
组合激光雷达系统在输电线路测量中的应用
2023-03-03 09:10:38林宇龙李冰白征东程宇航
电测与仪表 2023年2期
林宇龙,李冰,白征东,程宇航
(1.国网冀北电力有限公司, 北京 100053; 2.清华大学 土木工程系, 北京 100084)
0 引 言
随着我国国民经济快速发展,电力网络规模不断扩大,高效、有序地对电力网络进行管理并保证其正常运行成为电力系统建设中的重要问题[1]。输电线路作为电力网络的主要组成部分,可以将电能输送至全国各地,发挥着至关重要的作用[2-3]。但是,传统的人工测量输电线路的方法已经无法匹配电力网络建设的速度,并且对于输电线路途经区域地形复杂、环境恶劣的情况,传统人工测量方法的效率和精度都较低[4-6]。
机载激光雷达系统以无人机为载体,以激光脉冲为测量媒介,可以同时采集测量区域的高精度点云数据和高分辨率图像,具有测量速度快、精度高、全数字特征等特点,在输电线路测量中得到了广泛应用[7-11]。其中,点云数据是激光雷达的基本输出,通用的文件格式是三维坐标文件,包含每一个点的三维坐标值,除此之外可能含有颜色信息或者反射强度信息。使用激光雷达测量电塔、输电线、通道和相间间隔棒,可以建立输电线、电塔的电子台账,对电力网络的安全运行具有实际意义[12]。
然而,由于机载飞行平台所搭载的激光雷达重量所限,其扫描分辨率一般较低,所以机载激光雷达系统采集到的点云数据中点与点的间隔较大,无法得到电塔的精细点云数据。鉴于此,文中提出一种机载激光雷达系统与地面激光扫描仪协同工作的输电线路测量方案,可以采集输电线路的精细点云数据,实现输电线路走廊中危险点的检测[13]以及电力塔的倾斜度与变形监测[14],图1给出了组合激光雷达系统的工作流程。

图1 组合激光雷达系统工作流程Fig.1 Combined laser radar system workflow
1 机载激光雷达系统及其工作流程
机载激光雷达系统集全球卫星导航系统(Global Navigation Satellite System,GNSS)、惯性测量单元(Inertial Measurement Unit,IMU)和激光测距技术(Light Detection and Ranging,LiDAR)于一体,可以主动式、无接触地采集测量对象的空间信息。具体工作流程如图2所示,包括飞行设计、数据采集、数据融合解算3个步骤。

图2 机载激光雷达系统工作流程Fig.2 Workflow of airborne lidar system
1.1 飞行设计
飞行设计包括无人机和激光雷达设备的选型以及飞行航线的规划。文中选用多旋翼无人机,搭载Rigel mini VUX-1UAV激光雷达系统(参数如表1所示)进行点云数据的采集,可以将电力线轨迹导入系统,通过调节分辨率和条带覆盖宽度,根据地形信息限制,自动生成安全跨线的条带状电力测量航线。

表1 激光雷达系统主要参数Tab.1 Parameters of lidar system
1.2 数据采集
机载激光雷达系统系统在进行输电线路测量时,需要采集的数据有点云数据、高分辨率图像、IMU观测数据、无人机GNSS数据和基站GNSS数据。采集数据时,无人机操作人员需要通过远程控制平台对机载激光雷达系统的GNSS信号、影像质量、回波接收状态和实时环境条件进行监测并及时应对各种意外情况。
1.3 数据融合解算
为了得到输电线路的整体点云数据,需要对机载激光雷达系统采集到的原始数据进行联合解算,具体数据解算流程如图3所示。

图3 机载激光雷达系统数据解算流程Fig.3 Data solution flow chart of airborne lidar system
(1)RTK/PPK差分解算
实时载波相位差分技术(Real-Time Kinematic, RTK)在通信链路良好的情况下,可以基于流动站和基准站的GNSS观测数据进行实时差分解算,得到厘米级的定位结果。而在山区进行输电线路测量,通信链路较差的情况下,动态后处理技术(Post Processed Kinematic)可以在事后基于流动站和基准站的GNSS观测数据进行实时差分解算,同样能够得到厘米级的定位结果。
(2)GNSS-IMU联合解算
GNSS-IMU联合解算是指将GNSS数据与惯性导航传感器采集到的数据通过一定算法结合起来进行解算。GNSS具有精度高、误差不随时间发散的优点,但其采样率低且容易受遮挡影响;IMU具有采样率高、短时精度高且受外界环境影响小的优点,但其误差随时间累积。采用GNSS-IMU联合解算可以获得更高精度的定位数据,从而提高机载激光雷达的测量精度。
(3)点云数据定向
得到准确的定位结果后,联合系统的参数可以获取无人机的航迹文件,并为点云数据中的每一个点赋予坐标值,实现点云数据的定向。经机载激光雷达系统采集到的部分点云数据如图4所示。
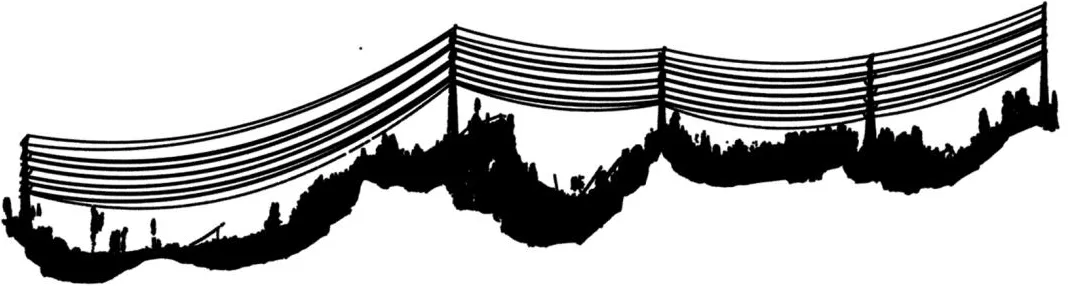
图4 部分输电线路走廊点云数据Fig.4 Part of point cloud data of transmission line corridor
2 地面激光扫描仪及其作业方案
地面激光扫描仪是激光扫描技术的又一载体,相比于机载激光雷达系统,地面激光扫描仪具有更高的扫描分辨率和测量精度,可以采集到测量对象更为精细的点云数据。
2.1 设备选型
文中采用的地面激光扫描仪型号为Leica ScanStation P50,扫描距离可达1 000 m,能够在360°×290°的扫描视场内以1 000 000点/秒的速度进行数据采集,测距精度可达1.2 mm +10 ppm。
2.2 作业方案
利用地面激光扫描仪进行测量时,由于激光沿直线传播且测量环境中遮挡物的存在,实际测量时需要对测量对象进行多测站多视角扫描,获取测量对象的分站点云数据。然后将各个测站的点云数据进行拼接,得到测量对象的整体点云数据。考虑到输电线路测量区域大尺度、长条状的特点,作业时采用已知后视点拼接方法,在扫描的同时完成数据拼接,这种方法可以兼顾拼接的精度与效率,示意图如图5所示。

图5 已知后视点拼接示意图Fig.5 Schematic diagram of known back-sight registration
作业方案的具体实施如下:
(1)测区踏勘。全面了解测区的范围和地形特征,选取合适的测站点和后视点,完成测区草图的绘制;
(2)坐标测量。采用GNSS接收机,利用RTK定位技术,测量各个测站点和后视点在WGS-84坐标系下的坐标并记录;
(3)扫描。设定扫描仪测站信息并捕捉后视点标靶,设定合适的扫描范围和扫描参数,对测量对象进行扫描。
3 输电线路测量试验
3.1 试验概况
输电线路测量试验地点位于河北省张家口市张北县,时间是2019年10月。输电线路为张北500 kV高压输电线,全长约20公里呈带状分布,地形起伏较小。
3.1.1 机载激光雷达系统作业
根据我国电力营运安全规范DLT 741-2010《架空输电线路运行规范》,对于500 kV的输电线路,需要排查输电线路走廊两边各20 m的走廊宽度。根据输电线路高度、地形条件和测量要求,飞行高度为80 m ~140 m、相对于避雷线(最上层的电力线)20 m,扫描分辨率为3 cm,航向重叠率和旁向重叠率分别为80%和70%。飞行时由人工和自主飞行组成,在扫描飞行前先进行快速直线和“8”字绕行来进行GNSS/IMU组合导航的校准精度的提高,然后升高到预定高度,沿航线进行飞行扫描,扫描结束后飞出测量区域做完“8”字绕行和快速直线后返回降落。其中一个电塔的点云数据共包含55 580个点,如图6所示。

图6 电塔点云数据-机载激光雷达系统Fig.6 Point cloud data of electric tower-airborne lidar system
3.1.2 地面激光扫描仪作业
利用地面激光扫描仪对电塔进行测量时,每个电塔分两站进行扫描,测站点和后视点的坐标通过GNSS接收机连接千寻知寸厘米级高精度定位服务,可以在几秒内获得厘米级定位结果。扫描范围通过扫描仪内置相机确定,扫描分辨率为1.6 mm@10 m,最大测量距离为120 m,每个测站扫描时间约5 min。其中一个电塔的点云数据共包含889 287个点,如图7所示。

图7 电塔点云数据-地面激光扫描仪Fig.7 Point cloud data of electric tower-terrestrial laser scanner
3.2 试验结果处理
由图6、图7可以看出,机载激光雷达系统获取到的电塔点云数据中点与点的间隔较大,而地面激光扫描仪获取到的电塔点云数据分辨率很高,杆塔结构清晰,绝缘子可见。为了获取输电线路的精细点云数据,可以将机载激光雷达系统和地面激光扫描仪采集到的点云数据融合在一起,如图8所示。

图8 融合点云数据Fig.8 Fusion point cloud data
其实质是两组点云数据坐标系的转换,通过选择3个以上的同名特征点对,如电塔的角点、顶点,计算出两个坐标系之间的转换参数——旋转矩阵R和平移向量T。
(1)


(2)
3.3 试验结果应用
基于机载激光雷达系统和地面激光扫描仪获取到的融合后的输电线路点云数据,并根据DLT 741-2010《架空输电线路运行规范》和输电线路测量要求,可以实现输电线路走廊中各个危险点的检测以及电力塔的倾斜度与变形监测。实际试验表明,组合激光雷达系统可以实现厘米级的测量结果可以满足输电线路的测量精度要求[15]。
3.3.1 危险点检测
输电线路点云数据中通常囊括了电塔、电力线、植被和地面等信息,在进行危险点检测前,需要分类提取这些数据。在机载激光雷达系统数据处理软件中,可以自动实现输电线路点云数据的分类,分类结果如图9所示。

图9 输电线路走廊点云数据分类图Fig.9 Point cloud data classification diagram of transmission line corridor
在输电线路点云数据分类结果的基础上,可以对输电线路走廊进行直观的观察并对电力线-植被、电力线-地面、电力线-建筑物和电力线-电力线等危险点进行检测,每个危险点的位置、类型和相对距离都可以从点云数据中精确获得,图10给出了部分危险点检测结果。

图10 危险点检测Fig.10 Danger point detection
3.3.2 电塔倾斜度与变形监测
电塔的倾斜度与变形速率是判断其在输电线路运行过程中是否安全的重要依据,从点云数据中可以得到电塔几何特征点的精确坐标,利用这些坐标数据可以计算出电塔的倾斜度。通过扫描不同时期的电塔点云数据,对比不同时期的电塔几何特征点的相对位置即可实现电塔的变形监测。
4 结束语
文中针对传统人工测量输电线路方法精度与效率较低的问题,提出一种机载激光雷达系统与地面激光扫描仪协同工作的组合激光雷达系统。该系统利用机载激光雷达系统采集输电线路走廊点云数据,利用地面激光扫描仪采集电塔高精度点云数据,通过计算两个坐标系之间的旋转矩阵和平移向量,实现两组点云数据的融合。试验结果表明,该系统可以高效、准确地实现输电线路走廊中危险点的检测以及电力塔的倾斜度与变形监测,具有一定的实用价值。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子测试(2018年15期)2018-09-26 06:01:50
电子制作(2018年16期)2018-09-26 03:27:00
通信电源技术(2016年4期)2016-04-04 02:58:08
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58
河南科技(2014年4期)2014-02-27 14:07:32
河南科技(2014年5期)2014-02-27 14:05:42
