
自走式农业机械静态稳定性研究现状及展望
2023-02-01 01:35姜欢龙严重勇李青涛李佳阳谭芸颖
西华大学学报(自然科学版) 2023年1期
姜欢龙,严重勇,李青涛,2*,梁 丽,李佳阳,谭芸颖
(1.西华大学机械工程学院,四川 成都 610039;2.西华大学现代农业装备研究院,四川 成都 610039)
自走式农业机械自发明以来,凭借自身提供动力实现行走并可带动机具作业的优势,使得农业生产中人工劳动量大幅度降低,工作效率得到飞速提升。但是自走式农业机械相比于汽车,重心高、轴距短、轮/轨距窄,作业环境差,静态稳定性差,易在作业时发生失稳,导致作业质量差,甚至造成人员伤亡。现在常采用的主动安全手段是加装预防失稳装置,其结构复杂,技术作用过程中存在动作响应慢、调节精度差等问题;被动安全手段多采用安全框架设计,但它只能在失稳发生后起到保护驾驶员的作用。现有主、被动安全手段均未能从根本上解决失稳这一问题[1]。解决自走式农业机械失稳问题的根本在于直接提升其稳定性,即应对其稳定性进行分析与理论建模,对影响稳定性的重要因素进行研究,并系统地提出提升其稳定性的方法。
自走式农业机械失稳问题多出现于田间或坡地,行走速度较低,因此对静态稳定性进行研究更有针对性。国内外在静态稳定性研究方面较少,可参考的权威性文献量相对较少,其研究发展缓慢,因此,对现有的自走式农业机械静态稳定性研究内容进行总结是必要的。
本文对比了国内外自走式农业机械静态稳定性基础理论研究及标准,介绍了其静态稳定性影响因素的研究现状和已提出的改良方法,指出了研究存在的不足,并对其进行展望,以期为自走式农业机械静态稳定性研究提供参考。
1 静态稳定性的研究现状
国内外研究者均认为自走式农业机械的失稳是以滑移和翻倾形式出现[1−2]。静态稳定性能是指在静态下机械本身所固有的抗拒滑移和翻倾的能力,可分为滑移稳定性和翻倾稳定性。在静态稳定性的研究内容上,国内外主要对其纵向静态稳定性和横向静态稳定性展开研究,采用纵/横向静态滑移角和纵/横向静态翻倾角作为评定指标[3−5]。
1.1 静态滑移稳定性
研究者在对自走式农业机械的纵/横向滑移进行分析后,发现履带式和全轮均有制动装置的轮式自走式农业机械的纵向静态滑移角仅与地面附着系数相关,地面附着系数越大,静态滑移角越大。但由于横坡的地面附着系数小于纵坡的地面附着系数,因此横坡滑移问题相对纵坡滑移问题更为严峻[6−8]。对于仅驱动轮有制动装置的轮式自走式农业机械而言,其纵向静态滑移角还与重心高度、轴距相关[9],但很少有研究者深入探索重心高度、轴距和地面附着系数对其纵向静态滑移角的影响。
1.2 静态翻倾稳定性
研究者对纵向翻倾采用力矩分析法进行分析后,发现履带式和轮式自走式农业机械静态翻倾角与轴距和重心位置相关,且均独立影响纵向静态翻倾角:轴距越大、重心越低,纵向静态翻倾角度越大。当重心纵向位置在轴距中间时,其爬/下坡的纵向抗翻倾性能最优。为避免自走式农业机械发生纵向翻倾,设计人员通常会在整机前端加配重,使重心尽可能在纵向中间位置,以达到前后轴载荷各占一半的目的。Kumar 等[10]认为拖拉机前轮传递到路面上的负载不应小于拖拉机总质量的20%,并通过监控前后车轿载荷进行预警;张昊等[11]对果园作业平台确定机械翻倾临界点,通过对稳定系数K值的判定来实现机械的翻倾预警。
有研究者对横向翻倾现象采用相同方法分析,发现其横向静态翻倾角与轮/轨距、履带或轮胎接地宽度和重心位置相关,且均独立影响横向静态翻倾角:轮/轨距、履带或轮胎接地宽度越大,重心越低,横向翻倾角度越大。当重心横向偏移量为零时,其左右两侧抗翻倾性能最优。横向翻倾问题相对纵向翻倾问题更为严峻,因此,国内外研究者针对横向翻倾预警做了大量工作。国外通常以横向载荷转移率作为判断发生横向翻倾的依据,再结合控制计算,判断机体是否会发生失稳,设计翻倾预警,并对其进行仿真和试验验证[12−13]。国内研究者提出采用传感器监测姿态进行预警,如:彭朝晖等[14]针对高地隙田园管理机,基于横向载荷转移率建立模型,并采用仿真和试验证明了预警系统的实时性与准确性;贾拓等 [15]根据铰接式装载机作业状态计算出稳定区域,采用陀螺仪测量其倾斜角度,与稳定区域中的稳定状态点对比进行预警判断,并用实验证明了该方案的可行性。
1.3 国内外静态稳定性标准对比与使用建议
1.3.1 国内外权威标准对比
国内外研究者均认为滑移没有翻倾危险[2−3],因此,自走式农业机械的设计应当满足静态滑移角度小于静态翻倾角度,使其在陡坡行驶时先发生滑移提醒驾驶员,避免翻倾的发生。当地面对一侧行走装置的作用力变为零时,自走式农业机械将会发生翻倾,此时它的重心在稳定面上的投影位于稳定面的边缘线。为确定自走式农业机械的静态翻倾角度,国内外制定了不同的计算或试验标准。对比国内标准GB/T 3871.21—2015《农业拖拉机试验规程 第21 部分:稳定性》[4]和国外标准ISO/DIS 16231-2:Self-propelled agricultural machineryassessment of stability-part 2:Determination of static stability and test procedures[5]可以看出国内外标准在确定静态翻倾稳定性方法的相同点与不同点,如表1 所示。
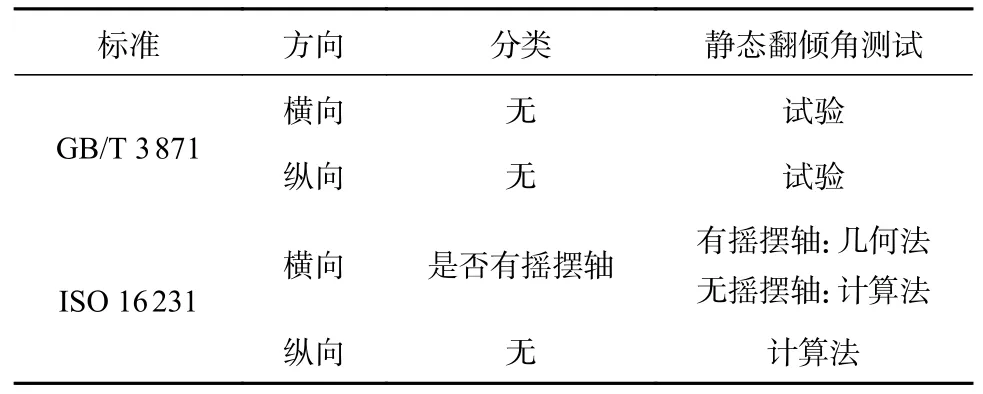
表1 静态翻倾稳定性测定方法对比Tab.1 Comparison of static roll stability determination methods
分析表1 可知,国内是采用试验测得静态翻倾角度,而国外采用计算法和几何法得到静态翻倾角度。学者和企业在对某一特定机型进行分析时的理论基础和方法是相同的:通过理论计算或模型仿真,得到模糊的静态翻倾角度,随后进行试验验证,分析误差大小。
此外,国外研究者认为带有摇摆轴的轮式自走式农业机械的横向翻倾过程与其他类型的横向翻倾过程不同,如图1 所示,对此采用空间投影法判断重心的水平投影是否在翻倾稳定面内,如图2 所示,最后通过求解得到有摇摆轴的轮式自走式农业机械的横向静态翻倾角度。
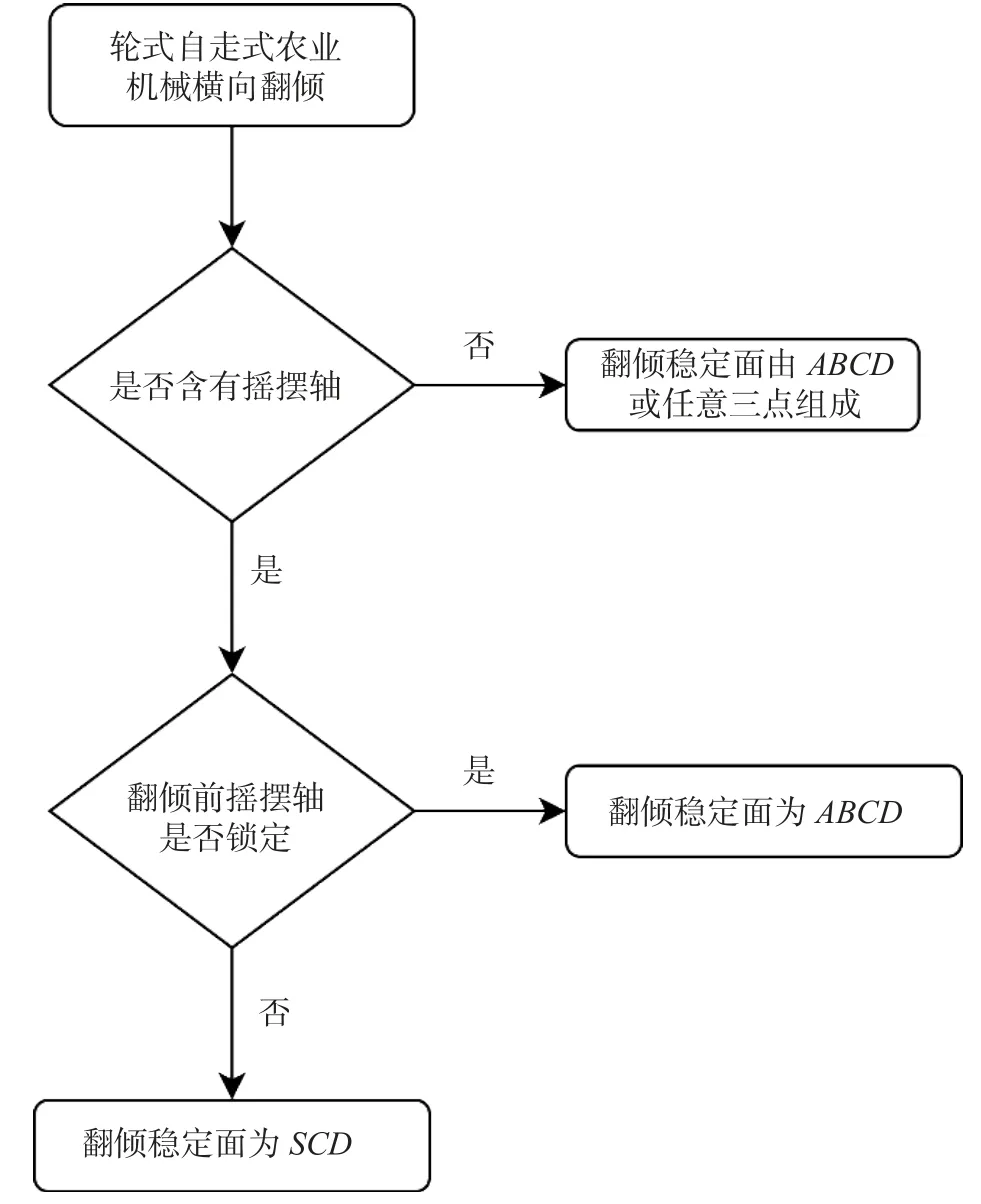
图1 国外轮式自走式农业机械横向翻倾稳定面确定过程Fig.1 Stability surface determination process of foreign wheeled self-propelled agricultural machinery
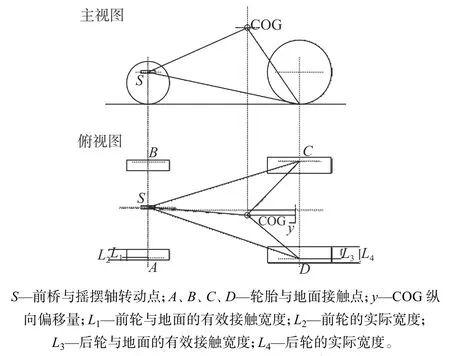
图2 轮式自走式农业机械横向翻倾稳定面Fig.2 Wheel self-walking agricultural machinery transverse roll stability surface
国标GB/T 3871.21—2015 规定了静态翻倾角度的测试方法,适用于测量国内大部分自走式农业机械的静态翻倾角度,但其侧重试验过程,理论部分介绍较少。ISO 16231-2 侧重理论求解静态翻倾角度,针对轮式自走式农业机械的静态翻倾过程更加细致深入,但没有对试验验证部分进行规范。有研究者引用ISO 16231-2 进行理论计算后对其静态翻倾角度进行试验验证,例如:Hong 等[16]对3轴非对称设计的拖拉机进行了测试;Chowdhury 等[17]对萝卜收割机横向静态翻倾角度进行测定,建立了数学仿真公式进行计算,开展了横向翻倾试验,并与仿真结果进行误差分析,判断是否满足ISO 16231-2 的误差要求。
1.3.2 轮式自走式农业机械安全使用建议
通过分析ISO 16231-2 标准发现,自走式农业机械在坡地作业时车身处于以下状况时最易发生失稳。
1)针对履带式和无摇摆轴的轮式自走式农业机械,稳定面是履带/轮胎与地面接触的矩形稳定面。若轴距大于轮/轨距,重心在垂直于单侧稳定边界线所在的平面进行转动时失稳最容易发生,即由于轴距大于轮/轨距,整机的横向翻转范围小于纵向翻转范围,此时整机处于横坡位置;同理,若轮/轨距大于轴距,车身处于纵坡位置时最易发生失稳。
2)针对有摇摆轴的轮式自走式农业机械,在摇摆轴的转动自由度被锁定前,当其重心在垂直于单侧稳定边界线所在的平面上进行转动时最容易发生失稳,即图2 中线SD/SC与等高线平行时[5];在摇摆轴的转动自由度被锁定后与上述履带式相同。
2 自走式农业机械静态稳定性影响因素的研究现状
2.1 地面附着系数对静态滑移角的影响
地面附着系数是受多种因素共同作用所形成的结果。常见的地面类型附着系数如表2、表3所示。
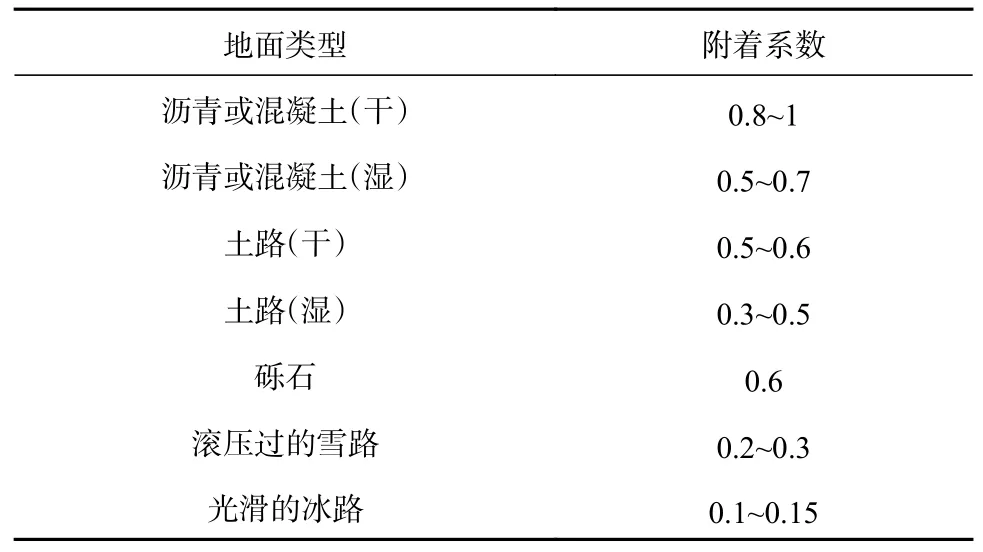
表2 轮式自走式农业机械与地面附着系数[3]Tab.2 The ground attachment coefficient of wheel selfpropelled agricultural machinery[3]
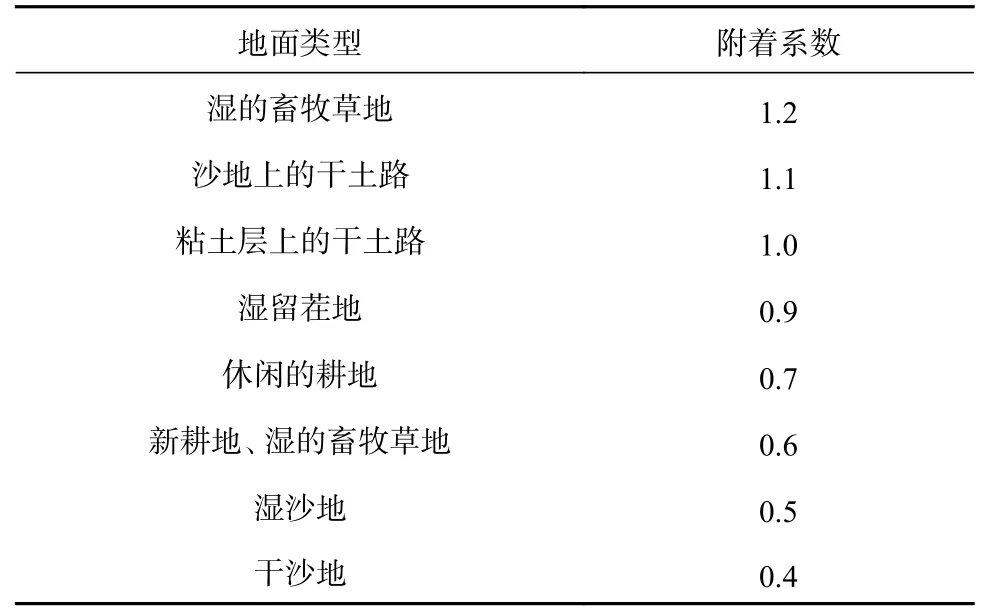
表3 履带式自走式农业机械与地面附着系数[18]Tab.3 Attach coefficient of crawler type self-propelled agricultural machinery and ground[18]
孔江生等[19]对车轮受力分析发现,轮式机械的地面附着性能主要与轮胎宽度、大小,接地比压,地面类型和轮胎花纹特征等因素相关;张季琴等[20]通过正交试验研究发现,履带式机械的地面附着性能主要与履刺宽窄有关,履带支承段长度和履带宽度次之;余玉春等[21]通过轮胎附着力试验发现,增大轮胎接地面积有利于干地附着力的提升,但会导致湿地附着力的下降,而轮胎附着面积与轮胎宽度、大小相关;张新局等[22]通过仿真和试验发现,履带拖拉机旋耕机组在黏土、砂壤土、干沙土的最大爬坡角度分别为 31、23 和 18°,证明了自走式农业机械在不同类型的作业坡地的附着能力不同。
在研制自走式农业机械时,应根据作业环境,合理选择行走装置类型及尺寸,有利于其静态滑移稳定性能增强。
2.2 重心高度对静态翻倾稳定性的影响
重心的高度发生微小变化将对静态翻倾稳定性产生很大的影响。自走式农业机械具有重心高的特点,因此重心的准确测定对分析静态稳定性非常重要。我国常用的自走式农业机械重心测定标准是GB/T 3871.15—2006《农业拖拉机试验规程第15 部分 质心》[23]。仿真分析和试验是测量重心高度的常用方法。仿真分析具有方便快捷的优势,但是由于实际制造与模型存在误差,其外形也不规则;因此,仿真测得的重心高度与实际有一定误差。试验法相对仿真法可以更精准测得重心高度,但由于弹性元件的作用和内部液体运动造成的重心高度变化,机械在不同翻倾角度的重心高度均有误差。
为探究油液的运动对重心高度测量的影响,Wang 等[24]采取试验法以零转弯半径割草机为对象展开研究,分析零转弯半径割草机在油箱储油量为1/3、1 和整个系统几乎干燥的情况下,后桥被抬起角度与重心位置的变化关系,结果显示割草机的提升角从12°增加到15°时,重心高度相对恒定,并采用数据应用误差传递理论分析证实了测量结果的有效性,误差满足ISO 16231-2 标准的规定;Farzaneh 等[25]在Wang 等[24]的研究基础上通过仿真和试验验证了液体容器的位置不会改变液体移动对重心高度测量的影响,且当油箱具有最佳的液量和自由空间组合(即油箱的一半)时对拖拉机的影响为0.41%,满油箱时为1.3%。
Reński[2]研究发现,重心位置越高,自走式农业机械翻倾的可能性越大,且翻倾过程中的加速度越大。Paul 等[26]对全地形车辆、轮式越野车辆、草坪拖拉机、零转弯半径割草机等4 组共17 台机械在满载和空载的状况下进行横向和纵向翻倾极限角度试验,发现空载机械的最大横/纵向翻倾角度相对于满载时最大降低了14°,试验结果表明重心高度越高越容易发生翻倾失稳。毛智琳等[27]对全架式履带拖拉机进行合理布局设计,使重心位置处于整机稳定性能较优的位置,横向翻倾角度达到51.35°。武涛等[28]针对现有的甘蔗田间运输车卸料时重心偏高造成的翻倾问题,设计一款折叠式输送卸料装置,使其在卸蔗时重心高度降低,以提高整车稳定性。
目前,国内外研究者针对部分自走式农业机械进行改进,降低整机重心高度,这已成为增强其稳定性能的主要措施之一。
2.3 轮/轨距、轴距对静态翻倾稳定性的影响
增加轮/轨距可增强横向翻倾稳定性的原理和增大轴距可增强纵向翻倾稳定性的原理是相同的,两者都是增大翻倾半径,使翻倾发生变得更加困难。对于前轮距小于后轮距的拖拉机,张硕等[29]采取田口实验设计方法,改变前后轮轮胎类型、前配重质量、前后轮距和机具位置,在E 级和F 级随机路面行驶进行实验,结果表明,对拖拉机斜坡上侧前、后轮的侧向稳定性影响最大的分别是前配重质量和后轮距。李忠政等[30]探究了轮距和轴距对拖拉机的影响,其模拟实验结果表明:增加轮距对拖拉机横向稳定性有显著提升,但对纵向静态稳定性能的影响范围影响较小;增加轴距对拖拉机的纵向静态稳定性显著提升,但与此同时,轴距过长反而会使纵向静态稳定性能降低,轴距变化对横向静稳定性影响则很小。
较小的轮/轨距和轴距,可减小整车尺寸便于田间灵活作业;较大的轮/轨距和轴距便于增强静态稳定性能:因此,自走式农业机械的开发应具有针对性,根据作业环境和作业对象选择合适的轮/轨距,对于复杂作业环境和多类型作业对象,应结合底盘可变技术进行优化设计。
2.4 轮胎/履带接地宽度对横向静态翻倾稳定性影响
轮胎和履带是自走式农业机械在横向翻倾的支撑点,横向翻倾与轮胎/履带接地宽度相关。Paul等[26]对同一自走式农业机械在相同载荷下,采取不同宽度的轮胎进行横向和纵向的横向翻倾极限角计算,分析得出:宽轮胎的横向翻倾角度比窄轮胎横向翻倾角度要大,但对于纵向翻倾角度几乎无差别。研究者认识到轮胎/履带接地宽度对自走式农业机械横向静态翻倾稳定性的影响,对丘陵山地机械多采用增大支撑点宽度来提升其稳定性能,例如:瑞士Aebi Schmidt 公司的TT 系列坡地拖拉机安装了单轮毂装配双轮胎,如图3 所示;德国公司生产的 Brielmaier 割草机采用宽的滚筒作为行走装置,增强了其横向静态稳定性能,如图4 所示;我国广西惠来宝机械制造有限公司设计生产的适用于山地的惠利山牛系列轮式拖拉机均采用宽轮胎作为行走装置,增大与地面接触宽度,如图5 所示。

图3 瑞士Aebi 公司单轮毂装配双轮胎Fig.3 Swiss Aebi company single hub assembly with twin tires

图4 德国Brielmaier 割草机Fig.4 Germany Brielmaier lawn mower

图5 惠利山牛系列轮式拖拉机Fig.5 Huili Mountain cattle series wheeled tractor
实践证明,对于丘陵山区等复杂地形,可采用宽轮胎/履带增强机械静态稳定性能,同时可降低接地比压,减少对土壤的压实度。因此设计人员在对坡地作业农业机械选用行走装置时,无特殊设计要求的情况下,应有“选宽不选窄”的规范。
3 改良自走式农业机械静态稳定性的技术
现有提升自走式农业机械的静态稳定性能的方法主要有底盘调平技术、可变底盘技术、动量飞轮技术。
3.1 底盘调平技术
常见的自走式农业机械的姿态不变,其重心位置固定,在不同作业环境下合理调整车身姿态,使重心位置变化,可以提高其静态稳定性。以欧美为代表的国家在20 世纪七八十年代开始对自走式农业机械在坡地作业进行车架调平研究[31]。我国对调平技术的研究起步较晚,自本世纪初展开后,出现了以杨福增团队研究的具有代表的履带式差高调平技术[32],同时三点调平、四点调平和多点调平技术也得到快速发展[32−36]。
我国在应用于自走式农业机械的调平技术中,以车桥是否调平为判断依据可大致分为2 类:车桥随车身完成调平和车桥以上部位完成调平。理论上,前者在调平前后车身的横坡站姿由垂直坡面变为垂直水平面,后者在此过程中车桥姿态不变,车架姿态变为水平。在确定姿态调平的变化过程后,国内研究者开展了大量研究。Wang 等[32]针对履带底盘开发了带有电控液压控制的调平装置,车桥与车架姿态同步调整,整车更适宜坡地作业;庄家鹏[37]针对轮式底盘开发了车桥姿态可调的结构,并对其进行仿真和试验验证,得到了纵向和横向静态翻倾角均增大了10°的结论。于泳超等[38]针对果园作业平台设计开发了车桥姿态不变、车架姿态随坡地变化调平的机构,其在不同干扰下始终保持水平,具有较好的抗翻倾能力。
实践证明,调平技术可以有效提升自走式农业机械的稳定性能。调平是研究者研究较多的一种技术手段。
3.2 可变底盘技术
可变底盘技术通过增大两侧行走装置的距离和离地间隙高度,使机械静态稳定性能得到提升。同时,可变底盘技术使机械对作业环境的适应性也得到很大的提升。但是可变底盘技术有结构复杂,部分轮/轨距调整过程费力、繁琐等不足,因此,在应用可变底盘技术时,应注重简化结构、注重结合自动化技术[39]。
3.3 动量飞轮技术
动量飞轮技术是一种主动预防横向翻倾的技术,车头部的飞轮工作对车身整体产生反横向翻倾力矩,使其保持稳定,达到主动防横向翻倾效果[1,40]。由于此项技术方案比较新颖,国内研究者较少,因此,该技术相对其他方法并不成熟,暂未投入到实际应用中。
增强自走式农业机械静态稳定性能的不同方法采用的关键技术及所实现的功能如表4 所示。国内对提升机体静态稳定性能的研制仍处于创新探索阶段,其中:调平技术研究较多,相对另2 种较为成熟,能够达到我国规定的15°坡地调平;可变底盘技术发展较为缓慢,普遍采用机械和液压结合方式,功率消耗较大;动量飞轮方法较为创新,但仍需深入研究。
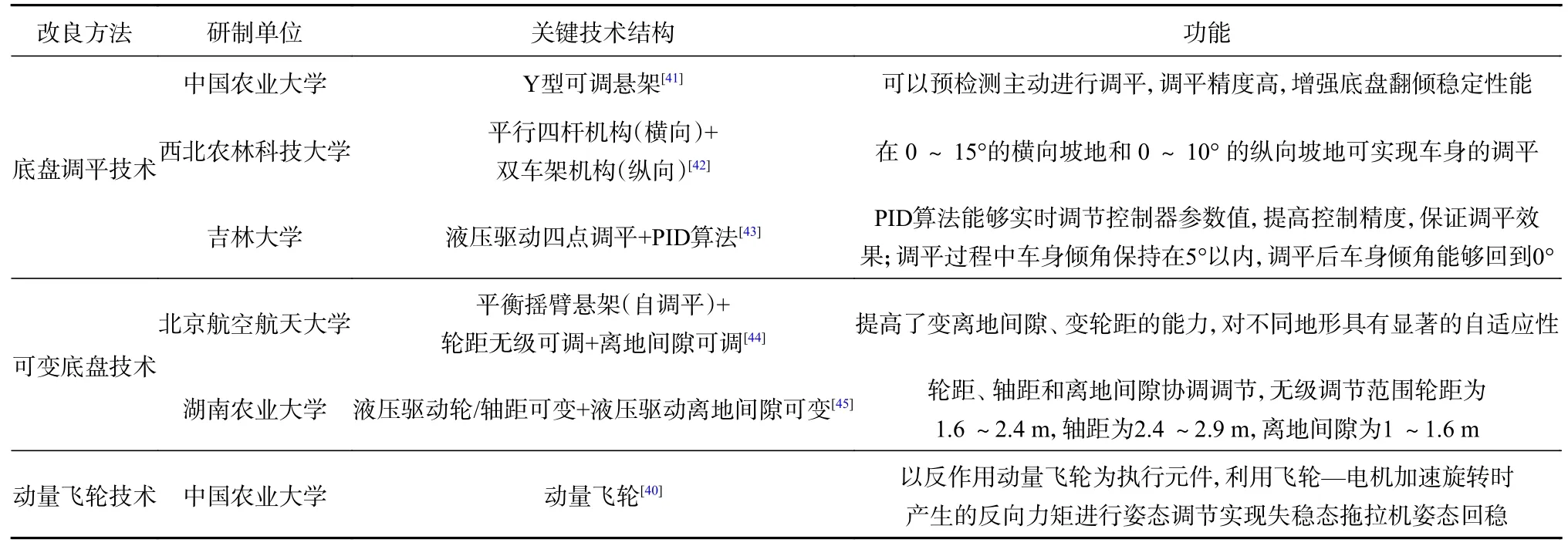
表4 提高农业机械静态稳定性能方法的功能对比Tab.4 Functional comparison of improving the static stability methods of agricultural machinery
4 研究存在的问题
4.1 基础理论研究不足
我国自走式农业机械的后轮多是驱动轮,前轮是转向轮。仅驱动轮有制动装置的轮式自走式农业机械的滑移角就受多个设计参数的影响,其中附着系数、重心位置高度和轴距是关键影响因素,但目前仍未有深入研究。针对不同机械类型,如何进行目标优化设计整机的重心高度和轴距使得综合静态稳定性能最优有待深入研究。
4.2 胎面有效接地宽度误差大
国内丘陵山地的自走式农业机械行走装置逐步倾向于选配较宽的轮胎。在标准胎压下,不同轮胎的胎面有效接地宽度是小于实际胎宽的。轮胎接地宽度误差是造成横向静态翻倾角仿真分析与试验误差的主要影响之一。准确计算轮胎胎面的实际接地宽度可以提升理论分析的准确性。针对不同类型轮胎在不同胎压下的胎面有效接地宽度规律值得深入探索。
4.3 弹性元件对静态稳定性试验造成的误差大
农业机械在不断发展过程中,设计者越来越注重车辆平顺性,通常采用悬架等弹性元件减缓外界输入的振动和冲击,但是弹性元件是造成仿真与试验测试静态翻倾角度的重要误差源之一。分析弹性元件对测试静态翻倾角度影响情况可以降低计算、仿真误差,确定其真实静态翻倾角度。
4.4 底盘坡地实际站姿缺少研究
自走式农业机械在地面的横坡站姿与水平面实际夹角不等于坡度值,但在现有研究中自走式农业机械的横坡站姿均为绝对垂直于坡面或绝对垂直于水平面。实际横坡站姿与多方面因素相关,接地比压、土壤湿度、土壤硬度等因素均有影响,其实际站姿状况与地面因素的影响关系有待深入探究。
5 展望
5.1 拓展三维空间分析
现有的自走式农业机械静态稳定性研究多是绝对的横坡或纵坡,但自走式农业机械最易失稳并不在横坡和纵坡;因此,应根据不同的类型进行静态稳定性分析确定最易失稳的状况,并进行验证,其过程相对繁琐复杂。基于现有的二维研究平面,研发在三维空间的测量方法,将能更加精准快速确定并显示在不同角度下的车身状态,也可以给翻倾预警的研究提供参考。
5.2 加强智能化技术应用
国内研究人员借鉴汽车横向翻倾的研究经验,创新性提出了适用于自走式农用机械的横向翻倾预警技术,但主动增强静态稳定性能的技术发展尚不成熟,其智能化程度不高。结合控制算法、高精度传感器、远程遥控和无人驾驶技术等,可有效提高对现有主被动防失稳的响应速度、效率和可靠性。
5.3 优化底盘开发
在增强自走式农业机械静态稳定性方法中,应加大底盘的研发力度,对底盘进行合理布局,优化底盘设计参数。可变底盘技术应向自动化、轻量化和结构简便化发展。尤其对于我国小地块的丘陵山地的小型自走式农业机械,应结合遥控驾驶等现代化科学技术,避免出现失稳对人员造成危害。
6 结束语
在我国“十四五”加强丘陵山区农业机械发展的背景下,如何提高农业机械静态稳定性是关键问题,对实现农业现代化具有重要意义。针对现有研究的不足,一方面应结合实践作业,完善理论研究内容;另一方面对机械的稳定性创新多角度的分析方法,以降低计算误差。针对提升底盘静态稳定性设计开发,提出以传统底盘设计为基础,引导自走式农业机械研发向智能化、轻量化发展的建议。
猜你喜欢
车迷(2022年3期)2022-08-01
军民两用技术与产品(2021年10期)2021-03-16
中学生数理化·中考版(2020年10期)2020-11-27
机械工程与自动化(2020年4期)2020-08-25
北京汽车(2020年6期)2020-01-03
制造技术与机床(2018年8期)2018-10-09
森林工程(2018年4期)2018-08-04
中国军转民(2018年1期)2018-06-08
航天工业管理(2017年4期)2017-05-12
光学精密工程(2016年4期)2016-11-07
