
一种抑制后续换相失败的变斜率电流偏差控制方法
2023-02-24 06:21:28晁武杰邓超平黄均纬李元琦王渝红陈立维
电力建设 2023年1期
晁武杰,邓超平,黄均纬,李元琦,王渝红,陈立维
(1.国网福建省电力有限公司电力科学研究院,福州市 350007;2.四川大学电气工程学院,成都市 610065;3.福建省智能电网保护与运行控制重点实验室,福州市 350007)
0 引 言
高压直流输电具有输电容量大、输电距离远以及线路损耗小等优点,是解决新能源外送、提高新能源利用率的重要措施[1-2]。传 统 的 电 网 换 相 高 压 直 流 输 电 (line commutated converter high voltage direct current,LCC-HVDC)技术在我国高压直流输电工程中应用广泛,LCC-HVDC采用不具备自关断能力的晶闸管作为换流元件,当受端交流系统发生故障时易发生换相失败,换相失败可能造成输送功率瞬时骤降以及直流闭锁和损坏设备等后果,严重地威胁着交直流系统的安全稳定运行[3-4]。后续换相失败作为单次换相失败的继发性故障会给交直流系统带来多次冲击,引发更加恶劣的后果,因此,研究抑制后续换相失败的方法具有重要的理论和工程意义[5-6]。
目前,国内外学者在LCC-HVDC后续换相失败方面进行了部分研究并取得了一些成果。文献[7]从逆变侧控制器交互的角度详细分析了后续换相失败的产生机理,分析指出逆变侧由定电流控制切换为定关断角控制后,电流偏差控制(current error control,CEC)输出的快速降低会导致关断角不受控制,进而可能引发后续换相失败。文献[8]详细分析了受端交流系统不对称故障情况下后续换相失败的产生机理,分析表明不对称故障后实际超前触发角发生的周期性波动,可能造成直流系统在恢复阶段发生后续换相失败。文献[9]基于换相电压时间积分和面积分析了后续换相失败的产生机理,指出了导致后续换相失败的直接和间接因素,并进一步提出了后续换相失败风险指标来定量评估系统后续换相失败风险。在后续换相失败的抑制措施研究方面,文献[10]通过虚拟电阻将直流电流的动态特性引入低压限流控制器(voltage dependent current order limiter,VDCOL) ,降低了LCC-HVDC输电系统后续换相失败的风险,但虚拟电阻的引入会使系统恢复速度减慢。文献[11]指出VDCOL输出电流指令的剧烈波动可能引发后续换相失败,提出了一种虚拟电容控制方法,有效地改善了故障后 VDCOL 输出电流指令的剧烈波动情况,降低了发生后续换相失败的风险。文献[12]对VDCOL的控制方案进行改进,采用模糊控制对直流电流进行调节进而抑制后续换相失败的发生。文献[13]探究了储能有功出力影响交直流混联电网换相条件的作用机理,并从储能有功出力时间与出力幅值的角度出发提出了抑制后续换相失败的储能有功出力协调控制策略。文献[14]提出一种可根据直流电流和换相电压的动态变化来调节直流电流指令的基于虚拟换相面积缺乏量的控制策略,有效降低了发生后续换相失败的概率。文献[15]针对同步参考坐标系锁相环动态响应速度缓慢的问题,提出了一种改进锁相环技术来提高触发相位控制的精度,有效减少了后续换相失败的发生。
在LCC-HVDC系统中,整流侧的定最小触发角控制与逆变侧的定关断角控制特性曲线斜率很接近,为避免系统在调节过程中定最小触发角控制与定关断角控制特性曲线相交导致控制系统不稳定,在逆变侧定关断角控制和定电流控制之间的切换处配置有一个正斜率的CEC[1]。目前对于CEC的研究相对较少,文献[16]指出在CEC作用阶段发生换相失败的概率较大,并提出了一种关断角动态补偿的连续换相失败抑制方法。文献[17]提出了一种非线性动态CEC方法,提高了关断角增量对电流偏差的灵敏度,增大实际关断角裕度,降低了后续换相失败发生的概率。
基于上述研究现状,本文结合CEC的作用机理,提出一种变斜率CEC方案。该方案可根据故障严重程度调整CEC斜坡函数的斜率,增加关断角增量对电流偏差的灵敏度,使输入相同电流偏差时能输出更大的关断角增量,即增大关断角的换相裕度,从而有效抑制后续换相失败的发生。进一步对比不同斜率的CEC对直流系统运行特性的影响。最后在PSCAD/EMTDC仿真软件中基于CIGRE HVDC标准测试系统进行仿真验证,以验证理论分析的正确性。
1 系统基本控制原理
CIGRE HVDC标准测试系统控制结构如图1所示,图1中:Idre为整流侧直流电流;Udin、Idin和γdin分别为逆变侧直流电压、直流电流和关断角;Idord和Iord分别为主控制极和实际输出的直流电流指令值;γord为逆变侧关断角的指令值;βCC和βCEA分别为逆变侧定电流控制和定关断角控制输出量;αre和αin分别为整流侧和逆变侧触发角指令值。
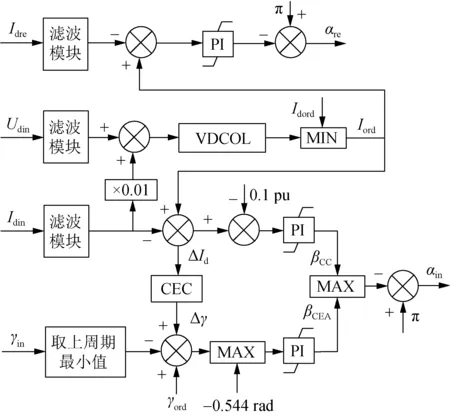
图1 CIGRE HVDC标准测试系统控制结构Fig.1 Control structure of CIGRE HVDC standard test system
整流侧配置有定电流(constant current,CC)控制和恒定触发角(constant firing angle,CIA)控制;逆变侧配置有定熄弧角(constant extinction angle,CEA)控制、CC控制、CEC以及VDCOL。正常运行时,整流侧采用定电流控制,逆变侧采用定关断角控制。
由于整流侧和逆变侧均配备定电流控制,为确保在由测量误差或其他原因引起误差的情况下两条定电流曲线不会相交,通常在二者间设置10%的裕度。当直流电流在0.9~1 pu之间时,逆变侧控制将从CEA转至CC,整流侧控制将从CC转至CIA。由于CEA和CIA的特性曲线斜率十分接近,所以两条特性曲线的相交点在系统的动态变化中可能不唯一。在这个区域内,交流电压的微小变化也会引起直流电流的大幅度改变,且会在控制方式和抽头的切换间产生大的摆动[1]。为避免此问题,通常在逆变器的CEA和CC特性曲线间引入一个正斜率的CEC。全套控制系统的静态伏安特性曲线如图2所示。
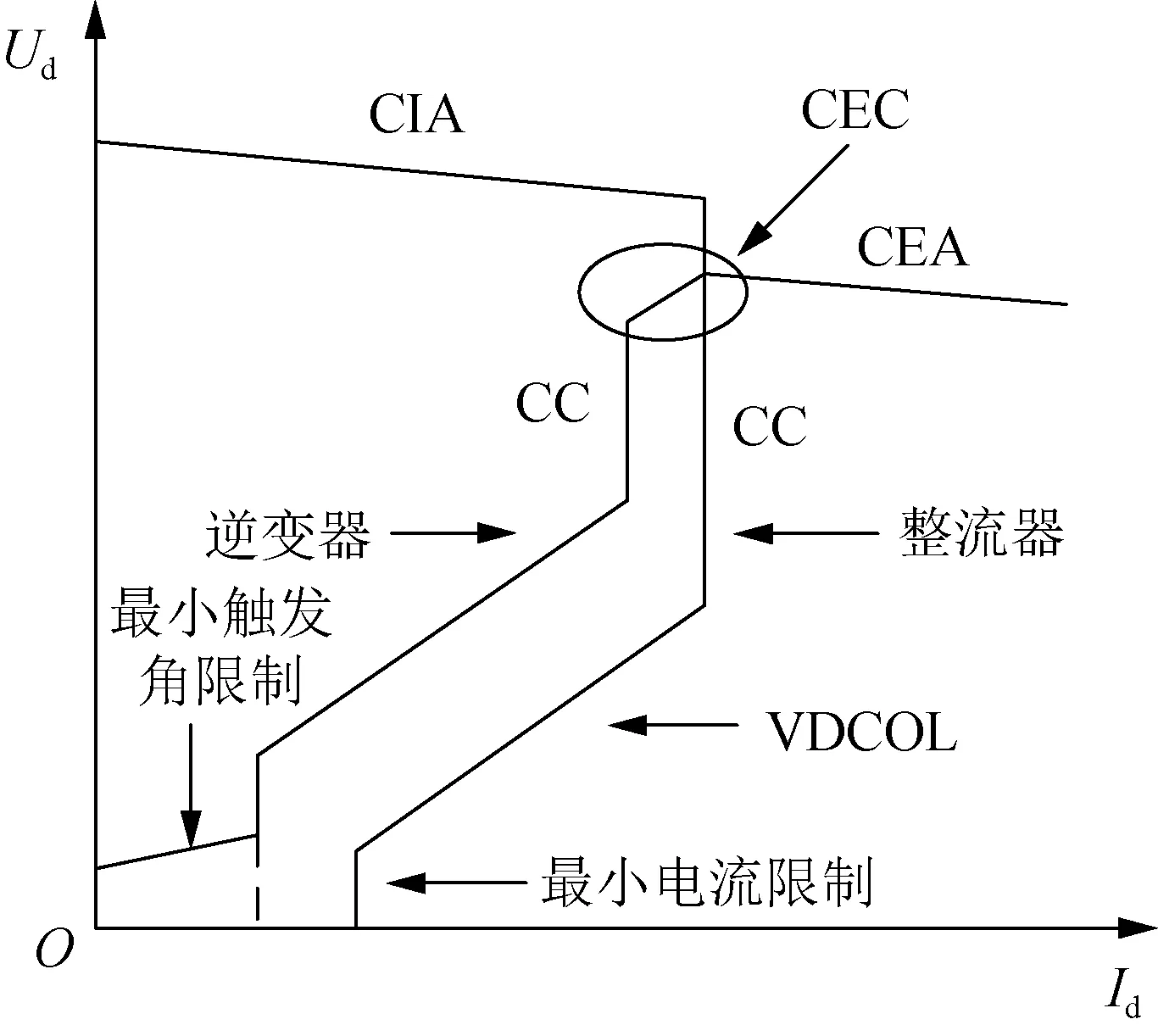
图2 全套控制系统的静态伏安特性Fig.2 Static volt-ampere characteristics of the complete control system
2 电流偏差控制及其改进策略
2.1 电流偏差控制分析
当整流侧直流电流指令值大于逆变侧实际直流电流值时,CEC将输出关断角补偿量Δγ到定关断角控制中,增大关断角的整定值,快速调节逆变侧关断角。CIGRE HVDC标准测试系统CEC的静态特性曲线为斜坡函数,如图3所示,其中电流偏差ΔId与关断角增量Δγ之间的关系如式(1)所示。
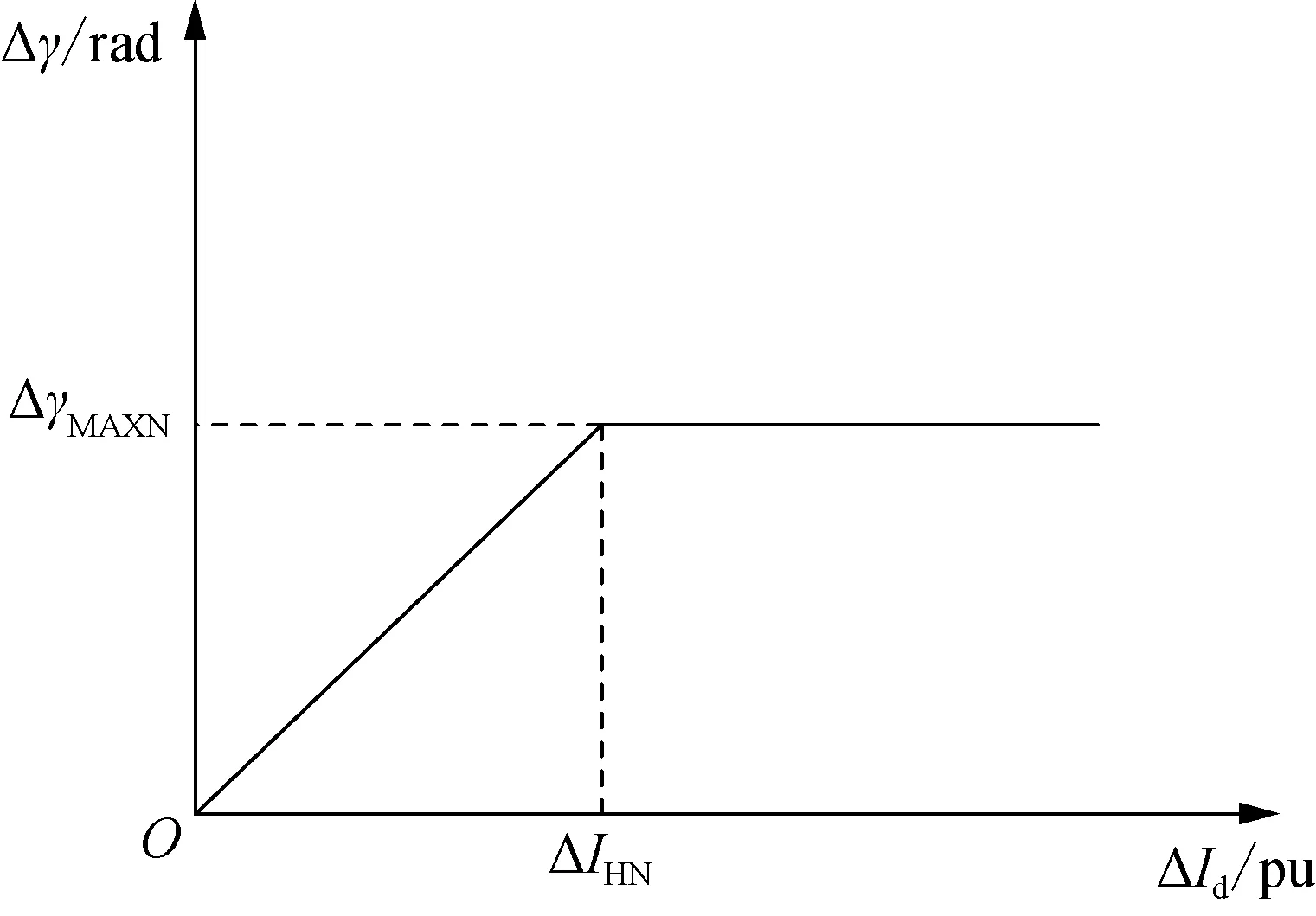
图3 电流偏差控制静态特性曲线Fig.3 Static characteristic curve of current deviation control
(1)
式中:ΔId为整流侧直流电流指令值与逆变侧直流电流实际值的差值;Δγ为输出的关断角增量值;ΔIHN为
输入直流电流偏差饱和值;ΔγMAXN为输出关断角增量最大值;K是斜坡函数的斜率。CIGRE HVDC标准测试系统中ΔIHN取为0.1 pu,ΔγMAXN取为 0.279 3 rad,此时斜率K为:
(2)
从以上对CEC特性曲线分析可知,当电流偏差ΔId达到饱和值时,CEC输出的关断角增量将达到最大值,不能根据故障严重程度增大输出关断角增量的值。此外,CEC斜坡函数的斜率K由输出关断角增量最大值和输入直流电流偏差饱和值决定,当输出关断角增量最大值和输入直流电流偏差饱和值固定时斜率K也固定,在不同严重程度故障下输出关断角增量对电流偏差的灵敏度一致,此时灵敏度不能根据故障严重程度进行自适应调节。逆变侧关断角不足是发生换相失败的根本原因,逆变侧关断角整定值恒定时,CEC输出的关断角增量若能根据故障严重程度自适应地快速增大,进而增大实际的换相裕度,则可能减少发生后续换相失败的风险。
2.2 变斜率电流偏差控制
基于以上分析,本文对CIGRE HVDC标准测试系统CEC特性进行改进,使CEC能按照故障严重程度调节斜坡函数的斜率和输出关断角增量,当直流输电系统发生首次换相失败后系统恢复过程中,增大逆变器的关断角和换相裕度,进而减少发生后续换相失败的风险。
仿照换相失败预测控制的故障检测功能对不对称故障和对称故障进行检测,其中不对称故障检测是通过比较三相电压瞬时值相加得到的三相零序电压是否大于不对称故障检测的阈值来判断是否发生不对称故障,计算公式为[1]:
U0=Ua+Ub+Uc
(3)
式中:Ua、Ub、Uc为换流母线三相交流电压瞬时值;U0为三相交流电压瞬时值的零序电压。
对称故障检测是通过abc-αβ坐标变换将三相电压瞬时值变换到两相静止坐标系中,并根据两相静止坐标系的均方根值是否大于对称故障检测的阈值来判断是否发生对称故障,计算公式为[1]:
(4)
式中:Uα、Uβ分别为两相静止坐标系下α、β相电压值;Uαβ为Uα和Uβ的均方根值。
当交流系统故障严重程度达到任一故障检测的阈值时,故障检测器将输出不对称故障检测与对称故障检测的较大者UCF,UCF的大小能较好地描述故障严重程度,计算公式为:
UCF=max(U0,Uαβ)
(5)
CEC斜坡函数的斜率由输出关断角增量最大值和输入直流电流偏差饱和值决定,将故障检测器输出的UCF输入到CEC中,对CEC的输入直流电流偏差饱和值或输出关断角增量最大值进行改进,使CEC输出的关断角增量能根据故障严重程度自适应地做出调整。自适应CEC控制结构如图4所示,图中ABZ_LEVEL是对称故障检测器的阈值,设置为0.15;DIFF_LEVEL是不对称故障检测器的阈值,设置为0.14[1]。
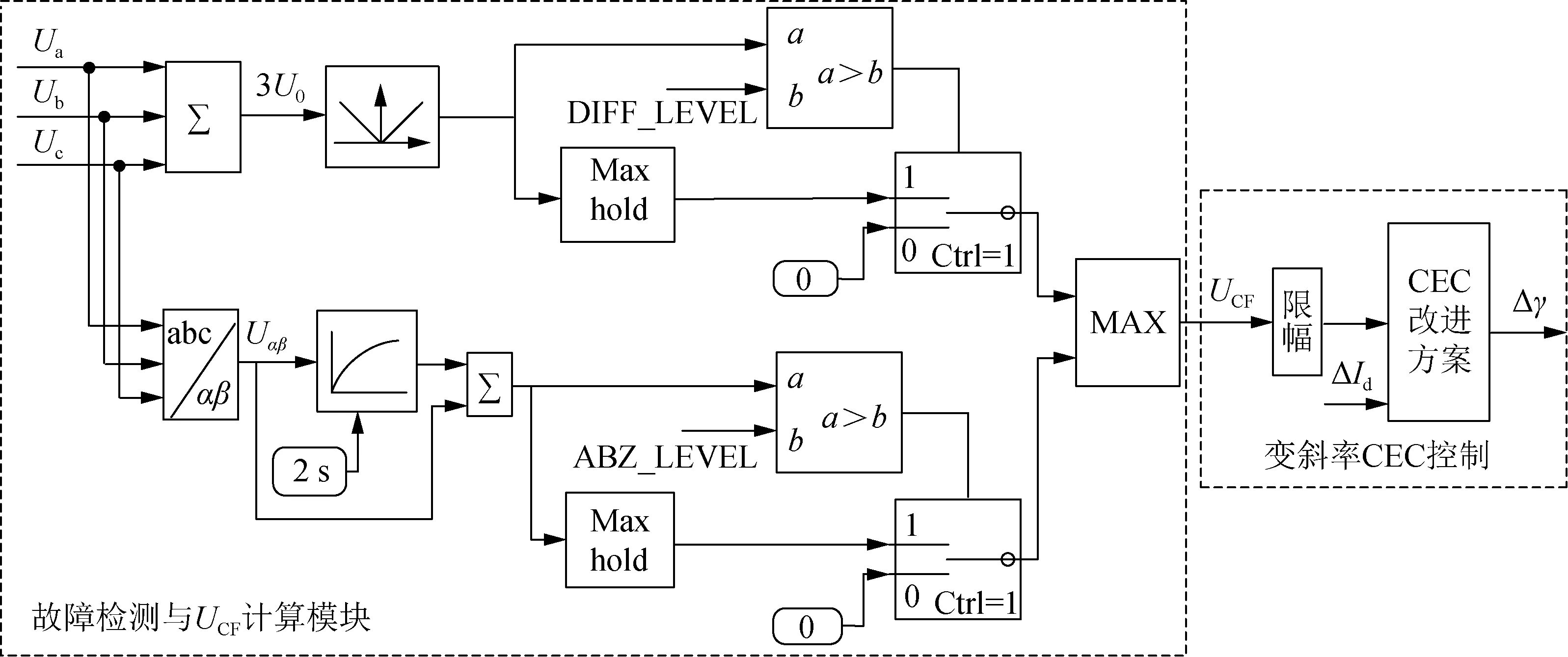
图4 变斜率电流偏差控制结构Fig.4 Structure diagram of variable-slope current deviation control
对CEC的三种改进方式如下:
1)方式一对CEC改进后的特性曲线如图5所示,固定CEC的输入量直流电流偏差饱和值不变,运用上述故障检测器输出的UCF改变CEC输出的关断角增量最大值ΔγMAX,如式(6)所示。
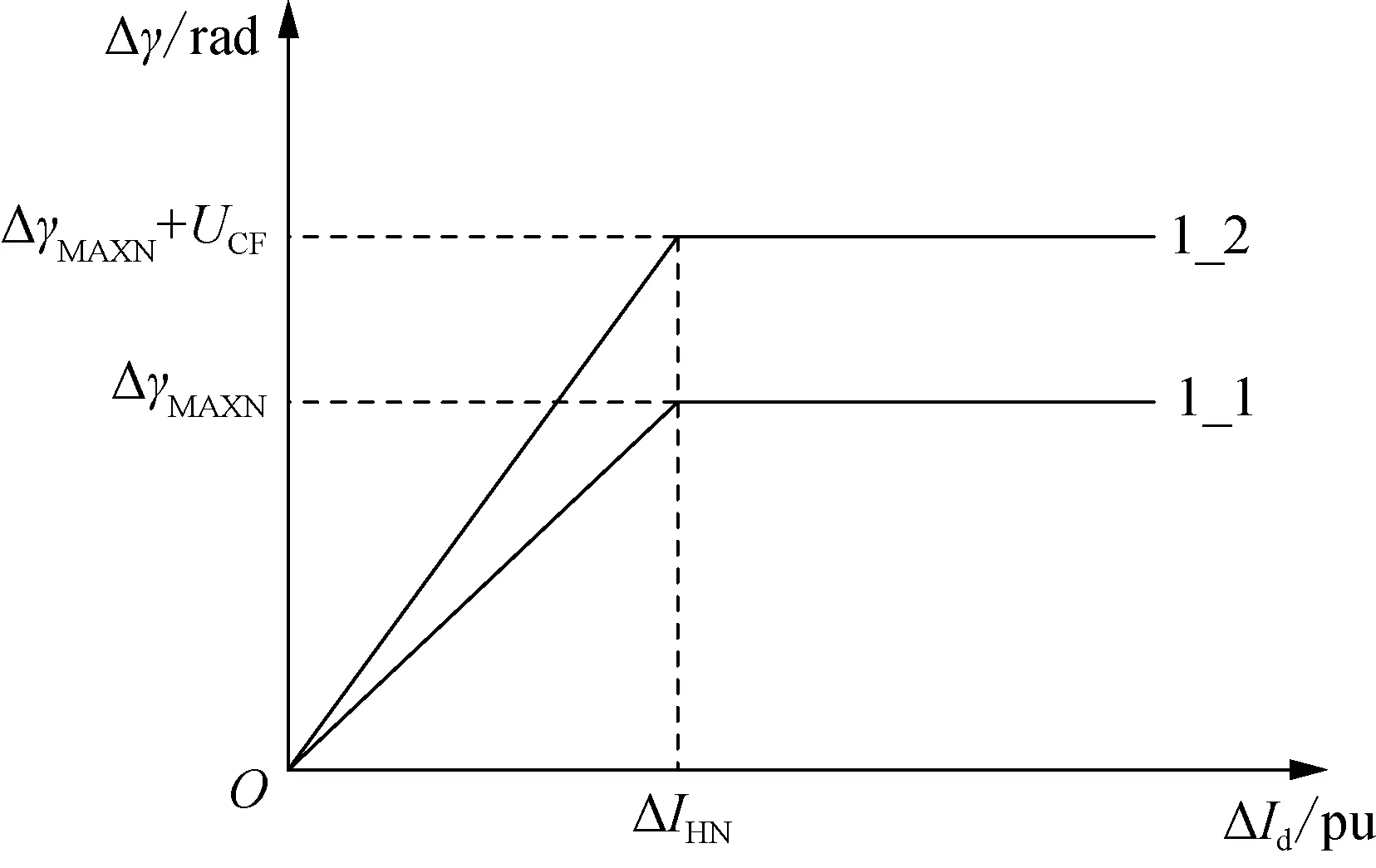
图5 方式一CEC特性曲线Fig.5 CEC characteristic curve of Scheme 1
(6)
方式一CEC斜坡函数的斜率K1能根据故障严重程度做出调整,如式(7)所示:
(7)
此时CEC在不同故障严重程度下对输入的电流偏差灵敏度不同,使CEC输出的关断角增量能根据故障严重程度自适应地变化。改进后的方式一CEC特性的表达式如式(8)所示。为避免UCF出现极端情况恶化系统运行,UCF限幅为0~0.2 pu。
(8)
2)方式二对CEC改进后的特性曲线如图6所示,固定CEC的关断角增量最大值不变,运用上述故障检测器输出的UCF改变CEC的输入量直流电流偏差饱和值ΔIH,如式(9)所示。
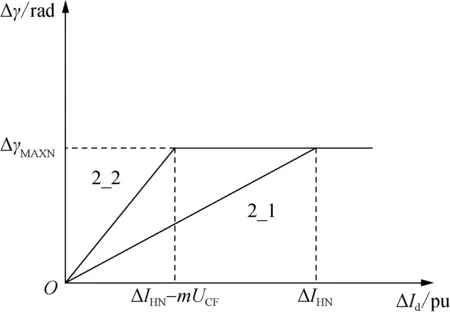
图6 方式二CEC特性曲线Fig.6 CEC characteristic curve of Scheme 2
ΔIH=ΔIHN-mUCF
(9)
式中:参数m选为0.5。
方式二CEC斜坡函数的斜率K2能根据故障严重
程度做出调整,如式(10)所示:
(10)
此时CEC在不同故障严重程度下对输入的电流偏差的灵敏度不同,使CEC输出的关断角增量能根据故障严重程度自适应地变化。改进后的方式二CEC控制特性的表达式如式(11)所示。为避免UCF出现极端情况恶化系统运行,UCF限幅为0~0.18 pu[18]。
(11)
3)方式三对CEC改进后的特性曲线如图7所示,运用上述故障检测器输出的UCF同时改变CEC的输出关断角增量最大值ΔγMAX和输入量直流电流偏差饱和值ΔIH。此时,方式三CEC斜坡函数的斜率K3能根据故障严重程度做出调整,如式(12)所示。
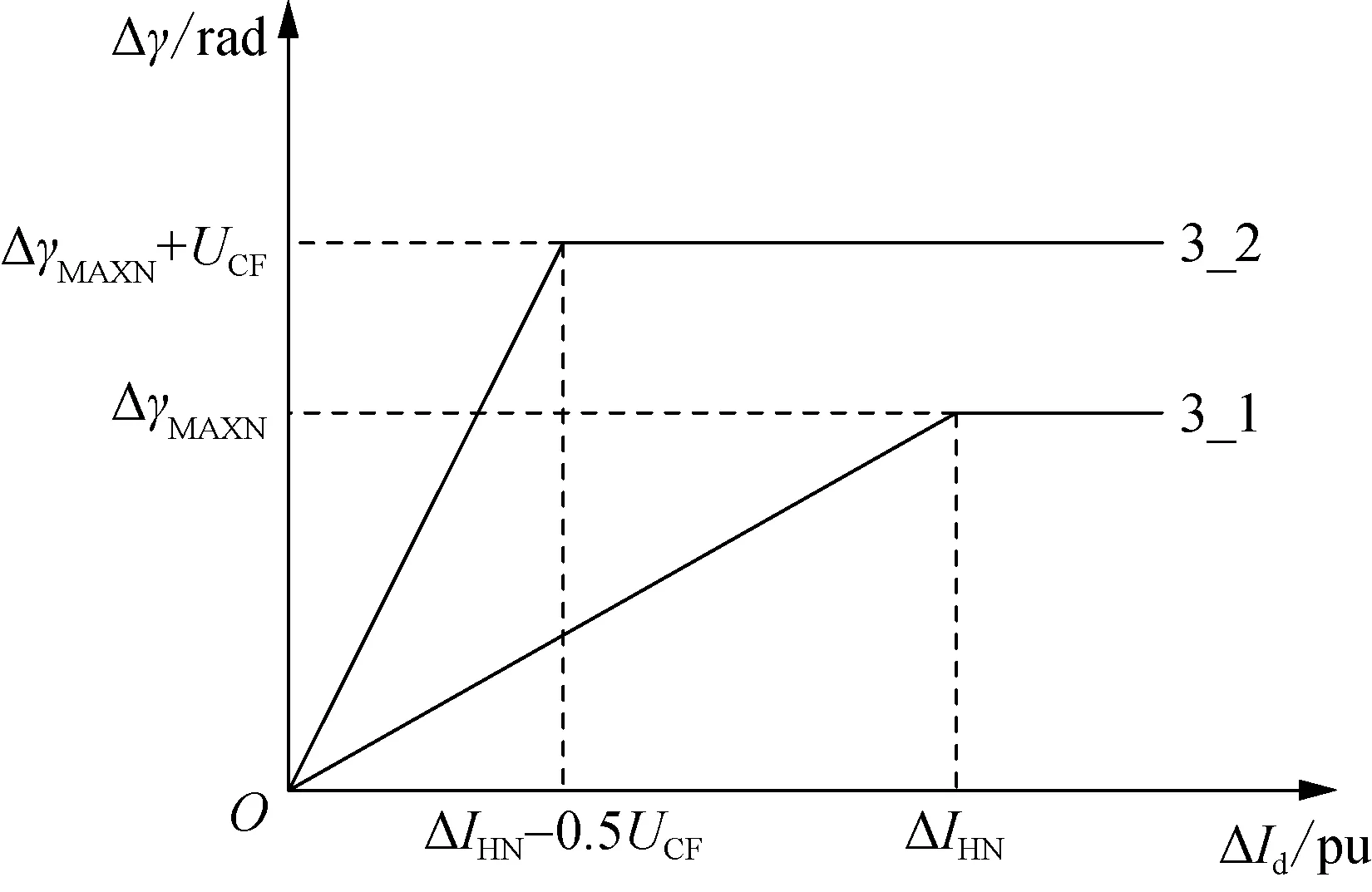
图7 方式三CEC特性曲线Fig.7 CEC characteristic curve of Scheme 3
(12)
因此,修改后的CEC在不同故障严重程度下对输入的电流偏差灵敏度不同,使CEC输出的关断角增量能根据故障严重程度动态地变化。改进后的CEC控制特性的表达式如式(13)所示。为避免UCF出现极端情况恶化系统运行,UCF限幅为0~0.18 pu。
(13)
根据式(13)和图7可知,系统正常运行时,故障检测器输出的UCF为0,此时,CEC特性为CIGRE HVDC标准测试系统中CEC特性,如曲线3_1。当逆变侧受端交流系统发生故障时,故障检测器输出的UCF不为0,CEC特性为曲线3_2,关断角增量最大值由ΔγMAX变为ΔγMAXN+UCF,直流电流偏差饱和值由ΔIH变为ΔIHN-0.5UCF,且故障越严重关断角增量最大值越大,直流电流偏差饱和值越小,CEC特性曲线的斜率越大,对电流偏差越灵敏,输入相同的电流偏差能输出更大的关断角增量。当故障结束后,系统恢复正常时,故障检测器输出的UCF为0,CEC的控制特性变回曲线3_1。
2.3 CEC斜率对控制效果的影响
从以上分析可以看出,三种改进后CEC斜坡函数的斜率大于CIGRE HVDC标准测试系统中CEC斜坡函数的斜率且均能根据故障严重程度做出调整,从而使CEC输出的关断角增量能随故障严重程度动态地变化,但是CEC斜坡函数的斜率不同,对电流偏差的灵敏度不同,在输入电流偏差相同的情况下,输出的关断角增量会有差异,从而对直流输电系统运行特性的影响也不同。为得到CEC斜率对系统控制效果的影响,分析了不同斜率的CEC对系统输出关断角增量、有功功率和无功功率的影响。仅更改横坐标CEC斜率和仅更改纵坐标CEC斜率作差为:
(14)
本文所提变斜率CEC方式的斜率与仅更改横坐标CEC斜率作差为:
(15)
因此,在输入电流偏差的一定范围内,输入相同的电流偏差时,本文所提CEC策略输出的关断角增量最大,仅更改横坐标的CEC策略居中,仅更改纵坐标的CEC策略在三者中最小。另一方面,根据换流器等效电路和稳态模型,直流输电系统中部分电气量具有如下关系[1]:
Pac=Pd=UdId
(16)
Qac=Pactanφ
(17)
(18)
式中:Pac为交流侧吸收的有功功率;Pd为交流侧输送的有功功率;Qac为交流系统消耗的无功功率;φ为交流系统功率因数角;γ为换流器关断角;β为换流器超前触发角。
由式(16)—(18)可知,直流输电系统中γ越大,φ会越低,换流母线处无功需求会越大,直流传输功率会越低,不利于直流输电系统的经济运行。因此,在输入电流偏差的一定范围内,CEC斜坡函数的斜率越大,换相裕度增加越大,越有利于抑制后续换相失败,但不利于故障后系统传输功率的恢复,直流输电系统输送功率会越低。
3 仿真验证
3.1 仿真模型
为验证本文所提变斜率CEC方案抑制后续换相失败的有效性,在PSCAD/EMTDC仿真软件中基于CIGRE HVDC标准测试系统实现本文所提方案,并进行仿真验证。CIGRE HVDC标准测试系统额定直流输送功率为1 000 MW,额定电压为500 kV,额定电流为2 kA,模型的详细拓扑结构和参数见文献[10]。
3.2 仿真分析与验证
为验证本文所提变斜率CEC方案的有效性,在2种工况下分别采用以下5种控制方案进行仿真,记录相关电气量的变化情况,对比分析5种控制方案抑制后续换相失败的有效性。
方案一:CIGRE HVDC标准测试系统控制策略;
方案二:文献[18]所提控制策略。
方案三:将方案一中CEC替换成仅更改横坐标的变斜率CEC。
方案四:将方案一中CEC替换成仅更改纵坐标的变斜率CEC。
方案五:将方案一中CEC替换成本文所提变斜率CEC。
工况1:在逆变侧换流母线处设置接地电感Lf为0.6 H的三相接地故障,故障开始时间为1 s,持续0.2 s,分别采用以上5种控制方案进行仿真,相关电气量的变化情况如图8所示。
由图8可知,在上述工况下,采用方案一时,直流系统连续发生两次换相失败,输送功率、直流电流以及换流母线电压具有两次较大的波动,对系统产生两次较大的冲击。采用方案二、方案三、方案四和方案五时,由于故障后电压迅速降低且跌落较严重,几种改进后的CEC均来不及反应,不能抑制首次换相失败的发生。首次换相失败后,四种改进后的CEC动作,抑制
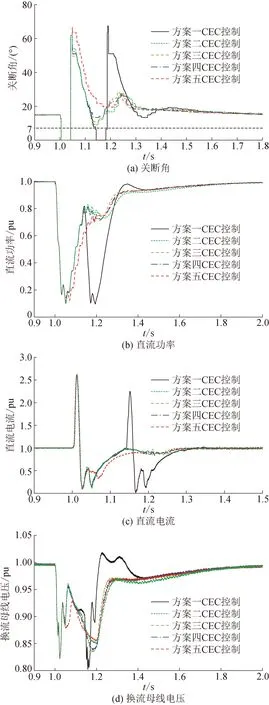
图8 三相故障Lf=0.6 H时系统的运行特性Fig.8 System operation performance under three-phase fault with Lf= 0.6 H
了直流系统发生后续换相失败,输送功率、直流电流以及换流母线电压只有一次较大的波动,且随着故障的清除均能较快地恢复稳定。在首次换相失败后的几个周期里,四种改进方案均具有足够的换相裕度,其中换相裕度最大的是方案五,最小的是方案二。另一方面,采用方案二时系统输送功率恢复速度最快,方案五系统输送功率恢复速度最慢,验证了上文理论分析的正确性。
工况2:在逆变侧换流母线处设置接地电感Lf为0.4 H的单相接地故障,故障开始时间为1 s,持续0.2 s,分别采用以上5种控制方案进行仿真,相关电气量的变化情况如图9所示。
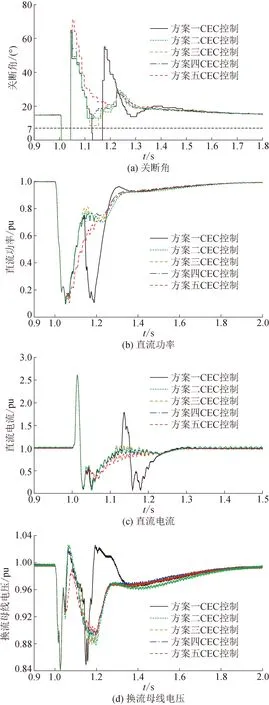
图9 单相故障Lf=0.4 H时系统的运行特性Fig.9 System operation performance under single-phase fault with Lf= 0.4 H
由图9可知,采用方案一时直流系统连续发生两次换相失败;采用方案二、方案三、方案四和方案五时均能有效抑制后续换相失败的发生,方案五的换相裕度最大但输送功率恢复速度最慢,方案二的换相裕度最小但输送功率恢复速度最快,故障清除后输送功率、直流电流以及换流母线电压均能较快地恢复稳定,验证了上文理论分析的正确性。
为更加全面地验证本文所提变斜率CEC控制的有效性,在不同故障类型和故障水平下进行大量仿真测试,并记录以上5种控制方案下换相失败次数。故障水平的定义为[17]:
(19)
式中:UL为换流母线电压;ω为角频率;PdN为直流系统的额定传输功率。故障水平FL越大,表示故障越严重。
故障水平设置为5%~50%,以5%为步长进行变化,在逆变侧换流母线处设置单相和三相接地故障,分别采用以上5种控制方案进行仿真,换相失败次数的统计如表1所示。
由表1可知,当故障水平较小时,采用方案一不发生换相失败,采用方案二、方案三、方案四和方案五也不会发生换相失败。当故障水平较大时,采用方案二、方案三、方案四和方案五均能有效地抑制直流系统发生后续换相失败,且方案四和方案五的效果优于方案二和方案三。在50%的故障水平范围内,方案四和方案五的连续换相失败次数相同,但从图8和图9中可以看出方案五的关断角最小值最大,直流电流和直流功率的波动更小,换流母线电压的跌落程度也更小。虽然方案五的恢复时间较慢,但是其可以抵御更加严重的故障,在预防换相失败方面的效果最优。因此,采用本文所提变斜率CEC控制方案能有效抑制直流系统发生后续换相失败,提高系统对后续换相失败的免疫能力。

表1 五种控制方案下直流系统连续换相失败次数Table 1 Number of continuous commutation failures in HVDC under four control methods
4 结 论
1)本文对CIGRE HVDC标准测试系统中CEC进行改进,使其输出的关断角增量能根据故障严重程度自适应地做出调整,仿真结果验证了改进方法的有效性。
2)CEC斜坡函数的斜率越大,对输入电流偏差越敏感,换相裕度增加越大,越有利于抑制后续换相失败,但不利于故障后系统传输功率的恢复,直流输电系统输送功率会越低。
3)所提的变斜率CEC方案均能有效地减少发生后续换相失败的风险,改善系统在故障情况下的运行特性,提高系统对后续换相失败的免疫能力。
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:12:22
测控技术(2021年10期)2021-12-21 07:10:20
物理之友(2020年12期)2020-07-16 05:39:16
中学生数理化·中考版(2019年9期)2019-11-25 09:39:44
通信电源技术(2018年3期)2018-06-26 06:33:32
福建中学数学(2016年7期)2016-12-03 07:10:28
光学精密工程(2016年1期)2016-11-07 09:01:53
电信科学(2016年9期)2016-06-15 20:27:25
电测与仪表(2016年6期)2016-04-11 12:05:54
电源技术(2015年11期)2015-08-22 08:50:36
