC消耗曲线
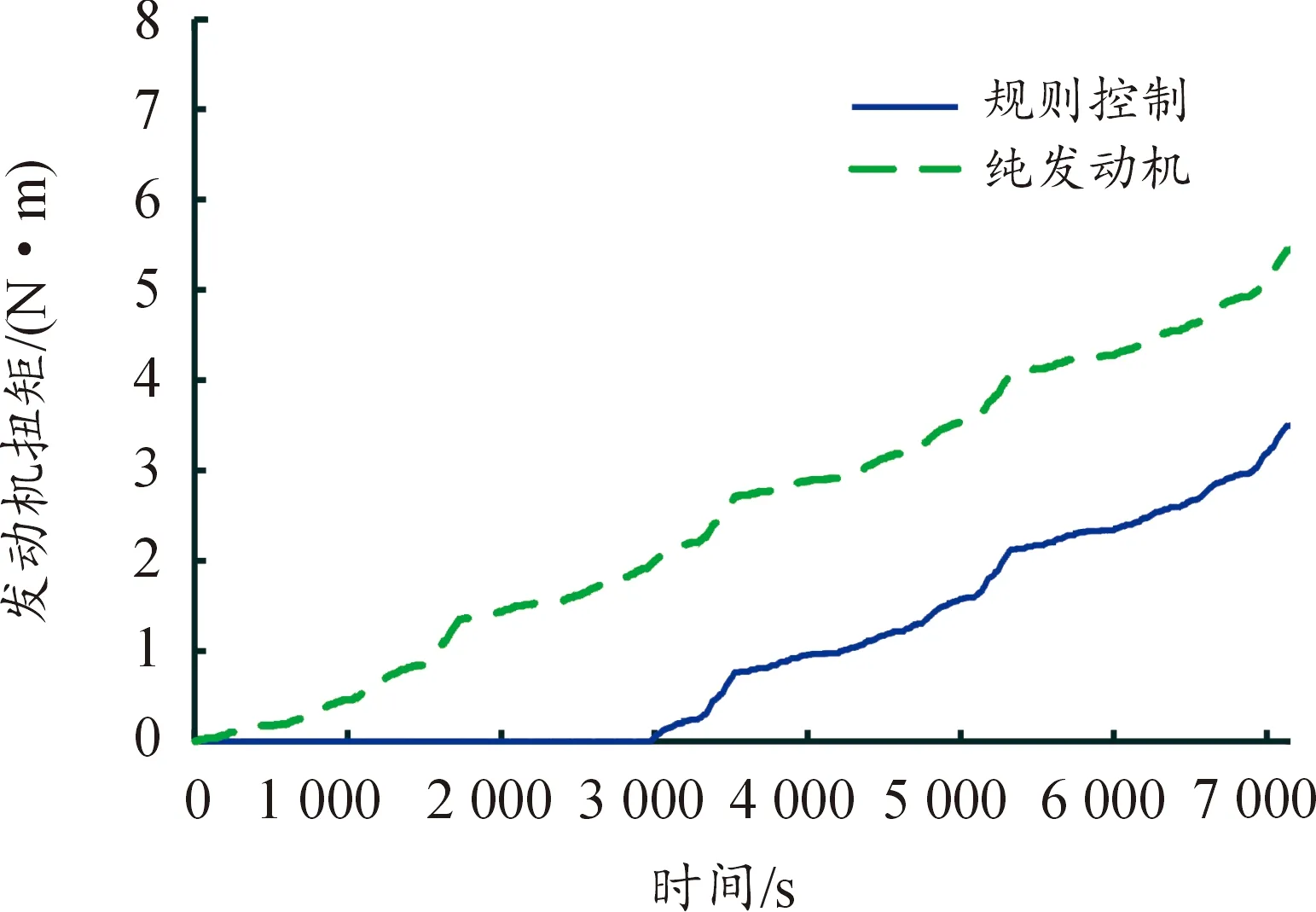
图13 发动机油耗曲线
图14、15为驱动电机和发动机的工作曲线,与电池值的消耗趋势一致,在CD阶段驱动电机在工作,发动机并未工作,因为此时整车需求转矩没有超过电机的峰值驱动转矩。在CS阶段发动机进行驱动的比例很明显,电机较少参与驱动工作,并在车辆减速时进行制动能量回收。
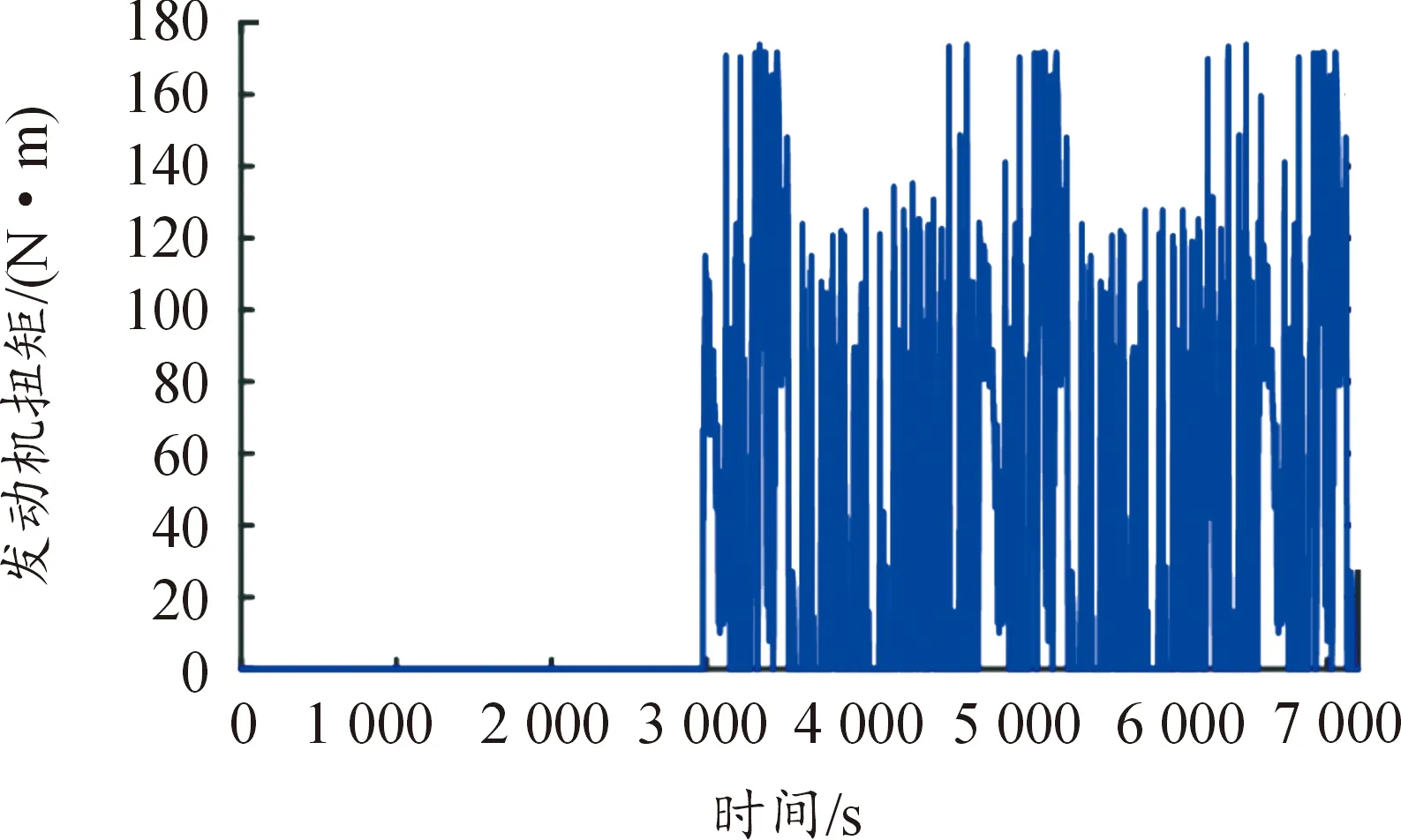
图14 发动机扭矩曲线

图15 电机扭矩曲线
图16为WLTC工况下发动机工况点的分布图,可以看出,纯发动机工作模式下的发动机工况点比较分散,并且有较多的点处于非经济性区域,而基于规则控制策略下的发动机工况点绝大部分位于油耗280以内的区域。由此也可以说明相比于纯发动机的工作模式,基于规则的控制策略能够有效使发动机保持在高效高经济性的区间内运行,证明本文建立的整车模型和制定的基于规则的能量管理策略是可行且有效的。
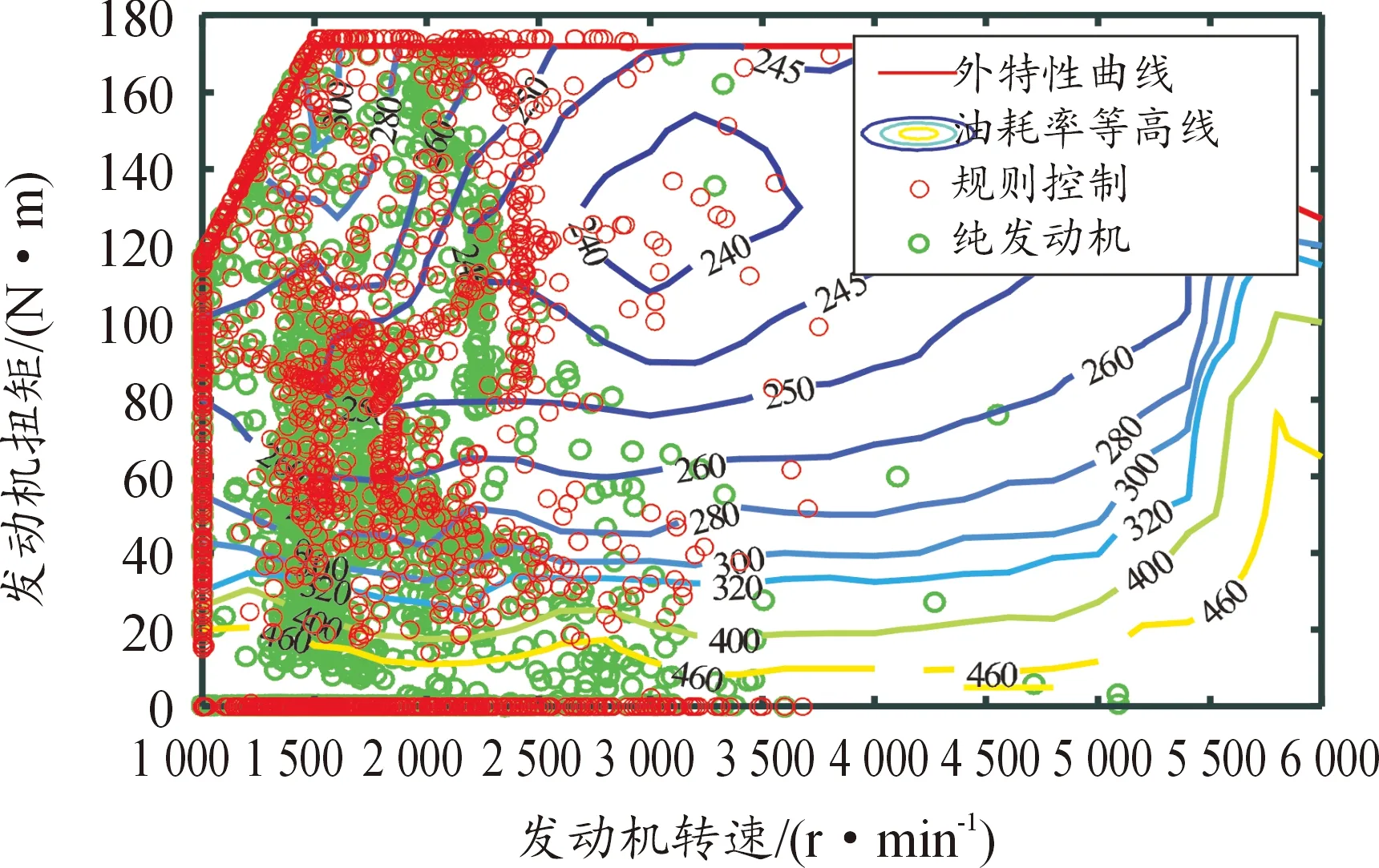
图16 WLTC工况下发动机工况点分布
3.2 不同工况下的仿真分析
为了进一步验证所设计的基于规则控制策略的正确性,确保在不同的工况下仍然有较好的效果,在世界轻型车测试工况(WLTC)、新欧洲行驶循环工况(WEDC)、美国城市道路循环工况(UDDS)及美国高速工况(HWFET)下分别进行仿真[15]。
设置PHEV各参数与表1中的相同,在不同行驶标准行驶工况下2种控制策略的百公里燃油消耗值如表8所示。
从表8可以看出,在WLTC、NEDC、UDDS及HWFET工况下,相比于纯发动机模式,基于规则控制的能量管理策略下的燃油节省均提升30%以上,有明显的节油效果,说明提出的基于规则的控制策略达到了预期目标。在UDDS工况下,燃油节省最为明显,高达63.3%,这是由于在城市道路中路况复杂,制动频繁且车速都保持在较低范围内,在这样的工况下,发动机处于高转速工作区间,而在本文制定的控制策略下,在该路段会优先考虑以P2.5电机作为驱动动力源,因此在该工况下,油耗节省最为明显。在HWFET的高速工况下,发动机一直保持运转在中高速,燃油利用率较高,发动机处于较优的工作区间,因此在该工况下发动机百公里燃油消耗最少。

表8 不同工况、不同控制策略下燃油消耗值
4 结论
1) 根据P2.5构型PHEV的结构特点,按照前向仿真模型的思路,在实验数据的支持下建立了PHEV关键部件等相关模型。
2) 制定基于规则策略下的切换逻辑和转矩分配规则,建立了CD-CS能量管理策略,并以4组WLTC工况为输入进行仿真试验。
3) 通过对PHEV在WLTC、NEDC、UDDS及HWFET工况下百公里的油耗仿真分析,对比了在不同的工况下基于规则的控制策略对于纯发动机模式的节油效果。
通过在不同的标准工况下运行,仿真结果表明,建立的整车模型和控制策略准确有效,能够确保发动机始终处于高效的工作区间运行。相比于纯发动机模式,制定的控制策略在不同的标准工况下,燃油节省均提升30%以上,最大可提升63.3%,能够有效提升发动机的燃油经济性,验证了基于规则控制策略的有效性。
猜你喜欢
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
山东冶金(2019年3期)2019-07-10
四川冶金(2018年1期)2018-09-25
消费导刊(2018年10期)2018-08-20
北京航空航天大学学报(2017年10期)2017-04-20
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
电机与控制应用(2015年3期)2015-03-01
航天返回与遥感(2014年4期)2014-07-31
无机化学学报(2014年4期)2014-02-28