自行走上轴车的研制及应用效果
2023-01-31 05:40:08祁玉斌董加勇孙连雨
棉纺织技术 2023年1期
祁玉斌 董加勇 孙连雨
(山东日发纺织机械有限公司,山东聊城,252000)
作为传统劳动密集型的纺织行业,对可以明显减少用工的智能生产模式有着更迫切的需求[1]。随着国内工业化程度的不断提高,土地和人工成本在企业运营中占比越来越高[2]。为降低土地和人工成本的占比,大部分纺织企业在布置车间时选择更合理的布局和更小的织机间隔距离,以减少占地和挡车工走动距离。紧凑的织造车间布局对于空调系统的节能设计也是有益的[3]。采用智能上轴机器人系统[4]等可提高车间使用率和工人工作效率,降低工人劳动强度。但织机间距过小造成现有的织轴上轴设备无法进入。经轴上机只能全人工操作,小幅宽的织机人工操作勉强还可以,而大幅宽的织机人工操作就相当费力,操作过程中还很容易造成操作人员受伤。为解决这一问题,开发了自行走上轴车,经轴运输过程中只需要1名操作人员即可轻松操作,上轴时由两人配合完成。织机间通道只需要比经轴边盘直径大20 cm即可。车间主通道大于经轴总长度即可实现转弯进入织机间通道。
1 自行走上轴车结构及原理
自行走上轴车根据织机经轴上轴位置尺寸配合设计,可将经轴直接送入织机经轴架。经轴举升装置可实现将经轴从地面上升起并运输至指定位置;纺织器材升降系统可实现满载的综框(综条)、停经条的吊运并随车运输。为节省空间,以上两部分机构均使用液压及轮轴结构,操作人员可轻松手动操作;驱动机构采用电动驱动,手持操作器操作。因车体较长,驱动机构分为前后两个驱动机构,由控制系统协调运行,可平稳、准确驱动满载整车进行移动,实现各个方向的移动和灵活的转向。我们设计和研发的自行走上轴车如图1所示。

图1 自行走上轴车
1.1 车架
车架采用矩形方管,通过X形和三角形组合焊接而成,整体稳定可靠。车架前后两侧留有安装驱动轮组的空间,驱动轮上方安装经轴提升液压单元和纺织器材提升驱动装置,中间为运输织轴留出充足空间。经轴上方空间用于放置综框(综条)和停经条,在行走时将其吊在提升装置并固定在经轴上。
1.2 运输行走系统
运输行走系统主要由万向轮、驱动轮机构、铅酸电池组和控制操作系统等构成。经轴质量一般都在1 t以上,大幅宽、大边盘直径有接近2 t的。为了保证上轴的适应范围,采用承重型万向轮,并将其分布在车身四角,保证车体可平稳行走。
为保证上轴车可以在狭小空间内平衡行走和正确转身,驱动轮采用全伺服驱动,绝对值编码器检测转身角度。前后两个驱动装置分别由伺服电机和绝对值编码组成单独的PID控制系统,高精度、高响应地跟随手柄方向指令。确保行走方向准确、反应灵敏。前后两个驱动机构可由控制系统控制实现前转向、后转向、分别操作转向、同步转向、同步反向转向、同步横移和分别横移操作。
手持操作器由功能选择旋钮、电源开关、急停按钮和两个操作杆组成。单动/联动旋钮可选择两个驱动装置是否同步转向,同步/反向旋钮可选择两个驱动装置是否向相反方向转向;顺行/横移旋钮可选择车体主运行方向是沿车长度方向还是宽度方向;高/低速旋钮可实现最高运行速度的切换,以适应狭小空间的精确移动和空旷空间的长距离行走。电源开关可控制驱动机构的电源,不使用时可关闭电源节省电池电量。急停按钮可控制车体原地停止,禁用除电源开关外的所有操作。两个操作杆可根据旋钮所选择的功能控制车体的行进方向和速度。
铅酸电池组有全离线和半离线两种充电方式,以保证操作安全和控制系统电气安全。半离线充电时将充电控制旋钮旋至充电位置,接触器断开供电回路,接通充电回路。全离线充电方式是将电池组从车上取下运至专用充电位置进行充电。此时可换备用电源组继续进行工作。充电器采用智能充电器,充满后可自动断电并有灯光指示。
1.3 纺织器材升降系统
用于升降综框(综条)和停经条的纺织器材升降系统采用轮轴绞盘装置驱动链条提升升降杆,升降杆上装有“之”字伸缩臂用于挂载综框(综条)和停经条。“之”字臂可以通过改变角度将其上所挂载的综框(综条)和停经条转移至织机上方,以完成上机动作。轮轴绞盘装置以较小的力量完成大扭矩输出。链轮链条结构将轮轴绞盘的旋转动作转换为直线运行。链条拉动升降臂完成升降动作,利用轮轴绞盘的自锁功能维持升降装置在某一位置的静止。
1.4 经轴举升系统
经轴举升系统采用手动液压泵驱动,通过摆臂的摆动实现经轴的举升和向车中心的移动。液压泵上的切换阀可实现手动操作油泵时油缸伸出与缩回的切换。摆臂的宽度可伸入经轴的轴颈与驱动齿轮之间,确保举起经轴后经轴位置固定。摆臂以车体长度方向调整位置,适应不同幅宽织机的经轴。调整采用顶丝固定,键轴结合定位。可单人方便调整位置,调整完成后锁定可靠。
1.5 控制系统
控制系统采用西门子S7-200smartPLC,通过RS485通讯采集操作器的指令和编码器的检测值,运算后控制4台电机的运动实现整车运动。驱动轮采用两台电机驱动两个轮子,如图2所示,在两个轮子中间是一个转向轴。通过控制两个轮子的速度差控制驱动轮的方向,实现转向。驱动轮转向的角度通过安装在转向轴上的编码器进行检测。控制系统根据手持操作器发来的转向指令和编码器检测到的转向轴位置,控制两台电机的速度差,实现转向控制。
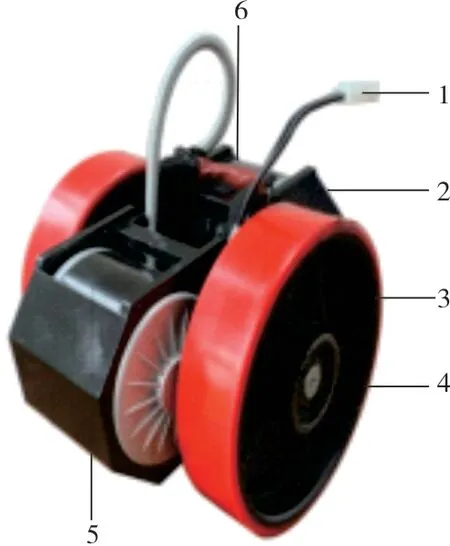
图2 驱动轮
手持操作器采用市场有售的成品外壳,安装标准的控制按钮,给控制系统发送方向、速度和运行模式指令,控制车体前进、后退、运行速度等。运行模式分为前轮转向、后轮转向、平移、平移前轮单动、平移后轮单动。具体如图3所示。

图3 手持操作器
2 自行走上轴车的工作流程
自行走上轴车工作时由人工手持操作器控制行进至经轴存放位置,调整车体位置使经轴举升臂对准经轴。操作液压泵,使用举升臂将经轴举起并移动到车体中间。操作纺织器材升降系统将穿好纱线综丝的综框(综条)和穿好停经片的停经条采用工装吊起。待经轴上车后再将综框(综条)和停经条与经轴固定在一起,以保证运输安全。利用手持操作器将带有经轴的车体行进至目标织机上轴位置。到达织机上轴位置后通过功能旋钮和摇杆操作车体使经轴准确到达经轴架上轴位置。解开综框(综条)和停经条与经轴之间的固定连接,使用纺织器材升降系统将综框(综条)和停经条升至可进入织机的高度。推动“之”字臂将综框(综条)和停经条移动到织机上的指定位置,降下纺织器材升降装置将综框(综条)和停经条放入指定位置。放下综框(综条)和停经条后将“之”字臂收回,将经轴放在织机经轴架上。上轴车开出织机腾出操作空间,以便进行之后的综框(综条)和停经条安装工作。
3 自行走上轴车实际应用效果
自行走上轴车研发成功后投入了实际使用,使用过程中整机运转稳定可靠,自行走上轴车行走装置操作灵敏可靠,定位准确迅速,挂载经轴、综框(综条)和停经条稳定可靠。纺织器材升降系统操作灵活、轻松。整体上轴动作可操作性强,操作安全方便,大大降低了上轴的劳动强度,提高了操作安全性。实际运行效果表明,自行走上轴车完全实现了预期功能。
自行走上轴车的行走区域主要在织机车间内部,环境相对单一,无溅水、雨淋等情况。为节省空间,取消了大部分非必要钣金罩壳。没有钣金罩壳使车体整体美观性有所降低,但这也大大降低了制造成本,贴近用户的需求,减小了维护保养的难度。
4 结语
目前织造行业中,纺织前道的穿经工序完成穿纱的织轴,综丝、停经片以及钢筘在运输以及上机操作均要依靠人工进行,不利于工作效率的提升。我们公司研发的自行走上轴车可在织机高密度布置的车间完成织轴的装卸及运输。该上轴车结构紧凑,节省了操作空间,整体上轴动作可操作性强,操作安全方便省力,降低了上轴工的劳动强度。该上轴车制造成本低,贴近用户需求,维护保养难度小,为转型升级的织造企业提供了新的选择。
猜你喜欢
纺织器材(2022年1期)2022-11-22 01:42:25
汽车实用技术(2022年5期)2022-04-02 09:36:40
汽车实用技术(2022年5期)2022-04-02 09:36:20
日用电器(2021年8期)2021-09-13 03:17:38
日用电器(2021年7期)2021-08-17 02:49:28
装备制造技术(2020年9期)2021-01-26 00:15:08
纺织器材(2020年5期)2020-12-21 04:05:16
中国新技术新产品(2020年4期)2020-05-05 15:49:48
棉纺织技术(2020年3期)2020-03-17 08:03:10
国际纺织导报(2019年6期)2019-09-05 11:04:12