恶劣天气下近紫外波段的偏振成像技术研究
2023-02-06 10:20:10李皓,李沅,侯琪
计算机测量与控制 2023年1期
李 皓,李 沅,侯 琪
(中北大学 信息与通信工程学院,太原 030051)
0 引言
导航是载体运用光学、电学、磁学、声学等各种方法确定自身相对位置,进而实现由起点准确、快速、安全地沿着预定轨迹到达目的地的方法。而随着科学技术的进步发展,导航系统广泛应用于各个领域,如通信、航空等,因此对导航系统的可靠性和准确性提出了更高的要求[1]。常用的导航系统如卫星导航容易受到人为干扰,惯性导航有着误差随时间累计的缺点,根据大气偏振模式所提供的准确信息以及抗干扰能力请。误差不随时间累计的优点,天空偏振光导航成为了当下的研究热点。仿生偏振光导航是近年来发展起来的一种自主导航方法,其实质就是通过观测天空大气偏振模式从而获取到相应的偏振信息来完成导航。因此,天空偏振模式的研究对于偏振光导航至关重要[2-4]。现有的偏振光导航技术主要针对晴朗无云天气,并且获得了较为准确的定向精度[5-6]。然而在阴云等恶劣天气条件下,云层对大气偏振模式产生较大的干扰,无法获得准确的导航信息。因此如何在云层天气条件下获取准确的偏振信息,提高偏振光导航在多种天气条件下应用的可靠性成为一个重要的研究方向[7-9]。
2018年,桂林电子科技大学的刘小燕使用CE318全自动天空辐射计在桂林地区进行实际观测,对不同天气下红、绿、蓝3种波段的偏振图像进行采集,试验结果表明云层会降低天空偏振度,但并没有对不同波段的偏振图像进行横向对比分析[10];2019年,法国马赛大学Dupeyroux采用紫外光电二极管、步进电机驱动偏振片设计了一个针对紫外偏振光的单通道扫描式偏振光探测装置,并将其安装在仿沙蚁六足机器人上进行试验[11];2021年大连理工大学历祥对阴云天气条件下天空偏振模式做了研究,对不同波段的偏振模式进行实际观测,通过试验验证了阴云天气下紫外波段天空偏振模式优于可见光波段[12],但没有得到准确的导航信息对比结果。
针对上述问题,为了扩展偏振光探测器的环境适应性,降低云层对偏振信息的干扰,本文首先采用太阳光度计进行实际观测,通过数据分析验证近紫外波段对阴云天气偏振光导航存在优势,然后在阴云天气下搭建偏振信息导航传感器系统,对紫外波段的偏振信息进行探测,在不同的天气条件下进行室外试验,获取到准确的航向角信息并通过与可见光波段数据进行比较分析,验证了紫外波段在恶劣天气条件下采集偏振信息的优势。
1 导航机理分析
1.1 成像式偏振光传感器测试原理
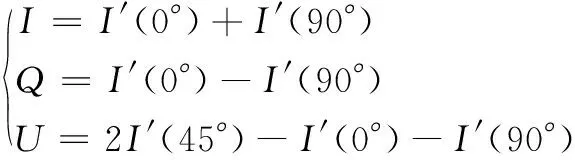
在大气偏振模式的研究中,斯托克斯矢量能够很好的描述入射光与出射光的关系。如式(1)所示,I为总强度,Q为水平方向的直线偏振分量;U为45°方向的偏振光分量,由于在自然环境中,偏振光的圆偏振分量很小,可以忽略不计。因此通过3个偏振方向的光强值就可以计算出入射光的斯托克斯矢量[13]。
(1)
要获取天空光的偏振特性,需要选取3个不同的φ带入式(1)中建立方程组求解I、Q、U。本文通过旋转偏振片使φ分别等于0°、45°和90°,获取结果如式(2)所示。
(2)
测试天空光的偏振度Dop和偏振角Aop分别表示为:
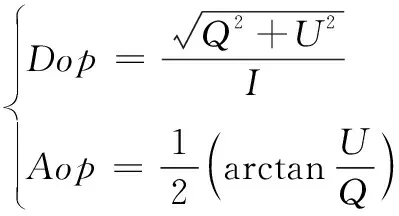
(3)
偏振方位角AOE由天空导航坐标系中某观测点的偏振方向矢量和太阳子午线切线方向的夹角构成,计算公式如式(4)所示,其中(i,j)为图像中像素点的坐标;h,w分别为图像的高和宽[14]。
AOE=
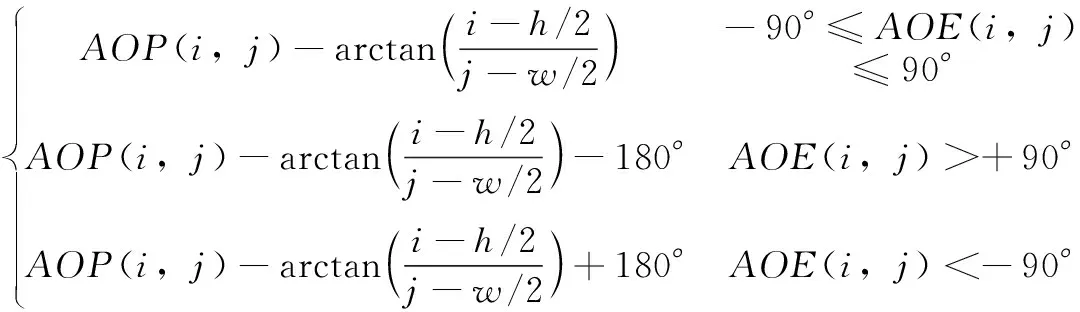
(4)
由式(3)和式(4)计算得到的偏振度和偏振方位角图像实际上为一个列为图像宽,行为图像高的矩阵,偏振度矩阵在太阳子午线和反太阳子午线方向上能观察到两个偏振度最低的点,即为中性点,偏振角矩阵取值[-90°,90°],沿太阳子午线呈对称分布,这一分布模式即为大气偏振模式,包含全天空的偏振信息。相比于偏振度分布模式,偏振方位角分布模式受天气的影响较小,始终关于太阳子午线对称,对外界大气变化具有更好的稳定性。因此,偏振方位角分布模式稳定性更好,更加适合作为偏振光导航的导航信息源,利用太阳子午线方位角信息获取航向角更为准确。通过直线检测方法确定太阳子午线的位置后将拟合的直线与参考坐标系正北方向的夹角作为太阳子午线方位角,实际太阳方位角可由定位授时设备提供的位置时间信息配合日梭万年历推导的太阳方位角公式进行解算,进而求得载体航向角。载体航向角βh和太阳子午线的关系如图1所示。

图1 航向角与太阳子午线和正北方向的关系
实际太阳方位角βs可以通过以下公式解算,解算时必须通过太阳时角h进行计算;
(5)
其中:ω表示地理纬度,δ表示太阳赤纬,θs表示太阳高度角,可用如下公式解算:
θs=arcsin(sinωsinδ+cosωcosδcost)
(6)
t为太阳时角,表示天子午圈与天体的赤纬圈在北极所称的球面角,或者是在天赤道上所夹的弧度。在地球上进行观测时,同一时刻,对同一精度、不同纬度的人来说,太阳对应的时角时相同的。由于地球自转,太阳时角每小时增加15°,可直接用时间取代太阳时角,用0~24时代替0°~360°。太阳时角t于北京时间ts的关系如式(7)所示,其中κ为当地地理经度。
(7)
太阳的位置可能会位于如图1示的第一象限,也可能会位于与上图相反的方向即第三象限,利用太阳子午线解算方位角信息时无法准确的找到太阳的位置,这会导致在航向角的计算过程中会出现两种结果,这种现象被称为太阳子午线的二义性问题。为了得到准确的航向角数据,需要在获取太阳子午线方位角信息的同时准确地得到当时太阳的具体位置。由偏振度图像的分布规律可知,偏振度关于最大偏振度线对称分布,再结合其以中性点为中心呈环状分布以及太阳附近的偏振度为0的特点,可以得到以最大偏振度线为对称轴的偏振度两侧分布中,有太阳一侧的偏振度总和要小于无太阳的一侧,由此可以得到太阳的位置信息,从而消除太阳子午线二义性对航向角计算结果的影响[15]。
1.2 太阳子午线提取方法
偏振光方位角分布模式以太阳子午线为轴呈对称分布,在理想大气条件下,偏振光分布模式中太阳子午线是一条直线,但是在实际试验过程中,在大气中的大颗粒物以及云层的干扰下,此时的天气条件并不完全符合Rayleigh散射理论,还会伴随有Mie散射的发生,这会使得太阳子午线的位置发生偏移、弯曲,为了能在恶劣天气条件下提取到准确的太阳子午线信息,本文选用基于Hough变换的太阳子午线提取方法,并使用成熟的边缘检测图像处理技术提取太阳子午线区域,结合对称性分布关系解算出准确的太阳子午线方位角。
Hough变换是一种从图像中提取直线的常用方法,检测直线在图像中穿过最多的相关点,受噪声的影响比较小。它采用表决方式来估计直线的特征,找出图像完成边缘检测后的边缘点及其所有可能经过该点的直线,将这些直线由直角坐标系转化为极坐标系方程来表示,这些参数方程在Hough空间内会交于一点成为Hough峰值点,提取该点即可得到边缘点所成直线的表达式。不同的边缘检测算法和直线拟合算法会受到图像像素大小、噪点和边缘灰度值突变程度等的影响,从而干扰大气偏振模式图中太阳方位角的解算结果。为了验证基于Hough变换的太阳子午线提取方法的可行性,通过仿真实验与最小二乘法拟合太阳子午线方位角的检测方法进行对比,观察在理想情况下使用检测算法解算太阳子午线偏转方向的准确程度。为了得到较好的边缘检测效果,选用在太阳子午线边缘检测方面具有很好性能的Canny算子,该算子通过高斯平滑降噪、双阈值算法检测以及连接边缘等操作达到最优的边缘检测效果,对比结果如图2所示。

图2 Canny 算子下 Hough 变换与最小二乘法拟合结果对比
从图2中可以看出,Canny边缘检测算子下使用最小二乘法拟合太阳子午线出现了比较大的偏差。观察结果图形可以看出,该边缘检测算法在图像中心出现噪点,使得特征点分布发散,由于最小二乘法会将检测到的所有特征点进行直线拟合,噪点的出现会严重干扰拟合结果,降低最小二乘法拟合太阳子午线的精度,甚至影响航向角的解算结果。而Hough变换是检测直线在图像中穿过最多的相关点,噪声对Hough变换的影响较小,所以提取的结果更为准确,更适合作为太阳子午线的提取方法。
1.3 阴云天气适应性设计
云是最常见的天气现象,尤其在海拔较高的黄土高原,扬尘、阴云以及雨雪天气时常会有,大颗粒的扬尘、云层中的水滴等会对入射太阳光产生散射作用,会影响太阳光在大气中的传输路径,进而影响实际采集到的的天空偏振图像,因此天气条件对天空偏振模式探测结果的影响也不可忽视。在多云天气下使用由单反相机搭配鱼眼镜头组成的偏振成像探测装置对可见光波段的天空图像进行观测,所得灰度图和偏振角图像如图3所示[16-17]。
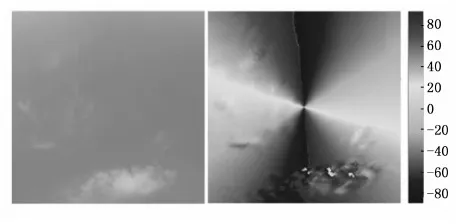
图3 云层对天空偏振角的影响图
由图3可知在云层的干扰下,偏振角图像出现扭曲、弯折和噪点等情况,导致太阳子午线识别出现误差甚至错误,干扰方位角解算结果,给偏振信息观测造成了不便,使其无法为导航提供较为清晰的方向参考依据[18]。
为了在不同天气条件下获取精确的偏振信息,就必须降低甚至消除云层对偏振模式的干扰。根据昆虫对偏振敏感波段的研究,本文使用全自动太阳光度计对大气中不同光波段的辐射量和偏振模式进行观测。太阳光度计安装有中心波长为340 nm、380 nm、440 nm、500 nm、675 nm、870 nm、 936 nm、1 020 nm和1 640 nm半波宽度为10 nm的9个窄带滤光片,可同时观测这九个波段区间的太阳辐射数据[19-20]。如图4所示。

图4 全自动太阳光度计
我们在可见光和近紫外波段通道前加装简易的偏振片旋转装置,在晴朗天气、阴天薄云、阴天扬尘、阴天厚云天气同时观测多个波段区间的太阳辐射数据并求解偏振度。观测结果如图5所示。
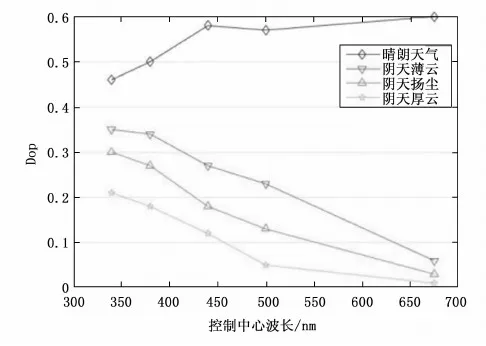
图5 不同波段下的天空偏振度结果
由图5可知,晴朗天气下可见光波段偏振度要优于近紫外光波段偏振度;而在云层的干扰下,近紫外波段偏振度表现出更好的稳定性,随着天气条件的恶化,近紫外光波段偏振度衰减程度较小,验证了近紫外波段对阴云天气偏振光导航存在优势。选择在有云层时,使用350~360 nm的近紫外带通滤光片使感光器件只接受这一特定波段的入射光,提高系统的环境适应性[21-22]。
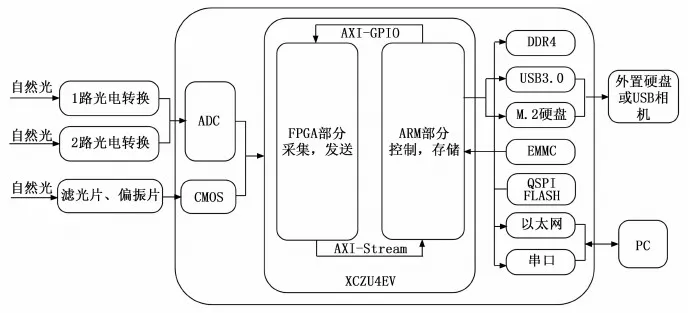
图6 偏振信息导航传感器系统整体结构示意图
2 偏振信息导航传感器系统介绍
2.1 偏振信息导航传感器系统总体方案
由于室外试验需要较长的时间并且拍摄环境受天气影响较大,因此对传感器装置在集成度、稳定性和便携性方面提出了较高的要求。本文选用小型工业相机和光电二极管来同时采集可见光波段和近紫外波段的大气偏振模式,设计了一套偏振信息导航传感器系统,该系统以Xilinx公司的ZYNQ UltraScale+TMMPSoC XCZU4EV为主控芯片。
ZYNQ UltraScale+TMMPSoC系列芯片是Xilinx公司设计生产的第二代平台,以ARM处理器为核心将FPGA和视频编码器等部分集成起来,并且还包含了内部存储器、外部存储器接口(DDR)和大量外设(IOU),外设主要包含USB、以太网、IIC、UART等。既可以安装Linux操作系统,充分运用该操作系统驱动完善、例程丰富和开发简单的优势,又能利用FPGA的多种高速IO高速采集传感器数字信号进行处理运算,各部分在芯片内部通过AXI高速总线进行连接。ZYNQ芯片的部分性能参数如表1所示。
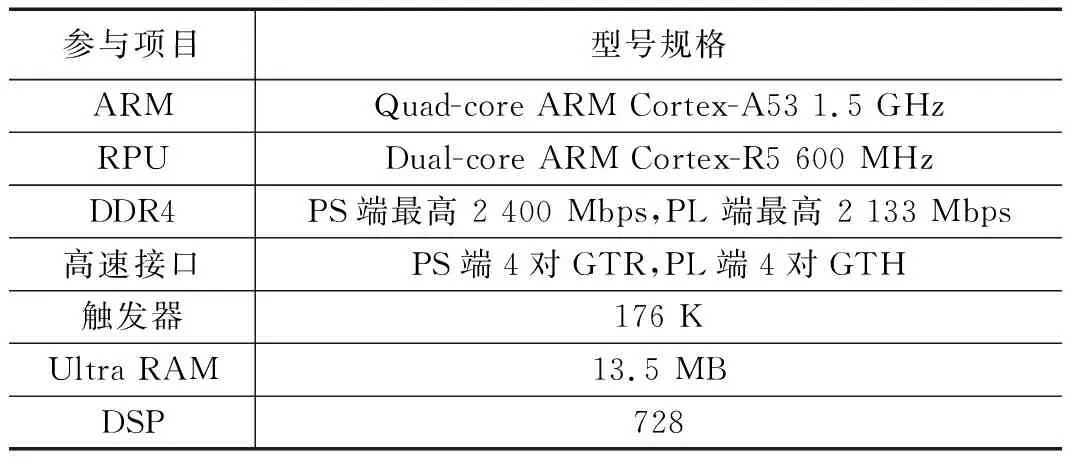
表1 芯片部分性能参数
传感器系统主要由光学检测模块和采集存储模块等部分组成,如图6所示为系统的整体结构图。天空中的部分偏振光经过滤光片和偏振片后由紫外增强型光电二极管和COMS图像传感器接收,转换为可阅读、可操作的数字信号,最后可选择在机内存储解算或由网口发送到上位机进行存储解算。
为了提高系统适用性的同时也能简化设计结构,选用由ALINX(上海芯驿电子)设计生产的ZYNQ核心板,采用14层PCB,PS端和PL端分别集成4 GB和1 GB DDR4 内存,PS 端板载8 GB EMMC和 QSIP FLASH 供存放启动文件和系统。
2.2 系统光学探测模块
偏振信息光学探测部分主要由一个SUA133GM 单色CMOS图像传感器构成的光学相机,两个紫外增强型光电二极管组成。根据单色COMS图像传感器的光谱响应曲线可以得到,相较于可见光波段,350 nm紫外波段的量子效率较低,而紫外增强型光电二极管可以很好的弥补这一不足,能更好的获取紫外波段的偏振信息。
相机的感光CMOS(互补金属氧化物半导体)上覆盖有可旋转的线性偏振膜,每旋转三次为一组分别捕捉大气中的部分偏振光经过3个方向的线性偏振膜后形成的完全偏振光,光信号经由SUA133GM 内部的10-bit ADC和外置的图像处理器转换成USB3.0协议的差分信号,通过 USB3.0协议芯片接入ZYNQ对应的 Bank65相关引脚,采集图像通过插值方式提高像素。原理流程如图7所示。
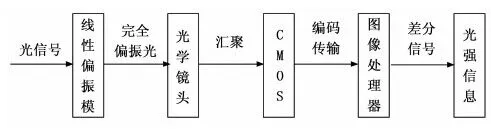
图7 图像传感器模组原理图
载体在复杂运动状态下,传感器晃动幅度较大,CMOS 图像采集时为逐行采样或隔行采样,尽管CMOS采用全局快门技术也避免不了高速瞬时运动时一帧画面出现倾斜变形,高帧率相机成本较高,同时也面临高功耗和高发热压力,因此选用紫外增强型光电二极管来弥补传感器的这一弱点。该二极管具有体积小、探测灵敏度高的特点,加入在5 V偏置电压时响应时间为8 ns,其可探测光波段覆盖了近紫外光、可见光和近红外光,满足实验需求。光电二极管在加入窄带滤光片后进光量会大幅降低,导致感光面接收不到足量的光信号,导致响应电流变弱,因此可以在上方嵌入一个平凸镜使得入射光汇聚在感光面上,从而增强光电二极管在弱光下的探测能力。实现带有旋转偏振片的两个高灵敏度紫外增强光电探测器对变化的光信号进行探测和处理的过程,保证了对天空偏振信息的快速扫描检测。

图8 PS端M.2硬盘原理图
在光学镜头前加装可切换的窄带滤光片,在其中一个紫外增强型光电二极管上方永久嵌入一个同样的窄带紫外滤光片,用来增强紫外波段的传输效率。该滤光片中心波长CWL为355 nm,半峰全宽FWHM为10±2 nm。光电二极管在线性偏振片旋转扫描自然光时,会输出一个稳定的正弦电流信号,由于自然光为部分偏振光,光电二极管产生的正弦电流信号会有一个稳定的直流分量。在解算偏振信息时,我们仅关注不同偏振片角度下信号的变化量。系统的光学探测模块实现了可见光、近紫外光的交替探测,为阴云天气下两种波段的偏振信息的比较分析提高了理论依据和原理介绍。
2.3 系统采集存储模块设计
2.3.1 存储模块硬件电路设计
由于数据采集时间长、采样率高,且设备处于初试阶段,希望储存完整的原始照片和角度等数据供后期解算分析,这对系统的存储部分提出了较高要求。本文选择将启动文件放置在QSPI FLASH中,把系统文件放置在EMMC中。本文选用型号为MTFC8GAKAJCN-4M的EMMC芯片,支持标准的HS-MMC接口,与ZYNQ芯片的连接数据位宽为8 bit。EMMC的实际读写速度为30 MB/S,在XCZU4EV的PS部分中选择一对GTR来存放M.2硬盘,并选用独立差分时钟芯片为M.2硬盘的主控芯片提供差分时钟信号,设计电路如图8所示。采用PCIE2.0编码,使得信道带宽的20%被占用,并且由于PCB差分走线的电气性能和硬盘主控读写纠错算法的损耗,因此在Linux系统中使用dd命令测试设计M.2外置硬盘的实际读写速度为300~350 MB/s。
2.3.2 网络传输模块硬件电路设计
数据采集装置在远程控制和远程数据传输时,需要连接计算机进行操作,这就需要一个稳定可靠的远程数据连接方式。TCP/IP(传输控制协议/网际协议)指能够在多个不同网络间实现信息传输的协议簇,里面包括很多协议,UDP就是其中之一,被广泛应用于各种网络设备的连接与控制中,具有通信速率高、传输距离远、传输稳定等优点。TCP是面向连接的协议,一次 TCP连接需要进行三次握手过程。UDP是一个非连接的协议,传输数据时发送端和终端不需要建立连接,相较于 TCP协议数据开销较小,但丢包率高,常用与传输网络摄像头等数据量较大的数据类型。
从PS端 Bank502引出引脚驱动RTL8211FD以太网芯片,为系统提供远程网络控制和部分数据传输功能。通过连接路由器或直连计算机实现远程控制、远程访问 Linux 系统共享文件夹,下载采集的偏振图像、不同偏振方向光电二极管的电压和解算的航向角等数据,该芯片可与主从设备自主协商提供自适应1 000 BASE-T、100 BASE-TX和10 BASE-T以太网速率,兼容性较好。PL端直接引出XCZU4EV的PL部分的四对GTH收发器,将其中两对引出作为万兆SPX+光口,用于发送采集到的数据量较大的偏振图像。
2.3.3 USB传输模块硬件电路设计
USB(通用串口总线)是一种外部总线标准,它建立了计算机与外部设备之间的链接,可以很好的作为外部数据存储接口和人机交互接口。本文选用MICROCHIP(美国微芯)公司生产的USB3320提供USB2.0协议的数据收发,设计电路如图9所示。通过外接MLC硬盘测试USB3.0接口的读写速度,读出40 G大小,写入4 G大小保证读写不出SLC缓存,由于硬盘主控等的损耗,实际读写速度要比测试值大。
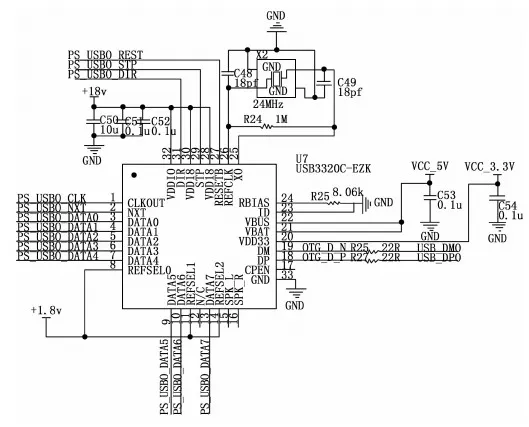
图9 USB3320硬件电路设计
3 不同天气下近紫外波段优势实验验证
3.1 大风薄云天气实验分析
在如图10所示的大风薄云天气,选择在中北大学科学楼B座楼顶进行试验,观测时间为2021年10月21日11:00~13:20,当地经纬度为 112.444 83° E,38.017 19° N。通过设计的导航传感器系统实现可见光波段和近紫外波段天空偏振信息的交替采集。在接收近紫外波段半波宽度为10 nm的近紫外光时,由于滤光片的减光性,进光量会剧烈下降,我们将快门速度从1/1 000 s下降到15 s,使得采集得 UV 波段试验图像较可见光波段试验图像的曝光程度相同且维持画面噪点水平不变。由图11可以看出,UV波段采集大风薄云天气依然可以解算出较为清晰的偏振角图像,太阳子午线的位置信息也比较容易获得,相较于可见光波段受云层干扰较大,图像以噪点为主,几乎难以分辨的问题,紫外波段图像的数据阅读性优势明显。

图10 大风薄云天气情况

图11 薄云天气紫外波段的偏振角图像
用太阳方位角补偿解算的子午线角度得到航向角,取每时刻前后100个航向角数据的平均值作为该时刻的航向角数据。由于在实验过程中,采集装置一直处于静止状态,可将补偿结果作为当前天气状态下系统室外采集试验的误差参考。薄云天气的航向角结果如图12所示,相较于可见光波段,UV波段解算的航向角误差降低了60.68%。因此UV波段的窄带滤光片可较大幅度提升偏振光导航的数据精度,扩展偏振光探测器的环境适应性。

图12 大风薄云天气下的航向角解算结果
3.2 积雨云天气实验分析
选取2022年4月20日16:00,积雨云天气采集偏振图像,研究紫外成像装置在云层较厚天气下偏振模式的获取情况,地点同样在中北大学科学楼B座楼顶,如图13所示为部分时间段测得的可见光波段和紫外波段的偏振图像。通过对比可以看出在恶劣天气下使用紫外滤光片可以提升偏振度,降低云层对偏振角图像的影响,提高太阳子午线的辨识度,部分区域仍有所弯折扭曲是因为紫外滤光片镀膜均匀性不一致所导致。由表2可知,积雨云天气条件下UV波段解算得航向角误差明显低于可见光波段,表明在多云天气下使用紫外波段进行探测仍能获得较为准确的导航精度,验证了紫外波段在恶劣天气条件下采集偏振信息的优势。
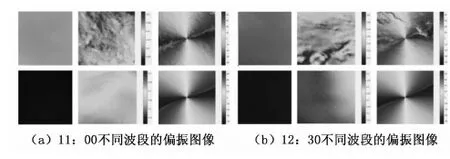
图13 积雨云天气试验灰度图和偏振角、偏振度图像
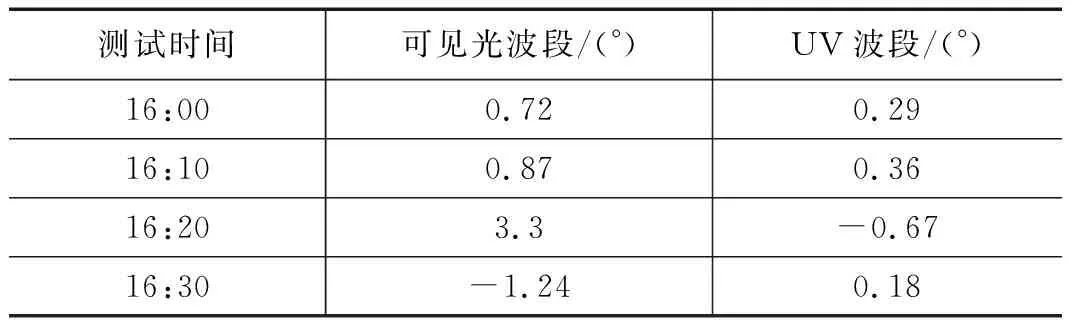
表2 积雨云天气下的航向角试验误差结果
4 结束语
为了在阴云天气条件下获取稳定的大气偏振模式,提高偏振光导航的天气适应性,本文分析近紫外波段在不同天气条件下的优势,设计了基于现场图像采集的偏振信息导航传感器系统,在气象条件不佳时,选用紫外滤光片进行探测。通过试验验证了近紫外波段在恶劣天气条件下采集偏振信息的优势,可以更好的作为组合导航系统的补充。
本文后续的主要工作是进行试验误差分析,优化动态实验误差偏大的问题,提高恶劣气象条件下航向角的探测精度。使用一体成型的光学探测模块和镜片自动清洁装置,优化配置精度,境地灰尘和雨雪混合物对数据准确性的影响,从而实现不同天气条件下更高精度的偏振光导航。
猜你喜欢
空间电子技术(2020年5期)2020-03-11 09:12:16
微处理机(2019年5期)2019-11-06 00:28:02
现代职业教育·中职中专(2018年11期)2018-06-11 11:17:57
光学精密工程(2016年3期)2016-11-07 09:03:38
中国机械工程(2015年13期)2015-12-16 12:25:40
橡胶工业(2015年10期)2015-08-01 09:06:00
橡胶工业(2015年6期)2015-07-29 09:20:36
橡胶工业(2015年1期)2015-07-29 08:33:52
中国中医药现代远程教育(2014年14期)2014-03-01 04:27:25
大学物理实验(2013年3期)2013-10-25 02:47:20