
微电网直流输电MMC环流抑制研究
2023-03-04 09:56阳同光杨轩园
可再生能源 2023年2期
阳同光,杨轩园
(1.湖南城市学院 机械与电气工程学院,湖南 益阳 413000;2.智慧城市能源感知与边缘计算湖南省重点实验室,湖南 益阳 413000;3.南华大学 电气工程学院,湖南 衡阳 421001)
0 引言
可再生能源存在间歇性、随机性等特点,导致利用率较低[1]~[4]。目前,我国能源与负荷中心分布不均,为了弥补可再生能源并网的不足,提高电网运行稳定性与可靠性,须搭配合理的电能送出与传输方式[5]~[8]。基于MMC的HVDC技术具有简单的模块化设计、可扩展到各种功率和电压水平、低开关频率、易于实现电容电压平衡控制、易于实现冗余、分布式电容储能以及几乎理想的正弦波输出 波 形 等 优 点[9]~[14]。
经过多年的发展,国内外学者在MMC的研究方面取得了很大的进展,MMC-HVDC已经在实际工程中得到了广泛的应用[15]~[19]。国内、外典型MMC-HVDC工程如表1所示。

表1 国内外典型MMC-HVDC工程Table1 Typical MMC-HVDC projects at home and abroad
目前,MMC-HVDC仍面临环流问题。由于MMC独特的工作模式及构造,在相与相以及相与直流侧形成不平衡压降,进而形成回路电流,该回路电流统称为环流,环流中存在的谐波分量,会增加桥臂电流的峰值/有效值,干扰电力设备的安全运作[20],[21]。本文阐明了MMC环流抑制的必要性,系统总结了国内外环流抑制方法的研究现状,将间接环流抑制方法与直接环流抑制方法进行分类整理和综合性能比较,同时讨论了环流谐波在降低MMC电容电压波动方面的应用。最后展望了环流抑制方法的未来发展方向,指出了相关研究思路。
1 MMC组成结构
MMC平台的硬件主要包括功率开关器件、开关器件驱动系统、桥臂电抗器以及电压电流传感器,MMC平台结构如图1所示。
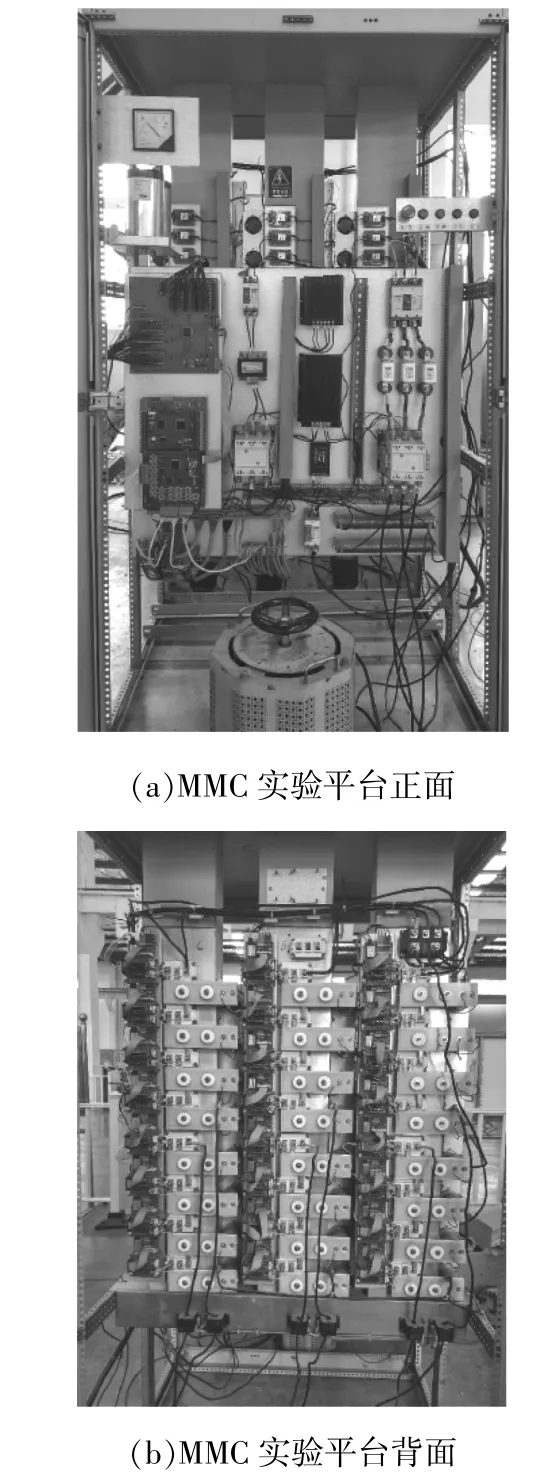
图1 MMC实验平台Fig.1 Experimental platform of the MMC
MMC三相拓扑结构如图2所示。
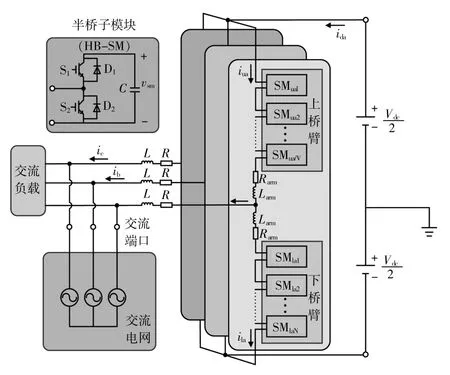
图2 MMC三相拓扑结构Fig.2 Topology structure of the MMC
由图2可知,两个桥臂构成一相,上桥臂和下桥臂通过桥臂电感和电阻串联。桥臂由相同子模块(SM)串联组成。SM可以配置成半桥SM(HBSM)、全 桥SM(FB-SM)、飞 电 容SM(FC-SM)、二极 管 钳 制SM(DC-SM)、T-SM1(TSM1)或TS-SM(TSM2)[22]。因 为HB-SM结 构 简 单,损 失 最 低,而且容易控制,因此在MMC中应用广泛。每个HBSM由两个半导体开关、两个反并联二极管以及一个用于储能的直流电容组成。直流电容电压vsm根据子模块的投入与切除,其输出电压分别为vsm和0。桥臂电感用于限制通过桥臂的环流和故障电 流。Larm,Rarm分 别 为 桥 臂 电 感 和 电 阻;iuj,ilj分 别为通过上、下臂的电流,下标j代表abc三相;ij为交流侧输出电流;uj为交流电网的三相电压。
2 环流产生机理
由于MMC的对称性,在不计桥臂电感前提下,环流机理可以在单相上进行分析。单相MMC的等效电路如图3所示。其中:两个桥臂的SM被视 为 等 效 电 压 源;vuj,vlj为 交 流 侧 电 流 电 压;icirc为换流器环流。

图3 MMC单相等效图Fig.3 Single-phase equivalence diagram of the MMC
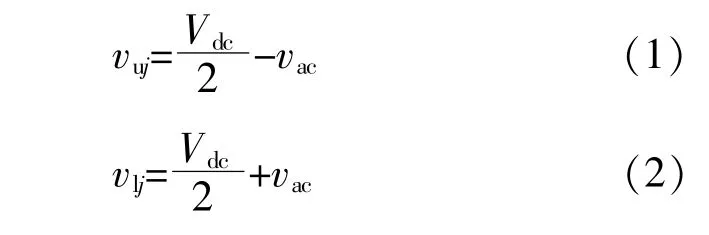
本文以上、下桥臂功率进行分析,vuj,vlj可表示为
定义调制比m为

由(3)式 可 得:

vuj,vlj可 进 一 步 化 简 为
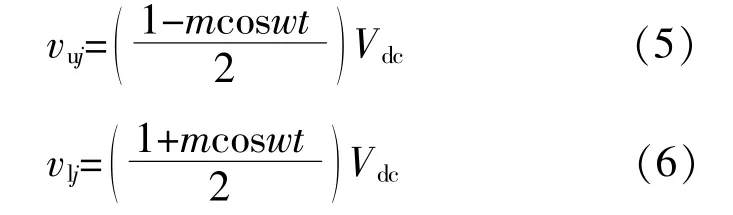
式中:Vdc为直流电容电压。
由 图3可 得iac,ilj与iuj分 别 为

式中:Iac为桥臂电流。
联 立 式(5),(8),可 得 上 桥 臂 功 率 为

联 立 式(6),(9)可 得 下 桥 臂 功 率 为

因此,单相功率可表示为

由于稳态时桥臂中不含有直流功率成分,因此


由式(14)可得到每相功率有2次谐波成分,所以每相总电压也存在二次谐波成分,电压作用于桥臂电感,激发环流的二次分量,由此可得:

通过以上分析,环流由直流分量与二次谐波分量组成。文献[23]~[26]指出,环流仅由直流成分以及偶次谐波组成,而偶次谐波中二次谐波比例最大。综上,环流由直流分量与偶次谐波分量组成,而偶次谐波分量中主要为二次谐波分量。
3 环流抑制
MMC中的不平衡压降是产生环流的直接原因,通过控制直流侧电压与桥臂等效输出电压之间的差值,即可以调节环流中的谐波分量[27]。由图3得到环流等效图,如图4所示。

图4 环流等效图Fig.4 Circulation equivalence diagram
图中ej为上下桥臂等效输出电压。
由图4可得环流抑制原理图,如图5所示。

图5 环流抑制原理图Fig.5 Circulation suppression schematic
图中:ux为直流侧电压与桥臂等效输出电压之间的值;为环流给定值,通常代表环流中的直流分量。
当实际环流小于给定值时,通过调节ux的极性为正,增大环流;当实际环流大于给定值时,通过调节ux的极性为负,减小环流。
ux的极性可以通过控制桥臂中子模块投切来改变[28],[29],而现有的环流抑制方法可以分为间接环流抑制和直接环流抑制,如图6所示。

图6 环流抑制方法分类Fig.6 Classification of circulation suppression methods
间接环流抑制方法主要分为比例积分控制、比例谐振控制、重复控制,通过输出环流修正量,改变上下桥臂输出电压调制波,其结构见图7。图中:uzLj为间接环流抑制输出的桥臂电压修正量;与分别为交流侧电流参考值与MMC交流侧等效输出电压参考值;与分别为上、下桥臂输出电压参考值。
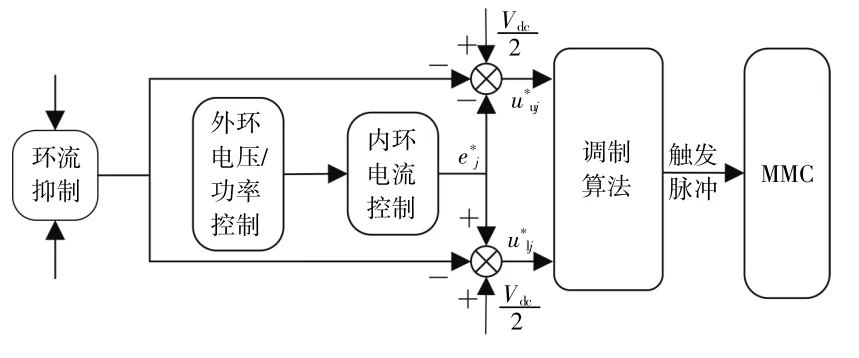
图7 间接环流抑制结构Fig.7 Block diagram of indirect circulation suppression structure
直接控制方法通过控制算法直接改变投入模块的数量而不改变调制波[30],[31],不需要进行abc/dq变换并能减少控制器设计,主要分为调制方法与模型预测控制,其结构框图如图8所示。

图8 直接环流抑制方法结构Fig.8 Block diagram of the structure of the direct circulation suppression method
3.1 间接环流抑制
3.1.1 比 例 积 分 控 制(Proportional Integral Control,PI)
传统环流抑制结构如图9所示。

图9 传统环流抑制结构Fig.9 Block diagram of conventional circulating current suppression structure
通过abc/dq转换得到环流二次谐波的d轴和q轴分量izd与izq,使用PI控制器跟踪二次谐波设定值izdref与izqref(通常设定为0),达到环流抑制的效果[32]。该方法存在没有考虑其他次谐波的抑制、正负序分离给控制器带来延迟以及电网频率的变化等问题。文献[33]在PI控制中加入自适应控制,以在线调整参数的形式实现了参数自调,提高了环流抑制的快速性和稳定性。文献[34],[35]在PI控制器基础上新增矢量比例积分(Vector Integral Control,VIC)控 制 器 抑 制 三 相 不平衡引起的零序分量。
3.1.2 谐 振 控 制(Proportional Resonance Control,PR)
PI控制没有涉及到交流指令跟踪的问题,同时存在解耦方面的困难[36]。文献[37]将PR控制运用于MMC环流谐波抑制,能实现对交流指令的跟踪。文献[38]~[40]通过一个或者多个PR控制器可以实现环流中特定次谐波的抑制,如图10所示。

图10 多次谐波抑制Fig.10 Block diagram of multi-harmonic circulating current suppression
PR控制器只能实现特定频率下的无静差控制,跟踪效果难以达到需求,所以谐振控制中大多采用准比例控制器 (Quasi-Resonance Control,QPR)。文献[41]将环流分为水平分量与垂直分量,通过设置恰当的QPR控制器参数使稳态性能和环流抑制性能达到最大化。文献[42]在此基础上,增加了桥臂电流比例负反馈,增大了桥臂电阻,改善了系统的稳态性能。为弥补在电网偏移情况下的谐波抑制能力不足,文献[43]调整了QPR控制器系数的确定规则,对产生环流的扰动设置前馈补偿,提高系统稳定性。有学者通过增加直流分量提取环节来提高控制效果,文献[44],[45]分别使用陷波器和二阶广义积分提取环流谐波分量,结合QPR控制器实现环流抑制。电网电压的不对称会导致交流侧出现零序分量,可能造成过流等情 况[46]~[50]。文 献[51],[52]利 用 多 个QPR调 节 器,实现电网电压不对称情况下的多次谐波抑制,然而难以对零序分量进行控制。文献[46]使用准PR控制器来抑制零序电流,但是整体结构复杂。文献[47],[53]在准PR控制器上增加比例积分项,构成PIR控制器,提高准PR控制器的响应速度,同时采用了4个PIR控制器同时消除正序、负序和零序二次谐波环流。但它不能实现理想的0dB振幅响应和谐振频率下的0°相位响应。
3.1.3 重 复 控 制(Repeat Control,RC)
PR控制器能实现环流的无静差控制,但面对不平衡情况需增设多个谐波抑制环节[54],[55]。重复控制器能消除信号中的周期性扰动[56],[57],而在系统运作的第一个基波周期,RC因延迟环节不能达到谐波抑制效果。文献[58]考虑PI控制器的优点,提出了一种PI+RC并联的控制器。该方法能实现理想的环流谐波抑制效果,但需要寻找各参数之间的最优关系。文献[59]使用了一种PI控制与重复控制串联的形式,如图11所示。

图11 重复控制结构Fig.11 Block diagram of repetitive control structures
文献[60]中采用了P+RC形式的环流控制,用以减弱重复控制积分效果,提高环流抑制效果。文献[61]在正、负序双同步坐标系下设计两组PI+RC控制,能在三相对称及不对称系统中达到良好的环流抑制效果,但控制器的设计复杂。
3.1.4 对比分析
对间接环流抑制方法进行对比分析,如表2所示。
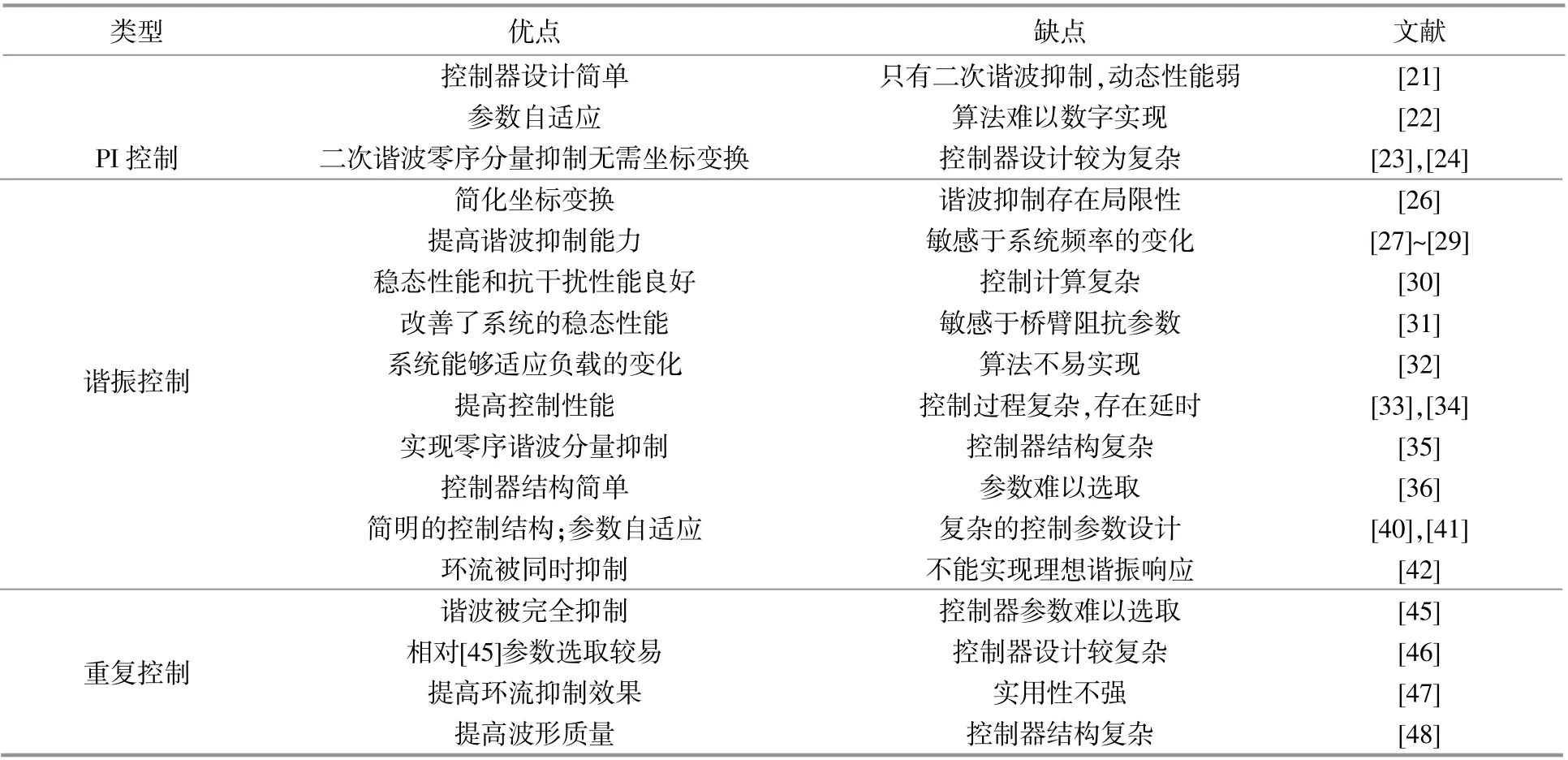
表2 间接环流抑制方法对比Table2 Comparison of indirect circulation suppression methods
综合上述分析,MMC间接环流抑制方法主要在谐波抑制能力上进行优化。为了保持MMC在不对称运行/电网偏移情况下的谐波抑制性能,需结合多个控制器,但会导致控制结构复杂、参数难以选取等问题。重复控制器参数选取不易,因此可以考虑将控制算法与重复控制器结合,降低参数整定的困难。
3.2 直接环流抑制方法
3.2.1 调制方法
MMC本质是通过控制开关状态获得桥臂或交流侧的期望电压。而开关状态的获取,可以通过优化调制方法选择最优的开关状态,在不增加额外控制器情况下,实现环流最优抑制[62]。文献[63]在文献[30]基础上,引入最大排序电容电压波动系数和双保持系数,降低了开关频率。文献[64]以输出理想的桥臂电压为控制目标,将子模块电容电压进行升序排列,根据电流方向确定子模块求和的顺序,当求和值与桥臂输出的理想电压最接近时,投入求和的子模块,减少子模块投切次数。
3.2.2 模 型 预 测 控 制 (Model Predictive Control,MPC)
MPC不需附加调制,能实现MMC各电气量综合控制,与传统的线性控制器相比,提供更快速的控制,具有更高的精度和稳定性,同时具备提前预测能力[65]。MMC模型预测综合控制系统框图如图12所示。

图12 MMC模型预测系统Fig.12 Block diagram of MMC circulation suppression model prediction system
图 中:ij(k+1)和icirc(k+1)分 别 为tk+1时 刻MMC交流侧电流与桥臂内部环流的预测值;(k+1)与(k+1)分 别 为 对 应 给 定 值;iuj(k)与ilj(k)分 别 为tk时刻的上、下桥臂电流。
利用MMC各电气量离散数学模型,预测MMC子模块所有可能的开关状态,最后将得到的多目标控制的最优开关状态应用于MMC[66],[67]。文献[68]为减少模型预测计算量,在N+1种模块数的分配情况下完成预测计算,但没有对投入模块数波动范围在N附近进行分析。文献[69]在MPC基础上,利用子模块电容电压排序来降低子模块电容电压的波动,进一步提高环流的抑制效果。但该方法是在子模块电容电压波动保持不变的情况下,因此实用性不强。文献[70]结合重复控制器与MPC的优势提高参考信号追踪能力的同时具备较好的动态性能,但参数的选取通过实践经验结合模糊自适应算法得出,只能针对特有模型。
上述MPC无法得知在下一个采样时刻是否能继续保持最优环流抑制效果[71]。文献[72]提出了一种多步MPC环流抑制方法,基本原理见图13。

图13 多步模型预测原理Fig.13 Flow chart of model prediction algorithm
图中:x(k)为MMC被控量x在ik时刻的采样值;虚线②表示x的参考曲线x*;实线①表示所有开关组合下x的预测值;虚线③表示最佳开关组合下x的输出值;实线④表示在常规预测的基础上利用MMC所有可能的开关状态对此刻x值进行预测。
由于MPC的计算量随着预测周期的延长而增 加,因 此 文 献[73]~[76]在tk+1,tk+2预 测 时 刻 根 据 不同最优预测状态确定规则,选取ik采样时刻的最优开关状态。上述几种多步模型预测方法的计算量对比如表3所示。N为MMC每一采样时刻存在的有效开关组合数。

表3 计算量对比Table3 Comparison of the number of predictions
3.2.3 对比分析
对直接环流抑制方法进行对比分析,如表4所示。

表4 直接环流抑制方法对比Table4 Comparison of direct circulation suppression methods
综合上述分析,调制算法不需要设计复杂的控制环节,但需要子模块开关器件频繁的投切,相应的导致较高开关器件频率。MPC一方面未考虑开关通断的延迟、权重系数的选取、权重系数与输出状态对应关系等问题;另一方面随MMC输出电平数的增加,开关函数组合呈几何倍数增加,使得MPC计算量大大增加。
3.3 环流利用
理想情况下,环流抑制的目标是使得环流值趋近于直流分量,为减小子模块电容电压波动,降低MMC不平衡压降,也可考虑向系统注入谐波环流分量。环流注入与环流抑制不同之处在于环流注入设定环流给定值是以降低子模块电容电压波 动 为 控 制 目 标[77]。结 合 式(10),(13)可 以 看 出,桥臂功率不含直流分量,包含基频分量与二次谐波波动分量,这些功率波动引起子模块电容电压波动。文献[78]通过适当选择二次环流的幅值和相角,可以消去功率中的二倍频波动分量,而二次环流需要通过离线计算,获取交流电流的幅值、相角。二次环流注入控制结构如图14所示。

图14 二次环流注入结构Fig.14 Secondary circulation injection structure diagram
实际应用时需要在线查表确定注入量的幅值和相位,文献[79]通过在线查表计算获取二次谐波幅值和相位。文献[80]为了实现更优的电压波动抑制能力,在环流给定值计算环节中增加4次谐波注入。但上述两类方法需要获取MMC输出电压以及电流幅值与相位,进而需复杂的查表计算,难以数字实现。环流注入的优化主要在于环流量参考值确定方法,文献[81]根据调制波信号和瞬时交流电流之间的关系确定谐波注入值,但该方法缺乏分析子模块波动抑制效果,同时未考虑瞬时交流电流造成的影响。为了实现更简单、准确的谐波注入,文献[82]根据上下桥臂能量平衡计算得到环流给定值,可以降低数字控制难度,但该方法需满足流经各电容上的电流一致的条件,实际情况中难以实现。
对环流注入方法进行对比分析如表5所示。

表5 环流注入方法对比Table5 Comparison of circulation injection methods
综上分析,一方面环流注入参考值的计算存在公式推导复杂、计算量大等问题,可以考虑结合人工神经网络等方法简化计算步骤;另一方面,环流注入使桥臂中始终存在谐波分量并造成系统额外损失,可以考虑在不同工况下选择一种最优环流注入方法,减少系统损耗。
4 结论与展望
模块化多电平换流器(MMC)环流的有效抑制,对提高电能传输质量和系统稳定性具有重要意义。经分析可知:MMC间接环流抑制方法通过不同控制器组合提高环流抑制性能;MMC直接环流抑制方法的研究主要集中于优化调制方法以及简化MPC计算,MPC在环流抑制方面有其独特的优势,因此在MMC环流抑制中有广阔的运用前景。环流虽然会对系统造成负面影响,但在降低子模块波动上能利用环流达到较好的效果,对环流的合理利用以及调配是目前MMC的研究热点。未来需要深入探索的工作可以从以下几个方面展开:①为了保持控制器对系统的谐波抑制性能,同时具备根据基波频率变化进行调整的能力,研究频率自适应算法在环流抑制中的应用具有重要意义;②MPC未考虑MMC子模块投切导致的开关延迟的影响、未找出权重系数与输出状态对应关系以及MMC开关函数组合随着子模块数目的增加而几何倍数增加,未来应加强MMC环流抑制中MPC优化方法研究;③模型预测以及环流注入等方法需要对MMC电气量进行大量的查表计算,同时电平数较多时,测量子模块电容电压需要大量的电压传感器,其数字实现相对困难。
猜你喜欢
粮食问题研究(2022年2期)2022-04-25
中风与神经疾病杂志(2021年10期)2021-01-03
电子制作(2018年18期)2018-11-14
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
中国实用神经疾病杂志(2018年9期)2018-05-25
电力系统及其自动化学报(2016年5期)2016-12-01
工矿自动化(2016年10期)2016-10-28
儿童故事画报·智力大王(2016年6期)2016-09-14
电气化铁道(2016年6期)2016-05-17
