基于Netvlad神经网络的变磁力吸附爬壁机器人控制系统设计
2023-02-06 10:19:40左浩
计算机测量与控制 2023年1期
左 浩
(西安汽车职业大学,西安 710600)
0 引言
Netvlad是一类经典的非可导函数,其主要的不可导条件在于任何一个数据节点都只代表一个符号函数,在求解过程中,无论数据单位取值怎样变化,该符号函数都不会具有真实含义[1]。为了激发Netvlad函数的可导性,在推导函数表达式时,应对所选取数据单位进行平滑与可微分处理。如果一个数据单位的可导函数权重无限接近“1”,则整个函数表达式的取值结果就无限接近“0”;反之,若函数表达式取值无限接近于“0”,则无法得到数据单位可导函数权重无限接近“1”的推论[2]。Netvlad神经网络是以Netvlad函数为基础构建的网络应用结构,可以根据不可导条件确定数据单位的当前排列形式是否满足可导性推论,一般来说,同时满足不可导条件与可导性推论的数据单位即为网络体系内的连通节点,而单独满足不可导条件或可导性推论的数据单位即为非连通节点,既不满足不可导条件也不满足可导性推论的数据单位为零节点。
变磁力吸附机器人是特种机器人中的一种,融合了吸附技术与地面移动技术,可以附着在垂直壁面上,并在其表面进行自由移动。根据工作环境的不同,变磁力吸附机器人主要具有有线遥控控制、双履带移动、永磁吸附等几种常见的工作形式[3]。大多数变磁力吸附爬壁机器人都需在PLC控制设备的支持下才能进行移动,故而其移动速度与负重能力都相对有限。在大型建筑结构外表面不能保持完全光滑状态的情况下,机器人与运动平面之间的吸附紧密性会大大下降,而这也是导致机器人自由避障能力无法达到要求标准的主要原因。文献[4]设计了基于多传感器融合的机器人移动控制系统,采用STM32F405高速率芯片提供主控驱动力,再按照一体化控制原则,安排传感器元件所处连接位置,又根据比例积分微分思想,确定机器人移动过程中,路径曲线的偏转情况。然而此系统应用能力有限,不能有效控制运动节点实测距离与建模图实测距离之间的差值水平。
为解决上述问题,设计了基于Netvlad神经网络的变磁力吸附爬壁机器人控制系统。根据PCB控制原则,采用外置SRAM芯片传输电力信号,利用图像传感器和角度传感器获取机器人的运动图像,控制机器人角度变化,通过驱动I/O口电路和气动阀门,控制系统电量和运动速度,提高系统的稳定性。在此基础上,通过Netvlad 层和神经损伤函数构建Netvlad神经网络,对程序任务进行划分,计算和处理相关参数,可以提高变磁力吸附爬壁机器人的避障能力。
1 变磁力吸附爬壁机器人控制系统硬件结构设计
变磁力吸附爬壁机器人控制系统由外置SRAM、传感器模块、驱动I/O口电路、气动阀门等多个硬件结构共同组成,具体设计方法如下。
1.1 PCB控制
变磁力吸附爬壁机器人工作环境复杂且恶劣,因此在设计相关应用部件时要考虑工业抗干扰性要求,同时也要遵循PCB控制原则。PCB(printed circuit board)控制指利用印制线路板对变磁力吸附爬壁机器人进行控制。具体控制规则如下:
1)“3倍”规则与器件去耦规则:外置SRAM芯片、图像传感器、角度传感器等硬件设备结构的线间距应保持为3倍线宽,设备与设备之间的连接多采用总线结构与滤波回路,避免耦合性电路回路的出现[5-6]。
2)完整性规则与方向控制规则:主变电回路与下级硬件设备之间的连接至少采用导通孔,以确保电量回路的完整性,所有电力连接线只能由高压端指向低压端。
规定x表示一个随机选取的PCB电量控制信号,其定义式如下:
(1)

(2)

1.2 外置SRAM
外置SRAM芯片负责存储变磁力吸附爬壁机器人运动过程中的电量传输信号,具有I/O、FSMC、NBL、HMC等多个负载接口组织,可以在核心IS62WV51216主板的作用下,更改电量信号的传输方向,从而使得神经网络主机能够直接控制机器人设备的运动行为与行进方向[7]。IS62WV51216主板存在于外置SRAM芯片中心,可以通过调节控制开关的方式,使I/O、FSMC、NBL、HMC、OE等负载接口呈现出闭合或断开状态——当负载接口断开时,变磁力吸附爬壁机器人所承载的电量信号向外输送;当负载接口闭合时,外部电量信号连续存储进入IS62WV51216主板。I/O接口是外置SRAM芯片单元的核心连通组织,可以对高压端输入的电量信号进行排序处理,而完成排序的电量信号则可以借助该类型连接端口进入传感器模块、驱动I/O口电路等其他下级硬件设备结构之中[8]。具体的外置SRAM芯片连接形式如图1所示。
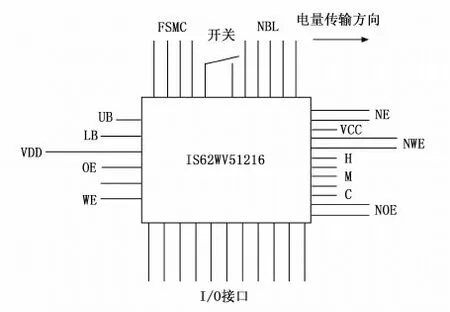
图1 外置SRAM芯片结构示意图
由于外置SRAM芯片只负责传输电力信号,不具备电量存储能力,所以在不违背PCB控制原则的情况下,支持变磁力吸附爬壁机器人运动行为所需的电量信号越多,外置SRAM芯片开放的接口组织也就越多。
1.3 传感器模块
控制系统传感器模块由图像传感器、角度传感器两部分组成,本章节将针对上述两类设备结构应用能力展开研究。
1.3.1 图像传感器
图像传感器负责捕获变磁力吸附爬壁机器人运动图像,能够在分析运动信号阵列、时序电信号阵列组成形式的同时,确定电力驱动行为的作用强度,由于整个传感器单元包含一个独立的电信号选择器和一个独立的控制寄存器,所以在电量接口完全闭合的情况下,CMOS摄像头元件捕获到的图像信息可以借助信息传输信道直接反馈至系统核心控制主机之中[9]。CMOS摄像头元件安装在变磁力吸附爬壁机器人踝关节外侧,能够准确记录机器人运动行为,在机器人运动过程中,时序电信号阵列连续不断记录驱动I/O口电路产生的电量传输信号,运动信号阵列连续不断记录运动行为指令,故而二者均与系统控制主机保持直接连接关系。在电量接口作用下,电力驱动作用直接作用于电信号选择器与控制寄存器,所以无论机器人运动行为是否中断,选择器与控制器元件都保持连续接入状态[10]。图像传感器连接结构如图2所示。
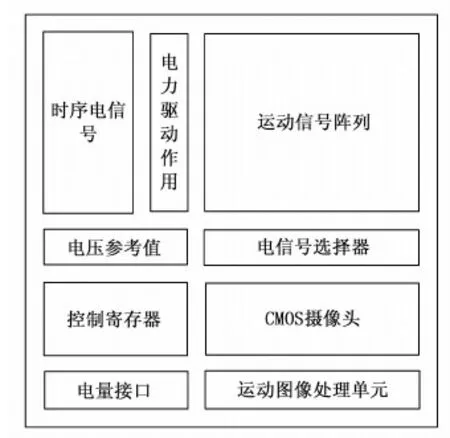
图2 图像传感器连接结构
CMOS摄像头与运动图像处理单元直接的连接关系受到电力驱动作用的影响,所以在变磁力吸附爬壁机器人运动过程中,驱动I/O口电路必须保持连续输入状态。
1.3.2 角度传感器
角度传感器可以在驱动I/O口电路的作用下,根据外置SRAM芯片对于变磁力吸附爬壁机器人所设置的运动需求,来控制机器关节转角的偏转程度,从而实现对机器人运动幅度的有效控制。转向器能够调节机器关节的转动幅度,在驱动I/O口电路保持连续接入状态的情况下,转向器偏转幅度越大,就表示机器人设备的运动频率越快。角度控制器偏转程度决定了机器人关节角的转向水平,由于元件不具备自主运动能力,所以任何细微的元件偏转行为都受到螺旋绳的直接控制[11-12]。在非运动状态下,螺旋绳收紧并完全进入收纳装置内部;而在机器人运动状态下,螺旋绳慢慢放松,部分绳体由收纳装置中突出,此时角度控制器所受牵引力相对较小,故而具备一定的自主转动能力。角度传感器连接结构如图3所示。
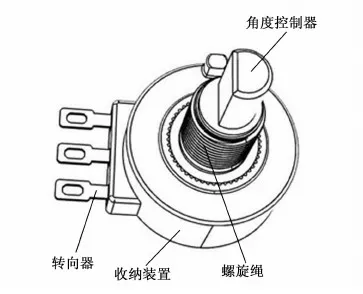
图3 角度传感器连接结构
角度传感器元件的作用能力受到驱动I/O口电路的直接影响,所以在控制变磁力吸附爬壁机器人运动行为时,传感器设备与核心电路结构的连接需要串口通路的配合。
1.4 驱动I/O口电路
驱动I/O口电路是变磁力吸附爬壁机器人控制系统中的核心电量供应装置,以ADO831设备作为核心应用结构,可以联合LM34单片机,控制外置SRAM芯片元件内的电量转存行为,从而使得控制系统内形成一个完整的电量循环回路,确保角度传感器不会出现过度偏转行为[13]。驱动I/O口电路布局形式如图4所示。

图4 驱动I/O口电路图
Micro芯片连接于ADO831设备旁侧,借助CS通路、CLK通路、DO通路接入驱动I/O口电路之中。随着变磁力吸附爬壁机器人运动频率的加快,Micro芯片两端所承担的负载电压水平也会不断增大,在此情况系,ADO831设备向外驱动大量的传输电信号,LM34单片机就可以利用这些电信号参量确定机器人当前所处区域,从而使得图像传感器元件能够对机器人运动图像进行准确捕捉[14]。驱动I/O口电路具有两个正极输入端口(+VCC)和一个负极输出端口(-VDD),前者与Netvlad神经网络体系对接,并可以从中提取大量的电量传输信号;后者则负责调节气动阀门装置,使得其内部暂存电量信号的传输行为始终保持相对稳定的状态。
1.5 气动阀门
变磁力吸附爬壁机器人以气动马达作为动力驱动装置,而气动马达的运行速度却是由外部气压的数值来决定的,当角度传感器转动至一定数值区间之内时,气压大小完全是由阀门开度水平来确定的,故而控制气动阀门开合程度就可以实现对气动马达转速的控制,进而调节变磁力吸附爬壁机器人在建筑结构外表面上的运动速度[15-16]。由于机器人运动过程中,气动阀门进气量并不可能始终保持稳定,所以求解运动学方程式,还要考虑转移向量等其他物理量的取值情况。由于马达转速受到驱动I/O口电路中电量输出行为的直接影响,所以电信号输出量越大,转速向量的取值也就越大。基于此,联立式(2),可将气动阀门开度水平定义式表示为:
(3)
式中,v′表示变磁力吸附爬壁机器人在建筑结构外表面上的实时运动速度,φ表示气体驱动系数,b表示气动阀门开度指标,且b≠0的不等式条件恒成立,m表示气动马达的转速向量,a表示阀门进气系数,s表示阀门出气系数。当机器人运动方向为正时,a>s的不等式条件成立;当机器人运动方向为负时,s>a的不等式条件成立。
2 变磁力吸附爬壁机器人控制系统软件设计
在各级硬件应用结构的支持下,按照Netvlad神经网络构建、程序任务划分、移植参数求解的处理流程,完成对变磁力吸附爬壁机器人控制系统的设计,设计流程如图5所示。
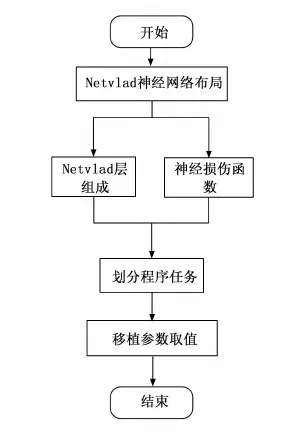
图5 变磁力吸附爬壁机器人控制流程图
由图5可知,通过Netvlad层和神经损伤函数对Netvlad神经网络进行布局后,分级处理控制系统内部的执行程序,选择移植参数值,取值越大,控制指令越明显。至此,完成变磁力吸附爬壁机器人的软件控制系统设计。
2.1 Netvlad神经网络构建
Netvlad神经网络体系可以按照系统控制程序执行原则,判断变磁力吸附爬壁机器人的当前运动状态,但网络体系结构的组成相对较为复杂,故本章节将从Netvlad层单元组成形式、神经损伤函数两个方面着手,分析神经网络体系的布局模式。
2.1.1 Netvlad 层
Netvlad 层组织是Netvlad神经网络体系的核心组成结构,包含分析、过滤、处理三类连接节点,能够根据变磁力吸附爬壁机器人的实时运动状态,调节控制指令传输行为,从而使得系统控制主机中能够生成准确的运动行为记录文本[17]。Netvlad 层组织的过滤节点由初步过滤、深度过滤两部分组成,前者的负载数量相对较多,一般来说,每一个输入的控制程序样本数据都必须对应两个完全独立的初步过滤节点,但为避免控制指令过度传输行为的出现,初步过滤节点、深度过滤节点之间的连接则保持就近对应关系,及深度过滤节点数量远小于初步过滤节点[18]。Netvlad神经网络布局形式如图6所示。
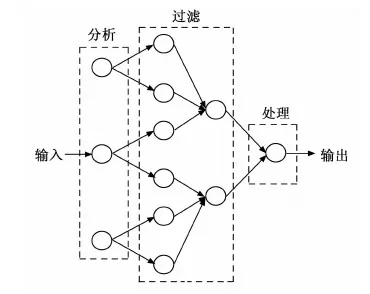
图6 Netvlad神经网络布局
Netvlad 层组织定义标准表示为:
(4)
式中,γ、φ表示两个不相等的控制程序控制系数,gγ表示基于系数γ的指令程序定义特征,gφ表示基于系数φ的指令程序定义特征,f表示Netvlad规划权值。控制程序文本输入量的增大会导致Netvlad神经网络内分析节点存在数量的增大,而过滤节点连接数量是否增大则还需要根据变磁力吸附爬壁机器人的当前运动形态进行具体判断。
2.1.2 神经损伤函数
神经损伤函数决定了Netvlad 层组织对于控制程序指令的负载能力,在既定运动范围内,变磁力吸附爬壁机器人的行进速度越快,神经损伤函数表达式的赋值也就越大[19-20]。联立式(4),推导Netvlad神经损伤函数表达式为:
F=∑ιmax[D×(λ1(g1)·λ2(g2)·λ3(g3))]
(5)
式中,ι表示爬壁机器人运动过程中的变磁力吸附系数,为了满足Netvlad 层组织对于控制指令程序的编码原则,ι系数的最小取值只能等于自然数1,λ1表示分析节点查询系数,g1表示分析节点中的控制指令累积向量,λ2表示过滤节点查询系数,g2表示过滤节点中的控制指令累积向量,λ3表示处理节点查询系数,g3表示处理节点中的控制指令累积向量。由于Netvlad 层组织中分析节点、过滤节点、处理节点的负载个数不相同,所以求解神经损伤函数时,向量g1、g2、g3的取值也不可能相等。
2.2 程序任务划分
(6)
其中:j1、j2、…、jn表示n个不重合的任务指令执行区域,且系数n的取值恒大于自然数3(3个任务指令执行区域分别对应Netvlad神经网络的分析、过滤与处理节点),κmin表示变磁力吸附爬壁机器人区域性运动向量的最小取值,κmax表示区域性运动向量的最大取值。
联立式(5)、式(6),推导控制系统程序任务划分表达式如下:
(7)

2.3 移植参数
移植参数可以理解为系统控制协议在Netvlad神经网络体系内的移动向量,在程序任务区域划分标准保持不变的前提下,移植参数取值越大,Netvlad神经网络体系内控制协议的移动作用指令也就越明显[23-24]。移植参数求解表达式为:
(8)
其中:ϑ表示控制指令移动向量,ϖ表示控制指令定义向量,ΔW表示单位控制周期内的呈现指令作用步长值,ΔQ表示区域转向系数累积量。至此,完成对相关参数指标的计算与处理。
在设计的基于Netvlad神经网络的变磁力吸附爬壁机器人控制系统中,硬件系统和软件系统联系密切,硬件系统中的外置SRAM、传感器模块、驱动I/O口电路、气动阀门等多个硬件结构为软件系统提供了物质条件,而软件设计中的Netvlad神经网络构建、程序任务划分、移植参数求解部分使硬件系统发挥其应有的效果。硬件系统与软件系统相互配合,可有效提高变磁力吸附爬壁机器人的避障能力,实现基于Netvlad神经网络的变磁力吸附爬壁机器人控制系统的顺利应用。
3 实验分析
3.1 实验环境布置
为了验证基于Netvlad神经网络的变磁力吸附爬壁机器人控制系统在大型建筑结构外表面的自主避障能力,选取两个场景进行实验。变磁力吸附爬壁机器人主要用在环境复杂的大型建筑结构外表面巡检任务中,由于建筑结构外表面并不能保持绝对光滑的状态,所以选择光滑壁面、粗糙壁面两种实验场景。实验场景如图7所示。

图7 实验场景
变磁力吸附爬壁机器人结构如图8所示。
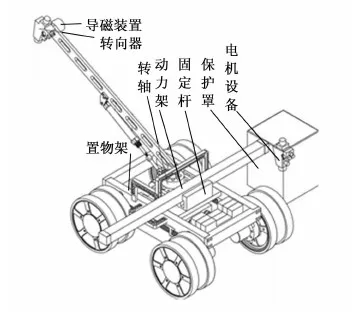
图8 变磁力吸附爬壁机器人结构
在机器人结构中,电机设备提供了爬壁运动过程中的电动力作用,固定杆将搭载电机设备的保护罩连接在动力架侧端,动力架能够维护机器人的运动平衡性,转轴可以在电机设备的驱动作用下不断转动,从而使得机器人运动方向发生改变,置物架为相关动力装置提供支撑作用,转向器负责确定机器人的运动方向,导磁装置提供一定的磁感应作用,以确保机器人不会脱离既定运动区域。
在本次实验过程中,以所设计的基于Netvlad神经网络的变磁力吸附爬壁机器人控制系统作为实验组监测方法,以文献[4]基于多传感器融合的机器人移动控制系统作为对照组监测方法,分别应用上述两类系统监控机器人的运动行为,并借助监测软件确定障碍物所在位置、爬壁机器人所在位置之间的实测距离。
3.2 实验结果
在大型建筑结构外表面存在障碍物的情况下,障碍物所在位置与爬壁机器人所在位置之间的距离,可以反映出机器人设备的避障能力。机器人动力作用距离最大值只能达到30 cm,故而当障碍物所在位置与爬壁机器人所在位置之间的距离小于30 cm时,表示机器人避障能力较强,运动过程中不会出现因不紧密吸附而造成的掉落问题,反之则表示机器人避障能力较弱。
实验组和对照组机器人在不同运动壁面上的避障能力分别如图9和图10所示。
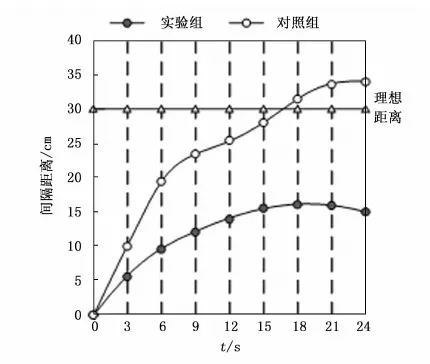
图9 光滑壁面的避障能力
分析图9可知,在光滑运动壁面上,实验组障碍物所在位置与爬壁机器人所在位置之间的距离呈现出先增大,再减小的数值变化状态。当实验时间为18 s时,实验组间隔距离达到最大值16.22 cm,远小于机器人动力作用距离最大值30 cm。而对照组障碍物所在位置与爬壁机器人所在位置之间的距离则始终保持不断增大的数值变化状态。当实验时间处于15~18 s之间时,对照组间隔距离超过机器人动力作用距离最大值30 cm,整个实验过程中,其最大值达到了33.87 cm,远大于实验组数值。由此可知,实验组机器人避障能力较强。

图10 粗糙壁面的避障能力
分析图10可知,在粗糙运动壁面上,实验组障碍物所在位置与爬壁机器人所在位置之间距离均值明显大于光滑壁面上的距离均值。当实验时间处于9~12 s之间时,对照组间隔距离达到最大值25.02 cm,依然小于机器人动力作用距离最大值30 cm。而对照组障碍物所在位置与爬壁机器人所在位置之间的距离保持先增大再稳定,最后继续增大的数值变化状态。在整个实验过程中,其最大距离数值达到了37.51 cm,明显大于机器人动力作用距离最大值30 cm,也远大于实验组数值。由此可知,实验组机器人避障能力较强。
综上可知本次实验结论为:应用所设计的基于Netvlad神经网络的变磁力吸附爬壁机器人控制系统,障碍物所在位置与爬壁机器人所在位置之间的实测距离数值始终小于机器人动力作用距离的最大值,这就表示爬壁机器人在光滑壁面、粗糙壁面上的自主避障能力就能得到保障,对于提升机器人与运动平面之间的吸附紧密性可以起到一定的促进性影响作用。
4 结束语
本文设计了基于Netvlad神经网络的变磁力吸附爬壁机器人控制系统,在Netvlad神经网络的基础上,按照PCB控制标准,设置外置SRAM芯片、传感器模块、驱动I/O口电路等多个硬件应用结构,又通过划分程序任务的方式,求解移植参数指标的取值范围。在实用性方面,这种新型系统能够有效控制障碍物所在位置、爬壁机器人所在位置之间的实测距离数值,可以在实现自主避障的同时,保证机器人与运动平面之间的紧密吸附,符合实际设计需求。
猜你喜欢
力学学报(2022年6期)2022-07-10 13:13:38
中国特种设备安全(2021年12期)2021-04-26 14:37:12
新高考·教师版(2021年1期)2021-03-01 12:21:36
电子制作(2019年13期)2020-01-14 03:15:34
数学大王·低年级(2019年12期)2019-08-14 03:51:29
铁道通信信号(2019年3期)2019-04-25 03:00:42
华东师范大学学报(自然科学版)(2018年2期)2018-05-14 10:27:17
电测与仪表(2017年24期)2017-12-19 05:15:26
广东石油化工学院学报(2016年6期)2016-05-17 05:17:29
应用技术学报(2014年1期)2014-02-28 14:52:15