
全方位移动机器人的研究分析与展望
2023-03-01 17:06黄威凛汪子珣梁昀轲韩冰清
科技与创新 2023年4期
黄威凛,汪子珣,梁昀轲,韩冰清
(合肥工业大学,安徽 合肥 230000)
机器人技术代表着先进制造技术与科学技术发展的最高水平,其融合了自动控制、传感、高端制造与人工智能等新兴的综合性技术,成为了国家第三产业科技创新中的重要组成部分。特别是在工业自动化浪潮中机器人技术的应用,解放了大量工人重复性工作的同时,也提高了整体的工作效率,各种危害性高、工作强度大的工作都将逐步由机器人来完成。近年来,随着“工业4.0”口号的提出,工厂自动化、仓库物流运输智能化的需求快速增加,被广泛应用于码头、仓库、分拣中心、物流中心等。在最新的全国两会、二十大上,国家也相继出台了多项政策来扶持机器人产业的发展,争取早日形成产业集群,发挥产业规模化优势,为国家生产力的标志性体现——制造业制定新的标准,因而机器人的应用需求被加速普及。
受益于国家物流行业的不断增长及电商经济的全民普及,全方位移动机器人的市场需求在近些年来迎来了爆发式增长,运动灵活、自主性强的优势使其在产品的生产制造运输过程中起到了重要的作用,对国家经济的发展起到了重要的拉动作用。市场调研表明,自2013 年以来,中国物流市场已跃居世界第一。从国内物流总额的构成看,工业用品物流总额占物流总额的比例已超过90%,主导了国内物流的发展,随着电子商务成为人们日常生活中息息相关的一部分,消费群体与物流行业已趋向一个整体。在此过程中,全方位机器人的迭代更新变得更加急迫,而目前国内很多机器人都是跟随固定路线移动或是固定位置协同搬运,在机器人转向、移动、承载量等多方面仍待提高,因此全方位移动机器人的研发完善也已经被提上了日程,助推国内物流发展的同时也可以应用于轻工业、重工业、海洋探索、军事领域及太空探测等领域。
国际上依据不同的因素将机器人划分为不同类别:按照移动的自由度,将机器人可以分为单自由度机器人和多自由度机器人;依据多样化的作业环境,国际上将机器人分为空间探测机器人、地面机器人、飞行机器人及水下机器人等;而根据机器人移动机构的区别,又可以将机器人分为腿式移动机器人、履带式移动机器人、轮式移动机器人等[1]。
本文调研分析的全方位移动机器人归属于多自由度地面轮式移动机器人中的一个大类,其全方位移动一般是基于四轮独立转向驱动或不同轮子之间的差速从而实现零转弯半径的全向移动,简化大量的传统齿轮机构和转向机构等机械设计的同时将多种运动模式融为一体,既保证了机器人平稳性,又进一步提高机器人的运动能力、转向能力,支持机器人自旋、横移、斜移等多种模式,能够满足狭小空间内机器人自由移动需求。基于三维立体空间,可以将全方位移动机器人分为3 个自由度,包括一个绕z轴的转动自由度和2个分别沿x、y轴移动的移动自由度,从而实现在平面内真正意义上的全向移动[2-3]。
1 全方位移动机器人研究现状
1.1 全方位移动机器人的定义
全方位移动指机器人在任意时刻,以任意的姿态在任意方向上保持全向移动的能力。全方位移动机器人全向移动的实现主要是通过不同的轮系结构设计与不同轮组之间的配合(如图1 所示)。目前国际上主流的2 种全方位移动方法是通过独立驱动各个轮组,依靠不同轮组之间的差速实现全方位移动和通过组合改进轮系实现全向移动。
1.2 全方位移动机器人的轮组类型
全方位移动机器人的轮组类型如图1 所示。

图1 现有的全方位轮[4]
脚轮,又称为Castor 轮,脚轮全向移动的实现主要是依靠其中心轴中的万向轴或滚动轴承,是生活中最为常见的万向轮,应用市场庞大,如移动货架、推拉箱等。
1973 年瑞典工程师BENGT 第一个提出了麦克纳姆(Mecanum)轮[5]。麦克纳姆轮的核心构件由轮辐和周围的许多小滚子组成,小滚子以轴线为中心进行360°旋转[6],麦克纳姆轮由多样化的排列组合方式组合,使机器人可在运动平面内任意移动与转动。
1974 年美国研究者BLUMRICH 设计了一种交错布置的双排全向轮[7]。其与麦克纳姆轮的主要区别是轮毂上滚子的排列方式与排列角度不同,其内外2 排轮毂不同时与地面接触,保证了一定的偏差角,使机器人移动过程中的连续性更好、稳定性更强。
球轮(ball wheel)核心构建包含滚动球体、支撑滚子、驱动滚子3 部分。球轮的支撑滚子固定在机器人的底盘上,驱动滚子固定在绕球体中心转动的支架上[8]。该设计理念由Goodyear 公司在2016 年、2017年的日内瓦车展上展出,是工业上第一个具备智能感知、变形、互连和趋势的人工智能概念轮子。
国内对于全方位移动机器人的研究起步略晚,但已由追赶到引领。早期东南大学在全方位移动平台的设计中采用了麦克纳姆轮[9],该机器人被广泛应用于轮船、火车、飞机等大型物件的零部件的周转运输中,其还能够在复杂的条件环境下完成自主导航规划路径,识别不同的路标、路径等功能。
浙江大学基于麦克纳姆轮研制的全方位移动的足球机器人[10],在2019-07-07 举行的澳大利亚机器人世界杯比赛中取得了第一的好成绩,其核心构架为车轮配备驱动电机,进而控制电机的驱动实现全方位移动。
上海交通大学依托国家大基金863 项目基金的支持,开发出了“交龙”全方位移动机器人,是国内完全自主知识产权的中型自主式足球机器人[11]。
此外,沈阳航空航天大学在参考了大量传统的轮系轮组结构后,设计了一种移动轮式机构——MY(Mutual YoYo)轮[12],如图2 所示。该设计理念的核心在于轴线上的2 个自由球体,自旋的同时也可以绕主轴一起旋转,2 个球体不同时与地面接触,从而实现了连续性,完成全方位移动。
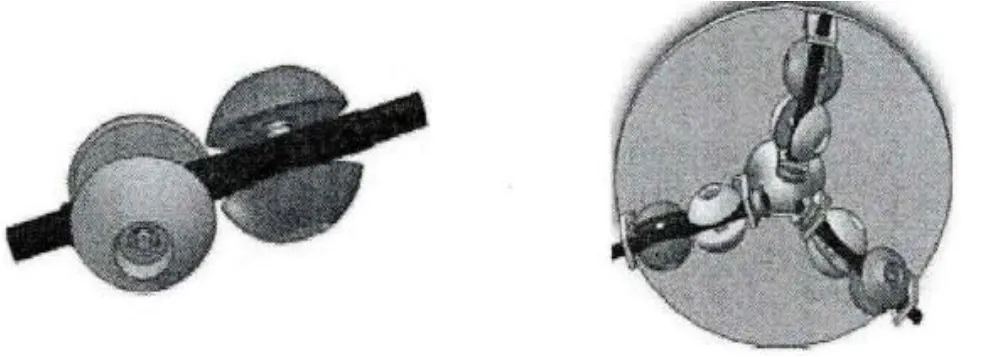
图2 MY 轮
南开大学段峰教授、日本前桥工业大学朱赤教授等[13]在新一期的国家项目中为匹配外骨骼机器人,针对于全方位移动机器人的底盘结构提出了新的设计方案——使用轮毂电机承重,其主要由4 个轮毂电机、4个直流无刷电机、4 个调速器和集体支架等构成。全方位移动主要依靠不同轮子之间的差速运转,借助轮毂电机省去了大量的传统齿轮机构和转向机构,提高了转向角度的平稳性。机器人通过轮毂电机内的制动轴实现了电磁制动,使机器人在转向时能够精确定位自身位置,依靠轮毂电机及调速器内的速度编码器和转角编码器,可以实时监控机器人的移动速度与角度,在算法弹性范围内进行及时纠偏,保证机器人稳定工作。
对全方位移动的各运动方式对比如表1 所示。
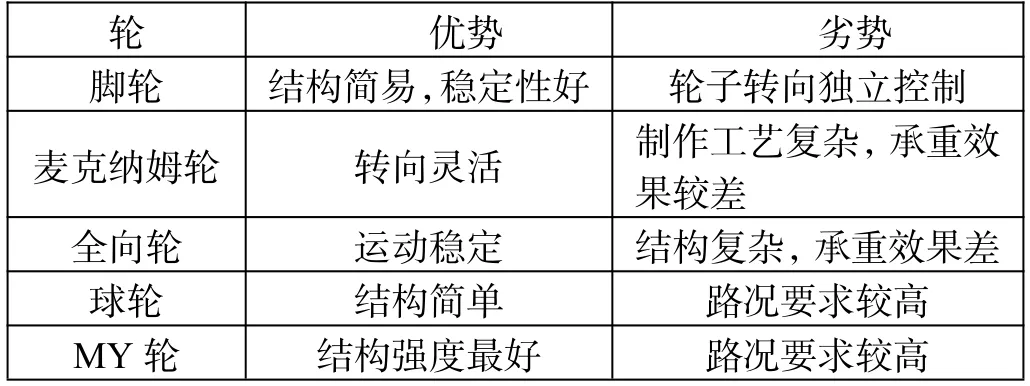
表1 全方位移动常见轮子对比
1.3 全方位移动机器人的轮系类别
全方位移动机器人还可以通过轮系实现全方位移动,其主要依靠于轮系之间的协同配合改进实现。
差速轮如图3 所示,其主要由2 个互相旋转的轮系对称组成,2 个轮系无转向功能,但可以通过2 轮的差速实现整个小车的前进、后退、移动、转向等多种功能。其数学模型较为简单,结构简易,控制容易,被广泛应用于生产搬运过程中,但其实现转向时的转弯半径较大,载重能力较差导致使用时受局限。

图3 差速轮轮系方案
麦克纳姆轮轮系方案如图4 所示,通过4 个不同的麦克纳姆轮进行轮系组合和规则排列实现全方位移动,由于其本身轮子制造的难度较大以及使用寿命较短等,一般被用于试验性验证中,较少被大规模使用。
图4 麦克纳姆轮轮系方案
舵轮轮系方案如图5 所示,舵轮将运动电机、转向电机以及减速器集成于一体,其主要有3 种分布方式:①单舵轮分布。舵轮位于机器人的中心位置,后面2 个万向轮组成一个轮系组,舵轮为整个轮系起转向和驱动作用,适应于多样化的工况中。②双舵轮分布。一般情况下舵轮为对角分布,另一组对角轮为万向轮,协同配合实现全方位移动及零转弯半径转向,适用于狭小复杂的工况中。③四舵轮分布。机器人四轮皆为舵轮,但其运动控制模型较为复杂,实现全方位移动的算法难度较大。

图5 舵轮轮系方案
对全方位移动的轮系进行调研研究,将常见的轮系布置方案进行对比总结,如表2 所示。

表2 全方位移动轮系分析[14]
2 全方位移动机器人的模型分析方法
在全方位移动机器人机械设计的基础上,全方位移动机器人要真正实现运动能力,还需要考虑到机器人自身的运动学和动力学模型,其是机器人运动分析或机械系统控制的核心部分。而随着人们对于机器人的多样化需求及机器人工作工况的日益复杂,现行的机器人的动力学方程和运动学建模标准更高。目前主流的机器人理论研究运动建模方法主要有:①坐标转换法。该理论方法由MUIR 等[15]提出,其主要是基于基坐标系,再针对机器人的每个运动关节建立关节坐标系,基于坐标系的参考数据,利用D-H 坐标变换法可以得到机器人相对于机器人本体及固定参考物的位置变化坐标与数据信息,通过对机器人的时间变量求导,就可以解方程得到机器人的速度与位姿的雅可比矩阵,从而得出机器人的运动学方法,但其求解方程、偏导计算过程较为复杂。②几何约束法。机器人在移动运动的过程中,机器人自身执行刚体与末端存在几何约束条件,根据约束条件可以分列相关的运动学方程,如美国MIT 通过机器人轮心高度在轮子坐标系中的多重表示方法建立的运动学方程[16];沈阳自动化所常勇等[17]的轮心建模法,针对性地分析多刚体地运动及复杂地面环境下机器人地转动角速度特性等建立运动学方程等。③速度等式法。选定固定参考物,计算机器人整体位置姿态、机器人轮系速度、机器人末端速度、机器人执行刚体的速度与固定参考物之间的速度关系,可以得出机器人的运动学方程[18],根据固定参考物的数据信息可以求解机器人的运动学方程,从而解出机器人的参数信息。
在建立动力学模型的过程中,目前科研的主流研究方向是机器人的正运动学与逆运动学求解,数据信息的分析方法主要有牛顿-欧拉方程、拉格朗日方程和凯恩方程法等。牛顿-欧拉方程主要依据质心动量守恒的定理列出机器人的动力学方程,能够完整表达出机器人内部各机构的受力关系,但由于其受力机构之间的复杂性导致方程数量多,计算效率较低;拉格朗日方程作为自动控制中常见的求解方程之一,只需计算机器人的动势能,但是由于拉格朗日方程的动能求解方程中导数与偏导数的求解难度随着机器人部件数量的增加而倍增,导致其在求解复杂机器人模型时的计算量十分庞大,一般只在求解简易动力学方程时使用;凯恩方程法是基于矢量运算,通过矢量方程逐步推导出机器人的递推公式,且该方法不涉及机器人的动势能计算,将机器人内部各受力机构看作一个整体,但其适用范围仅仅局限于串联机构。
3 发展展望
绝大多数机器人在研发应用的过程中都需要充分考虑其运动能力,全方位移动将会是未来机器人移动发展的一大主流。随着机器人应用领域的不断扩展,机器人的工作环境将不仅局限于室内到室外,还将逐步覆盖到海陆空的三维立体空间应用,同时机器人执行的任务与要求也越来越复杂。根据市场需求及对未来发展方向的预测,以下这些方向值得关注。
全方位移动机器人的结构设计。现行的大部分全方位移动机器人注重于轮系轮组的研发,对于整体机器人的仿生学——结构仿生、控制仿生、材料仿生等方面的研究还不够充分,有巨大的研究价值与实际应用空间。
全方位移动机器人的自主控制。随着技术的发展和需求的多样化,机器人所面对的将会是动态变化的工况环境,机器人依据收集外部环境的传感信息进行自主判断,完成避障、三维立体空间轨迹规划、复杂工况下的路径优化等。因此可以考虑将全方位移动机器人的控制技术与神经科学、人工智能等学科相结合,向完全自主可控方向发展。
全方位移动机器人的实际建模。现今对于绝大多数全方位移动机器人的研究中,其在建模时,弱化了很多因素的影响,比如轮组与地面之间的不连续接触、从动轮与轮毂之间的摩擦等,在建模过程中往往被简单概括或者忽略,但是这些影响因子会极大影响到大型、高载重的全方位移动机器人的使用寿命,因此全方位移动机器人的机理建模也是研究工作的一大重点。
全方位移动机器人的性能提高。机器人的种类多样使机器人所能实现的任务愈发多样,机器人移动是所有机器人都绕不开的问题,多样性的环境与复杂的任务对于机器人的适应性、针对性、可靠性等提出了更高的要求,需要对这些进行新的设计与规划,寻求一种通用的求解方法。
4 总结
全方位移动机器人的研究对于当下国家经济的发展具有很强的现实意义,满足市场需求的同时还可以促进科学技术的迭代更新。目前国际上的主流研究方向为机器人的轮系轮组、运动控制和模型设计3 方面,机器人适用的工况环境被局限,未来发展的潜力空间巨大。
全方位移动机器人由于机械结构设计的多样性、轮系轮组的方案和硬件材料的不同,以及控制系统的复杂鲁棒性及不同工况和多样化的地面环境等影响因子的变化,其动力学特性和运动学模型有着很大的不同,缺乏一款通用的全方位移动机器人平台设计。因此,在对全方位移动机器人进行研究设计过程中,要综合考虑机械结构、轮组特性、工作环境、控制精度、自主性和灵活性等因素,提高全方位移动机器人的通用性、兼容性和可靠性,满足多样化的需求。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
中国自行车(2018年9期)2018-10-13
中国自行车(2018年7期)2018-08-14
中国自行车(2018年7期)2018-08-14
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年3期)2017-06-23
中国自行车(2017年1期)2017-04-16
陶瓷学报(2015年4期)2015-12-17
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
