
非线性互联系统状态观测器设计方法研究
2023-02-03 05:17:18孙延修
自动化仪表 2023年1期
孙延修,黎 虹
(沈阳工学院基础课部,辽宁 抚顺 113122)
0 引言
随着现代工业控制系统复杂程度的不断提升,非线性互联系统可以更好地描述实际生产过程。因此,非线性互联控制系统在电力系统、生产系统、水力供给系统、多智能体系统等各种系统中得到了广泛的应用。为此,针对互联系统的研究引起了人们的广泛关注[1-3]。其中,状态观测器的设计有利于系统的鲁棒控制及故障估计与诊断的实现,在控制理论中具有重要的作用。所以,针对控制系统状态观测器的设计是控制领域的研究热点。目前,针对广义系统及互联系统观测器的研究已经取得了一定的成果[4-8]。
针对非线性互联系统状态观测器的设计方法正逐渐成为重要的研究课题。文献[6]基于互联系统的相似性,针对一类相似广义互联系统进行了研究,给出了互联系统区间观测器的设计方法。所设计的区间观测器对控制系统及扰动性具有相对宽松的条件。文献[7]通过设计干扰观测器,有效降低了滑模抖振,并且带干扰观测器的滑模控制效果优于常规滑模控制。文献[8]针对一类广义系统进行研究,设计了系统的全维以及降维形式的状态观测器,并简化了两个观测器增益矩阵的求解过程。文献[9]针对一类互联系统的故障诊断问题进行了研究,通过所设计的互联系统诊断观测器实现了对各子系统中故障的在线有效估计。文献[10]针对含有不确定项的广义系统提出了新的故障估计观测器的设计方法,并对控制系统发生故障情况下的故障部分进行了仿真,验证了故障估计误差对外部扰动所具有的鲁棒性。
近年来,针对非线性广义互联大系统观测器的研究偏少。本文针对含扰动项与非线性项的一类广义互联系统进行研究,给出了非线性互联系统观测器的设计方法。该方法考虑到系统的外部扰动,设计了状态观测器;以线性矩阵不等式的形式给出了增益矩阵满足的条件,简化了非线性互联系统观测器增益矩阵的求解过程;通过两个仿真算例,检验了观测器设计方法的有效性。
1 问题描述
具有N个含扰动非线性子系统的广义互联系统为:

(1)
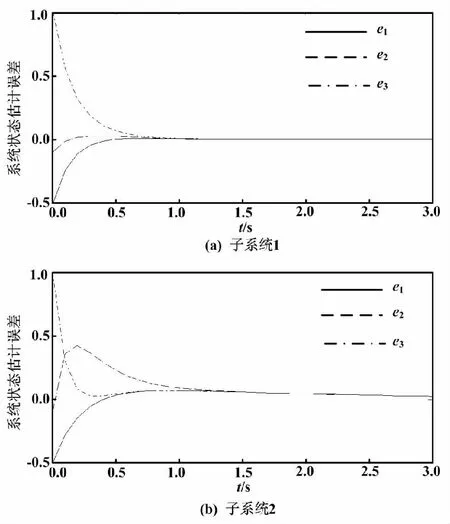
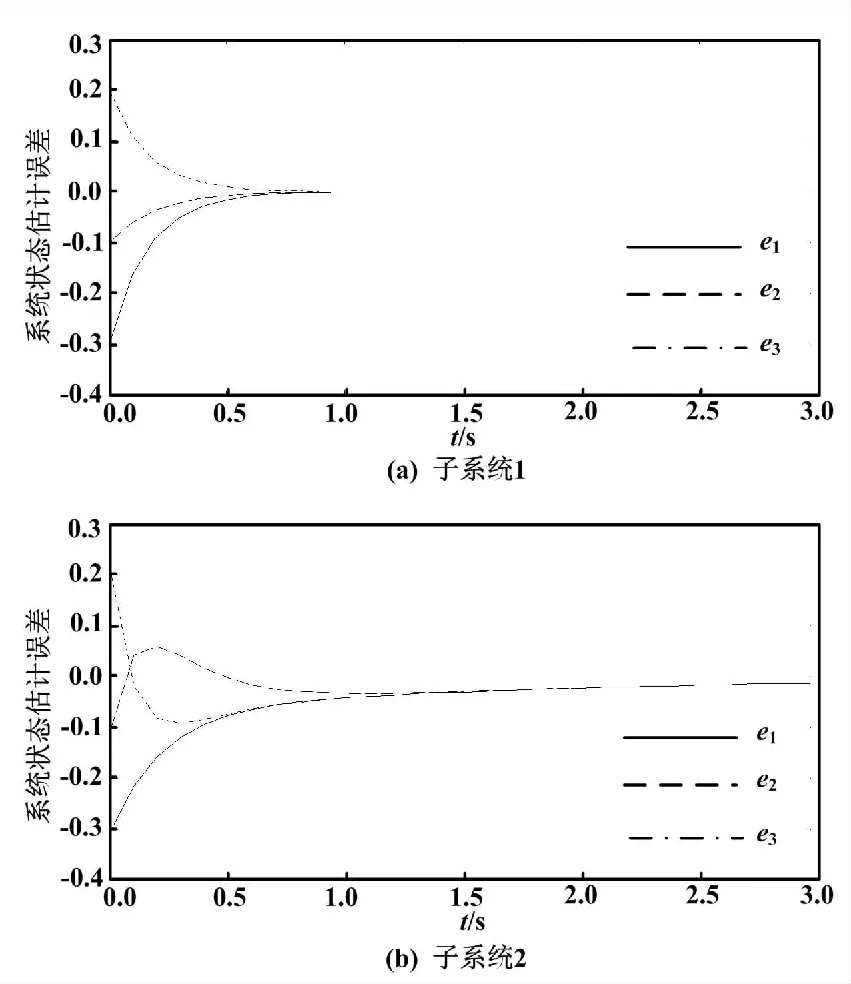
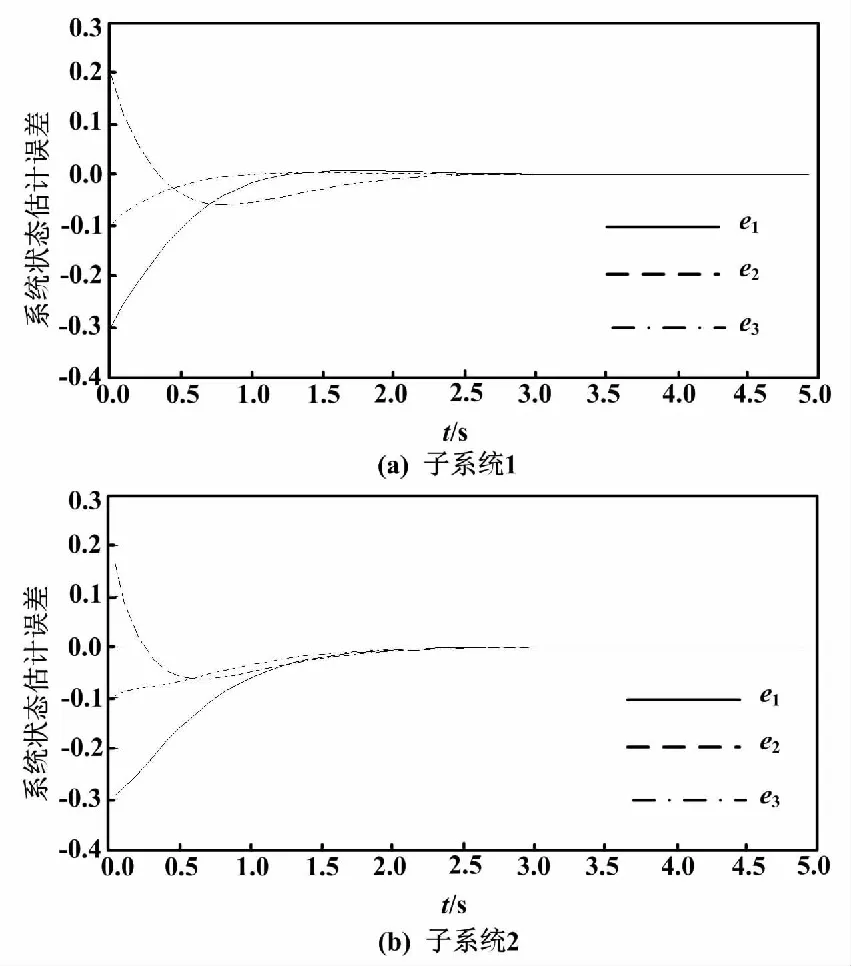
式中:xi(t)为状态向量,xi(t)∈Rn;ui(t)为控制输入,ui(t)∈Rm;yi(t)为被控输出,yi(t)∈Rp;ωi(t)为系统干扰项,ωi(t)∈Rl;Ei、Ai、Bi、Ci、Di分别为具有适当维数的已知矩阵,Ci为列满秩矩阵;rankEi 假设1 非线性项gi[xi(t),t]满足Lipschiz条件: (2) ①M<0。 TiEi+NiCi=In+q (3) 式(1)可转换为: (4) 针对式(2),可设计以下观测器: (5) 式中:Li为第i个子系统的增益矩阵。 根据式(4)和式(5),可以得到第i个子系统的误差动态方程为: (TiAi-LiCi)×ei(t)+Δgi+TiDiωi(t)+ (6) 定理1 若正定矩阵Pi和增益矩阵Li满足以下不等式(7): (7) 则式(5)为互联系统(1)的状态观测器。 (8) 根据Schur补引理1,有式(9),则可推出不等式(7),证毕。 (9) 定理2 若正定矩阵Pi和增益矩阵Li满足不等式(10): (10) 则式(5)为互联系统(1)的状态观测器。 (11) i,j=1,2,...,N。 根据Schur补引理1,有式(12),则可推导出不等式(10),证毕。 (12) 注1 广义互联系统中的互联项是观测器设计的难点。考虑到系统的干扰项,定理2给出了增益矩阵存在的充分条件,以便通过MATLAB软件对增益矩阵进行求解。 定理3 若正定矩阵Pi和增益矩阵Li满足不等式(13): (13) i,j=1,2,…,N。 则式(5)为互联系统(1)在Ei=I情况下的状态观测器。 说明:定理3的证明过程同定理2,证明过程略。 注2 正常互联系统是广义互联系统的特殊形式,在系统状态观测器的设计过程中令奇异矩阵Ei=I。根据定理3可以求出互联系统观测器的增益矩阵,相对于广义形式的控制系统观测器的设计更为简便。 考虑如下含2个广义子系统的非线性互联系统: (14) 说明:式(14)算例针对本文给出的状态观测器设计方法进行验证。该设计方法对控制系统中的扰动项的具体形式没有具体要求,所以上述数值算例并未给出扰动项的参数。 利用MATLAB可以计算出在α=0.7时,观测器的增益矩阵。 ①不含扰动情况下,求解出的观测器增益矩阵为: ②含扰动情况下,求解出的观测器增益矩阵为: 不含扰动项时观测器误差仿真曲线如图1所示。图1中,互联系统(14)的初始估计误差为(-0.5,-0.1,1)。 图1 不含扰动项时观测器误差仿真曲线 含扰动项时观测器误差仿真曲线如图2所示。图2中,互联系统(14)的初始估计误差为(-0.3,-0.1,0.2)。 图2 含扰动项时观测器误差仿真曲线 由图1、图2可知,系统状态估计误差均趋于零,可以实现对非线性广义互联系统(14)中状态向量的鲁棒估计。 参考文献[12],考虑以下含2个子系统的非线性互联系统: (15) 正常互联系统观测器误差仿真曲线如图3所示。图3(a)和图3(b)分别为互联系统(15)在初始估计误差为(-0.3,0.2,-0.1)时,各子系统的观测器状态估计误差曲线。由图3可知,系统状态估计误差均趋于零,观测器状态向量可以实现对互联系统(15)中状态的鲁棒估计。 图3 正常互联系统观测器误差仿真曲线 本文针对同时含外部扰动项与非线性项的一类非线性互联系统进行研究,给出了系统状态观测器的设计方法。增益矩阵以线性矩阵不等式的形式给出,有利于各子系统增益矩阵的求解;同时,李雅普诺夫函数中设计的性能指标可以减少扰动对系统状态估计的影响。通过两个仿真算例,验证了所提出的状态观测器设计方法的有效性。本文观测器的设计方法可以为后续具有不确定性、时滞性的非线性互联系统观测器的设计提供理论支撑。





2 广义互联系统观测器的设计

3 主要结果
3.1 系统不含扰动项时状态观测器的存在条件





3.2 系统含扰动项时状态观测器的存在充分条件







3.3 正常互联系统状态观测器的存在充分条件


4 仿真算例
4.1 广义互联系统仿真算例
4.2 正常非线性互联系统仿真算例

5 结论
猜你喜欢
数学物理学报(2022年3期)2022-05-25 13:33:00
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
电子制作(2019年19期)2019-11-23 08:41:36
中国中医急症(2019年10期)2019-05-21 07:20:28
电子制作(2018年19期)2018-11-14 02:37:02
数学年刊A辑(中文版)(2016年2期)2016-10-30 01:46:38
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年11期)2014-04-04 09:21:36
