
新型多功能可分离式家用护理床设计开发*
2023-01-30 02:11李纯淳卞青青杨丹宜许世强李奕莹
机械研究与应用 2022年6期
李纯淳,卞青青,杨丹宜,苏 江,许世强,李奕莹
(广东科学技术职业学院 机器人学院,广东 珠海 519090)
0 引 言
在国际标准中,失能人群是指由于疾病或者衰老导致生活无法自理的一些特殊的老年人群[1]。在第四次中国城乡老年人生活状况的抽样调查中,我国失能、半失能老年人已经达到4 063万[2],且有研究预计,我们在2050年将会有4亿多的老年人口,其中失能人口也将超过上亿人[3]。失能老年人由于身体机能的衰退,肌体活性不断减退;相较于普通人,老年人的卧床时间更长,由于行动不便,经常会长时间保持同一位姿,使得身体局部组织长期受压,导致压疮发生[4];同时病人长期得不到锻炼,肌肉容易产生废弃性萎缩、关节挛缩和僵硬,从而导致多种并发症的产生[5]。传统解决办法是护工或者亲人家属帮助失能老人翻身、起床等,工作量较大,需要长期看护[6],这不仅给家庭造成巨大经济压力,而且加重护工的工作量。因此,失能老人需要一款护理床解决如此困境[7-8]。
护理床是一种常用的智能护理设备。而近年来,现代科技也越来越多的应用到护理床上,开发探索了护理床的远程控制、辅助康复训练以及人机互动能力。姜生元等[9]研制了一种多功能康复床,该床具有抬背、轮椅转换、辅助排便等功能;张建国等[10]基于人体工学原理设计了护理床的上升机构和抬腿机构,并对其进行了运动分析;秦帅华等[11]设计了一种八杆单自由度起背机构,建立了相应的运动学模型;赵礼刚等[12]对抬背机构设计变量进行了研究,分析各变量对背板角加速度的影响;蒋皆恢等[13]基于物联网+技术研发设计出来可以利用移动终端对其进行远程控制的护理床,打破了距离对控制的限制,使其更具智能化;刘杰[14]基于人体运动学和人机工程学,设计了针对人体运动需求的多功能护理床,帮助失能人群进行基本的康复锻炼,提高了失能人员的身体素质;李素姣等[15]通过对各种技术单一的护理床进行对比,研发了多种技术融合的护理床智能技术,实现了单一技术的相互融合,优势互补。
由此可见,目前的护理床研发主要集中于单一功能研究、远程控制、辅助康复、技术互融、失能老人的身体状况与失能程度数据检测等方面,而对于失能人群的无帮助下独立起/卧床、自由出行、远程监控等方面研究较少。针对这一问题,笔者设计了一种多功能可分离式家用护理床,以实现无人帮助下卧姿与坐姿的转变、座椅高度调节、出行智能行走与智能避障、回床寻迹复位和家属远程监控等功能,减少失能人群对护工的依赖,解决失能人群独立生活问题。
1 总体结构设计
基于人机工程学原理,确定了各模块设计参数及性能指标。为满足失能人群对护理床的功能需求,护理床由固定床体和可移动式轮椅以及定位锁合磁吸式卡扣三部分组成,如图1所示。设计总体尺寸为1990 mm×1500 mm×650 mm。

图1 模型图1.固定床体 2.定位锁合磁吸式卡扣 3.可移动式轮椅
1.1 固定床体
固定床体设计由床头架、床板、床尾架与床尾架铰的置物板、床板的侧边分布传感器组成,如图2所示。当分离移动床体结构复位时,可以通过接收光电传感器的信号做距离检测,使分离移动轮椅结构准确复位,避免出现错位。
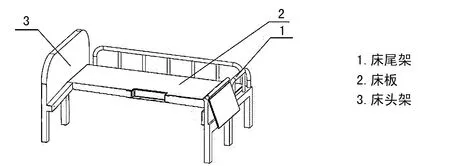
图2 固定床体
1.2 可移动式轮椅
移动轮椅由ROS小车、可调高度的剪叉机构、可调角度的折叠床板以及麦克纳姆轮组成。其中可调角度的折叠床板设计由背靠板、座板和腿板组成,三块板铰接,其折叠角度由两侧各三个电动推杆伸缩实现,如图3所示。

图3 可移动式轮椅1.麦克纳姆轮 2.ROS小车 3.电动推杆 4.背靠板 5.腿板 6.升降机构 7.座板
背靠板上设有与其两侧相适应的环抱式移位机构,可支撑背板与水平面垂直,底座下设有前导向装置、后驱动装置,推杆与活动板铰接。由此可见,产品的主要电路、控制板和驱动装置均装在可移动式轮椅的座椅上,最大程度的节省空间。
1.3 定位锁合磁吸式扣
定位锁合磁吸式扣主要是由分离移动轮椅结构内侧的伸缩护栏和床沿边的固定卡扣组合构成,制成榫卯结构,可实现床体精准定位。
2 控制系统设计
控制系统由TXT控制器、传感器等组成,通过蓝牙、手动遥控实现床椅分离、自动避障、寻迹复位、远程监控等功能。
2.1 控制系统组成
分析应用场景的性能要求发现,控制系统要求运算速度快;具有多任务的实时处理能力;抗振、抗干扰强,具有一定的可靠性;易于开发,易于进行功能扩展;定位的准确性高等。因此控制系统硬件选用TXT控制器、电机驱动器和漫反射光电传感器以及蓝牙串口通讯模块模块。
所设计的分离式多功能护理床对电动机的控制精度有很高要求,齿轮转动时有绝对线位移量,需准确定位,因此驱动器选用MC860H 驱动的 86/110 型双相混合式布进电机,其接口如图4所示。该驱动器微步细分有 16 种, 最大微步为 51 200 Pulse/rev;工作电流范围为 2.4~7.2 A,输出电流共有8档;具有自动半流、过压、过流保护等功能。
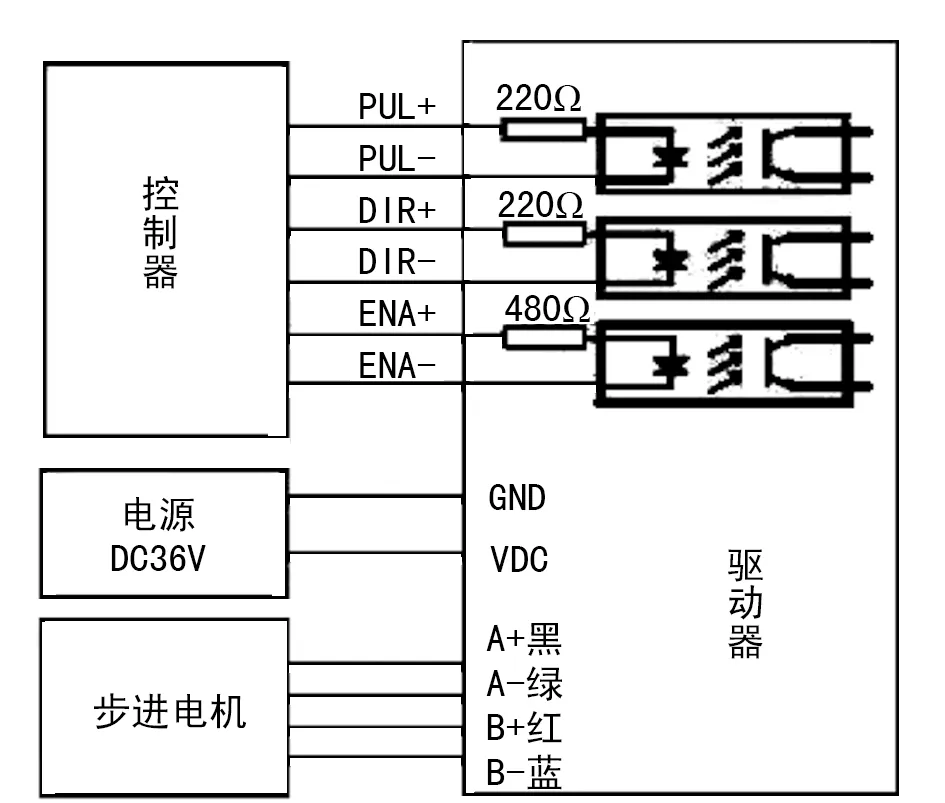
图4 驱动器接线电路端口图
工作时,HC860驱动器接收到一个脉冲信号,驱动步进电机按设定的方向转动一个固定的角度(即步进角)。可通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时也可通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
通信的蓝牙串口选用HC-05,支持3.2~6 V 电压和 TTL 电平,串口波频率1 200~230 400,可支持 Android 4.3 或 iPhone 4s 以上版本的手机,通讯距离40 m,工作温度-40~+85 ℃,接受灵敏度-96dBM@1Mbps, 发射功率-40~4 dBm。 漫反射光电传感器检测稳定灵敏、测量精度检测距离 1~100 mm,工作电压在 10~30 V, 体积小,不占用空间,安装于床板两侧。
2.2 控制系统框图设计
主控制器发送或者接收数字式步进电机驱动器MC860H信号,MC860H驱动电机转动相应的角度,控制行走装置及电动推杆移动,从而控制床板的角度的调节。TXT控制器扫描漫反射光电传感器传回的距离信号以及接收控制面板传输的指令并控制远程视频监控系统,如图5所示。
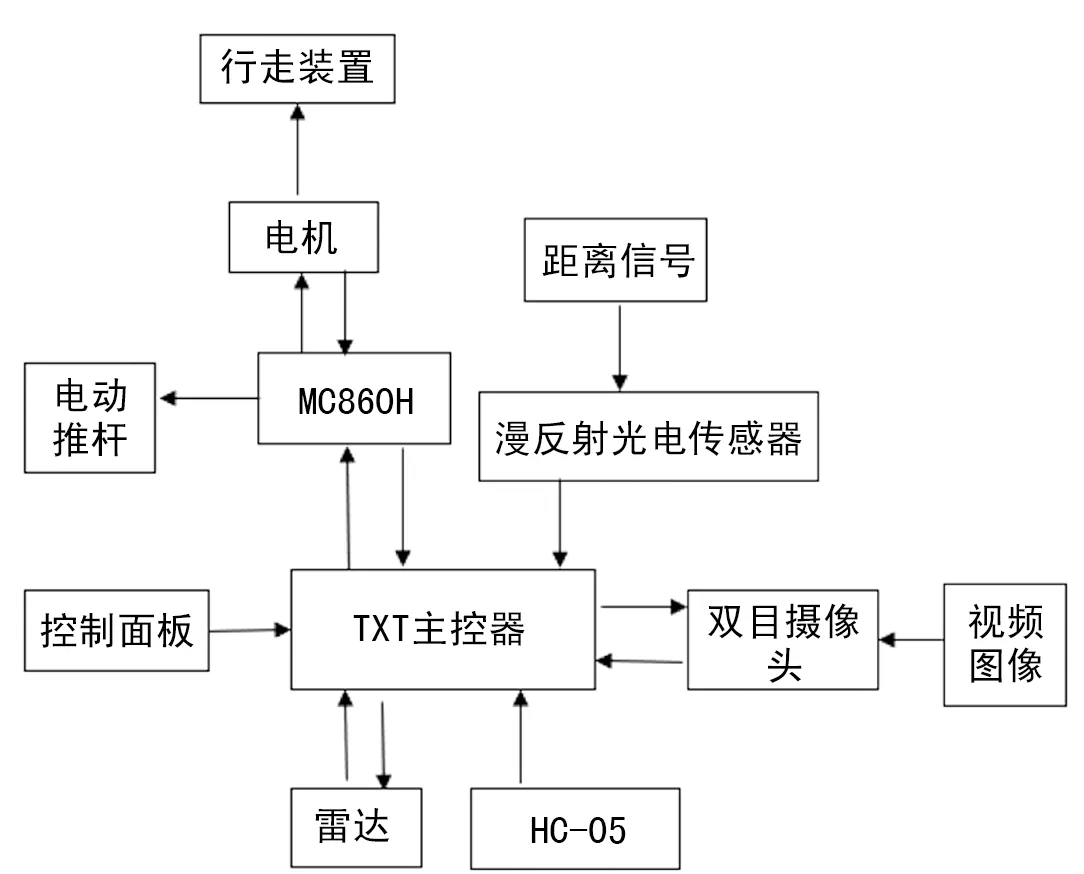
图5 控制系统框图
2.3 控制系统工作流程
控制系统执行任务的工作流程,如图6所示。上电后首先初始化,然后判断是否有查找任务,当有任务时通过调用相应代码启动步进电机转动,反之重新判断是否有查找任务;之后判断是否执行完毕,执行完毕则停止电机转动启动推杆,反之重新判断是否执行完毕;接着判断推杆是否退出配合,是则推杆归位,反之重新判断推杆是否退出并与止推轴承配合;归位后判断查找任务是否完成,是则系统恢复初始设置,反之重新启动相对应的代码从而启动步进电机转动不同的转角;最后任务完成结束。

图6 控制系统流程图
3 创新设计
3.1 床椅分离
出行时,定位锁合磁吸式卡扣脱开,控制器发送指令,通过MC860H驱动步进电机转动,调节背靠板和腿板角度,使可移动式轮椅由水平状态调整为坐姿状态。背靠板的可调角度0°~80°,腿板的可调角度0°~40°。角度调整完成后,通过电机正反转驱动齿轮、螺杆、升降机构调整座板高度,座板可调范围520~720 mm。最后通过麦克纳姆轮的转动移出床体,实现床-椅的转换和轮椅的分离、座椅高度的调整,为失能人群出行做好准备。
3.2 轮椅智能避障
在失能出行或活动时,轮椅底部的雷达将进行路况360°扫描并将数据上传控制器,控制器根据障碍物的距离,规划行驶轨迹,实现智能避障。移动轮椅运用可全方位移动的麦克纳姆伦,实现全方位转向。内置激光雷达传感器与GPS结合,通过各种传感器和三大信息板块实现信号传递,减低行驶的盲区,实现了及时避障功能,解决因反应不灵敏而导致的摔跤等问题。
3.3 循迹复位
为方便失能人群回床休息,设置了一键复位按钮,可移动式轮椅通过寻迹数据分析,规划回到固定床体的最短路径。可移动式轮椅按照规划路径移动,当可移动式轮椅到达指定识别区域时,被感应器群捕捉到指定区域的信号将会通过数据分析提供最方便快捷的床体和轮椅结合位置,然后通过麦克纳姆轮全方位移动微调,定位锁合磁吸式卡扣吸合,气缸伸出,可移动式轮椅由坐姿转变为平躺姿势,免去失能人群繁琐的操作便可回到床体内部,使回程更智能,使用更放心。
自动复位锁合是将床身附加的各项传感器接收的模拟信号传送至TXT控制器并转换为数据信号,再由反馈机构将信号转化为对应的微调动作,以降低分离后结合的错位误差。
因此,循迹复位是通过路径规划使可移动式轮椅自动到达床体内部,锁合磁吸式卡扣,复位三块床板,将轮椅展开后成为床。使用过程中,速度缓慢,避免出现倾倒现象。
3.4 开发在线监控APP、远程监控系统
基于ROS平台,采用C语言开发了远程监控系统。对于无法实时陪伴亲属,通过手机APP或者电脑端调用双目摄像头,亲属可实时观察患者状态。亲属远程监控功能让出行更放心,家人更安心。
4 实验验证与结果分析
此次测试在模拟环境下进行的,硬件测试环境:电脑1台、手机1部、硬件护理床1张,如图7所示。
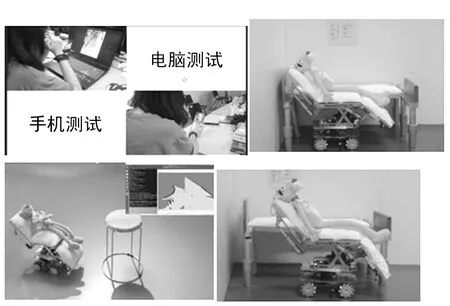
图7 动作与性能测试
测试步骤如下。
(1) 基础动作测试:按键动作、监控APP,测试结果如表1所列。测试结果正常,实现预期功能。
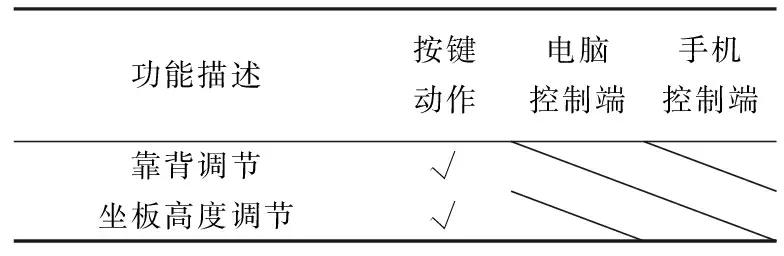
表1 基础动作测试
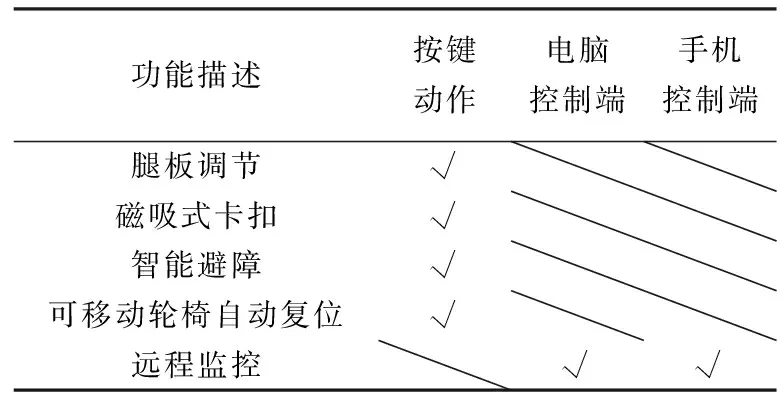
续表1 基础动作测试
(2) 床体动作性能测试,测试结果见表2所列。
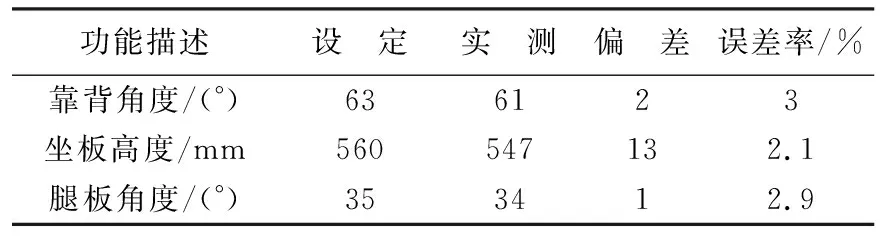
表2 性能测试
从测试结果可以看出,应用此系统后,床体动作较平稳,床体动作角度、高度误差率控制在3%,使用者在安全操作的前提下增加了便利性。
5 结 语
文中详细介绍了多功能可分离式家用护理床系统研发背景、总体结构设计、控制系统设计以及创新设计。在搭建多功能护理床模型后,使用电脑和手机进行了功能和性能测试,对床椅分离、智能避障、循迹复位、远程监控功能进行测试,对背板、座板以及腿板进行性能测试,结果表明床体运行平稳,角度以及高度调节误差率仅3%,结果表明本设计可行,可解决失能人群在无护工帮助下坐姿和卧姿的转换以及下床难的问题。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
机械制造(2022年3期)2022-04-07
家畜生态学报(2020年2期)2020-03-26
中国特种设备安全(2019年10期)2020-01-04
电子制作(2017年17期)2017-12-18
中国医疗器械信息(2017年17期)2017-11-06
中国核电(2017年1期)2017-05-17
肿瘤预防与治疗(2015年1期)2015-09-26
中国医疗设备(2015年5期)2015-01-27
