
基于对抗域自适应的轴承剩余使用寿命预测方法
2023-02-16 11:59徐娟蒋瑞陈为伟王东峰郑昊天
轴承 2023年2期
徐娟,蒋瑞,陈为伟,王东峰,郑昊天
(1.合肥工业大学 a.计算机与信息学院;b.机械工程学院,合肥 230009;2. 上海航天控制技术研究所,上海201109;3.洛阳轴研科技有限公司,河南 洛阳 471003 ;4.洛阳轴承研究所有限公司,河南 洛阳 471039)
轴承作为旋转机械的重要组成部件,对许多工业机器的正常运行至关重要,其工作状况是否正常对整个装置的性能有很大影响[1],一旦轴承发生疲劳破坏导致失效,会直接影响整个设备的运行,从而影响工业生产以及生命财产安全。轴承的可靠性分析和剩余使用寿命(Remaining Useful Life,RUL)预测至关重要,是当前自动化发展的要求和趋势[2];然而,由于轴承材料、工况的影响,轴承的使用寿命会表现出不同的退化特点[3],准确预测轴承剩余使用寿命是待解决的难题。
大多数深度学习解决滚动轴承剩余使用寿命预测问题均是基于以下假设:足够多的数据样本,训练集与测试集的数据分布保持一致[4]。然而在实际工况中,滚动轴承退化失效过程可能需要几个月甚至几年,收集滚动轴承全寿命周期的数据成本较高;轴承的运行状态易受其载荷和转速等因素的影响,振动信号的分布也会受到影响[5]:因此,同一轴承模型即使在相同的工况下,其退化过程可能具有不同的数据分布特征,轴承训练数据与预测数据之间的数据分布偏差会导致剩余使用寿命预测精度的下降。
迁移学习下的领域自适应方法能有效解决数据分布差异带来的预测精度下降问题。领域自适应方法适用于源任务与目标任务相同但源域与目标域中数据分布不一致的情况,通过此方法可以从大量带标签的源域样本中学习到需要的知识,并将这些知识迁移到目标域中,从而解决不同数据分布的寿命预测问题。
目前,基于域自适应的剩余使用寿命预测研究取得了丰硕成果:文献[6]利用来自目标域的标记数据提出了一种监督域适应方法,旨在微调在源域上训练的双向长短期记忆(Bi-directional Long Short-Term Memory,Bi-LSTM)网络,但需要目标标记的剩余使用寿命数据,并且不会针对常见的特征表示进行优化;文献[7]针对训练数据和测试数据分布不同,解决领域转移问题的传统方法,试图获得领域不变特征,提出了一种基于对比对抗域自适应的跨域剩余使用寿命预测方法,但未能考虑目标特定的信息;文献[8]提出了一种基于动态领域自适应(Dynamic Domain Adaptation,DDA)的机械设备多工况剩余使用寿命预测方法;文献[9]将领域对抗神经网络模型与Bi-LSTM网络相结合,对滚动轴承剩余使用寿命进行了估计;文献[10]提出了一种新的基于域自适应LSTM-DNN网络的滑动轴承剩余使用寿命预测方法,通过模糊C均值聚类算法提取多传感器特征和确定退化发生时间,将提取的多传感器特征用于退化评估。
现有领域自适应方法在应用到轴承剩余使用寿命预测中往往考虑轴承全生命周期数据的分布差异,然而轴承振动早期数据波动较小,快速退化阶段数据才能更好地反映轴承的退化特性,用全生命周期数据进行领域自适应可能会出现负迁移的现象。
针对上述分析,结合深度领域自适应方法,本文提出了一种基于对抗域自适应的轴承剩余使用寿命预测方法。并通过不同工况下轴承疲劳寿命试验的振动数据对比验证本模型的剩余使用寿命预测效果。
1 领域自适应方法
领域自适应方法大体可以分为3种:
1)特征选择法。该方法基于源域与目标域数据具有某些相同特征的假设,目标是找出这些公共特征,并以找到的公共特征为基础构建模型。代表性的方法为结构对应学习(Structural Correspondence Learning,SCL)法[11]。
2)数据分布自适应方法。该方法着眼于源域和目标域的数据分布,利用若干转换手段使数据在源域与目标域之间的差异最小。具体可分为边缘分布自适应[12]、条件分布自适应[13]以及将两者结合的联合分布自适应[14]。本文方法属于此种方法。
3)子空间学习法。该方法的基本假设是源域与目标域数据在当前空间维度上的相似性不明显,利用子空间学习将2个域的数据变换到一个低维的公共子空间中,从而学习到源域和目标域数据的域不变特征[15]。
2 基于对抗域自适应的剩余寿命预测方法
2.1 域适应问题定义

本文模型分为2个部分:健康阶段划分模块,使用一种基于等渗回归[16]的退化数据预处理方法去除原始退化数据中的随机波动,并识别轴承数据的退化点,截取快速退化阶段数据;基于对抗域自适应的进行剩余使用寿命预测。模型整体结构如图1所示。

图1 基于对抗域自适应的轴承剩余使用寿命预测模型
2.2 基于等渗回归的轴承健康阶段划分
2.2.1 等渗回归算法流程
令y(t)为时间t下的累计退化路径,y(0)=0,所有监测时间点与对应的退化测量值分别为ti={t1,t2,…,tk}和yi={y1,y2,…,yk},i=1,2,…,k。
等渗回归假设最能代表数据趋势的函数是单调的,因此提供了线性回归的替代方法,对数据拟合为分段常数非递减(阶梯状)的函数。
原始退化数据经常呈现随机波动,采用等渗回归可以消除这些波动,使退化过程呈现单调趋势。等渗回归定义为:令X为一个有限集{x1,x2,…,xk}和x1≪x2≪…≪xk,假设f是X的给定函数,那么函数f*为f的等渗回归,权重为ω。
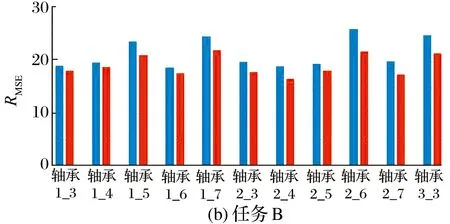
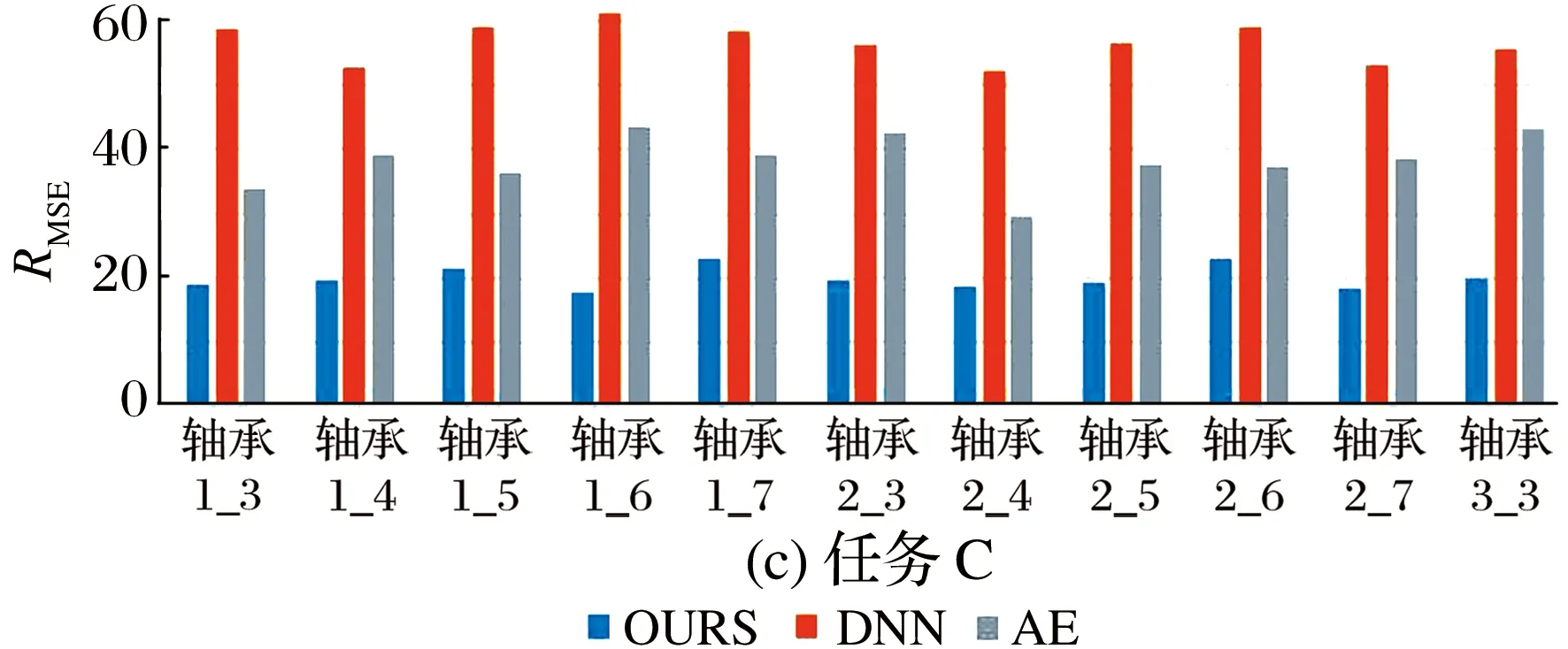
对于原始退化数据(ti,yi),i=1,2,…,k,监测时间点有一个简单的顺序,即t1 1)若f是等渗的,那么f*=f。 2)若存在某个时刻i,f(xi-1)>f(xi),将这2个值替换为其加权平均值A,即 (1) 2个权重ω(xi-1)和ω(xi)均被替换成ω(xi-1)+ω(xi)。 3)若这组新的k-1值是等渗的,使 f(x1)≪…≪f(xi-2)≪A{i-1,i}≪ …≪f(xk), (2) f*(xi-1)=f*(xi)=A{i-1,i}, f*(xj)=f(xj)。 4)若这组新值不是等渗的,则使用新值和权重值重复上述过程,直到获得一组等渗值。使用PAVA可以对原始退化数据进行预处理,直到变成等渗数据。最终处理结果如图2所示,有许多跳跃点。 图2 PAVA预处理后的退化数据示意图 2.2.2 退化点识别 由图2可知,在第1个跳跃点开始退化时,前几个跳跃点的幅度可能非常小,在此阶段仍然处于健康阶段。采用单位时间的退化增量确定退化阶段的变化点,即当单位时间的增量超过了给定的阈值Δ,轴承开始进入快速退化阶段(即检测出退化点)。为此,构建了一个包含n个退化数据点的滑动窗口,即 (3) 线性回归模型y*为 y*=Δi·t+ω, (4) 式中:Wi为长度为n的滑动窗口;y*为yi等渗回归算法后的测量值;Δi为窗口的退化梯度;t为退化时间点。 在滑动窗口上进行拟合,Δi使用最小二乘法计算,即 (5) 对每个窗口,将Δi与Δ进行比较,如图3所示,当Δi≤Δ时,振动数据被判定为健康阶段数据,然后通过合并新的退化数据更新滑动窗口,并重复此过程直到Δi>Δ。此时,Wi的第1个时间点,即滑动窗口的左侧,被确定为退化点。 图3 退化点识别的滑动窗口示意图 识别出每套训练轴承和测试轴承的退化点,并截取退化点后的快速退化阶段数据作为基于对抗域自适应剩余使用寿命预测方法的输入。 在使用对抗域自适应前需使用“最小-最大规范化方法”对快速退化阶段的轴承振动信号进行预处理,使处理后的全部数据为0~1。最小-最大规范化方法对原始数据进行线性变换,同时依然保持原始数据之间的潜在联系。 快速退化阶段的振动信号数据为V={v1,v2,…,vi,…,vN},vi为快速退化阶段的第i个时间点。对快速退化阶段数据进行变换得到数据X={x1,x2,…,xi,…,xN}。最小-最大规范化方法的公式为 (6) 式中:xi为快速退化阶段进行最小-最大规范化方法变换后的第i个数据。 本文提出了一种对抗域自适应(Adversarial Domain Adaptation,ADA)方法,通过源域和目标域的对抗训练学习目标域数据的域不变特征,进而在目标域下实现满意的剩余使用寿命预测。 2.3.1 预训练过程 1)特征提取器 长短期记忆(Long and Short Term Memory,LSTM)网络作为循环神经网络(Recurrent Neural Network,RNN)的强大变体,可以用来处理时间序列数据长期依赖关系,并避免了梯度消失和梯度爆炸等问题。本文使用一个深度LSTM网络,其具有3个连续的网络层,能够自动提取轴承振动数据中反映退化趋势的特征。为防止过拟合,在每层LSTM网络后加了Dropout层。 2)剩余使用寿命预测模块 剩余使用寿命预测模块是一层门控循环单元。RUL预测器R和特征提取器ES使用预测RUL值与真实RUL值之间的均方误差(Mean Squared Error,MSE)损失以端到端的方式进行训练,可以形式化为 (7) 2.3.2 对抗域自适应 对抗域自适应模块主要由源特征提取器ES、目标特征提取器ET、域判别器D组成。采用训练好的源特征提取器的权重初始化目标特征提取器。首先,将源域和目标域的输出特征输入到对抗性判别器网络中,以最小化源域和目标域数据的差异;然后,将源域带标签的数据和目标域无标签的数据经过特征提取后输入到域判别器中。域判别器包含2个全连接层和1个输出层,因为目标域数据没有标签,所以不可能在目标域上直接进行有监督学习。本文使用预训练的源特征提取器ES和源寿命预测模块RS分别初始化目标特征提取器ET和目标寿命预测模块RT的参数。域判别器D被训练用来区分源特征fS和目标特征fT。同时,训练目标特征提取器ET以产生目标特征,使域判别器无法将它们与源特征区分开。域判别器D与目标特征提取器ET之间的对抗训练为 EXT~PT[log (1-D(ET(XT)))], (8) 式中:XS和XT分别为源域和目标域样本;EXS~PS[logD(ES(XS))]为通过最小化Ladv损失来更新目标特征提取器ET的参数;EXT~PT[log(1-D(ET(XT)))]为通过对抗训练的方式,最大化Ladv损失来更新域判别器D的参数。最终,训练后的目标特征提取器ET能够提取与源域特征差异最小的目标特征fT。 综上所述,基于域自适应的轴承剩余使用寿命预测算法训练过程定义为:输入源域数据DS以及目标域数据DT,并从中各选取m个样本;利用源域数据预训练源特征提取器ES,将ES的参数初始化到目标特征提取器ET,提取源域样本以及目标域样本的特征fS=ES(XS)和fT=ET(XT);根据(8)式对抗性损失更新域判别器D以及ET,再使用更新后的ET提取目标域数据特征;用RUL预测模块预测目标域的剩余使用寿命。 本试验采用的是IEEE PHM Challenge 2012轴承数据,在PRONOSTIA试验台(图4)进行了3种工况下的轴承退化试验,试验轴承的工况、样本大小和数据量见表1。该试验采集滚动轴承从全新到运行失效全过程的数据。轴承的主要参数见表2,当振动信号的振幅达到20g时试验停止,默认轴承完全失效。PRONOSTIA试验台主要由旋转部分、退化产生部分(在试验轴承上施加径向力)和测量部分组成。旋转部分包括带变速箱的异步电动机及其2个轴,电动机功率为250 W,通过齿轮箱传递旋转运动。载荷部分提供载荷,使轴承快速退化。轴承退化的特征基于传感器的振动和温度确定。加速度传感器的采样频率为25.6 kHz,每隔10 s记录一次测量振动信号,每次采集时长0.1 s,数据点为2 560个。 图4 PRONOSTIA试验台 表1 试验基本条件 表2 轴承的主要参数 选取3种工况下各一组轴承数据分别作为训练集来训练模型,然后使用其他轴承数据作为测试集,分别构建了试验任务A,B,C,具体见表3。 表3 试验任务描述 采用轴承振动数据的最大幅值为健康指标描述轴承的退化状态,轴承1_1和1_2的健康阶段划分和退化点的识别结果如图5所示。由图5a和图5c可知,由于随机波动,原始健康指标不是单调的。使用PAVA去除不同点具有相同权重的随机波动,结果如图5b和图5d所示,经预处理后每套轴承的退化路径都变成一个具有单调趋势的阶跃函数,跳跃可以看作一段时间内对轴承的冲击损坏。2套轴承发生快速退化的时间有较大差别,显然,运行条件对轴承的退化过程有显著的影响。 (a) 轴承1_1的健康阶段划分 (b) 轴承1_1的退化点识别 轴承振动数据的预处理过程使用n=10的滑动窗口识别轴承全生命周期振动数据的退化点。通过线性最小二乘法回归模型对每个滑动窗口进行拟合,获得每个滑动窗口对应的阈值。根据人工经验的多次试验选择,设置最大梯度阈值为0.05,即当出现某个阈值大于0.05时,则对应的滑动窗口的位置为最终退化点位置。 剩余的训练轴承和测试轴承均使用上述方法进行退化点的识别,将轴承全生命周期的振动数据划分为健康阶段和快速退化阶段,选取退化点后的轴承振动数据,即快速退化阶段的振动数据进行后续轴承剩余使用寿命预测试验。 为验证本文方法的有效性和先进性,进行不同特征提取模型和不同领域自适应模型的试验对比,表4模型均使用同一数据集快速退化阶段的振动数据。 共设计了3种类型的对比试验:1)使用全生命周期的振动数据和快速退化阶段的振动数据分别进行剩余使用寿命预测的消融试验; 2)用不同领域自适应模型比较剩余使用寿命预测的效果;3)用不同特征提取模型比较剩余使用寿命预测的效果。 表4 不同对比模型介绍 为量化本文模型的性能,选取均方根误差(Root Mean Squared Error,RMSE)作为评估剩余使用寿命预测模型的指标。均方根误差反映了测试值偏离真实值的程度,均方根误差值越小,表示测试精度越高,说明剩余使用寿命预测模型的效果越好。均方根误差的公式为 (12) 3.3.1 消融试验 为证明本文方法中轴承数据健康阶段划分的必要性,分别使用全生命周期数据和快速退化阶段数据,采用基于对抗域自适应的轴承剩余使用寿命预测模型进行对比试验,结果如图6所示,使用快速退化阶段数据的RMSE值均小于使用全生命周期数据的RMSE值,这可能是由于健康阶段数据和快速退化阶段数据样本量差距过大,而导致模型评价指标难以准确反映预测精度。 图6 使用/不使用轴承退化阶段数据的试验结果 相比于使用全生命周期数据进行预测,进行轴承数据健康阶段的划分,使用快速退化阶段的数据进行剩余使用寿命预测能够取得更好的预测精度。 3.3.2 不同领域自适应模型 不同领域自适应模型在任务A,B,C下所有轴承的试验结果如图7所示,轴承在对抗域自适应模型(图中用OURS表示)中的RMSE值均小于TCA,GAN模型的RMSE值。TCA,GAN算法通常难以找到源域和目标域数据的域不变性特征,从而影响了知识迁移的效果。本文方法与其他领域自适应方法相比,对不同工况下的轴承间的剩余使用寿命预测具有良好的效果。 3.3.3 不同特征提取模型 不同特征提取模型在任务A,B,C下所有测试轴承的试验结果如图8所示, 轴承在特征提取部 图8 不同特征提取模型的试验结果 分为LSTM的对抗域自适应模型中的RMSE值均小于特征提取部分为CNN,AE模型的RMSE值。与时间序列相关的特征往往反映了时间序列前后知识的内在联系,CNN,AE模型通常难以提取到长时间序列数据的内在特征,因此表现较差。 本文提出了一种基于对抗域自适应的轴承剩余使用寿命预测方法。为解决轴承剩余使用寿命评价指标可能因健康阶段数据和快速退化阶段数据样本特征差距过大导致模型评价指标难以准确反映预测精度的问题,采用基于等渗回归算法将轴承全寿命周期数据划分为健康阶段和快速退化阶段,选择轴承快速退化阶段的数据进行剩余使用寿命预测。为解决域差异问题,提出了基于对抗域自适应的方法以最小化源特征与目标特征之间的分布差异。对比有无健康阶段划分的剩余使用寿命预测试验,以及其他领域自适应和特征提取模型与本方法的对比试验,结果验证了本文方法的有效性和先进性。 对抗域自适应方法主要保留2个域间的不变特征,可能会从目标特征中删除特定于任务的信息,以最大程度减少对抗性损失,这可能会影响预测效果;在健康阶段划分中,人工设定的梯度值可能不准确或不具备普适性,如果针对不同的轴承数据能够自适应地选择梯度值,此方法的预测精度和泛化能力将得到很大提升。

2.3 轴承剩余使用寿命预测方法

3 试验与分析
3.1 寿命预测数据集描述




3.2 轴承健康阶段划分与退化点识别


3.3 轴承剩余使用寿命预测试验设置







4 结束语
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
计算机技术与发展(2020年11期)2020-12-04
电子制作(2018年19期)2018-11-14
电子制作(2017年8期)2017-06-05
自动化学报(2017年11期)2017-04-04
中国公路(2017年12期)2017-02-06
电子与信息学报(2015年12期)2015-08-17
噪声与振动控制(2015年4期)2015-01-01
应用化工(2014年4期)2014-08-16
轴承(2010年2期)2010-07-28
