基于卷积神经网络的列车位置指纹定位算法研究
2023-02-13 03:48党建武郝占军张振海
铁道学报 2023年1期
罗 淼,党建武,郝占军,张振海
(1.兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070;2.兰州交通大学 铁道技术学院,甘肃 兰州 730070;3.西北师范大学 计算机科学与工程学院,甘肃 兰州 730070;4.西北师范大学 甘肃省物联网科学研究中心,甘肃 兰州 730070)
列车位置信息的高精度及实时传输是确保铁路安全运输的前提。在平原开阔地带全球卫星导航系统即可满足列车定位要求,但在隧道等卫星定位盲区全球导航系统则无法使用;新一代列控系统提出将去除如应答器、轨道电路等轨旁设备,这些都对列车高精度定位提出了更加严峻的挑战。无线通信技术以其易部署、无需其余辅助设备、不增加建设成本等优势而被广泛应用于定位研究中,新一代铁路列车通信系统LTE-R更是实现了铁路全线无缝覆盖,可以为列控系统提供列车定位服务。位置指纹定位法是无线通信定位技术常用的方法之一,主要包括离线阶段的指纹数据库建立和在线阶段的指纹匹配解算。该方法因其经济效率高、只需单个基站就能完成定位等优势引起了国内外的高度关注。
文献[1]采用位置指纹匹配算法中经典的最邻近算法和K近邻算法完成了待测点的定位。文献[2]针对高速铁路地震预警系统对列车实时定位,以铁路沿线平原地带GSM-R系统的接收电平、定时提前量、公里标等建立离线指纹数据库,采用传统的加权K-近邻算法(K Weighted Nearest Neighborhood,WKNN)实现在线阶段的指纹匹配,实验证明该方法定位平均误差为82 m,能够满足高速铁路地震预警系统的需求,但该定位精度还远远达不到列控系统对中密度线路上列车定位精度小于10 m的要求[3]。文献[4]利用混沌粒子群算法优化权值的优越性,提出CPSO_WKNN位置指纹定位算法对列车位置坐标进行解算,实验证明当指纹间距取25 m时,该算法满足定位误差小于25 m的概率为96%,可以满足低密度线路上列车在隧道环境下的高精度定位,但由于指纹间距过小,指纹采集阶段工作量会较大。文献[5]采用改进的K-means算法,基于最长距离的思想选择最优初始聚类中心,并利用改进后的算法对指纹数据库进行优化,完成指纹位置的粗略定位,再结合K值邻近算法(K-Neareast Neighborhood,KNN)实现精确定位。文献[6]认为离线指纹数据库对指纹定位精度的影响较大,提出采用克里格插值法减小离线阶段采集数据的工作量,同时引入可变参数提高指纹数据库的质量,减小定位误差。文献[7]提出基于最小二乘支持向量机的位置指纹定位法,并将指纹定位转化为一个多类别分类问题,提高了位置指纹的分类精度,减小了指纹匹配的计算时间。综上可以看出,传统的位置指纹定位一般通过优化算法和减小指纹采样间距等提高定位精度,但都不能满足中密度线路中对于列车定位的需求;而且随着算法的增加,必定需要在定位实时性方面做出牺牲;同时指纹间距采样过密,又无形中增大了前期指纹采集的工作量。显然,定位精度、定位实时性、建立指纹数据库的巨大工作量,是目前传统位置指纹定位亟待解决的重点问题。随着深度学习在各领域的成熟应用,一些研究者将深度卷积神经网络和位置指纹定位结合起来,并开展了一系列的研究。
文献[8]利用DCNN和频谱图自动学习无线信道的指纹特征,从图像层次证明频谱图DCNN模型能够用于指纹识别,其准确率可以达到96.46%。文献[9]采用卷积神经网络结合传统位置指纹定位技术,针对室内定位环境进行了研究,首先利用卷积神经网络模型预判出待测点的大致范围,减小匹配阶段的指纹库,再结合传统指纹定位算法快速确定目标最终位置。文献[10]根据信号传播模型获取离线指纹数据,有效降低指纹采集和维护的工作量,然后再将指纹数据变换为灰度图像指纹样本,建立了一种综合信号传播模型和卷积神经网络的指纹匹配定位算法,应用场景为智能终端室内定位,取得了较高的定位精度。文献[11]提出了一种基于CNN的指纹定位算法,采用CNN改进指纹库的构建,然后使用一种概率方法来进行最后的指纹匹配,获得了更好的鲁棒性和定位精度。文献[12]提出了一种基于接收信号强度指标RSSI的CNN指纹定位模型,并与其他CNN模型进行了对比,结果表明该模型可以将室内的定位精度提高到1.44 m。文献[13]在建立离线指纹数据库前,利用叠加去噪自动编码技术提取RSSI特征,构建离线特征加权指纹数据库,然后建立深度神经网络Wi-Fi指纹定位模型,通过实验证明了DNN在室内位置指纹定位中的可行性,通过与其他Wi-Fi指纹定位方式比较,其定位精度更高。
综上可知,深度卷积神经网络算法在位置指纹定位中的效果明显优于传统位置指纹定位。但是大多卷积神经网络位置指纹定位的应用场景为室内Wi-Fi环境,该环境空间区域较小,信号源数量和位置可根据实际需要设置,位置坐标采用三维坐标。而高速铁路隧道环境与室内定位环境不同,信号源位置相对固定且距离较远,列车运行时接收到的信号源不断变化且位置信息为公里标。如何结合高速铁路LTE-R信号强度值特征创建离线灰度图像指纹数据库,搭建适用的卷积神经网络定位模型,目前仍是空白。本文基于现场LTE-R网络实测的参考信号接收功率RSRP数据,采用2σ准则、模糊C均值聚类(Fuzzy C-Means Clustering,FCM)及类数据加权对原始数据进行预处理,提高信号强度值的有效性,同时将移动端的发送定时提前量融入指纹数据中,增强指纹特征;对处理后的数据进行转换生成符合高速铁路隧道环境的灰度图像位置指纹数据库,建立卷积神经网络定位模型FCM-CNN;通过实例验证,证明了本文所建立的FCM-CNN模型相较于采用未经处理的数据作为样本的CNN模型及传统位置指纹定位方式,具有更高的定位精度,能够满足中密度线路上对列车定位精度小于10 m的要求。
1 原始指纹数据处理
1.1 数据获取
为保证本文所采用的方法能更好地解决列车真实运行条件下的定位问题,本文的数据从列车LTE-R无线场强和扫频测试子系统中获取。采用TSWM扫频仪,配备2个高灵敏度的20 MHz前端,支持30 MHz~60 GHz内的连续扫频,获取RSRP信号强度电平值信息,并存入数据库备用。
采集到的RSRP数据信息必须满足时间一致性和空间变异性的要求才能应用于位置指纹定位中,为此分别对不同时间同一位置指纹采样点,以及不同位置指纹采样点同一AP信号源进行测量,RSRP实测结果见图1。由图1(a)可见,某位置指纹采样点所获得的来自不同小区的RSRP值存在一定差异,且同一小区中信号强度保持不变,满足位置指纹定位中对于时间一致性要求;由图1(b)可以看出,在不同地点测得的来自同一信号源的信号强度不同,满足空间变异性,且不同位置指纹采样点的RSRP值符合距离信号源远弱近强的变化趋势,符合列车运行时接收信号强度的实际情况。

图1 RSRP实测结果
1.2 数据预处理
从图1可以看出,虽然采集到的RSRP值满足位置指纹定位的条件,但由于信道传输错误、信号在较短时间及较小空间中出现的动态变化,均会使采集到的RSRP值出现一些偶然异常值,影响位置指纹数据库的准确性,为此采用2σ准则、FCM、类数据加权的方式对原始指纹数据进行预处理,在保留指纹特征的同时最大限度地剔除异常值,提高指纹数据库的准确性,有效减小定位结果的畸变。
Step1采用2σ准则对原始指纹数据库进行限幅处理,去除因偶然因素引起的无效值,计算高斯分布的标准差,筛选出符合2σ准则的集合Qn。
(1)
式中:i为整数,i∈ [1,n];xi为原始数据;n、u0、σ分别为原始数据的总量、平均值、标准差。
Step2采用FCM对数据进行迭代和移动,根据样本与聚类中心的相似度关系,按照隶属度大小给出样本属于该类的程度。指纹数据集划分的目标函数为
(2)
隶属度矩阵元素ui,k为
(3)
若聚类中心矩阵V(t)记为[v1v2…vi…vc],则聚类中心更新为
(4)
式中:Jm为目标函数;N为向量P[x1x2…xN]T中的样本数;α为聚类数,1≤α≤N;ui,k为隶属度元素,由其构成隶属度函数矩阵Uα×N;vi为集群的中心;m为大于1的实数,与隶属度函数的模糊性相关;范数‖xk-vi‖为样本xk和集群中心vi之间的欧氏距离;j∈ [1,c],j∈Z;β为每个训练样本的维度。
Step3如果‖V(t)-V(t-1)‖>ε,ε∈ (0,1),那么迭代次数t=t+1;否则,算法停止。通过FCM对Qn进行聚类后分成了α个小集合{q1,q2,…,qα}、然后对各类数据做加权处理,得到单个位置指纹采样点的最终最具代表性的RSRP值。
(5)
式中:r(l,k)为第l个参考点的第k个AP最终值;wj为第j个数据的权值;H()为概率分布函数,用于计算各类出现的概率。
通过2σ准则可以去除的异常数据占总数据的3%左右,FCM及类加权处理可以最大限度地保留指纹数据自身的特征,找到采样点处最佳的RSRP值。通过以上处理可以提高指纹数据的有效性,避免因指纹数据库的误差导致定位结果失效。
2 基于卷积神经网络的列车位置指纹定位
2.1 离线阶段
(1)生成灰度指纹数据库
高速铁路隧道环境几乎固定不变,这对于建立离线阶段的指纹数据库有利,所采集到的AP信号强度值只需在下一次更换AP点时对离线指纹数据库进行更新。根据高速铁路运行特点,列车始终沿轨道方向运行,在被测区段内按照一定的指纹间距设置采样间隔点,每个采集点主要采集该位置及前后两相邻小区AP点的信号强度值,采用1.2节中的方式对数据进行预处理,得到每个位置指纹处构成的最佳RSRP值向量fj为
fj=[f1f2…fR]j=1,2,…,U
(6)
式中:U为位置指纹采样点的个数,由线路总长和指纹间距确定;R为某参考点接收AP点的个数,本文中取值为3,表示列车运行当前及前后3个小区。
实际定位时,为了补偿传输时延,基站会指示列车以一定时间的提前量发动突发脉冲,这个时间提前量定义为定时提前量,可以根据电磁波在移动终端与基站之间传输的往返时间计算。移动终端与基站之间的距离与定时提前量的关系为
(7)
式中:d为列车与基站之间的距离,km;TA为列车的定时提前量;c为电磁波在介质中的传播速度,km/s;b为LTE-R系统的比特时长,s。
指纹条中所包含的特征值越多,指纹的特征鉴别能力越强[14]。本文将发送端的定时提前量纳入指纹条中以增加其特征鉴别能力,提高定位精度。但从式(7)中可以看出,定时提前量与信号强度量纲不同,为此采用无线传统模型将定时提前量映射为无线电传播损耗。在LTE-R系统中,SPM模型可以更准确地计算出路径损耗L(d)差异,其计算式为
L(d)=λ1+λ2lgd+λ3lghte+λ4Diff+
λ5lgdlghte+λ6hre
(8)
式中:λ1为偏移常量,经最小二乘参数拟合后本文取值为69.55;λ2为与距离d相关的修正因子,一般为默认值26.1;λ3为基站有效高度的相关因子,在基站建设完成后就保持不变,一般取默认值为5.83;λ4为隧道环境中对信号传输过程中衍射的修正因子,取默认值0.2,;λ5为等式右边lgdlghte的修正因子,表示基站高度与距离修正的有效因子,一般取默认值6.55;λ6为列车有效高的修正因子,取值为0;hte为基站发射天线有效长度,m;hre为列车的有效高度,m;Diff为信号传输过程中的衍射损耗。
将式( 7 )代入到式( 8 ),得到定时提前量与无线电传播损耗之间的映射关系f(TA)为
(9)
在位置指纹中引入定时提前量有利于提高定位精度,可得
(10)
采用限幅滤波的方法对采集到的样本数据进行预处理,在每个指纹点采集N个RSRP值,此时指纹向量Fj可整理为
j=1,2,…,U
(11)
式中:f(N,R)为第j个参考点采集到的来自第R个AP点的第N个RSRP值,N由指纹采集量决定且为正整数的平方。

(12)
其中,
经以上变换可将某位置指纹采集点来自当前小区和前后小区3个AP的不同RSRP值,以及相应的定时提前量,通过Fj矩阵表示在一张灰度图片上。K210处采样点获取的灰度图像指纹条见图2,分别为以图片像素大小16×16、20×20为例获得的灰度图片。由图2可以看出,右上部分为采样点所在的当前小区的情况,该部分所接收到的信号强度对应的灰度值最大;左上和左下对应的分别为采样点前一小区和后一小区接收到的信号强度,相对当前小区来说灰度更小一些;右下部分为该采样点的定时提前量,在同一点处定时提前量不发生变化,因此图片中为统一灰度值。

图2 K210处采样点获取的灰度图像指纹条
(2)构建卷积神经网络分类定位模型
卷积神经网络主要由输入层、卷积层、激活函数、池化层、全连接层、损失函数组成,其实质是特征提取和决策推断,将以上这些网络结构进行组合,针对不同问题修改其参数,以提高特征提取和决策推断的正确性。
在卷积神经网络定位模型中通过多个卷积层和池化层对输入的灰度图像的灰度值矩阵T进行处理,达到降维、升维或者特征值提取的目的。卷积神经网络模型中第i层的输出可以用Hti表示,这里Ht0=T,如果第i层是卷积层,那么Hti可以描述为
Hti=f(Wi*Hti+bi)
(13)
式中:Wi为第i层卷积核的权重;*为卷积运算;bi为当前的偏移量;f()为线性函数的激励。
池化的功能是放大重要信息,淡化不重要信息,在保证特征尺度不变的前提下减少矩阵的维数。对卷积后的特征矩阵进行池化,可以得到池化后的特征矩阵Hti为
Hti=pooling(Hti-1)
(14)
灰度指纹图片经卷积层、池化层后在全连接层进行分类,完成输入到输出的映射得到定位结果。
经过数据预处理后的位置指纹数据库,采用上述方法变换成灰度指纹图像数据库,并将其分为训练样本集(包含验证样本集)和测试样本集。数据样本集中均为代表位置指纹采样点的二维灰度图片,其与手写体数据集具有较高的相似性。以手写体数据集分类中具有极高准确率的LetNet-5为基础,结合本文所建立的灰度图片指纹条特征,建立适用于高速铁路列车定位的卷积神经网络位置指纹定位模型FCM_CNN,见图3。图3中,输入为20×20×1规格的灰度指纹图片;卷积层C1步长为1,使用全零填充,卷积核大小及深度为5×5×6,选用ReLU作为激活函数,输出为20×20×6的节点矩阵;池化层S2中过滤器大小为2×2,步长为1,激活函数为ReLU;卷积层C3的步长、填充方式、激活函数的选用与C1类似,卷积核大小及深度为5×5×16,输出为10×10×16的节点矩阵;池化层S4的过滤器、步长、激活函数与S2一致,输出为5×5×16的矩阵;F5、F6为全连接层,分别包含425个、55个神经元;F6输出后再通过softmax输出最终的定位结果。

图3 卷积神经网络位置指纹定位模型
下面以20×20的图像为例分析该模型的计算过程:输入灰度指纹图片在C1卷积层中,首先使用6个5×5的卷积核,2×2的最大池化,步长为1对图像操作,形成6个10×10的特征图;然后再使用16个5×5的卷积核,2×2的最大池化,步长为1对图像操作,形成16个5×5的特征图;最后变换数据格式,生成1×5×5×16的数据用于分类。使用ReLU作为激活函数[15]y,得出

(15)
因本文的灰度指纹图像较小,因此设计时减小了网络结构卷积核、池化的尺寸以提高特征提取能力;采用ReLU函数作为激活函数,可以利用ReLU函数导数计算简单的优点提高模型收敛速度;相比于LeNet-5,本文减少了一个全连接层,使网络复杂程度得以降低,同时为了防止过拟合和训练模型相对简洁,在全连接层后还添加Dropout层,取值为0.5。
2.2 在线阶段
在线定位阶段分为如下3个步骤:
Step1采集RSRP场强信息。当需要对列车进行定位时,按100 ms的周期采集列车在相应指纹采样点的信号强度,采集的信号强度值为隧道环境中列车运行时前后小区及当前小区部署的AP场强,采集完毕后完成在线存储。。
Step2场强数据RSRP预处理。在定位请求结束后,对得到的信号强度矩阵进行形式变化,一般采用插值法使矩阵的大小满足模型输入层灰度图像指纹条的要求,完成在线灰度图片指纹条的构建。
Step3定位。将图像数据输入定位分类模型,返回定位结果到终端,完成定位。
3 实验验证及结果分析
3.1 实验参数设置
(1)基于某高速铁路隧道环境的实测数据验证本文方法的有效性。线路里程为K208—K226,共设 14 个 LTE-R 基站,平均间距为 1.3 km;指纹参考点180个,指纹间距100 m;训练集灰度指纹图片共12 600张,包含验证集灰度指纹图片900张;测试集灰度指纹灰度图片共1 350张。
(2)根据以往的实验设定模型参数,并在实验中不断调整至最优值,构建定位参考模型相关参数,见表1。其中,每个参考点的样本训练集采集量为7 000个,训练模型的初始学习率为0.05,使用指数衰减法;为了用较大的学习率获得较优的解,设置学习率衰减系数为0.96,学习率随迭代次数不断减小,可以保证后期模型训练的稳定性;滑动平均模型衰减率为0.9999,该值越大模型越趋于稳定,为了使模型在训练前期可以更新更快,使用num_updates参数动态设置滑动平均衰减率的大小,即
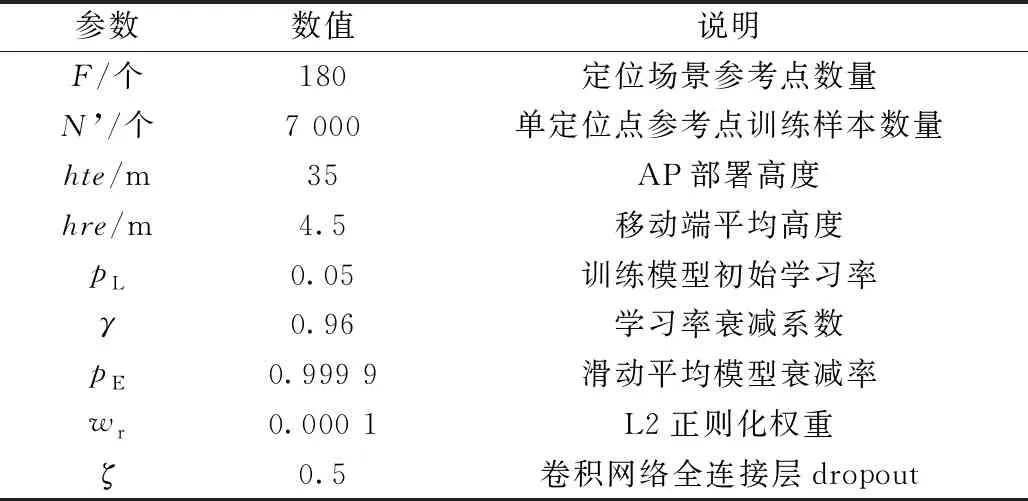
表1 实验参数
(16)
式中:decay为衰减因子。
(3)使用交叉熵函数作为模型训练的损失函数H(p,q)[16-18],即

(17)
式中:p为给定的正确值的概率分布;q为给定的预测值的概率分布。
(4)使用L2正则化和dropout处理过拟合。L2正则化函数R(w)计算式[19]为
(18)
式中:w为确定模型复杂度的权重值。
3.2 影响定位精度的因素
(1)样本大小及指纹间距对定位精度的影响
从既往研究中可知,指纹间距的选取是影响定位结果的关键因素[18],训练样本集的大小会直接影响卷积神经网络位置指纹定位模型的精度和速度,因此本文着重讨论指纹间距的选取和单定位点参考训练样本数量对定位模型精度、训练时间的影响,见图4。从图4(a)可以看出,位置指纹间距越大定位精度越低,同时考虑指纹采集工作量及中密度线路中定位精度小于10 m两个因素,本文选择100 m作为指纹采样间距,该间距大于传统位置指纹定位方式中常取值(10、20、50 m),大大降低了指纹采集工作量。从图4(b)可以看出,卷积神经网络模型的定位精度随着样本数量的增加迅速提高,在训练样本达到9 000以上时,定位精度最高。

图4 指纹间距及训练样本大小对定位精度的影响
除了考虑模型的定位精度外,还需要考虑模型的训练时间以满足列车定位实时性的要求。样本数量与模型训练时间、定位精度的关系见表2。从表2可以得出,当单定位点参考训练样本取7 000时,定位精度可以达到9.87 m,模型训练时间为252 s;训练样本超过7 000后,定位精度虽有提升但变化不明显,模型训练时间却增加较多。

表2 样本数量与模型训练时间、定位精度的关系
(2)图片大小对定位精度的影响
按2.1节的灰度图像指纹生成过程,以单定位点训练样本数7 000为基础,在图片实验环节分别生成16×16、20×20、28×28三种格式的图片,图片大小不同所包含的RSRP值不同,图片越小训练的时间越短。不同规格图片对定位结果的影响见表3。从表3可以看出,当图片大小选取为20×20时,定位精度和模型训练时间均可以达到较好的水平,能够满足列车定位的高精度、实时性要求。

表3 不同规格图片对定位结果的影响
经过实验验证后本文选择单定位参考点的训练样本为7 000,输入灰度图片大小为20×20。
3.3 与其他定位方法的比较
为了验证本文所建立的基于FCM_CNN的位置指纹定位模型的可用性、有效性及定位精确性,分别与采用未经处理的数据作为样本的CNN模型及传统算法进行比较。由于在前期的研究工作中已分别对WKNN算法和最小二乘支持向量机(Least Squares Support Vetor Machine,LS_SVM)算法进行了优化改进并取得了较好的结果,因此本文主要与混沌免疫粒子群优化WKNN算法、混沌免疫粒子群优化WKNN(Chaos Immune Particle Swarm Optimization_K Weighted Nearest Neighborhood,CIPSO_WKNN)算法、模糊最小二乘支持向量机(Fuzzy Least Squares Support Vetor Machine,FLS_SVM)算法的定位结果进行对比。采用卷积神经网络定位模型进行定位时,指纹间距取值为100 m;文献[20]已验证传统定位方式下指纹间距越小定位精度越高,因此实验中FLS_SVM位置指纹算法及CIPSO_WKNN位置指纹算法中取指纹间距为20 m,以获取最高的定位精度。隧道环境中指纹采样点布置示意见图5。

图5 隧道环境中指纹采样点分布示意
4种位置指纹定位方式下的定位精度比较见图6。从图6中可以看出,采用卷积神经网络的列车位置指纹定位结果均优于传统的解算方法;采用未经处理的数据作为样本的CNN模型的定位精度可以提升到12.7 m左右,而本文所采用的FCM-CNN位置指纹列车定位方式在指纹间距取100 m时,有100%的概率下定位误差小于10 m;采用FLS_SVM位置指纹定位解算时,定位误差小于10 m的概率为40%,定位误差小于20 m的概率为89%,而采用CIPSO_WKNN位置指纹定位时,定位误差小于10 m的概率仅有22%,定位误差小于20 m的概率只有43%。从以上结果可以看出,仅本文采用的FCM-CNN算法可满足列控系统对中密度线路下列车定位精度的要求。

图6 不同定位方式精度比较
将测试集数据输入到本文所建立的卷积神经网络位置指纹定位模型中进行定位测试,得出定位结果的时间最长不超过10 s。传统定位方式下,进行定位请求后解算定位结果的时间均较长。不同定位方式下定位实时性比较见表4。由表4可知,本文所采用的方法大大缩短了传统定位方式下位置指纹定位解算时间,解决了传统指纹定位方式下定位实时性不高的问题。
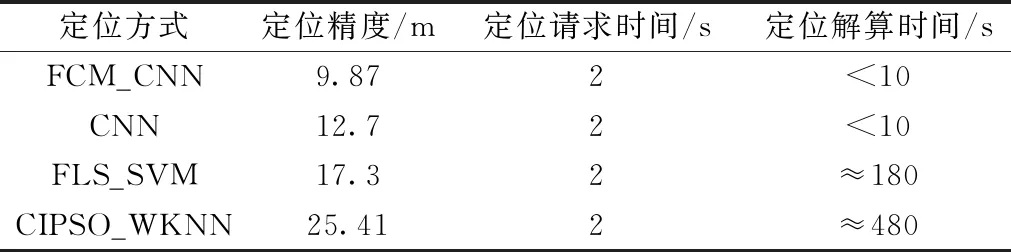
表4 不同定位方式下定位实时性比较
4 结论
本文针对高速铁路隧道环境中采用位置指纹定位时定位精度及实时性较低的问题,创新性地将深度卷积神经网络应用于位置指纹定位中,创建了将场强指纹数据转化为符合高速列车运行特征的灰度图片指纹条的规则,建立了FCM-CNN模型对列车位置进行解算;重点讨论了指纹间距、单定位参考点训练样本大小、灰度图片规格对于定位精度的影响,同时与采用未经处理的数据作为样本的CNN模型及传统的WKNN算法、LS_SVM算法进行比较。结果表明:
(1)本文所采用的方法采样指纹间距可以达到100 m,相比传统位置指纹定位的指纹采集间距来说极大地降低了离线阶段指纹采集的工作量。
(2)卷积神经网络运用于列车位置指纹定位具有可用性和有效性。本文采用的FCM-CNN位置指纹定位模型,其定位精度最高,定位误差可以减小到10 m以内,且得出定位结果时间最短,满足列车运行控制系统在中密度线路上对列车实时性及高精度的要求,具有一定的应用价值。
猜你喜欢
军事文摘(2023年4期)2023-04-05
北京航空航天大学学报(2022年6期)2022-07-02
小哥白尼(趣味科学)(2021年11期)2021-02-28
小天使·一年级语数英综合(2020年10期)2020-12-16
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
自动化学报(2016年8期)2016-04-16