
三维激光扫描仪在高速铁路轨道线形测量中的应用
2023-02-19 09:32:18何思源
铁道勘察 2023年1期
何思源
(中铁第一勘察设计院集团有限公司,西安 710043)
引言
三维激光扫描测量技术通过激光快速扫描,可以自动、连续、快速地获取目标物体表面的采样点数据,并以点云形式表现目标物体表面的几何特征。
目前我国高速铁路投入运营后在部分区段出现了钢轨波磨现象。高速铁路钢轨波磨不但导致了车辆轨道结构高频振动,而且还对车辆运行安全产生隐患[14]。针对上述问题,探讨了将三维激光扫描仪应用于轨道线性测量,采用后方交会CPⅢ坐标进行自由设站确定仪器中心坐标,进而获取物体表明三维坐标的方法。以期实现一测多用,提高工作效率及数据利用率,为扫描仪用于轨道线形测量提供技术支持。
1 三维激光轨道线形扫描方法
MS60高速影像全站扫描仪基于Leica MergeTEC技术,高度集成三维激光扫描技术、超高精度测量技术、数字影像技术,GNSS技术,扫描速度最高可达30000点/s,扫描精度可达 0.6 mm@50m。MS60相关技术参数见表1。

表1 MS60扫描仪技术参数
基于后方交会自由测站的MS60扫描仪作业示意见图1,扫描仪整平后置于轨道一侧,提前导入最新CPⅢ复测成果,测量均匀分布于测站前后的8个CPⅢ控制点,计算并查看设站精度是否满足X,Y,H三个方向的设站精度要求小于0.7 mm,设站扫描参数:扫描模式设置为30 kHz/30 000点,点云水平夹角45″,竖直夹角13″。设置完成后开始扫描作业,为保证点云密度,设站间距为40 m。对于双线轨道,扫描线路呈“Z”形布设,对于单线轨道扫描仪,置于钢轨中间即可。

图1 MS60扫描仪设站作业示意
2 精度分析
2.1 点云平面坐标精度推算
参考高速铁路工程测量规范中相关要求:全站仪自由设站半测回观测4对CPⅢ控制点后,自由设站点的X方向不确定度为ux=0.7 mm、Y方向不确定度为uy=0.7 mm[15],则自由设站点平面不确定度为
(1)
极坐标测量中,引入的标准不确定度分量u2,扫描工作开始时,可以认为全站仪采用极坐标法采用免棱镜模式测量构筑物点坐标[16],则任一点云平面坐标为
(2)
式中,S为设站点A至P点的水平距离;α为定向角;αp为水平方向观测值。则激光扫描点的不确定度为
人们可问的一个基本问题是:基于射线的方法足以模拟广角反射/折射数据吗?答案并非直截了当。它依赖于我们对由广角反射/折射数据得到的模型的解译能力。地质学家们面对广角反射/折射数据得到的模型有时也会感到迷惑。在地表或近地表的地质观测中推断出的壳体和断层在这一模型中几乎很难被识别出来(如,圣十字山中的维索戈瑞和凯尔采单元,见Malinowski et al,2005)。这是因为不同年代和起源的地壳单元可能显示相同的岩石性质(而且仅靠P波速度不能对岩石类型做出很好的区分),其他精细尺度的特征,如近垂直的断层,就超出了广角反射/折射方法的分辨率范围。
(3)
(4)
本次扫描采用MS60仪器测角标称精度≤±0.5″,测距精度为2 mm±2 ppm,常规模式下最大测量距离为60 m。根据经验统计,该模式下全站仪实际测角精度一般为1.8″。现取S=60 m,mα=mαp=1.8,通过式(4)计算可得,u2=2.246 mm。
即点云平面坐标精度为
(5)
将u1、u2代入式(5),计算可得up=2.454 mm。
2.2 点云高程精度推算:
全站仪自由设站半测回观测4对CPⅢ控制点后,自由设站点H方向不确定度uH=0.7 mm[15],引入的标准不确定度分量u1,有
u1=uH=0.7 mm
全站仪在A点完成自由设站后,采用免棱镜模式测量构筑物点坐标,则任一点云高差为
hAP=SAPtanαA+iA-VP+fAP
(6)
式中,SAP为A、P两点间的距离;αA为竖直角观测值;iA为A点的仪器高;VP为P点的目标高;fAP为A、P两点间两差(地球弯曲差和大气折射差)改正。引入的标准不确定度分量u2,有
(7)

由于在计算棱镜中心的高程时,无需要量测仪器高和目标高,令仪器高miA、目标高mVP为0,有
(8)
点云高程综合精度为
(9)
将u1、u2代入式(9),计算可得uh=1.062 mm。
根据以上推算,当扫描设站满足X、Y、H三个方向小于0.7 mm的精度指标要求时,在30 kHz模式下点云坐标的平面及高程理论绝对精度分别为2.454 mm和1.062 mm。
3 工程案例
以青海省某高速运营铁路精测网复测项目为例,该线路2014年底开通运营,设计速度250 km/h,线路横穿祁连山山脉,实验段平均海拔约3 200 m,2022年1月受地壳运动影响该线路两处隧道变形严重,为了满足隧道及线路设计专业对构筑物变形分析的需要,优先完成复测线路范围内的精密工程控制网复测,在此基础上采用Leica MS60扫描仪完成长约16.3 km隧道洞内扫描作业,静态轨检小车完成长约17 km轨道线形测量。扫描及小车作业均使用本次精测网复测CPⅢ测量成果,通过对点云数据去噪、轨道中线坐标提取以及断面提取,并与静态小车测量结果进行对比分析。
3.1 作业效率分析
将MS60扫描仪与静态小车开展轨道线形测量在人员、设备以及单站用时等方面进行对比,结果见表2。
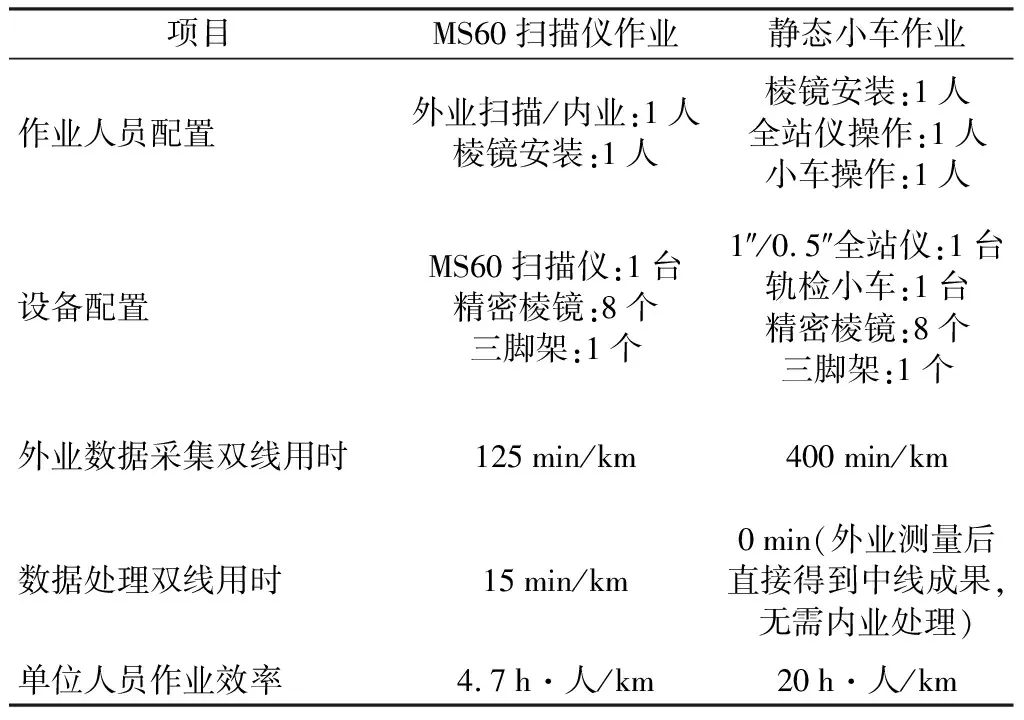
表2 三维扫描仪与静态小车作业效率及成本对比
由表2可知,采用MS60进行轨道中线测量,人员较小车作业减少1人,双线铁路扫描作业每千米用时140 min,相较于小车减少260 min,定义两种作业模式下每千米所用时间与人员数量为作业效率,三维激光扫描作业效率为4.7 h·人/km,相较于小车作业减少了25.3 h·人/km。三维激光扫描在人员、设备及效率方面远优于静态小车,在双线双轨线路作业时,MS60扫描仪优势将更加明显。
3.2 扫描仪设站精度分析
本次扫描共计完成414站外业扫描,其中大梁隧道扫描167站,祁连山隧道扫描247站,按照X、Y、H三个方向0.7 mm设站精度要求,对本次扫描外业设站精度进行统计,结果见图2。

图2 MS60扫描设站精度统计
由图2可知,本次外业扫描共计414站,以0.7 mm设站精度指标为合格,则X方向设站精度满足要求的为328站,合格率为79.23%;Y方向设站精度满足要求的为369站,合格率为89.13%;H方向设站精度满足要求的为352站,合格率为85.02%。结合现场实际分析,本次部分设站精度未达到0.7 mm的主要原因是在精测网复测和扫描作业期间,隧道未达到稳定,部分段落仍然存在轻微变形,导致扫描作业使用的CPⅢ成果与实际点位存在一定的偏移。
3.3 点云中线结果分析
对K1975+538~K1980+188里程范围,采用自主研发的点云中线提取软件按照20~50 m间隔进行中线提取,该软件可通过导入设计中线或者手动编辑中线概略位置,实现钢轨顶面点云自动搜索,从而计算得到线路左、右线的中线坐标。对点云提取到的中线坐标采用稳健平滑滤波方法处理[17],对异常值进行降权处理,当其大于6倍的平均绝对偏差时权重为0。
通过与静态小车在相同位置测量结果进行对比分析,具体方法为:先计算同一里程处三维激光扫描仪中线提取结果与静态小车测量中线坐标点间距,然后将点间距投影到线路横向方向,结果见图3。由图3可知,点云中线水平位置和静态小车测量中线基本吻合,横向偏差统一为正值,中线横向偏差平均值为2.7 mm,横向偏差最大值为13.0 mm,横向偏差最小值为0。
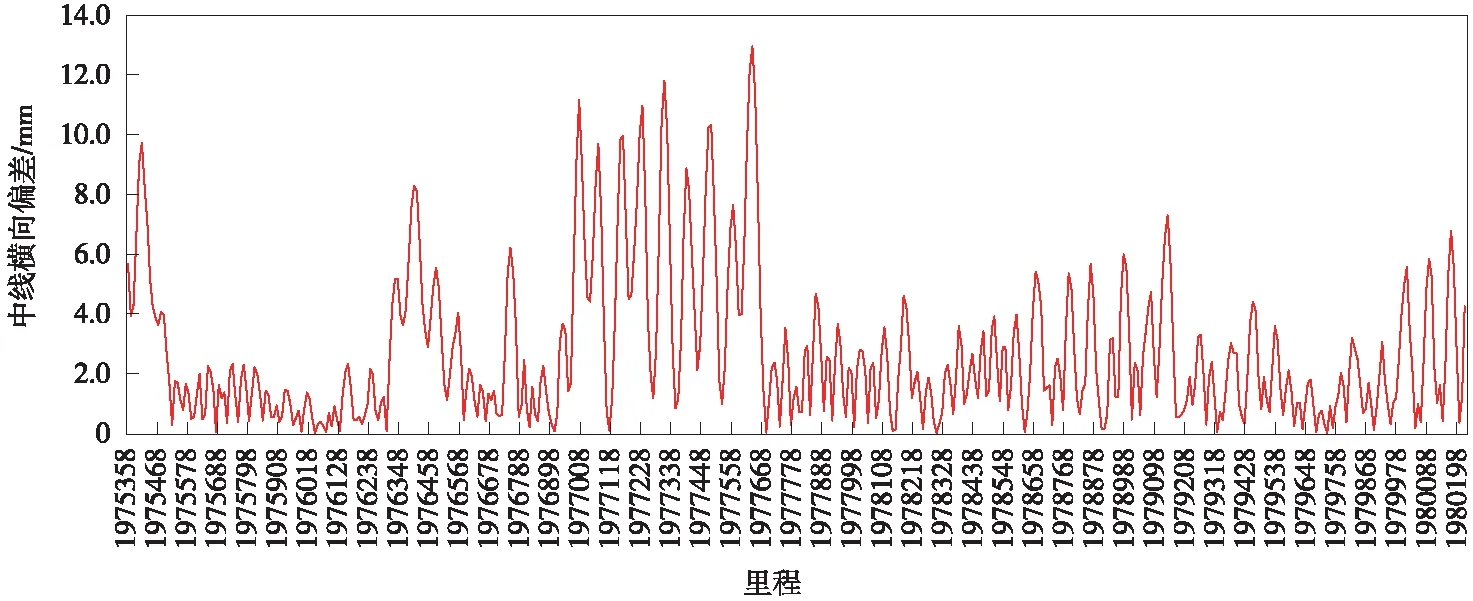
图3 点云提取中线与小车测量中线坐标横向偏差
假设静态小车测量结果为真值,根据精度推算,扫面仪点云坐标平面理论精度约为σ=±2.5 mm,取2σ限差(±5 mm)为上限,对横向偏差进行分布统计,结果见表3。由表3可知,横向偏差0~2.5 mm范围测点数为299个,占比为62%;横向偏差2.5~5 mm范围内测点数为112个,占比23%;0~5 mm范围内测点累计为411个,占比为85%;横向偏差大于10 mm的测点仅有11个,占比为2%。

表3 点云提取中线与小车测量中线坐标横向偏差结果分布统计
通过分析,造成横向结果偏差较大的主要原因有以下几点。
(1)轨道中线坐标是通过提取位于相同里程断面处左右钢轨顶面中间位置的点云坐标求平均值获得,由图4可知,由于钢轨顶面在车辆长期打磨下形成了近似镜面的反射面,导致钢轨顶面中部返回的点云数据十分稀疏;相邻测站中间位置处的点云见图5,此时点云最稀疏;距离测站较远处的点云见图6,此时点云相对稀疏;图7为图4的点云展点,此时在中间光滑处几乎没有点云。以上情况下均难以实现对钢轨中线的准确提取。

图4 钢轨顶面中间位置点云效果

图5 测站中间处钢轨顶面点云展点

图6 测站附近处钢轨顶面点云展点

图7 光滑钢轨顶面点云展点
(2)扫描仪部分设站精度无法满足0.7 mm的精度要求,导致点云坐标精度无法达到理论值。
同一里程处点云高程与小车高程较差见图8,点云间隔为0.5 m。高程较差在K1977+706处存在明显台阶,K1975+538~K1977+706段点云高程小于小车测量高程,高程较差统一为负值,区段内高程较差平均值为7.2 mm;由于点云扫描作业与小车作业存在时间差,作业期间存在地壳运动,推测高程较差在K1977+706处存在明显台阶是由地壳运动引起轨道变形造成。K1977+707~K1980+188范围内点云高程与小车测量高程的高程较差主要为正值,区段内高程较差平均值为0.5 mm;测区范围内高程较差绝对值平均值为3.9 mm,最大值为12.6 mm。

图8 点云提取中线与小车测量中线坐标高程较差
根据精度推算,扫面仪点云坐标高程理论精度σ=±1 mm,取2σ限差(即±2 mm)为上限,对横向偏差进行分布统计,结果见表4。

表4 点云提取中线与小车测量中线坐标高程较差结果分布统计
由表4可知,高程较差绝对值0~2 mm范围测点数为4516个,占比为49%;高程较差绝对值2~5 mm范围内测点数为766个,占比8%;高程较差绝对值5~10 mm范围内测点数为3471个,占比37%;0~5 mm范围内测点累计为5282个,占比为57%,高程较差大于10 mm的测点有548个,占比为6%。
通过分析造成高程结果偏差的主要原因有以下几点。
(1)点云扫描作业与小车作业存在时间差,期间隧道受外力影响存在一定的变形,导致两种方法测量结果存在一定差异。
(2)扫描仪作业时部分设站精度无法满足0.7 mm的限差要求,导致点云坐标精度无法达到理论值。
4 结论
基于自由测站三维激光扫描仪进行轨道线形测量,通过提取位于左右钢轨顶面的点云坐标计算得到轨道中线三维坐标。结合高速铁路工程测量规范及工程实例分析,提出扫描仪设站精度应小于0.7 mm,并通过公式推导,得到此条件下点云坐标的平面及高程理论绝对精度分别为2.454 mm和1.062 mm。
工程实例验证,通过点云中线坐标横向偏差和高程较差对比,MS60扫描仪点云中线与小车测量结果横向偏差平均值为2.7 mm,高程较差平均值为3.9 mm,其中K1977+707~K1980+188区段内平均值为0.5 mm。较差分布统计结果表明,MS60扫描仪点云结果稳定性较高,基于后方交会自由测站的三维激光扫描仪既可满足隧道构筑物监测的要求,又可满足轨道线形测量的要求。
猜你喜欢
福建中学数学(2023年4期)2024-01-10 06:12:47
中学生数理化·七年级数学人教版(2023年4期)2023-05-11 06:47:32
——书写要点(三)
学生天地(2018年33期)2018-11-08 08:38:12
学生天地·小学低年级版(2018年11期)2018-01-05 02:51:32
制造技术与机床(2017年8期)2017-11-27 02:10:22
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
中国铁道科学(2015年5期)2015-06-21 06:53:20
中国铁道科学(2015年4期)2015-06-21 06:46:04
现代营销·经营版(2015年3期)2015-04-20 06:46:58
中国铁道科学(2014年6期)2014-06-21 06:35:22
