
重力场对欧拉屈曲梁非线性吸振器分岔特征的影响研究
2023-02-22 14:29:26刘海平申大山
振动与冲击 2023年3期
刘海平, 张 俊, 申大山
(1. 北京科技大学 机械工程学院, 北京 100083; 2. 北京科技大学 顺德研究生院, 广东 佛山 528300)
由于线性吸振器工作频带窄,吸振效率低等缺点,极大限制了其在工程领域的适用范围;而非线性能量阱作为一类典型的非线性动力吸振器因其质量轻、工作频带宽、吸振效率高、附加质量小[1-4]等优点而受到持续关注。
近年,国内外众多学者将非线性能量阱的研究视野从基础研究逐渐拓展到航空航天[5-6]、民用建筑[7-8]等应用工程领域,并提出多种可行的实现方案[9-13]。
针对上述非线性吸振器的研究,主要包括减振性能评价[14-16](如:时域和频域各部分的动态响应和对应的能量传递特征)和非线性特征(如:分岔特征)分析[17]。显然,针对非线性系统分岔特征的研究,更利于从减振机制和工作机理方面,从源头实现设计参数最优化。
截至目前,在理论研究方面,Starosvetsk等[18-19]率先使用复变量-平均法结合多尺度法对非线性系统的鞍结(saddle-node,SN)分岔和霍普夫(Hopf)分岔进行研究。谭平等[20]采用多尺度法对基底受简谐激励作用非线性吸振器的分岔特性展开讨论。李爽等[21]主要考虑简谐激励力幅值变化对非线性吸振器全局分岔特性的影响。在应用研究方面,甄冬等[22]将非线性吸振器应用到汽车车身垂向振动抑制中,并分别针对附加立方刚度和负刚度非线性吸振器的SN分岔特性进行研究。
上述研究中,不考虑重力场的影响,非线性吸振器多采用横向布置方案;然而,在实际工程中非线性吸振器往往需要垂向布置[23];显然,垂向布置方案必须考虑重力场的影响。
以航天器在轨飞行阶段所受微振动为例,星载飞轮作为一类典型的微振动源,对保证高精度卫星的技战术指标至关重要。Sun等尝试采用非线性能量阱对星载飞轮在轨工作阶段的输出微振动进行抑制。实际中,星载飞轮将经历主动发射段(包含地面重力场、大气阻力等)和在轨工作段(包含空间微重力等)不同类型激励(基础激励和力激励)和环境条件,进而对非线性能量阱的减振效果产生显著影响。考虑重力的影响,Chen等[24]重点研究了基础激励条件下非线性能量阱的动态响应和减振效果的变化规律;但是,针对该系统分岔特性的变化规律并未研究。此外,上述研究均未提出非线性能量阱的可实现形式。显然,针对重力场对非线性能量阱影响的理论研究和应用研究均不充分。屈曲梁作为一类典型的工程结构,因具备独特的非线性特征而得到广泛研究[25]。从工程实际出发,刘海平等[26]采用欧拉屈曲梁构建非线性吸振器,针对不同安装方式对其减振效果的影响进行对比并给出最佳设计方案。在此基础上,本文重点针对力激励条件下,重力场对欧拉屈曲梁非线性吸振器分岔特性的影响展开研究。首先,采用复变量-平均法获得非线性系统的慢变方程;进而推导出相应的分岔边界;最后,选择欧拉屈曲梁非线性动力吸振器的部分关键设计参数讨论重力场对其分岔特征的影响。相关研究成果,可为非线性吸振器的理论研究和工程应用奠定基础。
1 模型建立
分别建立有无重力场时安装欧拉屈曲梁非线性吸振器的耦合动力学模型。
1.1 无重力场情况
不考虑重力场的影响,建立非线性耦合系统动力学模型,如图1所示。图1中:M,K,c1分别为主振系的惯性质量、刚度和阻尼;k和c2分别为非线性吸振器的刚度和阻尼;另外,x和y分别对应主振系惯性质量和非线性吸振器的位移;f为作用在主振系惯性质量上的外力。
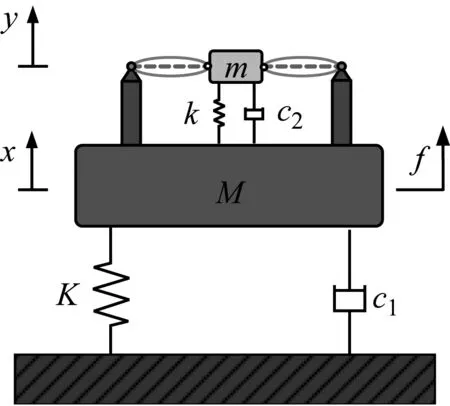
图1 非线性耦合系统动力学模型(无重力场)
根据牛顿第二定律,得到系统运动微分方程
(1)
1.2 有重力场情况
若考虑重力场的影响,主振系与非线性吸振器构成的耦合系统动力学模型,如图2所示。
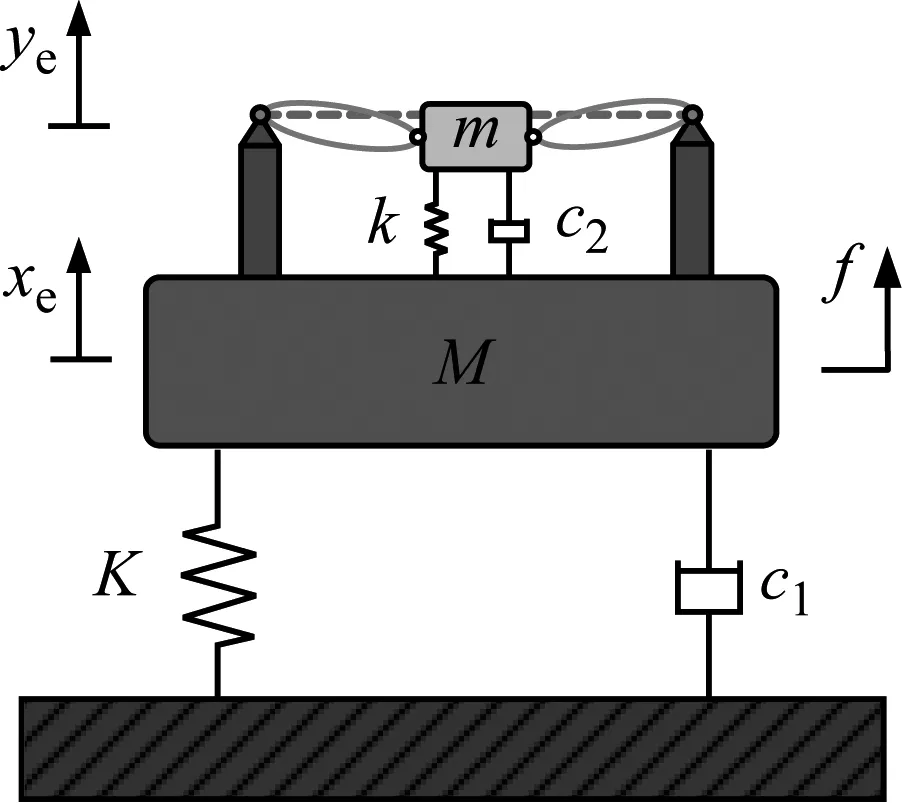
图2 非线性耦合系统动力学模型(有重力场)
由图2可知,对应系统的运动微分方程

(2)
对比图1和图2可见,受重力场影响的非线性吸振器和主振系的惯性质量均会下降一段距离,到达新的平衡位置。进而,根据静力平衡关系可知平衡点的位置方程为
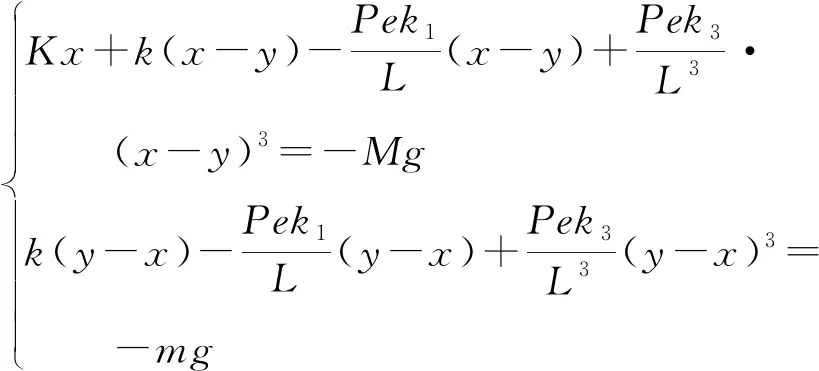
(3)
推导得到静平衡位置为
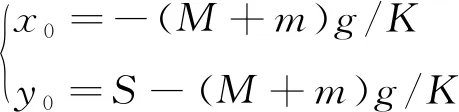
(4)
其中
为了便于计算,引入新变量将坐标系转换到静平衡位置

(5)
将上述定义的新变量代入式(2)后,可得

(6)
1.3 慢变流方程
为了方便分析,进行坐标变换并定义无量纲化参数
通常,非线性系统的分岔特性主要考虑激励频率接近主振系固有频率1∶1∶1的内共振情形,即:Ω=(1+μσ)。其中,σ为激励频率失调参数。
通过以上处理,式(1)和式(6)对应不同模型的运动微分方程变换为
模型一:无重力场情况
(7)
模型二:有重力场情况
(8)
进一步,利用复变量-平均法研究系统慢变动力流,引入新的复变量
(9)
式中:i为单位虚数;φi为系统慢变幅值。若不考虑主振系的阻尼,将式(9)代入式(7)和式(8),通过平均化处理,可消除快变响应部分;同时,令φj=φje-iμστ(j=1,2),可得系统慢变流。
模型一:无重力场情况
(10)
模型二:有重力场情况
(11)
2 分岔边界

模型一:无重力场情况
iμσφ2+iφ2-iμσφ1-iφ1+2ξ2(1+1/μ)φ2-

(12)
模型二:有重力场情况
(13)

α3Z3+α2Z2+α1Z+α4=0
(14)
其中,模型一对应参数为
模型二对应参数为
求解式(14)所得的根即为不动点,对应方程周期解。
2.1 SN分岔
SN分岔是非线性系统平衡点变化的一种形式,式(14)分别存在单个解和3个解的情况,其解的边界与SN分岔相对应。对式(14)求导,得到
3α3Z2+2α2Z+α1=0
(15)
联立式(14)和式(15),将Z消除,得到
f=3α3(α1α2-9α3α4)2+
(16)
式(16)即为SN分岔边界,因式(16)中所有参数均与A,ξ2,δ有关,所以上述方程可写成
f(A,ξ2,δ)=0
(17)
通过求解式(17)容易求得参数A,ξ2,δ对应的SN分岔边界。
2.2 Hopf分岔
SN分岔只能表征系统平衡点数目随参数的变化特征,而解的稳定性还需进一步判断。在平衡点附近引入微小扰动
φ1=φ10+θ1,φ2=φ20+θ2
(18)
将式(18)代入式(10)和式(11),忽略关于扰动量的高阶小量,可得到系统平衡点附近的扰动方程
模型一:无重力场情况

(19)
模型二:有重力场情况
(20)
求解出式(19)和式(20)对应特征多项式方程
μ4+γ1μ3+γ2μ2+γ3μ+γ4=0
(21)
式中:μ为特征值;γ1,γ2,γ3,γ4太过复杂,详见附录A。
周期解稳定性可根据特征值μ判断,当系统出现Hopf分岔时,特征值满足纯虚数条件μ=±iω0,ω0为非零实数。代入式(21),通过分离实部与虚部,化简可得
(22)
将γ1,γ2,γ3,γ4代入式(22),可得关于平衡点的方程,整理后可得关于Z的形式
v1Z2+v2Z+v3=0
(23)
其中,v1,v2,v3相对复杂,可由MATLAB软件或Maple软件求解。
由式(23)可得
(24)
同时,Z也应满足式(14),将式(24)代入式(14),得
(25)
式(25)为系统Hopf分岔边界应满足的参数条件。
3 结果讨论与分析
通过第2章推导已给出安装欧拉屈曲梁非线性吸振器耦合动力学系统不同类型分岔的边界条件表达式。考虑研究工作的一致性,本章将结合已有研究给出的非线性耦合动力学系统的设计参数(如表1所示)展开讨论,具体分析重力场对系统的频响特性以及不同类型分岔特征的影响。
表1 设计参数值
3.1 重力场对频响特性的影响
结合表1的设计参数,通过复变量-平均法得到力激励条件下,考虑重力场影响的系统幅频响应曲线,如图3和图4所示。
为了验证解析计算结果的正确性,本部分首先采用四阶龙格库塔法通过数值方法计算得到力激励条件下系统响应幅值的稳态解,见图3。由图3可知,数值解与解析解吻合良好,证明本文给出的解析解正确。然后,考虑有无重力场条件下,计算得到系统的幅频响应曲线,见图4。由图4可知,在力激励条件下,重力场对系统幅频响应曲线的影响主要集中于谐振频率附近,相应幅值和峰值频率略有差异,但影响不明显。

图3 幅频响应曲线(考虑重力场)

图4 幅频响应曲线(有/无重力场)
3.2 重力场对分岔特性的影响
选取参数μ=0.02和δ=0.5,在二维平面(A,ξ2)绘制系统的SN分岔和Hopf分岔,如图5所示。可见,受重力场影响,实现相同类型分岔所需激励幅值更大,且相应分岔特征边界所包围的面积也更大。
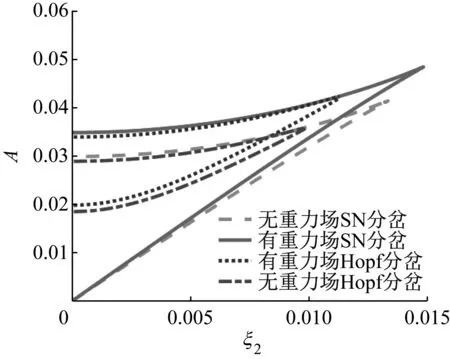
图5 重力场对分岔特性的影响
3.3 线性刚度对分岔特性的影响
本文所提出的欧拉曲梁非线性吸振器相比于严格意义上的纯立方刚度非线性能量阱,还包含一个线性刚度项,本部分即重点讨论线性刚度对系统分岔特性的影响。含线性刚度项前后不同失谐参数δ对应系统SN分岔特性的变化规律,分别如图6(a)、图6(b)所示。
相较于无重力场模型,考虑重力场影响耦合系统所含线性刚度项增加。由图6可知,含线性刚度项对应系统的SN分岔,随着失谐参数减小而增大,与不含线性刚度项对应系统SN分岔变化规律正好相反。此外,不考虑线性刚度模型SN分岔的变化规律与谭平所得结论一致,证明本文所建模型及分析结果的正确性。

(a) 含线性刚度
3.4 激励幅值对分岔特性的影响
考虑外激励对非线性系统响应特征的影响,保证设计参数不变,针对不同激励幅值对非线性系统分岔特性的影响展开讨论。结合第3.2节的分析结论,重力场仅改变分岔特征边界的大小,其变化趋势与无重力场相似,故,本节仅考虑有重力场工况,所得SN分岔与Hopf分岔,如图7所示。可见:随着ξ2变化,当ξ2<0.011 3时,SN分岔与Hopf分岔同时存在;当0.011 3<ξ2<0.014 8,仅存在SN分岔;当ξ2>0.014 8时系统的分岔特征完全消失。图7仅给出一组设计参数对应的情况,若改变设计参数,相应SN分岔和Hopf分岔曲线会呈现不同的重合方式。因此,分别选择ξ2=0.005和ξ2=0.013两种工况,观察系统响应幅值随激励幅值变化的规律,如图8所示。
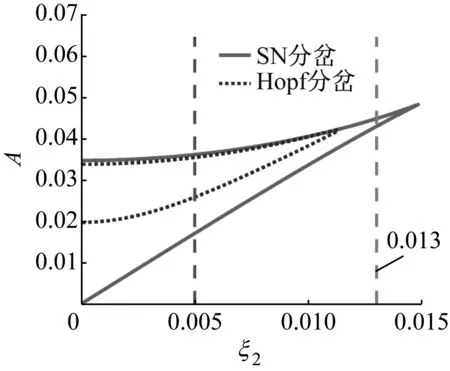
图7 SN分岔与Hopf分岔

(a) ξ2=0.005
选择ξ2=0.005时,当激励幅值逐渐变大时,系统由一个解变化为3个解,且会出现SN分岔和Hopf分岔共存的情况见图8(a)。其中,SN分岔点为A=0.017和A=0.036;Hopf分岔点为A=0.026和A=0.035。
当选择ξ2=0.013时,当激励幅值逐渐变大时,系统由一个解变化为3个解;此时,仅存在SN分岔,Hopf分岔不存在。其中,SN分岔点为A=0.043和A=0.045。
考虑重力场影响,当激励幅值增大时,响应幅值也会不断增大,且多解情况和不稳定区域会持续存在,当幅值达到一定程度,上层大幅值响应和下层小幅值响应会重合,但多解区间并未消失,反而会增大,如图9所示。
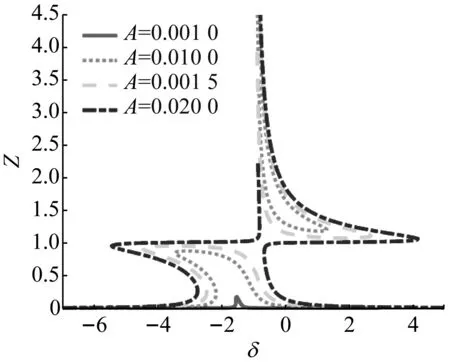
图9 不同激励幅值下频响曲线
3.5 设计参数对分岔特征的影响
由于影响欧拉屈曲梁非线性吸振器的设计参数众多,其中,相比其他非线性吸振器方案,初始挠度q0、长度L以及斜置倾角θ为新增设计变量,故本部分重点针对上述3个变量对SN分岔与Hopf分岔特性的影响展开讨论。
3.5.1 初始挠度q0的影响
考虑有重力场条件下,欧拉屈曲梁初始挠度对系统分岔特性的影响,选取参数μ=0.02,δ=0.5,计算结果如图10所示。由图10可知,初始挠度q0变化对系统分岔特性的影响不显著。
3.5.2 梁长度L的影响
考虑欧拉屈曲梁长度L对系统分岔特性的影响,计算结果如图11所示。由图11可知,相较于初始挠度q0,欧拉屈曲梁长度L对于系统分岔特性的影响较大。随着梁长度增加,系统SN分岔与Hopf分岔包围范围均不同程度减小。
3.5.3 斜置倾角θ的影响
欧拉曲梁斜置倾角θ对系统分岔特性的影响,如图12所示。可见,随着斜置倾角θ增大,系统SN分岔所需的激励幅值和3个周期解的边界减小,且Hopf分岔不稳定解所包围的范围减小。

图12 不同斜置倾角对应SN分岔和Hopf分岔
4 结 论
本文主要研究了考虑重力场影响,对欧拉屈曲梁非线性吸振器在1∶1∶1内共振情形下随参数变化的分岔特性。主要得到以下结论:
(1) 力激励条件下,重力场对系统幅频响应曲线的影响主要集中于谐振频率附近,相应幅值和峰值频率略有差异,但影响不明显。
(2) 受重力场影响,安装非线性吸振器系统的SN分岔和Hopf分岔边界均有所扩大。
(3) 考虑重力场影响,当失谐参数变小时,安装非线性吸振器系统的SN分岔和Hopf分岔所包围范围变大,原因在于非线性吸振器含有线性刚度;若不考虑线性刚度,与上述结论恰好相反。
(4) 随着设计参数变化,系统存在SN分岔以及Hopf分岔共存的情况;而且,受阻尼比ξ2的影响,两种分岔共存的情况会发生变化。
(5) 随激励幅值增大,重力场导致系统响应幅值Z变大;系统的解由一个变为多个并且整个解枝分为上下层;当激励幅值继续增大,上下两层重合并且多解区间不会消失。
(6) 众多设计参数中,欧拉屈曲梁长度及斜置倾角对考虑重力场情况下的系统分岔特性影响较大,随着梁长和斜置倾角增加,系统SN分岔所需的激励幅值减小;SN分岔与Hopf分岔边界均减小。
附录A
无重力


有重力
γ3=4ξ2(δ2μ2+δ2μ+2μδ+1),
16L6δ2μ2ε2+32L5Peδ3μ2ε1+96L5Peδ2μ2zε3-32L5Peδ2μ2εε1-96L5Peδ2μzεε3+
32L6δμε2+32L5Peδ2με1-32L5Peδ2εε1+48L5Peδμzε3-64L5Peδμεε1-
96L3PeS2δ2με3+96L3PeS2δ2εε3+192L3PeS2δμεε3-96L2Pe2S2δ2ε1ε3-
猜你喜欢
汽车观察(2022年12期)2023-01-17 02:20:42
哈哈画报(2022年1期)2022-04-19 11:27:20
车迷(2022年1期)2022-03-29 00:50:26
汽车实用技术(2021年16期)2021-09-09 02:15:18
中国惯性技术学报(2019年6期)2019-03-04 09:50:08
数学小灵通·3-4年级(2017年9期)2017-10-13 08:11:04
测绘科学与工程(2017年1期)2017-05-04 03:40:41
噪声与振动控制(2015年4期)2015-01-01 07:08:32
噪声与振动控制(2015年4期)2015-01-01 07:08:23
振动工程学报(2014年2期)2014-03-01 01:15:12
