
支线客机关键技术与发展方向
2023-02-07 02:17:02陈勇钟科林罗悦王淼
航空学报 2023年2期
陈勇,钟科林,罗悦,王淼
1.中国商用飞机有限责任公司,上海 200436
2.上海交通大学 航空航天学院,上海 200240
3.中国商用飞机有限责任公司 上海飞机设计研究院,上海 200135
对于民用运输类客机来说,飞机的最终目标是面向飞行的运输需求,由飞机运行的能力、性能和有效性构成。其中,飞机运行能力描述了飞行运输能力,主要由客载、商载和航程等重要特征能力构成;飞机运行性能描述了飞行品质,主要由飞机环境、飞机轨迹和飞行效率构成;飞机运行有效性描述了飞行可用性,主要由飞行安全性、派遣率和适用性构成。因此,不同的飞机具有不同使命、不同应用期望和不同的飞行需求,从而形成不同的使命目标,明确使命的过程组织,形成使命的能力需求。例如对于宽体远程运输机、窄体支线运输机、通用飞机、全天候运输直升机以及特种飞机等,由于不同种类的飞机具有不同的飞行使命和背景,最终形成了各自独立的运行模式和能力。
中国民航总局将使用70 座以下涡桨飞机和50 座以下各类飞机的航班运输定义为支线运输,航线距离<800 km、年旅客运输量<20 万人次的航线市场定义为支线市场。国际上主要依据航线采用的飞机大小以及航线长度来区分干线和支线,目前国内外大部分数据统计和分析也基本按照这一原则进行。通常认为,连接不同枢纽机场的航线,一般航距远、客流量大,被称为“干线”;而由枢纽机场向周围中小城市辐射的航线,航距短、客流量小,座级在30~90 座之间,被称为“支线”。90~120 座的大型支线飞机也经常用于“点对点”航线(网状航线)。
在市场需求牵引和国家政策大力扶持的背景下,支线航空发展迫在眉睫[1],老牌支线飞机制造商逐渐谢幕,全球支线飞机竞争格局正在重塑[2],国际支线民机产业格局和产品的变革发展带来了机遇,也提出了挑战。针对支线客机行业技术门槛高,核心技术封锁严重的问题,需要对支线客机关键技术进行重点攻关并高度关注未来技术发展方向。因此,本文在分析支线客机任务使命要求基础上,对支线客机总体气动、动力、机载系统这3 方面的关键技术进行了详细阐述;并结合民机发展方向,提出了支线客机技术发展方向,基于未来发展,提出了基于自动、自主和智能化的支线客机任务系统概念。
1 支线客机发展历程
1.1 支线客机发展需求
随着旅游和短途公务旅行需求激增,发展支线航空运输成为推动航空运输发展的新战略[3]。以支线飞机进行高密度航班直达飞行,开通新城市对之间不经停支线航线,在非高峰期时段和客流量少的航线以支线飞机替代干线飞机将会是航空公司更经济的战略性选择[4-5]。此外,限制支线航空运输市场发展的壁垒正在逐步清除,21 世纪以来,欧美放宽了空中交通管制,以利于支线航空运输市场发展[6-7]。美国限制干线飞机飞行员驾驶支线飞机的条款已经开始松动[8],欧洲放开了边境政策以允许支线飞机飞短途国际航线,降低起降费和导航费以鼓励开发新支线航线[9]。虽然中国的支线航空运输市场还处于初级阶段,并未形成规模,目前大多支线航线是以窄体干线飞机采用“甩辫子”的方式来运输,航班频度低,经济效益差,制约了支线运输航线的发展,但是随着近年来支线机场的快速发展和西部大开发战略的推进[10]以及民航关于组建新航空公司的政策要求,支线航空运输市场即将进入高速发展期[11-12]。
1.2 支线客机研究现状
新中国成立后,中国民用客机的发展历程曲折又复杂,先后经历了模仿研制、自行研制、联合研制、合作生产和转包生产多种探索道路。ARJ21 是民机历史上第一款从一开始就按照国际适航条例和中国适航条例全新研制的支线客机。通过ARJ21-700 项目,中国民机产业走完了从研发、取证、批产、交付、运营到客户服务的全过程,建立了主制造商和供应商集成创新体系,包括设计研发、适航取证、批生产、航线运营、客户服务、项目管理等体系,为C919 大型客机项目顺利推进开辟了道路。目前,C919 正处在试飞取证的阶段。
为了避开波音和空客双寡头垄断的干线市场,很多航空制造商都是先从支线市场进入,例如庞巴迪从支线的CRJ 系列开始,逐渐打开了支线客机市场,并走向准干线的C 系列飞机;巴航工业从支线的ERJ 系列开始,走向准干线的E2系列飞机;UAC 公司从支线的SSJ100-95 飞机开始,走向干线的MC21-300 飞机;中国商飞从支线的ARJ21-700 飞机开始,走向干线的C919 飞机,并且中俄还将联手研制280 座的双通道飞机;三菱也从支线的MRJ9 飞机开始[13]。虽然支线飞机与干线飞机有很多共用的技术,但是由于他们的航程不同,飞机规模不同,面向的市场不同,衍生出不尽相同的任务使命和关键技术。
1.3 支线客机的任务使命
支线客机应用任务是指基于支线客机使命、面向飞行需求、依据环境条件,有目标、有计划地完成飞行过程和活动的组织。支线客机任务系统针对应用任务需求、环境和范围,依据应用任务能力的组织、管理和控制,实现应用任务系统目标、能力、过程和状态的一体化组织与管理。
1.3.1 支线客机应用使命与背景
应用使命与背景是支线客机飞行应用任务组织的基础。不同的飞机具有不同使命、不同应用期望和不同的飞行需求,从而形成不同的使命目标,只有明确使命的过程组织,才能形成使命的能力需求[14]。
例如支线客机是短航程小型旅客运输机,其主要运行模式和目标是:小体型,一般设计座位为35~100 座,主要承担局部地区短距离、小城市之间、大城市与小城市之间的旅客运输;短航程,飞行距离在600~1 200 km 之间,与主干线航班相对而言,支线航班单程航行距离较短;高收益,对于中低客流航线,选取支线客机可以降低成本,提高航线密度;高安全,包括空域交通态势感知,飞行航路冲突管理,飞行间隔管理等;高舒适,提供机上办公,宽带通信,旅客自适应娱乐等。
支线客机基于其使命和背景,在整个飞行过程,针对飞机不同飞行阶段分类(如滑行、起飞、爬升等),根据各个阶段环境需求(如空中交通管理、机场离港和进港管理),确定不同飞行任务,支持国际民航组织(ICAO)规定的规则和要求,优化飞行过程,满足飞机更加安全、更少延误、更加节省燃油、更加省时、更加准时、更加环保、更加减少排放的使命要求。通过飞机使命的定义,确定飞机各个阶段的应用组织,明确各个阶段的应用任务,形成应用任务的需求,并通过各个阶段所有应用任务集成形成飞机的使命目标。当飞机使命目标确定后,依据飞机整个飞行阶段的划分,将飞机的使命目标分解到各个阶段的目标。飞机在各个阶段内飞行模式可根据与空管或机场交互模式,依据飞机自身具有的能力,构建本阶段内的目标组织,以及构建各阶段任务组织。
1.3.2 支线客机应用环境与情景
应用环境与情景是支线客机飞行任务的需求与组织。针对支线客机的使命需求,根据支线客机整个飞行过程的组成,依据不同飞行阶段特征和要求,能够确定支线客机飞行过程的任务组织需求。
飞机所有任务都可以通过面向飞行应用环境与情景设计来实现,即根据飞机不同的飞行阶段的划分,依据飞机各个阶段分解的目标来确定飞机飞行的环境。支线客机飞行阶段环境主要包括从准备、加油、上客、装货、启动、滑行、滑跑、起飞、爬升、巡航、进场、着陆、下客、卸货的整个过程中的工作环境,包括自然环境、机场地面支援环境、机场空管和航路空管要求、通信和导航要求等。例如,在自然环境方面,支线客机要适应拟运营航线的地面和空中飞行环境要求,包括温度、湿度、高度、沙尘、腐蚀、季候风、气流扰动、雷暴天气、结冰气象、火山灰、越海飞行等;在机场地面支援环境方面,支线客机要适应各类机场的地面支援条件要求,运行要求和支援设备接口要求。
飞机应用情景定义了飞机在飞行过程基于当前环境,根据阶段目标,形成整个任务活动的场景组织。飞机应用情景系统地描述了飞行当前任务组织,确定了任务背景环境,明确了任务活动模式,保障了任务活动组织的结果与飞机阶段结果的统一,为飞行任务系统奠定了基础。
1.3.3 支线客机应用目标与能力
应用目标与能力是支线客机飞行任务系统的能力与保障。针对支线客机阶段飞行过程的情景需求,支线客机任务系统根据当前飞行环境,建立相应的飞行任务,形成各个场景任务的目标;根据支线客机使命和飞行阶段,通过各个阶段场景任务综合,形成阶段任务目标;最终根据飞行任务运行模式,明确相关任务能力,确定飞行任务过程组织。
支线客机应用目标与能力是面向飞行任务需求与系统功能支撑的组织。飞机应用目标与能力根据飞机的不同任务阶段构成各种任务情景,形成任务情景过程组织,构建基于任务情景活动,通过各个任务情景活动的运行,评估和分析其结果与飞行阶段目标结果的符合性,包括任务组织目标结果符合性、任务处理过程逻辑符合性、任务性能组织符合性和任务能力模式符合性。例如,有些偏远机场地形复杂,需要支线客机对航电RNP AR 进行优化来支持进近过程,进而影响飞机的能力配置。因此,支线客机应用目标与能力一方面与飞机飞行阶段任务情景匹配,另一方面与飞机功能组织衔接,为系统功能设计奠定基础。
1.3.4 支线客机应用组织与结果
应用组织与结果是支线客机飞行任务系统的组织模式与结果。针对支线客机的使命需求,根据支线客机阶段任务的情景设计,依据支线客机形成的任务结果和能力需求,支线客机任务系统必须根据整个基于使命的任务组织,依据应用环境和变化,根据飞机各个阶段任务情景,实现所有任务过程组织,并监控任务结果和效能。由于飞机飞行阶段是相对独立的,对应的环境感知能力是局部的,阶段任务情景是抽象的,飞行任务能力组织是有限的,必然对飞机应用任务的结果与预期产生偏离。因此,应用组织与结果首先完成飞机整个使命的任务组织与集成,实施任务状态的监控与组织管理,控制与监控各个阶段结果过渡与衔接;同时实施监控飞行任务环境的变化,激励相关的任务模型,修改系统的组织与管理状态,支持系统动态组织和管理;最后实时监视任务系统的结果,监视系统威胁和告警,报告任务执行结果和状态,支持结果有效性评估。
根据飞行应用组织和运行过程需求,飞机应用任务组织与结果构建了飞行过程目标,明确了飞行环境情景,定义了飞行任务能力,确定了飞行过程结果。支线飞机应用组织与结果主要由飞行计划组织、飞行环境感知、飞行任务决策和飞行过程组织构成,即根据飞行航路计划组织(初始计划、飞行动态计划),确定飞行航路和空域交通情景,构建飞行应用任务规划和能力组织;根据飞行空域环境(空域交通管理、机载交通态势显示),确定空域交通飞行条件,构建飞行任务目标和条件组织;根据飞行航路导引需求,确定区域导航(Area Navigation,RNAV)和所需导航性能(Required Navigation Performance,RNP)模式,构建飞行任务导航与导引性能组织;根据航迹管理组织,确定飞行航迹和飞行模式(所需到达时间、控制到达时间),构建飞行任务协同决策和运行管理要求;最后,根据飞行环境和任务运行过程,确定飞机过程安全性监视(气象、飞行最小间隔、飞机系统故障),构建飞行任务偏离和危害告警。
2 支线客机关键技术
2.1 支线客机总体气动技术
2.1.1 超临界机翼和机体一体化设计技术
超临界机翼能够在不增加机翼重量的条件下有效提高临界马赫数,这是由于超临界翼型的前缘钝圆,气流绕流时速度增加较少,平坦的上表面又使局部流速变化不大。进而,只有在飞行马赫数较高时,上表面局部气流才会达到声速,即其临界马赫数较高。在达到声速后,局部气流速度的增长较慢,形成的激波较弱,阻力增加也较缓慢。超临界机翼还可用于减轻飞机结构重量,如果维持后掠角不变而采用厚机翼,可降低机翼重量,增加机翼容积,用以放置燃油或其他设备。
对于超临界机翼的设计,首先通过调整翼型上下表面的形状,以匹配目标压力分布,从而获得典型翼型;在此基础上,通过三维剖面的配置,实现机翼展向环量分布,从而提高机翼巡航效率。同时,在机翼设计时,需要考虑相应的低速构型设计。
对于机翼/机身一体化优化设计,首先以“机翼+机身”组合设计机翼布局;再按照“机翼+机身+发房”组合修改布局,充分考虑机翼与发房的有利干扰;最后在装有翼梢小翼的状态下做最终优化。
2.1.2 防结冰设计与验证技术
飞机结冰严重威胁着飞行安全,当飞机经过含有过冷水滴的云层时,在其不同部位上(如机翼、尾翼、发动机进气口、空速管等)将会发生结冰现象。结冰将会导致升力下降、阻力上升,并且容易导致飞机过早失速,对飞机的操纵性和稳定性有很大的影响,严重时将会导致无法挽回的飞行事故。为了提高安全性,飞机采用机械、气热和电热等多种形式的除冰方法来降低结冰危害,这些措施大大提升了飞机对结冰气象条件的适应能力。
支线客机防结冰设计及验证主要包括2 个方面,一方面是结冰条件下的临界冰形确定及性能操稳验证;另一方面是防冰系统设计与验证,包括机翼防冰系统、短舱防冰系统、风挡加温系统、风挡除雨系统和结冰探测系统的设计与验证,如图1 所示。
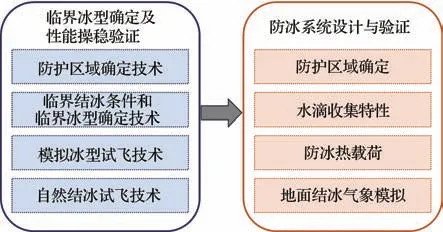
图1 防结冰设计与验证技术Fig.1 Anti-icing design and verification technology
结冰条件下的临界冰形确定以及性能操稳验证技术要点包括以下几个部分:
1)防冰系统防护区域确定技术
防冰系统防护区域确定通过数值模拟方法,对全飞行包线范围内、适航条款所定义的结冰条件范围内,结冰防护部件迎风面的水滴撞击特性进行分析,确定防护部件所需的结冰防护区域。
2)临界结冰条件和临界冰型确定技术
临界冰型确定需要综合考虑适航条款所定义的结冰条件、飞机飞行条件,通过数值模拟方法开展临界结冰状态的筛选,然后通过冰风洞试验对临界结冰状态进行验证及确认,最终得到用于适航取证的临界冰形。
3)模拟冰型试飞技术
在临界冰型确定的基础上,根据适航条款要求,开展干空气模拟冰试飞,确定带冰后飞机性能操稳特性,并开展带冰情况下失速保护系统的设计及验证。
4)自然结冰试飞技术
在模拟冰试飞的基础上,开展自然结冰试飞演示验证,证明飞机满足结冰适航条款要求,在结冰条件下能够安全运营。
对于防冰系统设计与验证,针对机翼防冰系统和短舱防冰系统,通过系统设计状态点(结冰气象条件及飞行条件)、对应状态点下选取翼型表面的局部水收集系数、对流换热系数等关键参数,确定需求热载荷,并在考虑一定余量情况下确定系统的供气参数(即供气流量、温度等),并根据缝翼前缘外形等设计笛形管,同时考虑结构强度等因素然后确定防冰腔结构形式;风挡加温系统的主风挡具有防冰及防雾功能,侧风挡具有防雾功能,根据系统设计状态点(结冰气象条件及飞行条件),确定需求热载荷,并在考虑一定余量的情况下确定玻璃内部的加热功率;结冰探测器需要和空速管、风标以及总温探头进行一体化安装设计,以保证结冰探测器、空速管、风标和总温探头既能正常工作,又互不干扰;地面结冰气象模拟试验设备水雾环境中液态水含量(LWC)与水滴直径(MVD)参数精确控制是一个极其复杂的过程,可以采用气液两相喷嘴产生水雾,通过调节两相喷嘴的供水和供气压力实现LWC 和MVD 的精确控制。
2.1.3 气动弹性设计与验证技术
气动弹性设计与验证技术主要分为气动弹性理论分析技术、气动弹性风洞试验及机上地面试验技术和气动弹性飞行试验技术,如图2所示。
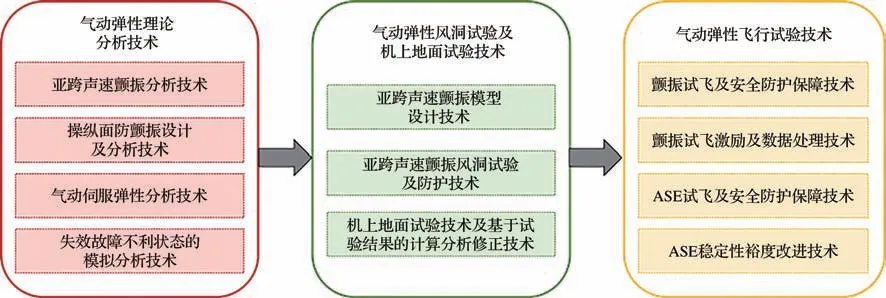
图2 气动弹性设计与验证技术Fig.2 Aeroelastic design and verification technology
1)气动弹性理论分析
在颤振分析方面,可以采用基于N-S 方程、能计及飞机机翼翼型形状、跨声速激波、飞行迎角、静变形的先进气动弹性数值模拟方法计算超临界机翼的非定常气动特性以及颤振特性。采用附加非定常气动力方法计及T 型尾翼牵连运动和静气动力对颤振特性的影响。理论分析需对适航条款所要求的各种正常状态,以及结构损伤、系统失效、结冰、鸟撞等故障失效不利状态进行模拟和分析。
2)颤振风洞试验
根据动力学相似理论设计颤振风洞试验模型,保证试验模型与飞机的动力学相似,保证风洞试验可用以验证表明飞机的气动弹性特性。具体技术措施包括:根据适航条款要求,通过机翼前缘加配重、大梁刚度变参设计、结构刚度折减等工程方法,实现对故障状态参数的设计和模拟;在强度分析计算的基础上,完成高速颤振模型大梁的静强度试验,保证模型强度满足试验要求;通过设计复式悬挂支持系统,以及基于振动过载门槛值的程序自动防护,保证低、高速颤振风洞试验安全。
3)颤振机上地面试验
基于颤振机上地面试验结果对数学模型进行修正,以提高分析的精确性和可靠性。通过对起落架缓冲支柱油腔注油至溢出的方法,消除起落架支持时非线性的影响,综合采用加力、仿真分析和附加质量的方法,消除飞机结构非线性的影响,并实现了对高度密集耦合弹性模态的有效分离和识别。
4)颤振飞行试验
基于理论分析和风洞试验结果,确定气动弹性飞行试验状态点(高度和速度)、传感器布置方案、试飞和激励方法;采用基于小波理论的试飞数据处理方法;采用振动过载的安全门限和紧急情况应急预案,保证飞行试验安全;基于ASE 试飞结果修正ASE 计算模型,通过加装结构陷幅滤波器改善飞机俯仰回路幅值裕度。
2.2 支线客机动力技术
2.2.1 全权限数字电子控制技术
在航空发动机起步阶段,工程师们通过液压机械装置组成的控制器对发动机进行控制。随着航空动力需求的增长,航空发动机对其控制器的要求也越来越高,单变量控制模式难以满足需求,出现了液压机械式控制器与电子控制的最初结合,从而迎来了监控型电子控制器的时代。此时,监控式控制器只是作为液压机械式控制器的辅助,仅用于高层监视功能和非关键控制功能,而发动机关键控制功能仍由液压机械式控制器完成。随着发动机控制需求日益复杂化,如控制参数增加、控制精度要求提高等,拥有多输入多输出处理能力、更高软硬件冗余度的全权限数字电子控制器(FADEC)应运而生[15],如图3 所示。FADEC 在动力控制系统架构中占据了核心地位,是信息处理、逻辑运算、发布指令的中枢,多输入多输出处理的能力也使得FADEC 可以同时实现更多闭环回路的精确控制。此外,在发动机故障检测与隔离以及发动机健康管理与维护中,FADEC 扮演着愈来愈重要的角色,持续为当代民用航空动力保驾护航。
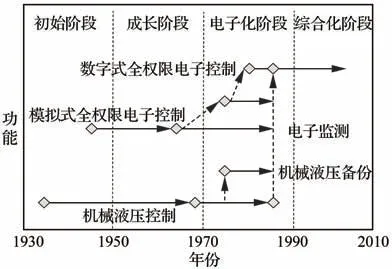
图3 航空发动机控制方式发展历程[15]Fig.3 Development history of aero engine control methods[15]
2.2.2 分布式控制技术
目前的发动机控制系统是集中式余度FADEC,所有的控制规律处理和计算、余度管理以及输入/输出信号的滤波和处理都经由FADEC 进行,控制系统中最重的是引线和接头。未来的FADEC 将采用分布式控制系统,与集中式FADEC 相比,引线数、接头数和重量将大大减轻。在分布式控制系统中,灵巧装置通过一条余度的高速数字数据总线和FADEC 通信。灵巧装置可以是一个传感器,或一个作动器,或是兼有传感和作动功能的装置。每个灵巧装置有自己的处理元件,可以执行所要求的当地功能。为使温升和功耗最小,还将采用变速和变流量泵[16]。
除了降低发动机控制系统的复杂性和重量之外,分布式控制系统的优点还有:由于采用通用模块和标准接口,缩短了研制周期和降低了成本;通过对每个灵巧装置进行自检和诊断,降低了维修成本;采用新的元件级技术,对中央处理计算机的改动最小甚至无需改动,设计和升级的灵活性大;FADEC 可以远离发动机安装,进一步降低重量,改善可靠性和控制系统的总和。
2.3 支线客机机载系统技术
2.3.1 面向飞行场景开发的正向设计技术
新一代支线客机的开发模式如图4 所示。首先,基于新一代民机的需求与目标,提出飞行使命与目标。其次,基于新一代民用飞行应用与飞行过程,提出飞行应用目标、飞行应用环境,飞行过程构成和飞行过程改进。接着,面向飞行效率、飞行效能和飞行安全需求,提出新一代民机能力与需求。最终,实现新一代支线客机的性能与保障,包括安全性、经济性、环保性、舒适性。
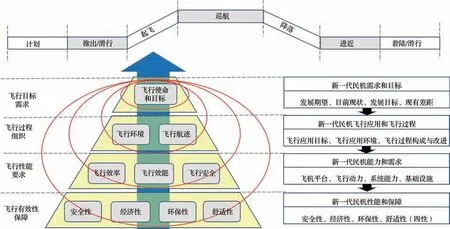
图4 新一代支线客机的开发模式Fig.4 Development mode of the new generation of regional airliner
新一代支线客机将采用基于飞行场景开发的正向设计技术,正向设计是指功能及需求自顶向下逐渐进行分解分配和定义,再自底向上逐级进行验证,最终形成V 型开发体系[17]。飞机自顶向下的正向设计过程中的需求来源于具体应用的飞行场景,飞行场景描述了机组-飞机-环境的动态关系,将飞行场景视为一个多维空间,主要包括3 个维度,即天气条件、飞机因素和飞行环境。飞行场景的开发可总结为:分阶段、分方面、选项组合,同时结合考察目标、评估要求及准则。主要分为以下步骤:①分阶段,将飞行场景根据飞行航段分成多个阶段,包括起飞场面、起飞、爬升、巡航、下降、进近、着陆、着陆场面等;②分方面,将飞行场景根据核心内容及工作负荷测量要求分为天气情况、飞机因素、飞行环境、功能因素、数据窗口等几个方面;③选项组合,选取、配置并组合飞行场景各个方面的内容,先将飞行场景的各个方面分成若干主题专项,每一主题专项包含若干选项,再可根据需要选取主题专项并配置其选项;④结合考察目标、评估要求及最小飞行机组准则。
以波音787 和F-35 为例,传统的大型飞机项目虽然严格按照系统工程进行管理,但是其研制过程是基于文档的,这可能导致信息孤岛、开发效率低等问题。此外,在复杂产品研发过程中,需求是不断变化的,这要求系统的功能、逻辑架构和接口能够快速响应变化。因此,现代系统工程正在由基于文件的管理逐渐转变到基于模型的管理。基于模型的系统正向设计方法是基于模型的系统工程(MBSE)在系统设计研制工作中的扩展和延伸,通过系统正向设计过程中信息传递的模型化,支持系统需求、设计、分析、验证和确认。基于模型的系统正向设计方法从飞行任务需求出发,自顶向下开展飞机级、系统级需求建模分析;接着,分配飞机级功能到系统级,开展系统级功能分析和架构设计;然后,通过构建系统的软硬件组件开展系统的非功能关键特性分析,优化系统架构。同时,通过测试工具完成基于模型的系统集成测试验证[18]。图5 为基于模型的正向设计流程图。
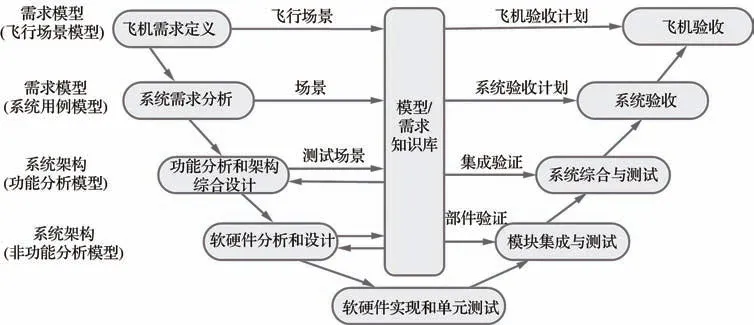
图5 基于模型的正向设计流程Fig.5 Model-based forward design process
随着美国工业互联网、德国工业4.0 以及中国制造2025 等先进制造战略的提出,智能制造已经成为全球制造业发展的重要方向,数字孪生(Digital Twin)作为智能制造中的关键技术,得到了国内外学者的广泛关注[19]。数字孪生是以数字化方式创建物理实体的虚拟模型,借助数据模拟物理实体在现实环境中的行为,通过虚实交互反馈、数据融合分析、决策迭代优化等手段,为物理实体增加或扩展新的能力[20]。美国空军研究实验室、美国国家航空航天局(NASA)基于数字孪生开展了飞行器健康管控应用[21-22],洛克希德·马丁公司将数字孪生概念应用于F-35 战斗机生产过程,提高了生产效率与品质[23]。波音提出了基于全生命周期信息流的飞机数字化研发模式的转型,借助建模与仿真的手段,从传统的“V”研发模式升级为“菱形”研发模式,如图6 所示[24]。“菱形”的下半部分代表物理系统(保留传统的“V”型开发模式),钻石的上半部分代表“数字孪生”(即物理系统的虚拟表示),通过在飞机的整个生命周期中物理系统与数字模型的连接,将需求域通过设计模型映射到解决方案域,支持系统的深度集成和实时反馈,便于迭代设计与优化。
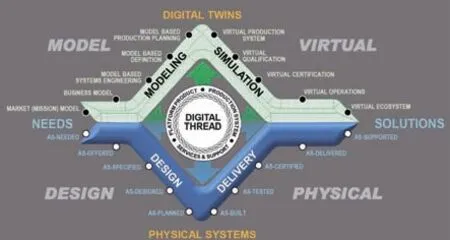
图6 波音提出的“菱形”研发模式[24]Fig.6 MBE“ Diamond” proposed by Boeing[24]
2.3.2 航空电子系统综合设计与验证技术
航空电子系统是飞机的“大脑”和“中枢神经系统”,其性能直接影响飞机的自动化和智能化水平。高效、合理的航电结构可以保证飞机的性能满足各种重要的要求,如安全性、对设备故障的鲁棒性、确定性以及实时性能。航空电子系统结构经历了分立式、联合式到综合式的发展进程[25]。在分立式结构中,雷达、通信、导航等设备各自均有专用且相互独立的天线、射频前端、处理器和显示器等,采用点对点连接。在联合式结构中,各单元之间通过数字总线交联,只在信息链后端的控制和显示环节进行资源共享。综合式航电系统又经历了2 个阶段,第1 个阶段是综合模块化航电系统(IMA),第2 个阶段是分布式综合模块化航电系统(DIMA)。第1 阶段又分为3 代,第1 代为互操作的子系统IMA,第2 代为专有的IMA,第3 代为开放式IMA。DIMA 系统构架是基于IMA 综合化思想,并针对子系统知识领域构建专业IMA 区域组织,采用分布式构架技术,在区域级的结构化综合和信息融合的基础上,构建系统应用的任务信息和任务合成。
未来支线客机的航电系统将采用“开放式”设计理念,主要体现在开放式通信标准、开放式处理平台以及开放式系统支持[26]。随着航空电子系统规模越来越大,系统构成要素越来越多,系统环境条件越来越复杂,任何单一的专业、能力和技术无法覆盖系统的应用领域、运行环境和能力类型的组织需求,无法支撑系统的目标形式、活动领域和性能范围的作用空间,无法提供系统运行效能、过程效率和结果有效化的优化过程。因此,新一代航空电子系统发展对系统综合化提出了迫切的需求。
综合化将航空电子系统的信息、资源、能力和过程综合起来,通过共享、集成、协同和融合,形成信息统一归集、资源统一配置、能力统一组织、过程统一协同、功能统一集成和系统统一管理,实现低成本、高效率、高效能、高性能和高可靠性的系统目标。它的特点是提供了一种综合的、通用的硬件及软件资源平台,使大量具有飞机功能的应用程序可宿主在该平台上;软件加载与硬件无关,易于系统升级和重构;物理资源和逻辑资源(如处理器、存储器、软件和数据等)可共享;通过鲁棒式分区使功能分离和独立,并且平台和应用程序级的健康监控和故障管理可支持资源共享。
已知航电系统组织是由任务、功能和资源3 层组织构成[27]。任务组织是基于多种模式、多种任务目标过程组织,功能组织是基于多种专业功能能力过程组织,资源组织是基于多种类型资源操作过程组织。而上述3 层组织过程必须实现目标过程、能力过程和操作过程综合化。因此,如图7 所示,航空电子系统综合设计技术由3 部分构成:①面向任务协同的任务合成,即针对不同的任务组织,系统具有不同应用需求,任务组织过程是基于飞机任务系统的应用目标组织,确定系统有效应用,实现系统任务组织目标和效果最优化;②面向功能能力的功能融合,即针对不同的功能组织,系统具有不同能力需求,功能过程是基于飞机任务系统的能力品质组织,明确系统有效能力,实现航电系统功能组织能力和品质最佳化;③面向资源效能的物理综合,即针对不同的资源组织,系统具有不同操作需求,资源过程是基于飞机任务系统的物理操作组织,建立系统有效资源,实现航电系统操作组织效率和有效性最大化。
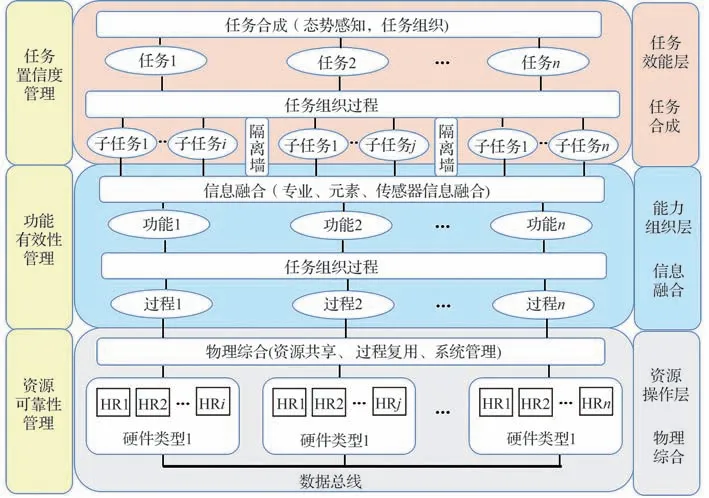
图7 航空电子综合化系统的层次结构Fig.7 Hierarchical structure of IMA
航空电子系统综合化是面向系统应用、功能和设备的组织和综合,通过复杂飞行过程的多种应用组织和综合,提升系统应用任务运行能力和效能;通过复杂系统环境的多种功能组织和综合,提高系统功能处理过程的品质和效率,通过复杂设备类型的多种资源组织和综合,增强系统设备资源共享和有效性,最终完成系统整体效能、效率和性能的提升。随着综合化程度增加,使得飞行员的工作角色从飞行管理者向任务管理者转变,而随着飞行操作需求的增加,为了提高任务执行能力,需要将一些任务通过自动控制系统来执行,任务合成就是基于当前系统能力状态和探测到的外部环境参数完成一部分决策的自动化,从而减轻飞行员的工作负荷。
综合航电系统由诸多子系统构成,为确保全部的航电子系统完成预定的系统功能,以及保证装机后能确保系统的功能正常,需要在民机综合航电系统集成与验证技术的基础上,搭建综合航电系统地面试验台,并完成地面综合试验。支线客机的航电系统设计验证以航电系统综合试验台Rig 为主要的试验系统平台,包括模拟驾驶舱、航电系统其他被测试验件、仿真激励设施(主要用于通信、导航设备的激励)、试验管理系统(ACS,包括主控平台和各试验系统管理模块,完成如构型管理、电源管理、配线管理以及试验系统自检维护等功能)、仿真系统(NGS,包括飞行仿真和各飞机系统的仿真)和测试系统(含试验数据监控和自动测试功能)。此外,采用动态无线通信导航仿真激励技术,将分布在地面、空中和高空的无线电台站“搬移”到试验室内,并能根据需要随意控制其参数和模式,以实现航电系统在试验室条件下的“飞行”验证。
2.3.3 系统集成设计与验证技术
机载系统集成贯穿了飞机的整个研制过程,包括概念设计、飞机功能定义和分配、系统架构设计、系统需求的分配、系统实现和验证、飞机级集成和验证等。支线客机的系统集成设计技术主要包括需求捕获和功能定义、系统集成设计和系统集成验证,如图8 所示。

图8 系统集成设计与验证技术Fig.8 System integration design and verification technology
1)需求捕获和功能定义
首先,对市场和运行需求进行捕获,通过市场需求分析、同类机型竞争分析、机场适应性分析、航线适应性分析和直接运行成本分析,形成支线飞机市场目标与要求MRO;接着,对MRO进一步分解和工程分析,提炼飞机设计目标与要求;进一步开展利益相关方需求分析和功能识别,形成飞机级功能。通过对飞机级功能评估,形成飞机功能危害性分析,确定功能设计保证等级。结合功能分析,捕获利益相关方需求,最终形成飞机级需求。
2)系统集成设计
通过飞机级功能和需求分配,可以形成系统级需求文档。在完成系统级需求定义的基础上,利用层次化、模块化、专业协同、设计迭代等方法开展设计综合活动。主要包括整理设计目标、需求和约束,开发备选概念方案、权衡并确定最终概念方案,开展详细设计和验证。为降低系统和产品研制的风险,飞机系统设计可以采用成熟度较高的系统架构和较多的货架产品。例如ARJ 21飞机采用高度集成和模块化的综合航电系统,应用数字化综合处理系统和集中式数据传输单元形成了飞机的神经网络,采用数字增强的多余度自监控电飞行控制系统形成了控制中枢。此外,接口关系的数量和复杂度会随着系统复杂性的提高而急剧上升,为确保接口的有效控制,通过规划接口管理活动、形成接口控制文件、管理接口的变更(作为构型控制的一部分)、开展接口的验证最终完成支线客机的接口管理。根据失效状态的严重程度(安全性评估的结果),确定飞机功能的研制保证等级FDAL,并向下分配形成系统、软硬件的研制保证等级。针对不同的研制保证等级裁剪过程保证的要求。对于软件还应适用于DO 178 B 的要求,复杂电子硬件适用于DO 254 的要求。为实现软硬件设计保证等级的管理目标,需要建立图9 的机载软硬件管理体系。

图9 机载软硬件管理体系Fig.9 Airborne software and hardware management system
3)系统集成验证
为保证系统间接口的正确性和匹配性,发现系统间集成问题,需要开展以航电系统为核心的总线网络和信号接口的集成试验。试验过程中以航电综合试验台为中心,集成各机载系统电子试验器mini-rig(系统控制器真机+系统仿真器),既可以保证交联接口的真实性,又可以降低试验成本。开展以铁鸟为核心的飞行控制关联系统集成和全机液压接口集成[28],试验过程接入真实的飞控系统、飞机传感器、自动飞行、综合航电、液压系统、起落架系统和反推作动系统等,并进行驾驶员在环试验,评估真实飞行控制系统的系统特性,检查液压接口的匹配性和动力性能。开展以电源系统为核心的全机电网络集成,试验中重要负载使用铁鸟试验台真实系统,其他负载采用电负载模拟设备,检查电源供电性能和接口的匹配性,以及电源瞬态对飞机系统的影响。
此外,还需要开展铁鸟、综合航电试验室和供配电试验室的交联试验,实现飞控系统、液压系统、起落架系统、航电系统、电源系统的多系统集成,便于检查系统间接口、系统共因故障和系统级联影响。在系统试验方案制定时就综合考虑各相关系统试验设施的配置,既有利于各相关系统的单独试验,又能进行多系统综合和交联试验,突破了传统试验方法中各系统试验“各自为政”的试验理念,创造了系统“大综合”的试验思路,同时又实现了可分可合的试验功能,保证了试验效率[29]。
2.3.4 安全性设计与验证技术
民机安全性设计理念经历了从绝对安全设计到失效安全设计的演变,主要可以划分为追求设计完整性阶段,“单故障”概念设计阶段和失效安全概念设计阶段。基于不同阶段的特征,衍生出了不同的民机系统安全性设计与评估方法。在追求完整性或增加有限设计特征冗余的阶段,提出了基于安全性试验的安全性评估方法,其评估内容以专业要求的方式给出,通过安全性试验进行评估验证,这是后续安全性评估的基础。在“单故障”概念设计阶段,基于“单故障”设计标准,提出了失效模式及其影响分析方法。该方法对每个单故障的影响进行分析,目前已普遍应用于安全性评估过程中。在失效安全概念设计阶段,更注重多重故障型事故。在更高的安全性需求下,原先飞机研制过程中的“试验-改进-试验”的“试错”方法受到了挑战,要求在飞机设计阶段就考虑安全性设计,以保障后续试验、制造、使用和保障的安全性。在此背景下,功能危险性分析、初步系统安全性分析、系统安全性分析、故障模式及影响以及共因故障分析等方法应运而生。
民机系统安全性设计一般受系统内外2 方面因素影响,因此,不仅需要考虑系统内部由功能失效引发的系统安全性问题,还需要考虑由系统外部特定事件引发的对系统乃至飞机的安全性问题。从满足适航条款角度,前者需满足CCAR25.1309 要 求,后者不 仅要满 足CCAR25.1309 条款,某些系统外部的特定风险还需满足其他特定条款要求,例如,鸟撞风险需满足CCAR25.571、CCAR25.631 及CCAR25.775条款;轮胎爆破风险需满足CCAR25.729f 条款,转子爆破需满足CCAR25.903d1 条款。在支线飞机系统安全性设计过程中,为表明CCAR25.1309条款及某些专门针对特定风险的条款的符合性,可以采用安全性设计目标的制定与分解技术、安全性目标的设计与验证技术,以及基于系统外部风险的特定风险分析与评估技术,形成系统安全性设计与验证技术体系,如图10 所示。

图10 安全性设计与验证技术Fig.10 Safety design and verification technology
1)基于失效安全的民机安全性设计目标制定及分解技术流程
初步系统安全性分析(Preliminary System Safety Analysis,PSSA)将安全性设计的目标进行逐级分解,以故障树分析方法(Fault Tree Analysis,FTA)分解到系统级和设备级(包括软件和硬件),制定各系统、各设备硬件、各设备软件的安全性设计目标。得到的安全性设计目标包括软硬件本身的设计目标,还包括因其他一些特定风险(例如鸟撞击、轮胎爆破、发动机转子爆破等)引发的飞机的安全性风险。最终形成以FHA-FTA-CCA-PSSA 为核心的基于失效安全的民机安全性设计目标制定及分解的技术。
2)基于失效安全的民机安全性验证技术
针对各系统设备(包括软件和硬件)的安全性设计目标,利用故障模式及影响分析(Failure Mode Effect Analysis,FMEA)、故障树(Fault Tree Analysis,FTA)、共因分析(Common Cause Analysis,CCA)等方法对其进行多方面的安全性评估(包括系统架构本身的失效状态以及一些特定风险引发的安全风险),其中还考虑了在后续航线运营中带故障飞行的情形以及“隐蔽故障”强制归零的状况,最终形成以FMEAFTA-CCA-PMMEL-CCMR-FHA 为核心的基于失效安全的民机安全性验证技术。
3)特定风险分析与评估技术
特殊风险分析技术是考虑系统之外系统遭受破坏后对系统乃至飞机的安全性影响。依据CCAR25.1309 及ARP4761,支线飞机需要考虑的鸟撞、转子爆破、轮胎爆破等3 种风险[30-31]。针对鸟撞和轮胎爆破2 种风险,参照ARP4761 的指导,可以采用仿真技术与实物试验技术相结合的特定风险分析与评估技术;针对转子爆破风险,参照AC20-128A 可以采用仿真技术与定量计算评估技术相结合的特定风险分析与评估技术。
以CCAR25.1309 条款为核心,CCAR25.1309等适航指导材料为基础,可以构建以ARP4761、ARP4754、DO-178B、DO-254等工业标准为支撑的支线飞机系统安全性设计与验证体系,详细流程如图11所示[17]。
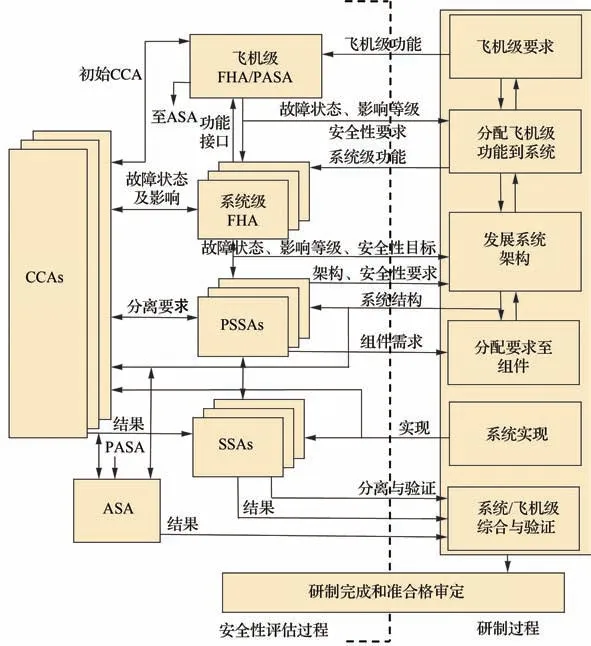
图11 安全性研制与评估过程[17]Fig.11 Safety development and evaluation process[17]
随着系统综合范围的扩大和综合程度的加深,任务组合模式将变得非常复杂,特别是任务综合带来的多重能力组织状态、多重过程状态组织和多重任务状态组织会导致系统故障状态难以确定、故障构成难以诊断的安全性问题。虽然传统的安全性分析方法(如危险与可操作性分析(HAZOP)、FTA、FMEA)已经发展的比较成熟[32-34],但都是人工方法,主要依赖于工程经验,并且与系统设计不是同步进行的。随着航电系统复杂程度的提高,很难列举出系统所有的失效模式和影响,同时由于系统设计的迭代,很难保证失效模式同系统架构的一致性。针对系统架构设计模型和安全性分析模型不一致的问题,可以采用基于模型驱动的安全性分析方法(MBSA)。基于模型驱动的安全性分析方法(MBSA)是以研究和实现复杂系统建模并基于系统模型实现自动或半自动化的安全分析及验证为目的的一类理论及方法的统称[35]。虽然MBSA 方法众多,技术手段千差万别,但核心目标是一致的,即实现系统设计模型与安全分析模型的统一,以及安全分析过程及结果生成的自动化[36]。
3 支线客机技术发展方向
3.1 支线客机先进气动布局
目前国内支线飞机市场的竞争主力已经从CRJ、E1 系列,变化成了现在的A220 和E2 系列。E2、A220 采用了目前最先进的发动机、气动设计、机载系统、先进材料,性能达到了较高水平;即使重新研发一款现有常规布局、动力形式的支线客机,E2、A220 的性能水平仍然是“天花板”级别,要想在未来超过E2、A220,实现“成为支线飞机领先者”的目标,必须打破现有构型限制。
在飞行器研制中,总体气动设计非常关键,直接影响飞行器的飞行性能和飞行品质,对飞机的飞行安全、飞行效率与经济性等都具有决定性的影响。未来支线客机的先进气动布局主要包括超声速布局、支撑翼布局、联接布局和飞翼布局,如图12 所示。其中,超声速布局可以进一步压缩空中飞行时间,提高支线飞机在面对高铁等其他交通工具时的竞争力,声爆和油耗是制约民用超声速飞行的两大难题,超声速商业飞行所涉及到的声爆、噪声控制等问题在较小型的支线飞机上解决起来也相对更为容易,因而超声速布局更适合50 座以下的飞机。支撑翼布局具有较高的升阻比和气动效率,但也受支撑翼大展弦比因素约束。支撑翼布局与常规布局通用性强,更适合200 座以下的飞机;联接布局具有高升阻比,更适合200~300 座的远程宽体飞机;飞翼布局在气动及结构减重方面具有潜在优势,但为了保证客货舱容积利用率,更适合300 座以上的客机。

图12 未来支线客机的先进气动布局Fig.12 Advanced aerodynamic layouts for future regional airliners
3.2 支线客机新能源
目前,全球航空业正在由提高燃油效率以减少碳排放的渐进式改革向开发新推进技术与新燃料的革命性变革转变,进而从根本上解决低碳排放问题。与传统飞机相比,电推进飞机在飞行过程中具有零排放和低噪声的优势,NASA 的研究也表明,电推进飞机可实现节能超过60%、减排超过90%、降噪超过65%的潜在收益[37]。但是基于各种条件的限制,商用飞机至今还无法实现完全由纯电提供动力。锂离子电池是目前在研电动飞机主要的能源,但是其能量密度仍然无法满足商用航空飞行器的要求。囿于储能系统的功率密度与能量密度,混合电推进技术是目前支线飞机发展的重要方向。传统燃油飞机在起飞、爬升、着陆、滑行阶段,发动机效率较低,而混合电推进技术恰恰是在这些阶段将电推进分系统投入使用,从而让燃油发动机维持在最优效率的状态下运行。对于中短程飞机来说,由于起飞、爬升、着陆、滑行阶段的时间占总飞行时间的比例较高,使用混合电推进系统能够显著节省燃油、降低噪音。因此从这个角度来看,混合电推进技术十分适合应用于航程较短、使用频率较高的支线飞机上。在目前众多的在研新机型中,空客的E-Fan X,波音投资研发的Zunum 和NASA的“STARCABL”是最具代表性的3 款机型[38]。
支线飞机的混合电推进技术采用储能装置与电机的组合提供额外的推力,运行模式灵活,能够有效提高飞机能量使用效率;推进系统布局灵活,可采用分布式布局、翼身融合等新型设计,为飞机构型设计提供广阔的空间。中国航空研究院提出了未来60~90 座混合电推进CAE-X2 支线飞机概念,航程约1 200 km。采用机身尾部螺旋桨边界层抽吸技术、混合电推进飞机能量管理和分配方案,预计2030 年技术成熟度达到6 级[39]。
此外,氢燃料作为清洁燃料,能够大幅降低支线飞机飞行过程中的碳排放水平,氢能航空被认为是航空业未来实现污染物零排放和可持续发展的关键。虽然氢能具有能量密度高、绿色环保等优势,但是目前氢动力系统技术尚不能满足航空飞行的需求,还需要大量的研究与验证。欧盟将从环境潜力评估、推进系统开发、飞机整合及安全认证这4 个方面进行氢动力系统的技术研究。在环境潜力评估方面,由于氢气燃烧产生的水蒸气会散发氮氧化合物,因此需要充分评估氢能飞机对环境的影响;在推进系统开发方面,氢燃料的储存、分配和燃烧系统将成为开发氢能系统的关键;在飞机整合方面,飞机的设计将向大体积方向迈进,混合动力布局或将具有一定优势;在安全认证方面,氢燃料需要加压储存,以解决燃料蒸发问题,因此飞机结构需进行冗余设计,并验证使用材料的兼容性。同时,需要重新开发安全认证环节,以保障飞机的安全性[40]。
3.3 支线飞机驾驶模式发展
随着民用航空客运量的持续增加以及航空物流的迅猛发展,民用航空市场对飞行员的需求越来越大,而飞行员的培养成本高、周期长,使得航空市场出现供不应求的情况。同时,随着飞行环境、空域交通的日益复杂,飞行环境感知、飞行状态识别、飞行航路组织和飞行过程管理对驾驶舱乘员的协同操作过程提出了非常高的要求,但是机上飞行员的感知能力、认知能力和响应能力有限,且协同过程中存在认知缺陷、思维偏离和操作不一致性,对飞行安全有一定影响。图13 描绘了未来商用飞机将呈现“双乘员驾驶模式—单一飞行员驾驶模式—无人驾驶模式”的发展趋势[41]。目前,商用飞机的运行大多是采用的是双乘员驾驶模式,即机长和副机长协同交互完成飞行驾驶操作。国内外许多学者已经开始对于单一飞行员驾驶的相关研究,并系统提出了单一飞行员驾驶模式概念和运行架构[42-46]。在商用飞机无人驾驶领域,已经有学者开展了将远程驾驶飞机系统(RPAS)融入空中交通系统的相关研究[47-52],并提出了商用飞机远程驾驶模式的概念架构[53]。
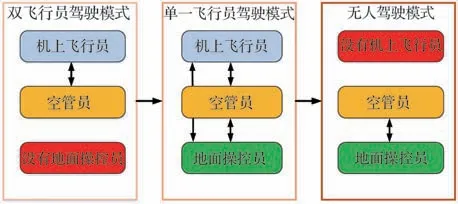
图13 未来商用飞机的发展趋势[41]Fig.13 Development trend of future commercial aircraft[41]
3.3.1 支线客机单一飞行员驾驶模式
商用飞机单一飞行员驾驶(Single Pilot Operations,SPO)模式是目前现代航空技术发展的一个重要方向。飞行员作为航空运营的关键资源,培养周期长,成本昂贵,而支线航空采取低票价、多频次的“短、平、快”运营模式,需要严格控制成本,加上支线飞机的驾驶舒适度比干线差,飞的频次又比干线高,加剧了支线航空的飞行员短缺问题[54]。多驾驶乘员虽然能减轻飞行员独立操作负荷,降低飞行员专业知识范围要求,但直接增加了飞行乘员的数量和成本,增加了飞机驾驶舱乘员空间需求,同时还增加了支持驾驶舱乘员的操作和协同设备。另外,在多乘员协同驾驶过程中,由于多乘员协同过程存在认知缺陷、思维偏离和操作不一致性,直接影响飞行驾驶决策和飞行过程组织的性能、效率和有效性,并对飞行安全产生一定的影响。对比而言,支线客机单一飞行员驾驶模式能有效降低飞行员配置成本,减轻飞行员短缺压力,缩小飞机驾驶舱空间和尺寸,减少驾驶舱显示系统配置,消除飞行员决策冲突,提升飞行员决策响应效率,具有十分重要的意义。国际民航组织规划SPO作为2030 年新一代民用客机运行的核心技术,根据美国FAA 预计,2030—2050 年将是商用飞机单一飞行员驾驶和双飞行员驾驶混合运行时代,国内外学者都在系统和深入地开展SPO 技术的相关研究[42-47]。
1)单一飞行员驾驶模式需求
支线客机单一飞行员驾驶模式的研究目标是覆盖目前双飞行员驾驶模式的驾驶操纵效率和品质,实现驾驶乘员最少化,消除飞行环境认识分歧和飞行任务组织决策冲突,减少飞行驾驶响应时间,建立航空公司地面操作员、管制员和机上单一驾驶飞行员一体化协同模式,实现基于飞行计划需求、基于空域交通、基于飞行状态的空地飞行过程协同管理。相对于目前双飞行员驾驶模式,单一飞行员驾驶模式下需要开展以下3 个方面的研究才能确保飞行安全:
①提高标称飞行覆盖率
飞机的飞行过程按照飞行员是否参与决策分为标称飞行过程(不需要飞行员决策)和非标称飞行过程(需要飞行员决策),其中标称飞行过程占整个飞机飞行过程的70%~80%,非标称飞行过程占10%~20%。对于支线飞机单一飞行员驾驶模式,必须提高整个飞行过程中的标称飞行过程的自动化水平,从而减少飞行员协同决策比例,最终降低单一飞行员工作负荷,确保飞机飞行安全。
② 感知单一飞行员驾驶状态
在单一飞行员驾驶模式下,无法像双乘员模式下通过视觉和听觉相互判断对方是否处于失能状态,从而避免由于飞行员失能而导致的灾难。因此,对于支线飞机单一飞行员驾驶模式,需要针对飞行员在不同飞行阶段的操作过程,通过驾驶舱感知设备建立驾驶舱感知环境来判断飞行员是否处于失能状态(包括身体原因的失能以及离岗等)或者飞行员操作逻辑是否规范,最终确保飞行员错误操作及失能状态判断不低于双飞行员驾驶模式。
③建立空地协同交互决策
基于飞机不同的飞行过程及飞行员操作,针对飞行员标称驾驶与飞行员正常能力条件、飞行员非标称驾驶与飞行员正常能力条件、飞行员标称驾驶与飞行员失能条件以及飞行员非标称驾驶与飞行员失能条件4 种模式,通过与驾驶舱自动系统的人-机交互决策以及与航空公司地面操作员的交互决策,建立单一飞行员模式空地协同交互决策机制,确保单一飞行员代替现有双飞行员驾驶工作负荷增加量不超出安全范围。
2)单一飞行员空地协同系统
为了实现单一飞行员驾驶模式能够覆盖目前双飞行员驾驶模式的驾驶操纵效率和品质的目标,需要建立航空公司地面操作员、管制员和机上飞行员一体化空地协同模式,即SPO 空地协同架构。支线客机的单一飞行员空地协同系统包含机上飞行员系统、驾驶舱自动化系统和地面操作员系统,如图14 所示。其中,机上飞行员系统按照飞行计划并实时监控飞行路径和偏离情况驾驶飞机,驾驶舱自动化系统进行飞行信息监控及飞行系统管理,同时通过认知人机接口、功能分配完成对机长能力状态的实时感知及任务分配,地面操作员系统通过数据链与机上飞行员系统实时通信及数据同步,完成不同驾驶模式的监控辅助或远程操控。所述的机上飞行员系统即机上单一飞行员控制的主驾驶辅助模块,其中:机上单一飞行员作为飞行机长,负责飞机飞行操作,主驾驶辅助模块负责协助主驾驶飞行员完成驾驶。
图14 单一飞行员驾驶模式组织架构图Fig.14 Organizational structure of SPO mode
所述的机上单一飞行员,是飞机飞行过程的主驾驶飞行员,作为飞行机长,负责完成飞行组织与飞行驾驶相关工作。机上飞行员需要按照飞行计划驾驶飞机,同时要实时监控飞行路径和偏离情况,及时对飞机状态进行调整。机上单一飞行员对应于双飞行员驾驶中的驾驶飞行员,在本身具备正常能力条件时,是飞机在空中飞行时的实际决策与操控者。如图15 所示,机长所有控制飞机的动作借助机载系统完成,获取的飞行信息也都来源于机载系统的采集与展示,机长通过语音通信、数据输入或显示触控的方式控制驾驶舱自动化系统,借助驾驶舱自动化系统可更高效地完成飞行任务,机长还可通过语音链路与航空公司地面操作员直接联系来协同决策。
主驾驶辅助模块用于辅助机上飞行员完成飞行驾驶与飞行组织,包括:飞行管理系统、座舱显示系统、通信系统在内的机载系统,这些系统的功能将在单一飞行员驾驶飞机中得到保留并进一步整合,其中飞行管理系统能够协助机上飞行员完成飞行计划与飞行导航,座舱显示系统能够展示飞行状态信息并对环境进行监视,通信系统可支持机上飞行员与地面航空公司操作员及空管中心实时沟通协同决策。如图15 所示,机载系统支持机上飞行员对飞机的驾驶控制,也支持将飞行信息同步给驾驶舱自动化系统,并根据驾驶舱自动化系统转发的控制指令完成对飞机的驾驶控制。
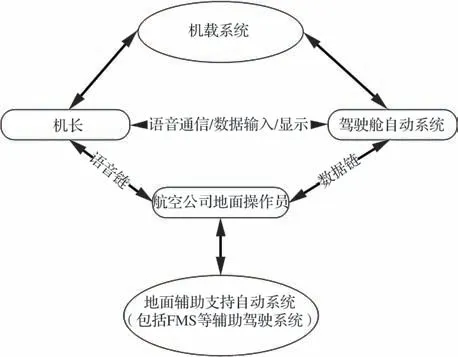
图15 单一飞行员驾驶系统交联关系图Fig.15 Cross-linking diagram of SPO system
驾驶舱自动化系统包括:通信管理模块、飞行环境监视模块、飞行综合管理模块、认知人机接口模块以及功能分配模块,其中:通信管理模块用于管理数据链路的指挥、控制及通信功能,飞行环境监视模块用于依据机载设备所采集的飞行环境信息进行融合决策,飞行综合管理模块用于进行航路优化及航迹组织,认知人机接口模块用于对机上单一飞行员的能力状态进行实时监控,功能分配模块用于针对当前任务需求,合理调配飞行员、地面操作员及自动化系统需要处理的工作。驾驶舱自动化系统能够确保在单一飞行员驾驶模式下,和双乘员驾驶模式下相比,不增加飞行员负担;同时,在飞行员无法正常驾驶飞机时,可通过该系统确保地面操作员掌控飞机完成飞行。驾驶舱自动化系统能够减少飞行员负担、减少驾驶舱复杂性、增加飞机系统监视能力、便于空地协同及信息共享。如图15 所示,驾驶舱自动化系统受机上飞行员的直接控制,同时也可受地面操作员的指令控制,并借助机载系统完成对飞机的设备组织与驾驶控制。
3.3.2 支线货机无人驾驶模式
近年来,中国航空货运需求不断增长,机队规模急需扩张。客机改货机是快速补充货机的普遍做法,2020 年6 月,成都航空一架经“客改货”改装的ARJ21 飞机搭载近5 t 普货快件从成都飞往深圳,完成过程支线飞机的首个“客改货”航班。为节约有限的空运资源,航空物流多半采用“红眼航班”,即夜间驾驶,给飞行员带来了不可避免的安全威胁。为应对飞行员数量短缺,培养成本高昂以及夜间驾驶安全性问题,提出将无人驾驶技术运用于“客改货”飞机。通过引入支线货机无人驾驶模式,可以有效降低货运公司的运营成本,提高飞机的利用率[55]。
支线无人驾驶飞机与目前双飞行员驾驶飞机相比,最大的差异点在于机上没有了飞行员和驾驶舱,传统显示在驾驶舱仪表系统中数据通过指挥和控制链(Command and Control Link,C2 Link)向下传输到地面站。由于没有了驾驶舱中飞行员通过舷窗观察机外信息,为了减少远程飞行员由于不在机上而导致的视觉信息损失,需要在机头加装若干个摄像头,以便实时监视机外信息,并通过机载数据融合与智能分析系统对数据进行分析,将处理后的有用信息通过C2链传输到地面站并显示给远程飞行员。目前受C2链带宽以及卫星传输费用影响,机上视频数据不下传到地面站,但地面站可以在接收到这些数据后,通过地面仿真模拟软件把数据进行可视化,以便远程飞行员进行决策。因此可见,支线客机无人驾驶模式需要可靠的通信链路支撑,国际民航组织(ICAO)发布了第6 版全球空中航行计划(GANP),明确提出了现代空中航行系统的具体实施路线——航空系统组块升级(ASBU)。其中指出,未来航空通信技术的路线图包含机场AeroMACS、航路LDACS 以及海事卫星等下一代卫星通信等宽带通信新技术。国内也开始规划“新一代航空宽带通信技术”的研究,包括5G AeroMACS2.0、5G LDACS2.0、5G ATG 及5G 公共网络等基于5G 的通信技术,在未来低时延、高可靠、大带宽特性的航空宽带通信技术的背景下,可以支持大容量的实时性数据传输,进而支持远程飞行员进行飞机决策和远程控制。
从心理学角度分析,远程驾驶飞机相对于在机上驾驶飞机的工作负荷更大,为了减轻远程飞行员的工作负荷,支线无人驾驶货机上需要有更多的自动化设备辅助远程飞行员驾驶飞机,从而确保飞行安全。例如,场面运行自动系统、机外信息监视与告警系统、自动起飞系统等。CCAR25 部中也指出,在飞行员驾驶飞机时,应尽可能使用机载自动系统驾驶飞机[56]。同时,为了进一步减少远程飞行员工作负荷以及提高空域利用率和飞行安全性,支线无人驾驶货机可以通过机载自主系统在空管授权的交通区域自主飞行,期间如果发生因气象等条件导致的航迹调整,或者结合飞行环境和飞机状态计算出的更节省燃油的优化航迹等,飞机可以通过分析本机状态,以及从空管那里自动获取区域内其他飞机的飞行意图等信息,计算出当前飞行状态下的最优航迹并报空管备案。因此,在机载自主系统辅助下,远程飞行员仅充当“远程副驾驶”的角色,监控飞机飞行即可。
支线无人驾驶货机系统包括支线无人驾驶货机、用于远程驾驶的地面站以及设置于地面站和商用无人驾驶飞机之间、为远程驾驶机组通过地面站操控飞机提供通信通道的指挥和控制(C2)链路,其中支线无人驾驶货机对飞行环境信息进行自动处理并通过指挥控制链路将处理结果按需输出至地面站、航空公司和空管中心,此外,还接收来自地面站的飞行控制指令,完成对飞机的远程操控。商用无人驾驶飞机系统架构如图16所示。
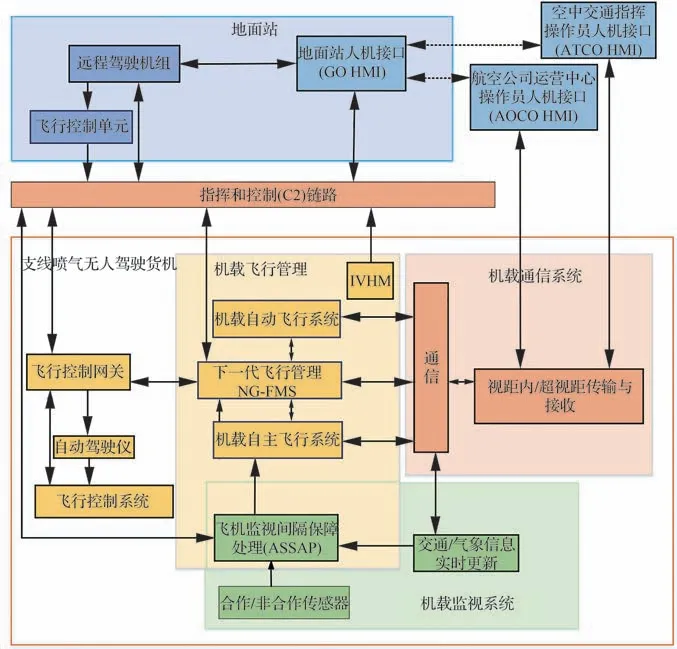
图16 支线无人驾驶货机系统架构Fig.16 System architecture of unmanned regional cargo aircraft
支线无人驾驶货机主要由3 个系统构成:机载监视系统、机载飞行管理系统和机载通信系统。其中:机载监视系统通过合作或非合作传感器输出飞行环境信息,或直接输出飞行性能信息至飞行监视间隔保障处理(ASSAP)模块进行监视数据处理和间隔保障处理,同时机载监视系统与下一代飞管系统(NG-FMS)交互完成基于监视的引导,从而减少地面操作员工作负担,确保飞行安全;机载飞行管理系统在机载自动飞行系统和机载自主飞行系统的支持下完成航路优化和航迹组织,并通过指挥控制链路将结果输出至地面站。机载通信系统建立起支线无人驾驶货机和地面站、航空公司、空管之间的数据链路,实现多方数据信息共享以支持协同决策。
4 面向智能飞行的自动、自主、人工智能组织模式
无论是在目前双人制驾驶模式下还是在未来的单一飞行员驾驶模式或是无人驾驶模式下,在飞行员驾驶飞机时,应尽可能使用机载自动系统驾驶飞机。同时,为了进一步减少飞行员工作负荷以及提高空域利用率和飞行安全性,还可以通过机载自主系统或智能系统在空管授权的区域内实现智能飞行[57-59]。因此,本节将重点介绍面向智能飞行的自动(Automation)、自主(Autonomy)、人工智能(Artificial Intelligence,AI)组织模式。自动、自主和人工智能(3A)组织是依据应用计划和任务,根据实施环境和条件,针对系统能力和特征,建立面向不同目标、环境、能力、性能的任务定义、确定、运行和控制管理。自动、自主和人工智能(3A)组织模式如图17 所示。
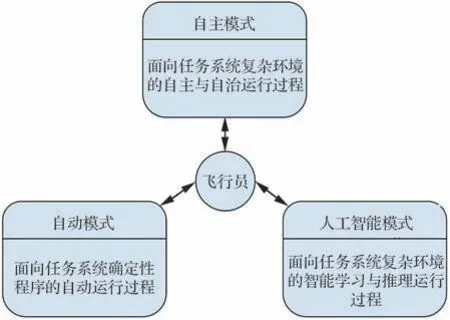
图17 3A 组织模式Fig.17 Organization mode of 3A
4.1 自动、自主和人工智能模式概念和任务
1)自动模式
自动(Automation)模式是面向任务系统确定性程序的自动运行过程。基于系统运行程序,针对运行程序定义的标称飞行过程组织与构成,自动模式提供规范的自动操作程序,最终完成标称飞行过程的自动化实现。对于非标称飞行过程,将交给自主模式(Autonomy)或飞行员进行控制与运行管理。
自动模式一般面向标称飞行过程,例如陆基巡航飞行阶段,通过调用预设在任务管理系统中的标准飞行程序来完成飞行任务和目标,是预先规划好的标称过程,不需要飞行员参与决策。
2)自主模式
自主(Autonomy)模式是面向任务系统复杂环境的自主与自治运行过程。基于任务系统需求,根据任务环境和运行状态变化引起的复杂性和不确定特征,建立任务环境分析和规划目标推理,提供基于任务运行环境的自主适应和调整过程,建立面向任务系统使命、运行环境和系统能力优化的任务系统运行过程组织,最终完成任务系统的自主和自治运行管理。
自主模式一般面向非标称飞行过程,依据后台的推理模型进行决策,是基于规则的智能,类似于人的经验。例如在遇到飞行冲突时,自主模式基于推理模型进行分析,提供不同的解决方案给飞行员进行决策。
3)人工智能模式
人工智能(AI)模式是面向任务系统运行过程复杂环境的智能学习与推理运行过程。基于机载智能化感知技术,监视空域其他飞机运行状态,构建当前飞行环境感知和空域飞行状态预测,智能协同运行管理,组织空域能力、空域流量、飞行性能的优化过程。
人工智能模式一般面向空管授权的空域内,在算法库的支持下对复杂空域环境进行分析与处理,按需调用不同的智能算法,并通过机器学习将经验和知识反馈到算法库[60],最终实现空域复杂环境智能飞行。
4.2 人工智能系统存在的不足
已知人工智能系统是面向飞行过程中存在的环境、任务、能力、组织、控制和管理存在的缺陷和不确定性。人工智能系统是基于机器的认知和推理能力,在人机一体化飞行过程中,存在以下不足和问题。
1)缺乏自然确认的思维
人工智能系统在任务处理和决策过程中,基于已有知识和规则进行组织和推理,无法事先进行事物变化结果的确认,不能提供确定的结果状态。而民机最主要的特征就是“确定性”,因此人工智能系统在适航取证方面还是任重而道远。
2)低透明度和可追溯性
人工智能系统建立在自身环境感知的基础上,是基于自身所持有的假设、所考虑的数据、所使用的推理方法等来“解释”事件和结果,无法给出真实世界的所有相关条件和因素,透明度低,可追溯性差,不能证明其解决方案集的确切性和合理性。
3)缺乏自我意识和环境意识
人工智能系统的有效性建立在自身有效性的基础上,如果人工智能系统和其组件包含有故障模式,或者出现环境条件变化和感知偏离,可能出现超出原本认知范围的情况,那么其结果将出现偏离和错误,影响人工智能处理的性能和有效性。
4)缺乏对共同目标的相互理解和协同
已知飞行过程是基于飞行员对当前场景感知、计划、组织和管理的决策过程,是基于飞行员的认知和思维过程,而人工智能系统是基于已有场景的感知、计划、组织和管理规则的推理过程。因此,飞行员和人工智能系统缺乏共同目标、任务约束、角色需求的一致理解,会导致认知和决策的冲突与偏离。
5)人机非天然的通信接口
已知飞行过程组织与决策是建立在飞行员与人工智能系统的支持和协同的基础上,由于人(飞行员)与机器(人工智能系统)之间缺乏传统的双向多通道通信(例如,语义、语调、面部表情、肢体语言等),不仅降低了通信数据率,而且存在信息丢失,特别是人的语气、声调、速度等含义的信息传递,导致协同能力、效率和有效性降低的问题。
6)未建立人机共同信任区
已知人(飞行员)和机(人工智能系统)对任何过程的处理是基于各自认知的独立感知、识别、分析和处理模式,通常不存在认知过程的共同信任区。因此在飞行员做决策时,无法判断处理过程中哪些是可信任的,哪些是不可信任的。
4.3 基于3A 的支线客机任务系统
在未来的支线飞机上,为了减轻单一飞行员/远程飞行员的工作负荷,飞机上将配备更多的自动化设备辅助飞行员驾驶飞机,从而确保飞行安全。例如,在标称飞行过程中,机载自动化系统通过调用预设在任务管理系统中的标准飞行程序来完成飞行任务和目标,此时飞行员完成飞行过程监视即可。同时,为了进一步减轻飞行员的工作负荷以及提高空域利用率和飞行安全性,飞机可以在机载自主系统的支持下完成空管授权空域内的自主飞行,机载自主系统通过分析本机状态和从空管那里自动获取到的他机的信息,计算出当前飞行状态下的最优航迹供飞行员决策,并报空管备案。此外,在面对更复杂的空域环境时,如果遇到未知的飞行冲突,人工智能系统可以通过智能学习与推理对复杂空域环境进行分析与处理,按需调用不同的智能算法,并通过机器学习将经验和知识反馈到算法库,最终实现空域复杂环境智能飞行。因此,本文提出了基于自动、自主、智能(3A)的支线客机任务系统。
4.3.1 任务系统智能化等级
支线客机的任务系统是典型的复杂系统,对于复杂系统管理的策略和方针应是“分而治之”(Divide and Rule)[61],飞机任务系统的处理应该是分层次、分等级的[62]。下一代支线客机任务系统智能化等级如表1 所示,在不同智能化等级条件下,任务系统组织与运行过程也不尽相同。随着智能等级的提高,系统感知能力逐渐由自动提升为智能,任务组织与处理过程逐渐由自动过程提升为全自主(智能)过程。智能化等级为1 级时,自动系统负责任务的所有方面,包括环境感知、生成计划/选项/目标和实现过程;当智能等级达到10 级时,智能系统自主完成任务的所有方面,无需自动系统和飞行员的干预,无需二者感知、规划或执行行动。
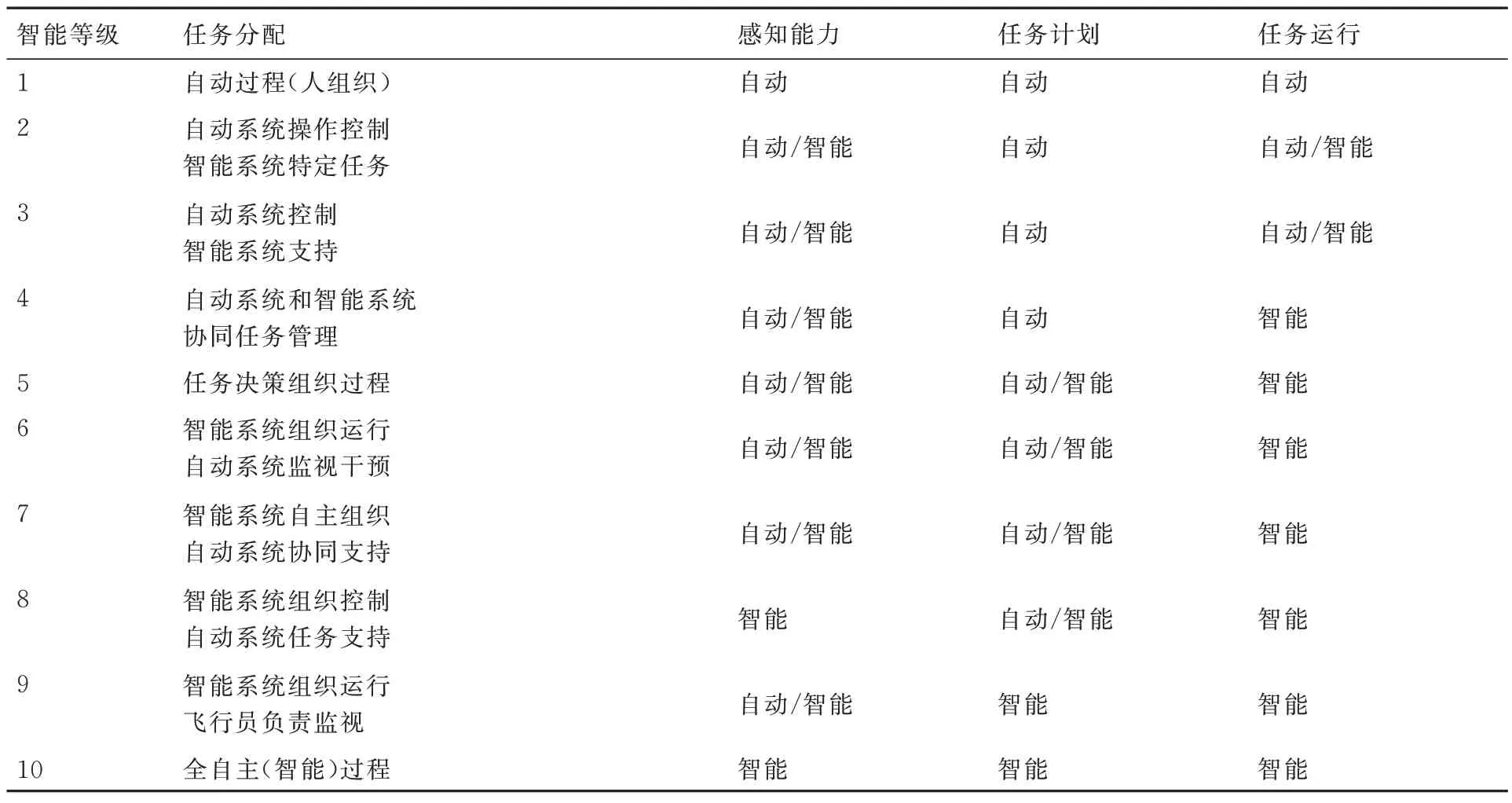
表1 支线客机任务系统智能化等级Table 1 Intelligent level in mission system of regional airliner
4.3.2 基于3A 的支线客机任务系统支持模式
在飞行任务运行过程中,针对不同任务需求,智能化组织与处理模式在系统思考(Think)、观察(Look)、协调(Talk)、组织(Move)、运行(Work)能力方面均有提升。下一代基于3A 的支线客机任务系统支持模式如表2 所示。对于思考层,基于飞行能力、作用域和结果知识进行推理,即针对飞行计划、任务能力和运行条件,建立空域环境、任务需求和任务结果推理过程,对预期的行为做出合理的预测,最终完成自适应飞行推理。对于观察层,建立面向飞行计划要求、飞行环境条件、系统能力的态势感知组织,支持任务系统智能理解、推理和归纳。对于协同层,构建基于任务需求和环境约束的人机协同决策过程,形成确定的飞行结果置信区域,支持飞行员/地面操作员决策。在组织层,3A 系统提供条件推理和状态归纳,形成有效置信区域的任务运行、能力和结果组织。在运行层,基于任务系统智能化等级,提供任务运行过程目标、条件和能力,支持任务运行过程动态组织和优化,建立基于不同智能化等级的任务自主运行管理模式。
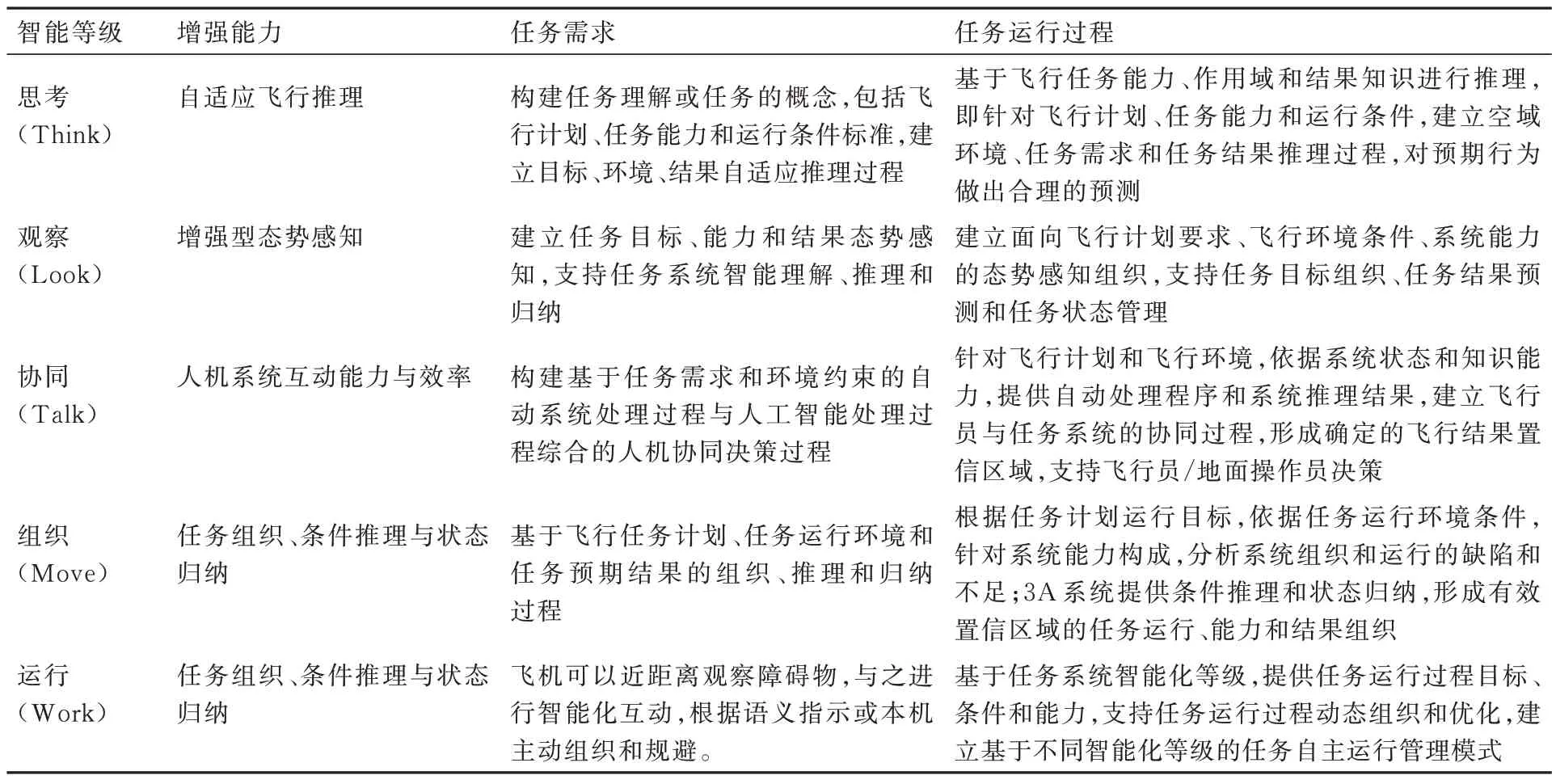
表2 支线客机任务系统支持模式Table 2 Mission system support mode of regional airliner
5 结束语
对中国来说,在包括支线飞机在内的民用飞机技术领域与国外先进水平仍存在一定差距,且国内干、支线航空发展不平衡的现象远比发达国家严重,从而进一步增加了支线飞机产业所面临的困境。因此,需要高度关注可能对今后支线飞机发展产生革命性影响的先进技术,如先进气动布局、新能源、混合动力、驾驶模式变革、智能飞行等,并及时进行预研攻关。今后一旦条件具备,可以随时开展与世界先进水平同步的全新一代支线飞机研发,并与国外同类产品争夺市场。
猜你喜欢
环球时报(2022-03-28)2022-03-28 15:14:59
环球时报(2022-02-24)2022-02-24 16:22:53
小哥白尼(军事科学)(2021年7期)2021-11-20 06:14:48
军事文摘(2021年19期)2021-10-10 13:28:40
民用飞机设计与研究(2020年4期)2021-01-21 09:15:32
意林·全彩Color(2019年4期)2019-05-11 09:07:26
儿童故事画报·发现号趣味百科(2017年4期)2017-06-30 08:09:31
中国工程咨询(2017年11期)2017-01-31 02:58:32
四川电力技术(2015年5期)2015-12-19 11:04:52
中国工程咨询(2012年12期)2012-02-13 02:46:42
