
基于拓展计划行为理论的违规驾驶行为建模
2023-02-18 08:59:00王意东全洪钰王文迪何太碧
汽车实用技术 2023年3期
王意东,全洪钰,王文迪,何太碧
基于拓展计划行为理论的违规驾驶行为建模
王意东1,2,全洪钰1,2,王文迪1,3,何太碧1,2
(1.西华大学 汽车与交通学院,四川 成都 610039;2.汽车测控与安全四川省重点实验室,四川 成都 610039;3.成都工业学院 汽车与交通学院,四川 成都 611730)
为探究机动车驾驶员违规驾驶行为机理及其对后续驾驶行为的影响,编制了符合我国驾驶环境和驾驶特征的问卷量表,提炼了3个违规驾驶行为因子:习惯性违规(I1)、危险性违规(I2)、疏忽性违规(I3)。在计划行为理论的基础上增加了“违规驾驶行为”“后续驾驶行为”和“执行意向”三个变量,构建了基于拓展计划行为理论(EX-TPB)的违规驾驶行为结构方程模型。结果表明,该模型对分析违规驾驶行为的影响机理具有很好的解释能力和预测能力;行为态度(AT)和主观规范(SN)对驾驶员安全驾驶行为意向的影响不显著,知觉行为控制(PBC)与违规驾驶行为(IDB)对执行后续安全驾驶行为意向(BI)有正向显著影响,执行意向(EI)是行为意向转化为实际行为的中介变量,并且提升了对后续安全驾驶行为的解释力;经驾驶信息差异性分析,可知实际驾龄越高的驾驶员在习惯性违规和疏忽性违规方面有显著差异,每周驾驶频率越高的驾驶员更容易导致习惯性违规和疏忽性违规,1年内发生3次及以上违规被罚的驾驶员对被罚0~2次的驾驶员有更高的疏忽性违规倾向。
交通安全;违规驾驶行为;EX-TPB;结构方程模型;执行意向;驾驶行为矫正
随着经济的发展,我国机动车保有量和机动车驾驶人快速增加,机动车给人们带来方便的同时,也引发了很多交通事故。研究表明[1-4],人是导致交通事故的关键性因素。某学者统计了2.8万起交通事故,发现与人相关的因素高达96.4%,其中,因驾驶员违规驾驶导致的交通事故占74%[5]。
违规驾驶行为(Illegal Driving Behavior, IDB)在我国机动车驾驶员中普遍存在,是指驾驶员在行车过程中下意识或无意识地影响其他交通参与者,危害自身和他人安全的不安全驾驶操作习惯或违法驾驶操作行为等。
通过文献查新,国外对违规驾驶行为进行了相关研究。REASON等人[6]制作了著名的曼彻斯特驾驶行为问卷,从中总结了三大违规驾驶行为因子;BOLLEN等人[7]对违章的驾驶员和安全驾驶员采用16PF量表测试,分析了两者的驾驶行为倾向和心理特点;LAJUNEN等人[8]通过对部分欧洲国家驾驶员进行研究,分析了驾驶行为问卷(Driver Behavior Questionnaire, DBQ)对多种文化的实用性;MASLA等人[9]提出了“事故倾向性理论”,认为部分人的某些个性特征跟交通事故具有较大的相关性;ELANDER等人[10]认为驾驶行为与人格体质、驾驶态度和信念相关。
国内学者对违规驾驶行为的研究,主要集中在违规驾驶行为视觉识别检测方法[11]、非机动车驾驶人违规驾驶心理行为[12-15]、违规驾驶行为法律规范制度[16]、违规驾驶定性描述等。对其他驾驶行为的研究,则集中在进攻性[17-18]、防御性[19]、竞争性[20]以及疲劳驾驶[21]等不安全驾驶行为。
因此,国内外对违规驾驶行为的研究依然较少。国外偏向于驾驶行为量表结构、人格特质与驾驶行为的关联性、驾驶行为性格倾向及心理活动等研究,国内则偏向于某一特定不安全驾驶行为的研究,缺乏专门针对机动车违规驾驶行为的影响机理及其对后续驾驶行为影响的相关研究。本文结合前人的研究基础,编制了符合我国驾驶特征和交通环境的调研问卷,构建了基于拓展计划行为理论(Extended Theory of Planned Behavior, EX-TPB)的结构方程模型(Structural Equation Model, SEM),系统、定量分析违规驾驶行为的影响机理及其对后续驾驶行为的影响。
1 研究理论及方法
本文利用计划行为理论(Theory of Planned Behavior, TPB)[22-24],构建了违规驾驶行为的SEM模型。模型变量中,行为态度(Behavioral Attitude, AT)体现了驾驶员对违规驾驶行为的评价;主观规范(Subjective Norm, SN)体现了社会压力对违规驾驶行为的影响;知觉行为控制(Perceived Behavioral Control, PBC)体现了驾驶员对违规驾驶行为的控制力;行为意向(Behavior Intention, BI)体现了驾驶员在SN、AT、PBC等影响下会采取的行为意愿强度。为探究驾驶员违规驾驶行为的影响因素,新增了违规驾驶行为变量。同时,为探索过去违规驾驶行为对后续安全驾驶行为的影响程度,以及驾驶员驾驶行为改变的影响因素,本文还增设了后续驾驶行为(Follow-up Driving Behavior, FDB)及执行意向行为(Executive Intention, EI)两个解释变量,以此构建了基于拓展计划行为理论的违规驾驶行为理论模型,如图1所示。
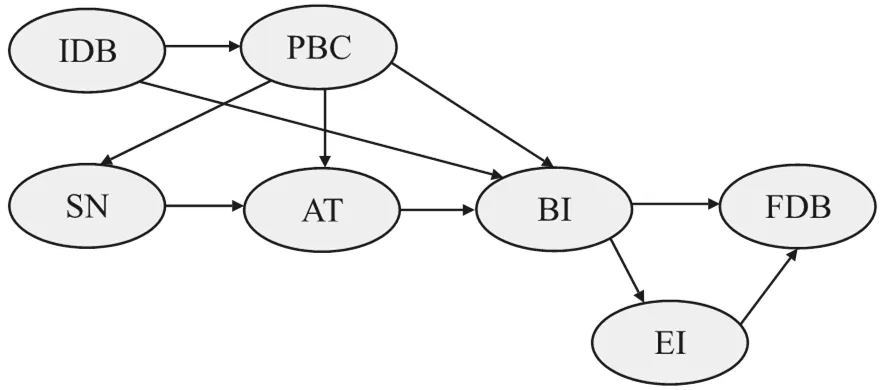
图1 基于拓展计划行为理论的违规驾驶行为结构方程模型
2 问卷设计及收集
2.1 问卷设计
本次研究采用问卷调查法,问卷包括驾驶行为量表和计划行为量表两部分。其中,驾驶行为量表包括驾驶员个人基本信息(驾龄、驾驶频率、计分周期内的违规驾驶和扣分情况等)、违规驾驶行为(IDB)量表、驾驶技术(Driving Skill, DS)量表、风险意识(Risk Awareness, RA)量表等。IDB量表包括习惯性违规I1、危险性违规I2、疏忽性违规I3三个因子构面,共计16个题项。计划行为量表包括主观规范、行为态度、知觉行为控制、行为意向、执行意向等五个构面共19个题项,如表1所示,所有题项采用5级李克特计分形式,无论是正向计分还是反向计算分值,分值越高表示被调查驾驶员的违规倾向水平越高,分数越低则遵守交通规则的可能性越高。

表1 计划行为量表设计说明
2.2 问卷收集
本问卷调查采用网络调查法(问卷星),调查对象为机动车(汽车)驾驶员,整个调查过程于2021年3月结束。由于问卷题项较多,为提高问卷数据有效性,主要针对微信及QQ朋友圈、校内办公系统中结识的具有有效驾驶经历的亲朋好友发放调查问卷,并通过答题时间、反向题、同一IP地址不能重复答题、未答完题项不能提交等措施剔除无效问卷。本次调查共回收问卷605份,有效问卷528份,有效率约为87%。
2.3 量表检验
为保证问卷质量可靠性,需对问卷进行内部一致性分析,检验的标准为题项的总相关系数(Corrected Item Total Correlation, CITC)≥0.4,Cronbach≥0.7,经验证,驾驶行为量表及计划行为量表各构面均满足可靠性要求。
经探索性因子分析,IDB量表所包含的习惯性违规I1、危险性违规I2、疏忽性违规I3三个因子构面所有观测变量在各自潜在变量上的因子载荷均大于0.5,潜在变量具有很好的建构效度。
3 违规驾驶行为差异性分析
3.1 驾龄信息对违规驾驶行为的影响
表2为驾龄对违规驾驶行为的单因素方差分析。表3为实际驾龄在3个构面上的图基法事后检验结果。从表2可知,驾驶员的实际驾龄对I1(习惯性违规;=5.579,<0.001)、I3(疏忽性违规;=5.563,<0.001)、两个构面的影响均有显著性差异,对I2(危险性违规)没有显著差异。
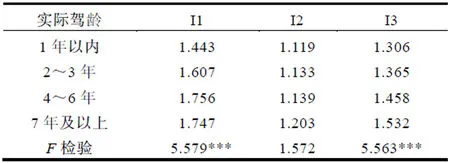
表2 驾龄在各构面的平均分值
注:*表示平均值差值的显著性水平为0.001。

表3 实际驾龄对I1、I3的多重比较(图基)
注:*表示平均值差值的显著性水平为0.05。
从表3可知,(1)实际驾龄在4年以上的驾驶员平均得分比1年以内的驾驶员更高,同时达到显著水平。也就是说随着驾龄的推移,高驾龄机动车驾驶员在驾驶过程中比新手驾驶员更容易出现习惯性违规的操作。这是由于长期的驾驶习惯没有得到及时纠正或改善,容易将部分驾驶习惯保留,甚至形成肌肉记忆,最终从心理上认为该操作与违规无关。(2)在I3(疏忽性违规)方面,7年及以上驾龄的驾驶员平均得分更高,相比驾龄在1~3年的驾驶员达到显著水平。说明驾龄越高越可能疏忽部分交通规则,尤其在驾龄达到7年之后更为明显。
3.2 驾驶频次对违规驾驶行为的影响
表4为驾驶员每周开车频率对违规驾驶行为的单因素方差分析。图5为每周驾车频率在3个构面上的图基法事后检验结果。由表4可知,每周开车频率对I1(习惯性违规;=5.579,<0.001)、I3(疏忽性违规;=5.563,<0.001)两个因素的影响均有显著性差异,对I2(危险性违规)没有显著差异。

表4 每周驾龄频率在各构面的平均分值
注:*表示平均值差值的显著性水平为 0.05。
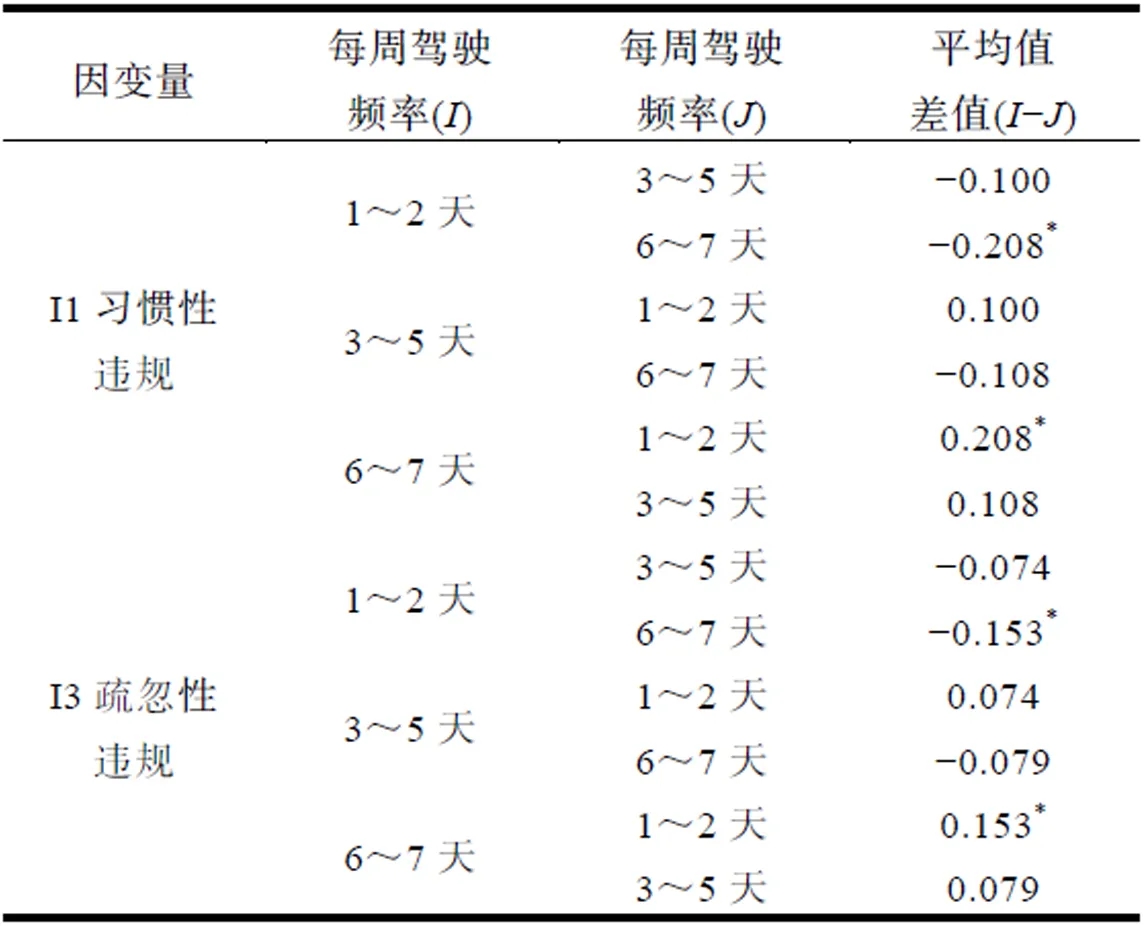
表5 驾驶频率对I1、I3的多重比较(图基)
注:*表示平均值差值的显著性水平为 0.05。
由表5可知,(1)驾驶频率每周在6~7天的驾驶员相对于频率在1~5天的驾驶员的违规概率更高,其中对于1~2天的驾驶员差异显著。由于驾驶经验更丰富、驾驶时间更长、频率更高导致驾驶过程中习惯性地违规操控车辆。(2)在I3构面上驾驶频率的结果和I1几乎一致,驾驶频率越高越可能导致驾驶员的疏忽性违规。
3.3 违规次数对违规驾驶行为的影响
表6为近1年内违规次数对违规驾驶行为的单因素方差分析。表7为违规次数在3个构面上的图基法事后检验结果。由表6可知,驾驶员的驾驶违规和事故信息几乎对所有构面的影响有呈显著性差异。

表6 驾驶信息在各构面的平均分值
注:**代表平均值差值的显著性水平为0.01。
由表7可知,(1)“违规被罚次数”在I1和I3构面有相同的显著性表现,发生3次及以上的驾驶员在习惯性违规驾驶和危险驾驶两个方面比发生0~2次的驾驶员有更高的倾向。也就是说违规被罚次数的多少反映了驾驶员对交通规则的遵守程度,且为正相关。(2)在I2构面,发生3次及以上驾驶员对0~2次的驾驶员有更高的疏忽性违规倾向。1~2次驾驶员虽然平均值得分高于0次驾驶员,但结果不显著。

表7 被罚次数图基法多重比较
注:*代表平均值差值的显著性水平为0.05。
4 模型构建及评价
4.1 模型假设
为研究机动车驾驶员违规驾驶行为的影响机理,以及过去违规驾驶行为对后续安全驾驶行为的影响程度,提出以下假设:
H1:驾驶员过去违规驾驶行为对后续驾驶行为意向有显著影响;
H2:驾驶员过去违规驾驶行为对知觉行为控制有显著影响;
H3:驾驶员违规驾驶行为态度对后续驾驶行为意向有显著影响;
H4:驾驶员知觉行为控制对后续驾驶行为意向有显著影响;
H5:驾驶员知觉行为控制对主观规范有显著影响;
H6:驾驶员知觉行为控制对驾驶行为态度有显著影响;
H7:驾驶员驾驶行为意向对后续驾驶行为有显著影响;
H8:驾驶员主观规范对后续驾驶行为意向有显著影响。
4.2 模型构建及参数估计
本文观测变量分布情况符合极大似然法分布,故采用极大似然法验证其结构方程模型的适配度,并对参数进行标准化处理。结合上述假设,经标准化处理和修正后,在AMOS24.0中构建了基于拓展计划行为理论的SEM模型路径图,如图2所示。
4.3 适配评价
SEM模型适配度评价是用来评估模型与数据的拟合程度,通常用以下指标进行判断,如表8所示。模型经过适配度修正后,各指标均满足标准,说明样本数据与模型间能进行较好的拟合,模型适配度较好。

表8 修正后的模型适配度检验表
4.4 假设验证
基于EX-TPB的违规驾驶行为SEM模型修正与适配度评价结果,对4.1中的假设进行检验,检验结果如表9所示。
由表9可知,H1、H2、H4、H5、H6、H7的路径系数检验<0.001,假设成立。驾驶员违规驾驶行为态度(AT)对后续驾驶行为意向(BI)没有显著影响(>0.05)。同样,驾驶员主观规范(SN)对后续驾驶行为意向(BI)也没有显著影响(>0.05)。H3、 H8假设不被支持,检验结果如表10所示。

图2 违规驾驶行为EX-TPB结构路径图
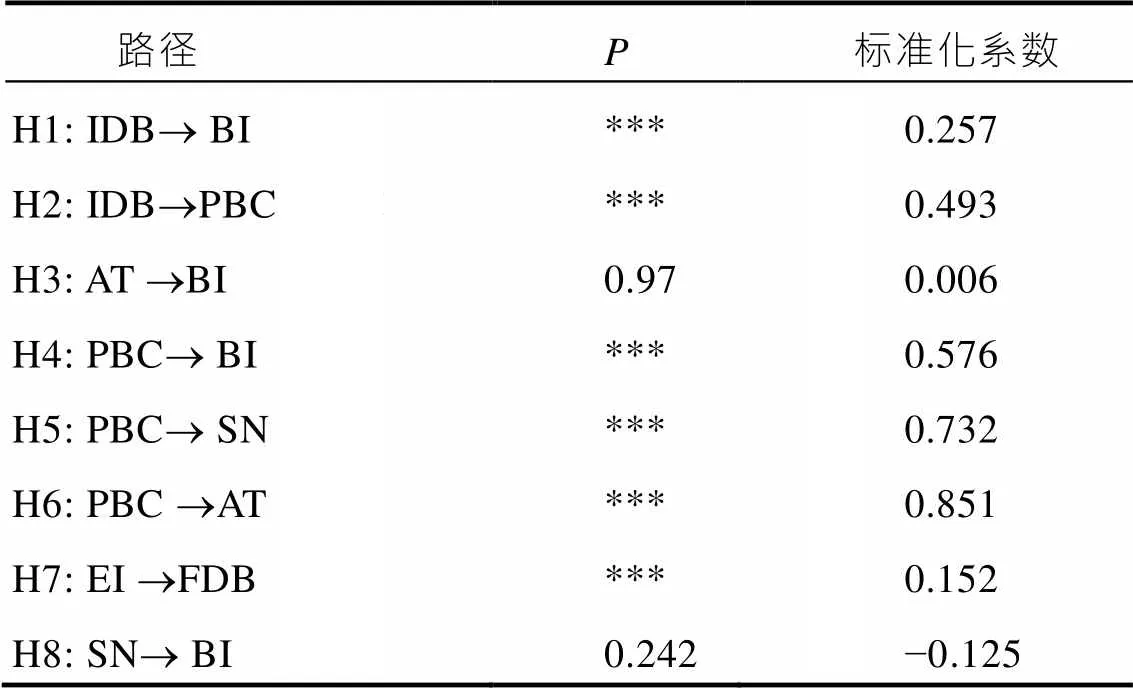
表9 路径系数检验
注:***表示显著水平达到0.001水平。
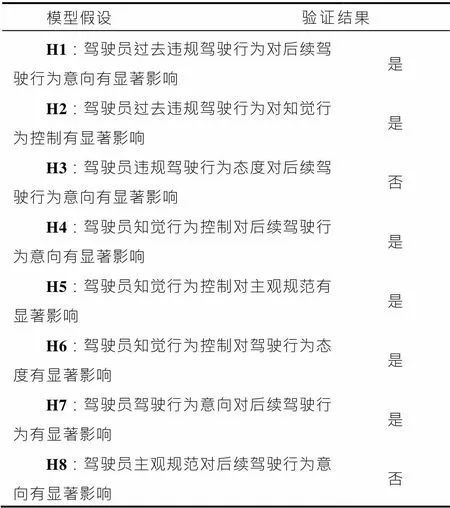
表10 模型假设验证结果分析
4.5 模型结果分析
通过4.1—4.4可知,行为态度、主观规范、知觉行为控制以及过去违规驾驶行为能够较有效地预测驾驶行为意向;加入了过去违规驾驶行为与执行意向两个构面的EX-TPB模型解释了44%的驾驶员行为意向及21%的后续驾驶行为,增强了对驾驶员驾驶行为意向和后续驾驶行为的解释力;知觉行为控制及过去违规驾驶行为对后续安全驾驶行为意向产生正向影响,执行意向是行为意向影响驾驶员参与后续安全驾驶行为的中介变量,即形成了安全驾驶行为执行意向的驾驶员更有可能矫正或者规范自身的驾驶行为,将其行为意向的转化实现自动化,从而提升驾驶员行为意向转变为安全驾驶行为的转化率,改善TPB模型中存在行为意向和行为不一致的弊端,最终降低道路交通事故的发生率,提升了对后续安全驾驶行为的解释力。
5 结论
将过去违规驾驶行为、执行意向以及后续驾驶行为加入TPB模型,构建基于EX-TPB的SEM 模型。通过研究,可得到以下结论:
(1)实际驾龄越高的驾驶员在习惯性违规和疏忽性违规方面有显著差异;对每周驾驶频率越高的驾驶员更容易导致习惯性违规和疏忽性违规;违规被罚次数的多少反映了驾驶员对交通规则的遵守程度,且为正相关,1年内发生3次及以上违规被罚的驾驶员对被罚0~2次的驾驶员有更高的疏忽性违规倾向。
(2)行为态度和主观规范对驾驶员执行安全驾驶行为意向的影响不显著;知觉行为控制与过去违规驾驶行为均对执行安全驾驶行为意向有正向显著影响;执行意向是行为意向转化为实际行为的中介变量,并且提升了对后续安全驾驶行为的解释力。
今后需要进一步研究的问题:(1)针对不同类型机动车,进一步细化驾驶员群体,以此建立结构方程模型,对比分析不同群体的违规驾驶行为特点;(2)后续还需进一步研究是否有其他因素对后续驾驶行为意向有显著影响,以提高模型的适用性。
[1] 陈明伟,袁晓华,潘敏,等.从道路交通事故统计分析对比谈预防措施[J].中国安全科学学报,2004,14(8): 62-66.
[2] 张丽霞,刘涛,潘福全,等.驾驶员因素对道路交通事故指标的影响分析[J].中国安全科学学报,2014,24 (5):79-84.
[3] 张迪.北京市区道路交通事故致因分析与安全对策[D].焦作:河南理工大学,2012.
[4] 于影霞,曾致桓,龙丹.基于事故树分析的货运驾驶员失误研究[J].华东交通大学学报,2018,35(21):55-62.
[5] 毕建彬.道路交通事故的人因分析与驾驶员可靠性研究[D].北京:北京交通大学,2012.
[6] REASON J T,MANSTEAD A S R,STRADLING S, et al. Errors and Violations on the Roads[J].Ergonomics, 1990, 33(10):1315-1332.
[7] BOLLEN K A,LONG J S.Testing Structural Equation Models[M].Kingdom:Sage Publications,1993,136-162.
[8] LAJUNEN T,PARKER D,SUMMALA H.The Manch- ester Driver Behaviour Questionnaire:A Cross-cultural Study[J].Accident Analysis Prevention,2004,36(2): 231-238.
[9] MASLA M,ANTI B,LIPOVAC K,et al. Behaviours of Drivers in Serbia: Non-professional Versus Professi- onal Drivers[J].Transportation Research Part F:Traffic Psychology and Behaviour, 2018,52:101- 111.
[10] ELANDER J,WEST R,FRENEH D.Behavioral Correl- ates of Individual Differences in Road Traffic Rash Risk:An Examination of Methods and Findings[J]. Psychol Bull,993,113(2):279-294.
[11] 高尚兵,黄子赫,耿璇.视觉协同的违规驾驶行为分析方法[J].智能系统学报,2021,16(6):1158-1165.
[12] 李泽群.营运非机动车驾驶人违规驾驶心理与行为研究[J].交通工程.2021,21(1):63-69.
[13] WANG C,ZHANG W H,FENG Z X,et al.Aberrant Behaviours in Relation to the Self-reported Crashes of Bicyclists in China:Development of the Chinese Cycling Behaviour Questionnaire[J].Transportation Research Part F:Traffic Psychology and Behaviour, 2019,66:63-75.
[14] QIAN Y N,SUN Q N, FEI G Q, et al. Riding Behavior and Electric Bike Traffic Crashes:a Chinese Case- control Study[J].Traffic Injury Prevention,2020,21: 24-28.
[15] TANG T P,GUO Y T, ZHOU X Z, et al. Under- standing Electric Bike Riders’ Intention to Violate Traffic Rules’ and Accident Proneness in China[J]. Travel Behaviour and Society, 2021,23:25-38.
[16] 董潇.高危驾驶行为的刑法规制问题[D].上海:华东政法大学,2010.
[17] 骆勇.道路交通中攻击性驾驶行为分析与研究[D].成都:西南交通大学,2009.
[18] 李晓晨,常若松,马锦飞.攻击性驾驶行为的综合模型[J].心理科学与研究,2019,27(4):748-760.
[19] 高红丽,高丽英,范双双.基于计划行为理论的防御性驾驶行为意向分析模型[J].公路交通科技,2020,37 (3):137-144.
[20] 李鹏飞,石建军,刘小明.基于计划行为理论的竞争驾驶行为建模[J].公路运输系统工程与信息,2016,16 (1):92-98.
[21] 史晨军,邓院昌,林庆丰,等.基于扩展计划行为理论的驾驶员疲劳驾驶行为心理影响因素分析[J].安全与环境工程,2018,25(6):94-99.
[22] FISHBEIN M,AJIZEN I.Belief, Attitude, Intention and Behavior: An Introduction to Theory and Research [M].Ottawa:Addison-Wesley Publishing Company, 1975.
[23] 苑风霞.基于计划行为理论的驾驶行为模型研究[D].西安:长安大学,2011.
[24] 闫岩.计划行为理论的产生发展和评述[J].国际新闻界,2014,36(7):113-129.
Modeling of Illegal Driving Behavior Based on Extended Theory of Planned Behavior
WANG Yidong1,2, QUAN Hongyu1,2, WANG Wendi1,3, HE Taibi1,2
( 1.School of Automobile & Transportation, Xihua University, Chengdu 610039, China;2.Key Laboratory of Sichuan Provincial Vehicle Measurement, Control and Safety, Chengdu 610039, China;3.School of Automobile & Transportation, Chengdu Technological University, Chengdu 611730, China )
In order to study the mechanism of motor vehicle drivers' illegal driving behavior and its impact on subsequent driving behavior, combined with China's current driving environment, a questionnaire conforming to China's driving environment and driving characteristics is compiled, and three illegal driving behavior factors are refined: habitual violation (I1), dangerous violation (I2) and negligent violation (I3).On the basis of planned behavior theory, three variables of “execution intention”, “subsequent driving behavior” and “follow-up driving behavior scale” are added, and a structural equation model of illegal driving behavior based on extended theory of planned behavior (EX-TPB) is constructed. The results show that: the model has good explanatory ability and predictive ability for analyzing illegal driving behavior. Behavioral attitude (AT) and subjective norm (SN) have no significant influence on drivers' behavioral intention to execute safe driving. Both perceived behavioral control (PBC) and illegal driving behavior (IDB) have a positive effect on the intention to execute subsequent safe driving behaviors, and the results are significant. Safe driving behavior intention (BI) has positive influence on subsequent safe driving behavior. Executive intention (EI) is the intermediary variable of behavioral intention into actual behavior, and improves the explanatory power of subsequent safe driving behavior; the difference by the driving of information analysis shows that the higher the actual driving experience of the pilot in the habitual violations and negligence sexual abuses have significant differences, weekly driving frequency, the higher the drivers are more likely to lead to habitual violations and negligent violation, is punished for violation occurred three times in a year or more drivers to be fined 0 to 2 times the driver has a higher tendency of negligence sexual violation.
Traffic safety; Illegal driving behavior; EX-TPB; Structural equation model; Execution intention; Driving behavior correction
X951
A
1671-7988(2023)03-191-07
10.16638/j.cnki.1671-7988.2023.03.036
王意东(1987—),男,高级实验师,研究方向为汽车运用工程的科研及教学,E-mail:wydzn1125@mail.xhu. edu.cn。
四川省创新创业项目(S202010650103)。
猜你喜欢
智能建筑与智慧城市(2022年3期)2022-03-23 12:39:46
猪业科学(2021年3期)2021-05-21 02:05:38
黑龙江科学(2020年22期)2020-11-13 10:02:14
时代邮刊(2020年3期)2020-02-27 09:17:18
活力(2019年19期)2020-01-06 07:35:50
科技创新导报(2017年3期)2017-04-13 10:28:15
中国修辞(2017年0期)2017-01-31 05:41:04
校园英语·上旬(2016年11期)2016-07-04 23:42:31
车迷(2016年4期)2016-05-14 02:17:17
湘潭大学学报(哲学社会科学版)(2014年6期)2014-02-28 19:52:27
