
城市道路空洞的地面-管道雷达协同探测与联合成像
2023-03-10 13:12赖思聪陈俊宏岳云鹏陈志杰刘凤洲胡群芳
同济大学学报(自然科学版) 2023年2期
刘 海,赖思聪,陈俊宏,岳云鹏,陈志杰,刘凤洲,孟 旭,胡群芳
(1.广州大学 土木工程学院,广东 广州 510006;2.广东省滨海软土地区地下结构安全防护工程技术研究中心,广东 广州 510006;3.济南轨道交通集团有限公司,山东 济南 250000;4.同济大学 上海防灾救灾研究所,上海 200092;5.城市安全风险监测预警应急管理部重点实验室,上海 200092)
随着我国城市化进程不断加快,高密度的城市道路给维护工作带来了巨大挑战[1]。缺乏维护的城市道路不仅影响正常使用,严重时还会引发地面塌陷事故,造成人员伤亡和财产损失[2]。地下空洞是城市道路塌陷的主要内因,空洞在车辆荷载或自然条件影响下不断恶化,并导致上覆土体发生破坏及浅层地表失稳现象,严重危害人民的生命财产安全[3]。由于空洞具有隐蔽性强、不易探查等特点,亟需一种高效、快速的城市道路缺陷探测手段,在道路空洞形成的初期进行探测并进行维养,避免地面沉降、塌陷事故的产生[4]。
探地雷达(ground penetrating radar,GPR)作为一种无损、高效的浅地表地球物理探测技术,近年来在地下结构隐蔽缺陷无损检测中得到广泛应用[5]。GPR 通过发射天线对地下发射高频电磁波脉冲信号,电磁波在地下介质传播过程中遇到电性差异界面时发生反射或散射,反射波被接收天线接收后可根据雷达图像特征分析地下空洞的位置、大小及埋深[6-7]。但GPR对地下空洞检测的主要局限性在于,电磁波的物理特性决定了电磁波信号频率越低,穿透能力越强,可探测深度越深,但信号分辨率低;当信号频率越高时,衰减越快,穿透能力弱,可探测深度较浅,但信号分辨率高[8]。因此,在地面通过GPR对埋深较深的地下空洞进行探测时,难以兼顾其分辨率和探测深度。此外,大面积的城市道路检测会严重导致交通拥堵,增加了人力、物力成本。
研究表明,60%~80%的路面塌陷事故发生于地下管线附近[9],原因在于管线随着使用时间增长导致耐腐蚀能力下降,管道在水压作用下发生破损引发管线渗漏[10-11]。渗漏发生后,管道破损处的土体在水的侵蚀下逐渐软化并形成流失通道,土颗粒在水流冲刷作用下逐渐形成空洞[12],如图1 所示。进行管内探测能及时发现地下管道的破损点,但现有的管道机器人搭载摄像头进行视觉检测的方式无法对管道外部病害进行探测[13]。基于此,结合GPR的管道雷达(pipe penetrating radar,PPR)技术被提出,其目的是针对管道外部的脱空或空洞进行探测,通过控制搭载雷达天线的管道机器人进入城市雨污排水管道中从管道内部向外发射电磁波进行探测[14]。PPR 对管道外部空洞进行探测,由于距离探测目标更近,可有效兼顾探测深度与分辨率的要求[15],对空洞进行高精度探测,相较于在路面进行地下空洞的GPR 检测,有更高的检测效率[16]。此外,管道机器人前部装载的高清摄像头可以对管道内环境进行全方位表观病害检测,而雷达天线可以对管道外环境空洞进行探测,结合视觉检测与雷达检测的结果,能有效提高检测精度[17]。PPR 考虑了实际工程的需要,可探测由雨污排水管道破损泄露引起的管道周边空洞,以规避相关的地面塌陷事故。
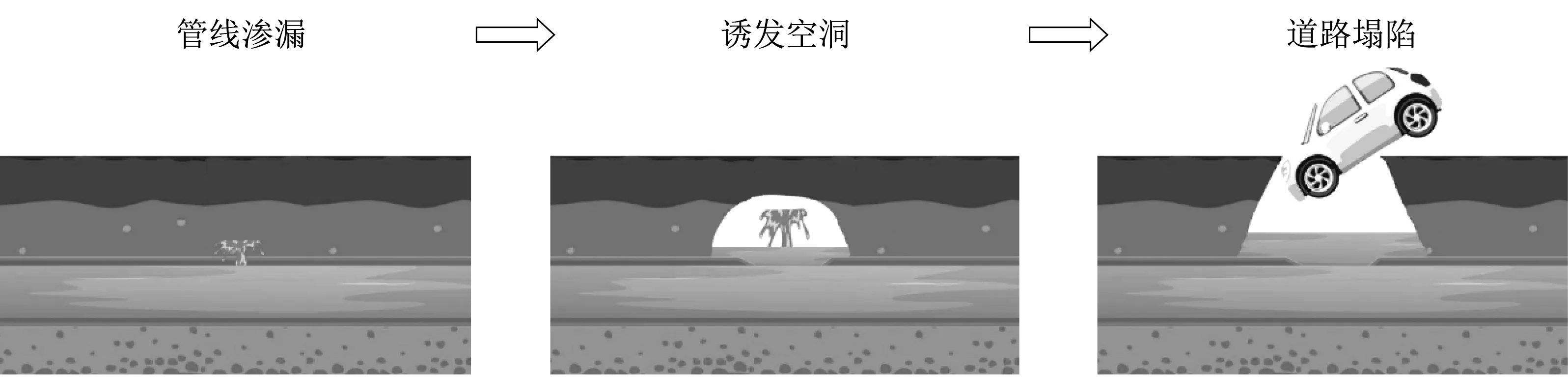
图1 管道渗漏诱发路面塌陷示意Fig.1 Illustration of road collapse caused by leakage of underground pipeline
综上,由于目前针对管道雷达对城市道路塌陷隐患探测的研究相对较少,且由于管道GPR相对依赖管道位置,在管线较少的城市路面,空洞探测覆盖率相对较低。基于此,本文针对城市道路空洞探测的问题,提出了一种地面-管道雷达协同探测技术,通过建立地下管道探测足尺试验平台,在管道上方埋设不同尺寸空洞开展协同探测试验;对雷达数据进行分析。并结合考虑天线方向图修正的背向投影(BP)算法,提出了一种地面-管道雷达联合成像技术,对管线渗漏产生的空洞进行高精度成像,为雷达图像解译提供参考。
1 地面-管道雷达协同探测技术
1.1 探地雷达(GPR)
GPR 系统由主机、收发天线以及显示器组成,其主机通过接收天线收到的返回信号将结果显示在显示器上。其主要原理是在地面通过发射天线发射高频电磁波,以脉冲的形式辐射到地下,经地下介质分层界面或目标体反射后返回地面,通过接收天线接收反射信号回波实现对地下目标的探测[18]。电磁波在介质中的传播特性由地下界面介质的电性差异决定,主要包括介质的介电常数与电导率,当相邻介质的介电常数差异越大,反射信号越强[19]。
当进行二维横向扫描时,GPR 天线沿着测线移动,经过相同距离时测距轮或测线盒上的编码器触发雷达主机记录雷达数据,所有数据以波形图的方式堆叠形成雷达剖面图[20]。通过分析雷达剖面图中反射信号的振幅、相位、双程走时等信息,可以分析地下介质或目标体的位置、几何形态以及物理性质。当天线收发距远小于目标体埋深时,可计算空洞的埋藏深度为
式中:h为空洞埋深;c为电磁波在真空中的传播速度;t为探地雷达信号的双程旅时;εr为地下介质的相对介电常数。对于双程旅时的计算,可以假设有一理想点散射体位于点(x,z),其中x表示天线扫描方向,z表示地下深度方向,发射与接收天线在坐标上的位置分别为xT和xR。在均匀介质中,从发射天线到地下任意成像点的双程走时为
式中:v为电磁波在地下介质中的传播速度;LTx是从发射天线至成像点P(x,z)的信号反射路径;LRx是从成像点P(x,z)至接收天线的信号反射路径;xT和xR分别为发射天线和接收天线的水平坐标。电磁波反射能量强弱主要由界面的反射系数R进行决定,其表达式如式(3)[21]:
目前淮山的加工产品主要有鲜切淮山、速冻淮山、淮山干制、淮山果蔬复合饮料、淮山保健酸奶、淮山焙烤食品、速溶淮山粉等。
式中:ε1为边界材料的介电常数;ε2为传播介质的介电常数。反射系数主要用于描述入射波与反射波相位与幅度的关系,当相位与发射波脉冲相同时反射系数为正,反之为负。
1.2 管道雷达(PPR)
PPR主要由管道无人车和GPR组成,针对管道四周土质疏松、土壤富水以及脱空等病害,通过改变管道无人车的探测角度对管道周边环境进行全空间探测,如图2 所示。PPR 沿管道轴向及环绕管道径向进行检测,可对管道外部区域进行三维切片分析。通过PPR的探测方式可完成对管道外部空间的高分辨率探测,以机器代替人工的方式提高了雷达的探测效率。PPR 还可根据探测需要,更换不同中心频率的雷达天线[22],由于距离探测目标更近,对电磁波的穿透深度要求减小,可以保证对管道外部3~5 m的范围内的空洞进行探测,提升管道周围目标体的识别能力。此外,管道周边检测可以解决大部分的路面塌陷问题,相较于地面雷达探测城市地下空洞,其投入产出比更高[9]。

图2 PPR沿管道径向与环向探测Fig.2 Circumferential and longitudinal cavity de⁃tection using PPR
但在地下目标探测中,PPR 只能对管线附近地下目标进行探测,其可探测空间范围较小且由于电磁波衰减导致只能对空洞下表面进行探测。为保证其探测有效探测范围,提出了一种地面-管线雷达联合探测方法,如图3 所示,可对城市道路地下目标进行探测,兼顾探测深度的同时提升雷达图像分辨率。得到地面-管道雷达探测数据后,可对探测数据进行融合并对其成像,帮助探测人员进行数据解译。

图3 地面-管道雷达联合探测示意Fig.3 Illustration of ground-pipeline penetrating radar joint detection technology
2 数据处理方法
2.1 背向投影(BP)成像算法
偏移成像能够获取地下结构和目标的几何形状,并对管道上部空间的隐蔽缺陷位置进行精确定位[23]。鉴于电磁波和地震波在地下传播机理的相似性,GPR 数据的偏移成像主要借鉴地震勘探领域常用的一些方法,本文结合地面-管道雷达探测数据,采用考虑天线辐射方向的BP算法,获取地下空洞的几何形状和位置。
BP 成像算法是一种根据射线理论建立的偏移方法,假设在均匀传播介质的条件下,雷达散射信号的相位与电磁波具有的行程时间成正比[24]。在进行BP成像时,需要确定成像区域的范围以及像素点的采样间隔,将成像空间的每个像素点视为理想点散射目标,该点散射目标在雷达剖面图中表现为一条绕射双曲线,通过叠加沿该双曲线的信号振幅计算该像素点的散射场。对于第i道接收时域信号,成像空间点(x,z)处的散射电场值为接收电场对应经过该点处散射信号振幅,最后将m道接收数据计算的成像空间点散射电场值叠加作为偏移后的结果[25]如式(4):
式中:Ei(ti)为式(4)中双程旅时ti处在第1 个天线位置记录的GPR信号的振幅。由于BP成像算法未考虑天线方向图的影响,忽略了天线辐射电磁波信号强度随入射和出射角度的变化,在成像结果中会出现伪影,影响数据解译的精度。
2.2 天线方向图修正

图4 发射天线在地下介质中的辐射方向Fig.4 Radiation patterns of an infinite line source lying on a homogeneous air-soil model
式中:fT,i和fR,i分别为发射机和接收机辐射模式对应的修正系数。采用无限线源半空间远场辐射方向图解析解来计算式(4)中的方向图修正系数,其表达式为[24]
2.3 地面-管道雷达联合成像算法
针对提出的地面-管道雷达协同探测技术,通过地面与管道的2 对天线同时对地下目标进行叠加,对地下道路空洞进行成像,如图5 所示。对地面与管道雷达各个像素点同时偏移进行相关计算,由此得到的成像空间像素点(x,z)的叠加偏移结果为

图5 地面-管道雷达联合BP成像方法Fig.5 Illustration of ground-pipeline penetrating radar joint imaging method
式中:为联合偏移成像数据为地面雷达偏移成像数据;为管道雷达偏移成像数据。通过地面-管道雷达联合探测的数据可对城市道路地下目标进行高精度成像,在提升雷达探测地下目标深度的同时提高成像分辨率。
3 模型试验
3.1 试验平台建立
为了研究GPR 与PPR 对地下空洞的雷达成像效果,搭建了含有不同尺寸预设空洞/含水空洞的地下目标探测试验平台并开展了地面-管道雷达联合探测试验。如图6 所示,搭建的试验平台由两环地铁隧道标准块管片(隧道管片用于其他用途)以及三面砖墙组成,底部平行埋设了内径为40 cm 的PVC与混凝土管道各1条。混凝土管外径为50 cm,两管道间距为40 cm,管线顶部埋深约1 m所示。管线上方预先埋设5 个缺陷体用以模拟道路内部空洞,由于泡沫体的介电特性与空气相似,采用立方体泡沫块模拟道路内部空洞。其中1#、2#、3#为不同规格的立方体泡沫块,4#、5#为立方体密闭亚克力水箱,用于模拟含水空洞,如表1所示。其中3#搭载在混凝土管的中部上方,距离PVC 管顶部10 cm。在平台内部填充40 目标准石英砂,用以模拟道路土层,试验室测得石英砂介电常数为3。

表1 试验平台内部空洞尺寸Tab.1 Specifications of cavities in established de⁃tection platform

图6 地下目标探测试验平台及空洞布置Fig.6 Underground object detection platform and its cavities sketch map
3.2 数据采集过程
探测试验共布置4 条测线,每条测线长度为5 m,其中2 条测线分别布置于PVC 与混凝土管道内。对于PPR 探测,需确保雷达天线与管道顶部紧密接触,通过搭载便携式平台实现管道的径向测量。其余2 条测线布置于沙面且分别平行于管道测线,保持GPR前进方向与PPR一致,如图7所示。天线采用测距轮触发的方式进行数据采集,道间距设置为10 mm。为兼顾GPR 探测深度与成像精度的需求,选取中心频率为900 MHz 的天线,时窗设置为60 ns,采样点设置为2 048个。

图7 GPR与PPR探测过程示意Fig.7 Measurement of underground cavities from established detection platform using GPR and PPR
4 试验结果分析
4.1 探测结果分析
采集数据后,为提高信噪比和突出目标反射,需要对原始雷达数据进行预处理。主要处理步骤包括去除直流分量、背景去除、带通滤波、增益处理和零时校正。
首先对地面雷达探测2 条测线进行分析解释,依次采集30 cm 空洞、80 cm 空洞以及30 cm 含水空洞的雷达信号,对实测数据进行预处理后的PVC管与混凝土管上方地面雷达图像如图8a、8b 所示。3个预设空洞的反射信号均用线框标出,2个管道上方的雷达剖面图均存在相同位置的异常体反射,可以分辨PVC管位于3 ns处的80 cm空洞反射以及远端9 ns 的30 cm 空洞与含水空洞反射。含水空洞相较于空气空洞呈现出更强的反射,且反射波会发生相位反转的现象,原因在于,水的介电常数为81,远大于试验平台内部填充石英砂的介电常数3,通过式(3)计算可知R小于零,此时反射波的相位相对于首波发生180°翻转[21]。此外,混凝土管底部测线可以观测到管道内部钢筋,由于钢筋直径小于波长,钢筋在雷达图像中呈双曲线形态。
对PPR采集的原始数据进行上述相同的预处理步骤后,分析雷达图像可知,相较于地面雷达采集的数据,PPR采集的数据有更高的分辨率。在PVC管内探测时,2 ns 处可观察到管道上方空洞底部的强反射信号,3 ns 处可观察到80 cm 空洞的底部反射,15 ns 处可观察到沙面与空气的分界面,如图8c 所示;在混凝土管内探测时,能在2 ns 处观察到3个空洞的反射信号,且由于混凝土管内部设有单层钢筋网,能明显识别钢筋网形成的双曲线反射信号。因为密集的钢筋水平间距(50 cm)会造成电磁波的多次散射,对雷达信号产生屏蔽效应,影响空洞的识别(图8d)。然而,仅从预处理后的图像难以直观且准确地得到道路内部空洞的空间位置及尺寸信息。
4.2 BP成像结果分析
首先通过引入天线方向图修正的BP 算法对图8a、8b 的地面雷达数据进行偏移成像,结果如图9a、9 b所示。可以发现,本文采用的偏移成像算法能够对空洞/含水空洞产生的绕射波进行归位,将能量完全聚焦到空洞所在的准确位置,还原空洞的真实形状和尺寸,且混凝土管上方的雷达图像在偏移重构后,钢筋的微弱的反射信号也被聚焦。但因为电磁波的频率越高,在介质中传播的衰减速度越快[26],使空洞底部信号未被完全探测,无法准确分辨空洞面积。
图9c、9d 为管道GPR 数据(图8c、8d)的偏移成像结果,可以发现由于管道GPR 天线距离空洞更近,空洞能量被聚焦地更为明显,在PVC 管和混凝土管道内部均可以对空洞进行准确成像,并还原空洞真实宽度。在图9b中,钢筋的反射信号也被聚焦地更加明显。在雷达剖面0.1 m与0.9 m处,管线的界面以及沙坑顶部的界面也被清晰成像。但由于空洞底部与管线的雷达信号产生叠加,使空洞底部信号未被完全聚焦,仍无法完全准确分辨空洞面积。

图9 GPR与PPR空洞探测BP成像结果对比Fig.9 Comparisons of cavities above PVC and concrete pipe migrated by BP method
4.3 联合成像结果分析
采用本文提出的地面-管道雷达联合成像算法,将地面与管道的雷达数据结合进行偏移成像,如图10,由于PPR从管道向地面进行探测,联合成像过程对PPR成像数据进行翻转。从图10可以看出,无论是在PVC管还是混凝土管的上方,空洞顶部和底部的反射均被清晰成像,且空洞位置与尺寸均与实际埋设情况相符。在图10a 中,3#空洞底部与PVC 管道顶部的10 cm 间距可被清晰观测,证明所提出的联合成像方法具有较高的精确度,可以分辨出空洞与地下管线的垂直距离。此外,混凝土管顶部的钢筋在图10b中被清晰成像。

图10 地面-管道雷达数据联合成像结果Fig.10 Results of cavities migrated by proposed joint imaging method
地面-管道雷达联合成像技术的目的是获得道路内部空洞的高分辨率重构图像,需要对雷达重构图像的成像精度进行评估。本文选用对比度特征评价指标进行评估,对比值越大,证明图像重构精度越高,其表达式[23]为
式中:um、un分别为图像像素点的行数和列数;u(xi,zj)为图像中的某个像素点。
对于不同雷达数据的重构图像,采用式(8)进行对比度特征值C(k)的计算,并针对BP 与联合探测成像结果进行对比,对应最大对比特征量值的图像被认为有最好的偏移效果,如表2所示。结果表明,相较于地面雷达的成像结果,PPR 具有较高的探测精度及分辨率。在PVC 管以及混凝土管的探测试验中,联合成像的对比度特征值均大于传统的BP成像算法,证明地面-管道雷达联合成像可以提升图像的精度,并准确提供地下目标位置及面积信息。

表2 不同成像方法的对比度特征值Tab.2 Contrast metric results of different imaging methods
5 结论
针对地下管线破损渗漏引起的管道周边空洞工程探测问题,提出了地面-管道协同探测技术,通过设计地下目标探测试验平台,开展地面与管道雷达对管线附近空洞的探测试验,并对比地面与管道雷达空洞/含水空洞图像的差异。同时,针对考虑天线方向图修正的BP 成像算法,提出地面-管道雷达联合成像方法。试验结果表明,相较于传统的地面雷达,PPR 探测管道附近空洞有更高分辨率。提出的地面-管道联合成像方法比传统成像方法可更直观地观测到空洞的顶部与底部界面以及混凝土管内部钢筋,并能够准确表征管线顶部空洞位置及面积。
通过足尺模型试验证明地面-管道协同探测技术可以准确判断管线外环境空洞的位置,提出的联合成像算法可以估计空洞/含水空洞的面积大小。需要指出的是,试验中的背景介质为相对均匀的石英砂,因此联合成像的空洞图像特征较为明显。在环境相对复杂的城市道路,考虑到背景介质不均匀,需要对所提的联合成像算法进行进一步改进,以确保更为有效的探测和成像。
作者贡献声明:
刘 海:研究方向确定,论文修改。
赖思聪:试验开展,数据采集,论文撰写。
陈俊宏:试验开展,数据采集,数据分析。
岳云鹏:试验设计,数据分析。
陈志杰:数据分析。
刘凤洲:试验设计,数据分析。
孟 旭:数据分析,论文修改。
胡群芳:技术方案设计与数据分析,论文修改。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
上海金属(2021年2期)2021-04-07
山东冶金(2019年2期)2019-05-11
电子制作(2017年10期)2017-04-18
电子制作(2017年9期)2017-04-17
故事作文·高年级(2017年2期)2017-03-01
新闻传播(2015年20期)2015-07-18
中国铁道科学(2014年1期)2014-06-21
中医研究(2014年5期)2014-03-11
