
基于扩展计划行为理论的驾驶员跟驰意向分析
2023-01-29 12:26李霞郭梦婷张孝铭啜二勇周巍
深圳大学学报(理工版) 2023年1期
李霞,郭梦婷,张孝铭,啜二勇,周巍
1)河北工业大学土木与交通学院,天津 300401;2)帝国理工大学商学院,英国伦敦SW7 2AZ;3)天津市交通科学研究院,天津 300060;4)河北省高速公路集团有限公司京雄筹建处,河北保定071700
随着人工智能和第5代移动通信技术等先进科技的发展,自动驾驶技术日趋成熟,据美国电气和电子工程师协会(Institute of Electrical and Electronics Engineers,IEEE)预测,2040年全球上路汽车总量中自动驾驶车辆将占75%[1],因此,在未来很长一段时间内,道路交通流将处于自动驾驶车辆和传统车辆混行状态[2],出现传统车辆驾驶员跟随自动驾驶车辆行驶的情况不可避免.驾驶员的意向决定了行为[3],因此,从社会心理学角度出发,探讨影响驾驶员对自动驾驶车辆跟驰意向的心理因素以及各因素间的关系,对未来人机混驾交通流研究具有重要意义.
目前国内外学者在自动驾驶车辆对驾驶员跟驰行为的影响方面已进行了相关研究,如侯培国等[4]指出,当前方为自动驾驶车辆时,驾驶员会因不熟悉自动驾驶车辆性能产生恐惧感,进而增大跟车间距,随着驾驶员对自动驾驶车辆了解程度的提升,恐惧值会呈现先上升再下降的趋势;RAHMATI等[5]采用实车试验法研究驾驶员在跟随自动驾驶车辆或传统车辆行驶时的行为差异,发现跟随在自动驾驶车辆后的驾驶员,在速度和加速度方面表现出较低波动性,MAHDINIA 等[6]的研究也呈现出类似结论;ZHAO 等[7]利用实车试验研究自动驾驶技术的“信任者”、“怀疑者”及“不敏感者”3类驾驶员,跟随在自动驾驶车辆后的速度及跟车间距变化,发现驾驶员面对自动驾驶车辆时的行为反应取决于其对自动驾驶技术的主观信任程度.以上研究表明,自动驾驶车辆的出现必然会影响驾驶员的跟驰行为,但未深入分析造成跟驰行为变化的心理因素以及这些因素间的相互作用.
计划行为理论(theory of planned behavior,TPB)由AJZEN等[8]基于理性行为理论最先提出,该理论能从心理学角度解释个体行为决策过程.作为一种成熟的社会心理学理论,TPB已在交通领域得到广泛应用,研究角度主要有驾驶员的危险性驾驶行为、防御性驾驶行为、竞争性驾驶行为及变道行为等[9-12],但将TPB 应用于人机混驾环境下驾驶员行为分析的研究较少,利用该理论进行驾驶员对自动驾驶车辆跟驰行为意向的分析研究尚属空白.基于此,本研究引入驾驶员对自动驾驶车辆的了解程度、风险感知及接受程度3个变量,建立基于扩展TPB的驾驶员跟驰意向模型框架,基于模型框架编制量表并进行问卷调查,构建结构方程模型,利用SPSS和AMOS软件分析所建模型的有效性以及各变量间的影响关系.
1 基于扩展TPB的驾驶员跟驰意向研究模型
TPB 认为个体行为由意向(behavioral intention,BI)决定,而意向又受到行为态度(behavioral attitude,ATT)、主观规范(subjective norm,SN)和知觉行为控制(perceived behavioral control,PBC)因素影响.然而在进行行为意向决策分析时,若仅考虑单一的TPB 理论模型,可能会存在一定局限性,BAMBERG 等[13]指出,在TPB 基础上引入新变量可以提升模型的预测能力和解释能力,因此,需要结合研究目的对模型进行合理修改与扩展,如文献[14]新增法律规范和行为经验两个变量研究驾驶员的疲劳驾驶行为;文献[15]新增过去行为和无害感知两个变量研究驾驶员的酒驾行为.本研究结合人机混驾交通流环境,新增驾驶员对自动驾驶车辆的了解程度(degree of familiarity,DF)、风险感知(perception of risk,PR)以及接受程度(degree of acceptance,DA)3个变量,构建基于扩展TPB的驾驶员跟驰意向研究模型,如图1.
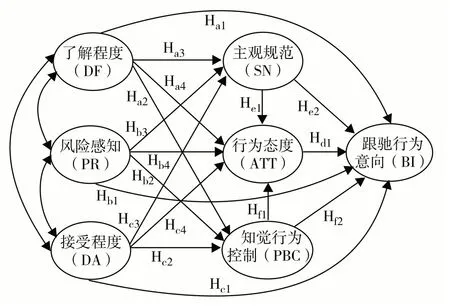
图1 基于扩展TPB的驾驶员跟驰意向研究模型Fig.1 Driver's car-following intention model based on extended TPB.
结合研究模型提出以下32 个假设:DF 和DA分别正向影响SN、ATT、PBC 和BI,分别记为Ha1—Ha4、Hc1—Hc4;PR 负向影响SN、ATT、PBC和BI,记为Hb1—Hb4;SN、ATT 及PBC 分别正向影响BI,记为He2、Hd1和Hf2;SN 和PBC 分别正向影响ATT,记 为He1和Hf1;ATT、SN 和PBC 在DF、PR、DA 及BI 之间存在中介作用,分别记为Hd2—Hd4、He3—He5和Hf3—Hf5;SN 和ATT、PBC 和ATT在DF、PR、DA 及BI 之间存在多重中介作用,记为Hg1—Hg6.
2 问卷设计与调查
基于AJZEN等[8]提出的问卷设计标准流程,以构建的模型为框架编制问卷.问卷分为3部分,其中,第1部分为人口统计学基本信息,包括受访者的性别、年龄、驾龄及对自动驾驶车辆的信息来源4个单选题项;第2部分为李克特5级量表,设为7个维度,分别为了解程度(DF)、风险感知(PR)、接受程度(DA)、行为态度(ATT)、主观规范(SN)、知觉行为控制(PBC)及跟驰行为意向(BI);第3 部分为驾驶员对自动驾驶车辆的实际了解程度调查,从自动驾驶车辆关键技术、发展趋势、优缺点及队列控制技术角度出发,设置4道多选题,用于量表中驾驶员自述了解程度的验证.
第2 部分的5 级量表从“1”到“5”表示从“非常不赞同”到“非常赞同”,问题项设计具体如下.①DF 为受访者对自动驾驶车辆相关信息的了解程度,共设4个题项,如“我了解自动驾驶车辆的关键技术”;②PR为受访者对自动驾驶车辆所存在潜在风险的感知程度,共设3个题项,如“我担心周围行驶的自动驾驶车辆会突然失控引发交通事故,使我面临一定的危险”;③DA 为受访者在心理上对周围行驶自动驾驶车辆的接受程度,共设3个题项,如“若周围出现自动驾驶车辆,我在行驶时会感到更安心”;④ATT 为受访者对自动驾驶车辆的态度看法,共设3个题项,如“我认为自动驾驶车辆能够减少交通事故,使道路运行更安全”;⑤SN 为乘客或媒体报道等社会主体对受访者的跟驰意向产生的影响,共设3个题项,如“身边主流媒体对自动驾驶车辆的正向宣传,会使我在驾车时更倾向于跟随在自动驾驶车辆后方行驶”;⑥PBC为受访者对跟驰行为控制难易程度的感知,共设3个题项,如“我在驾车时能够轻松应对跟随在自动驾驶车辆后方可能会出现的风险”;⑦BI为受访者对自动驾驶车辆的跟驰意向,共设3个题项,如“在未来自动驾驶车辆投入使用后,相较于跟随普通车辆,驾车时我更愿意跟在自动驾驶车辆后方行驶”.
在问卷设计完成后,首先对28 名受访者进行预调查,根据受访者反馈修正题项并对复杂题目增加图片说明.利用问卷星平台发放问卷进行正式调查,调查对象为非职业机动车驾驶员.正式调查共收集问卷400 份,剔除答题时间小于3 min、大于20 min以及多个题项选同一答案的无效问卷,最终得到有效问卷331份,满足“样本量至少为量表题中观察题项数量5~10倍”的要求.
3 数据分析
3.1 描述性统计分析
样本人口学基本情况见表1.样本性别分布相对均衡,年龄集中在25~40 岁,驾驶经验≥2 a 的样本占比87%,新闻网络是驾驶员获取自动驾驶车辆相关信息最主要的方式,人口统计学基本信息表明问卷调查结果具有代表性.将代表驾驶员对自动驾驶车辆实际了解程度的4道多选题得分与代表驾驶员自述了解程度的4道量表题得分对照,皮尔逊相关性检验结果显示4组数据均在0.01级别下显著相关,表明问卷中的了解程度调查结果可靠.

表1 样本人口学基本情况Table 1 Demographic statistics of samples
对问卷进行相关性分析发现,BI 与年龄(P=0.589)、性别(P=0.284)、驾驶经验(P=0.622)及信息来源(P=0.484)不显著相关,与DF、PR、DA、ATT、SN 及PBC 显著相关且P值均为0,因此,本研究在模型构建和分析时主要考虑这7个影响较大的变量.利用SPSS 24.0 软件计算各变量的偏度和峰度,取绝对值后的偏度和峰度值范围分别为0.082~0.701 和0.588~1.299,参考BENTLER等[16]提出的标准,若偏度绝对值小于2,峰度绝对值小于5,即可说明数据符合正态分布,本研究各变量数据均符合标准,为后续运用极大似然法检验模型质量奠定基础.
3.2 问卷信度效度检验
采用克朗巴哈(Cronbach'sα)系数检验量表内在一致性.表2为问卷信效度检验结果.可见,所有题项的矫正项总计相关系数(corrected item total correlation,CITC)均大于0.4,量表整体及各变量Cronbach'sα系数均大于0.8,表明问卷具有内部一致性.KMO(Kaiser-Meyer-Olkin)和Bartlett 球形检验结果显示量表整体及各变量KMO 值均大于0.7,显著性值Sig 均小于0.05,说明量表数据适合做因子分析.进一步利用SPSS进行因子分析结果显示7个因子累积方差解释率为75.312%,大于60%,说明题项信息可被这7个因子有效提取.

表2 问卷信效度检验结果Table 2 Questionnaire reliability and validity test results
采用平均方差萃取值(average variance extracted,AVE)、组合信度(composite reliability,CR)及标准化因子荷载系数验证聚合效度.由表2可知,因子荷载和AVE值均大于0.5,CR值均大于0.7,表明测量题项能够收敛于其所在构面,量表聚合效度良好.表3 为量表中各因子区分效度检验结果.可见,各因子的AVE 平方根均大于该因子与其他构面的相关系数,表明不同构面上的测量题项具有差异性,量表区分效度良好.

表3 量表因子区分效度检验结果1)2)Table 3 Test results of discriminant validity of factors in scale
3.3 模型质量评估
以DF、PR 及DA 为外因变量,ATT、SN 及PBC为中介变量、BI为被解释变量构建初始结构方程模型(structural equation model,SEM),采用极大似然法检验模型质量,检验结果显示调整拟合度指数接近0.9,另外7 个指标均大于0.9,参考BENTLERT等[17]对拟合指标值的建议,可判断本研究构建的驾驶员跟驰意向SEM 模型具有良好拟合效果,各适配度指标值见表4.

表4 修正前后的SEM适配度指标Table 4 Goodness-of-fit indexes of SEM before and after revision
3.4 路径分析
利用AMOS 24.0 软件对SEM 进行路径分析,验证SEM 模型中各因子间的回归系数是否达到显著水平并判断第1节中的假设是否成立,初始路径分析结果见表5.由路径检验结果可知,DF 对ATT、PBC正向作用显著;PR对ATT、PBC负向作用显著;DA 对ATT、SN 正向作用显著;DF、ATT、SN 及PBC 对BI 正向作用显著;SN、PBC 对ATT 正向作用显著.假设Ha1、Ha2、Ha4、Hb2、Hb4、Hc3、Hc4、Hd1、He1、He2、Hf1及Hf2得到验证,Ha3、Hb1、Hb3、Hc1及Hc2未得到验证.
根据检验结果删去不显著的路径后再次检验模型质量,结果显示模型拟合指标值达到标准(表4),分析路径修正后的SEM,由表5可知,各路径均达到显著水平,修正后的驾驶员跟驰意向SEM 模型见图2,图中潜在变量(椭圆形)与测量变量(矩形)间的系数为因子荷载;测量变量旁的系数为因子荷载的平方;外生潜变量(DF、PR及DA)间的系数为相关系数;外生潜变量与内生潜变量(ATT、SN、PBC 及BI)以及内生潜变量间的系数为路径系数;内生潜变量旁的数字为解释变异量.根据模型修正与检验结果,得到各潜变量间的关系为

图2 修正后驾驶员跟驰意向SEM模型Fig.2 Modified diagram of driver's car following intention SEM model.

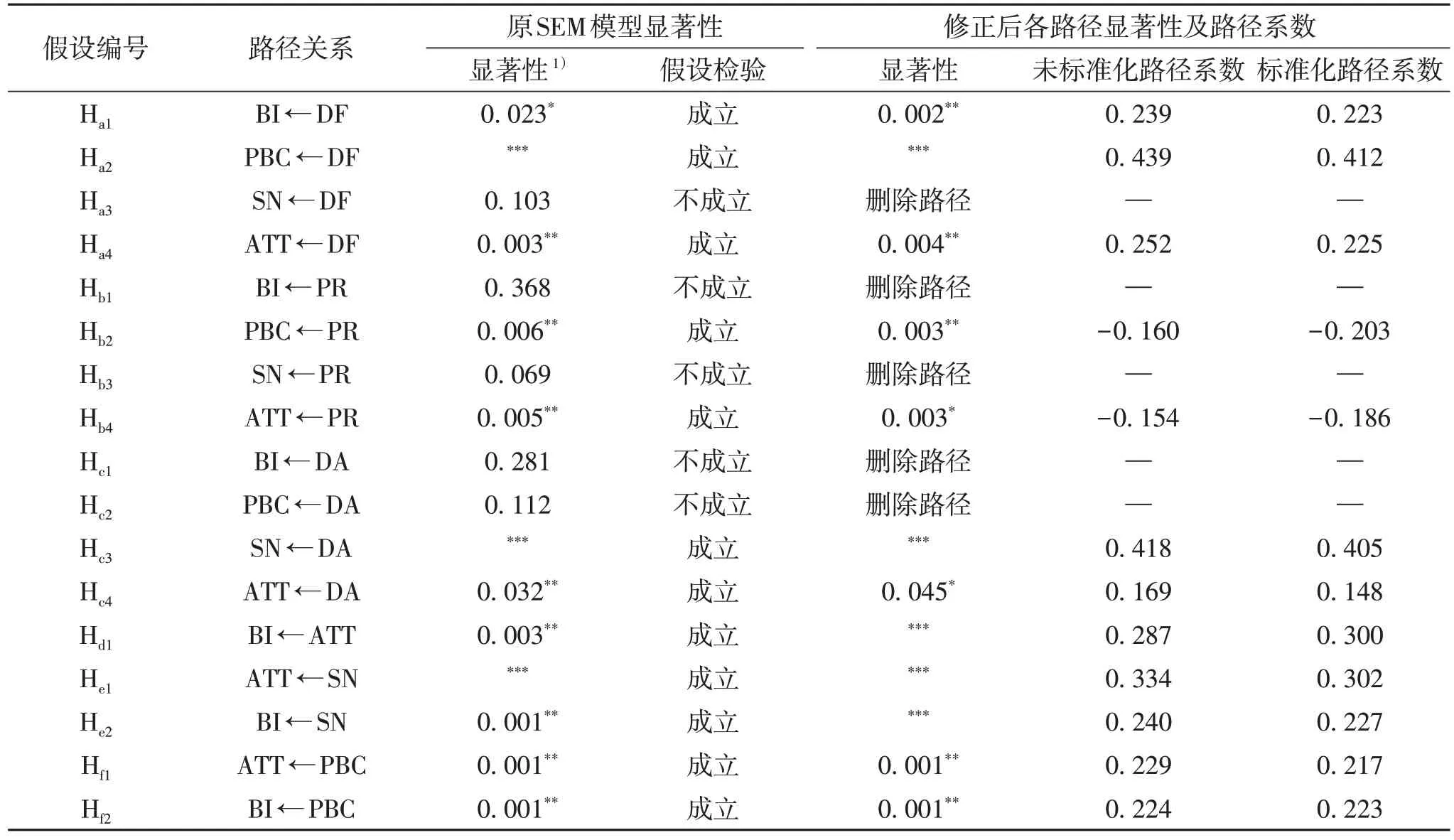
表5 模型路径检验结果Table 5 Model path tests results
3.5 中介效应分析
由3.4节路径分析结果可知,DF 对PBC、ATT及BI 均有显著直接作用,故ATT、PBC 在DF 和BI之间可能发挥部分中介作用(假设Hd2和Hf3);PR对PBC、ATT 作用显著,对BI 作用不显著,故ATT、PBC 在PR 和BI 之间可能发挥完全中介作用(假设Hd3和Hf4);同理,SN、ATT在DA和BI之间可能发挥完全中介作用(假设He5和Hd4).路径分析结果显示,SN、PBC对ATT均有显著正向影响,故PBC和ATT在DF与BI、PR与BI之间可能存在链式中介作用(假设Hg4和Hg5);SN和ATT在DA与BI之间可能存在链式中介作用(假设Hg3).
采用AMOS 软件中的bootstrap 及user-defined estimands功能编写代码检验中介效应,设置样本抽样次数为3 000,有偏校正置信区间为95%,以总效应估计值置信区间是否包括0为判断标准,检验中介效应是否成立,检验结果见表6.可见,假设Ha1、Hd2、Hf3及Hg4成立,DF 对BI 直接效应、间接效应均显著,PBC、ATT 在DF 和BI 之间发挥部分中介作用;假设Hd3、Hf4及Hg5成立,PR 对BI 仅间接效应显著,ATT、PBC 在PR 和BI 之间发挥完全中介作用;假设He5和Hg3成立,DA 对BI 仅间接效应显著,SN在DA和BI之间发挥完全中介作用.假设编号为He3、Hg1、Hb1、He4、Hg2、Hc1、Hd4、Hf5及Hg6的路径检验结果显示置信区间包括0,即中介效应不存在,假设不成立.

表6 中介效应分析Table 6 Mediation analysis results
4 结果讨论
基本潜变量ATT、SN 及PBC 对BI 均产生正向显著影响,表明计划行为理论可用于解释人机混驾环境中传统车辆驾驶员对自动驾驶车辆的跟驰意向.其中,行为态度对驾驶员跟驰意向的影响最大,知觉行为控制和主观规范对驾驶员跟驰意向的影响略低于行为态度.类似的结果在前人研究中也得到过体现,如张彦宁等[18]构建的驾驶员超速行为SEM 模型拟合结果表明,驾驶员对激进驾驶这一行为的态度越积极,产生加速行为的意愿越大,且在态度、主观规范及知觉行为控制三者中,态度与激进驾驶行为意向的标准化回归系数最大.本研究针对基本潜变量的研究结果表明,在未来自动驾驶车辆投入使用后,可通过提高驾驶员对自动驾驶车辆的积极态度来提高驾驶员对自动驾驶车辆的跟驰意愿,使传统车辆与自动驾驶车辆更为协调友好地在道路系统中共同行驶;周围朋友、乘客对自动驾驶车辆的积极看法以及新闻媒体的正向报道也会促进驾驶员跟随自动驾驶车辆行驶;对自身跟驰行为控制能力认知越高的驾驶员会更易跟随在自动驾驶车辆后方行驶,但若驾驶员对自身行为控制能力的认知和实际能力不匹配,则可能会引发危险驾驶行为,故在未来的驾驶证考试中可增加驾驶员与自动驾驶车辆的模拟交互驾驶测试项,用于测试驾驶员行为控制能力.
针对拓展潜变量DF、PR 及DA,DF 既能直接影响BI,也能通过影响PBC 和ATT 间接影响BI;PR仅通过中介变量PBC和ATT间接影响BI;DA仅通过中介变量SN 和ATT 间接影响BI.以上研究结果表明,驾驶员对自动驾驶车辆相关控制技术及发展趋势的了解程度越高或在心理上对自动驾驶车辆的接受程度越高,就越倾向于跟随在自动驾驶车辆后方行驶;驾驶员对自动驾驶车辆运行存在潜在风险的感知越强烈,对自动驾驶车辆的态度就越消极,自身知觉行为控制能力也会降低,进而造成跟驰意愿的减弱.在未来人机混驾环境下,若驾驶员对自动驾驶车辆了解不足或不准确,则可能会产生远离自动驾驶车辆或紧跟自动驾驶车辆行驶等极端驾驶行为,这类行为会降低交通效率和安全性,建议交管部门向驾驶员更为全面地科普自动驾驶相关知识,让驾驶员正确认识自动驾驶的优缺点,使其在人机混驾环境下能够安全合理地完成与自动驾驶车辆的协同行驶,提高整个道路系统的运行效率.
需要注意的是本研究的基本假定为道路交通处于从纯人工驾驶到纯自动驾驶的过渡期,此时驾驶员对自动驾驶车辆的了解程度、风险感知及接受程度大致呈现正态分布,而当自动驾驶车辆面向社会全面普及后,了解程度等变量会产生显著变化,此时需要再次调查验证模型.
结语
本研究基于计划行为理论,新增驾驶员对自动驾驶车辆的了解程度、风险感知以及接受程度3个扩展变量,建立人机混驾环境下驾驶员跟驰意向结构方程模型,从心理层面揭示了解程度、风险感知、接受程度、行为态度、主观规范及知觉行为控制6个因素对驾驶员跟驰意向的作用.研究结果表明:①驾驶员对自动驾驶车辆的了解程度、行为态度、乘客或新闻媒体等社会主体对自动驾驶的宣传以及驾驶员对自身跟驰行为控制能力的感知均会对驾驶员跟驰自动驾驶车辆的意愿产生显著正向影响;②驾驶员对自动驾驶车辆的了解程度会对行为态度及知觉行为控制产生正向显著影响;③驾驶员对自动驾驶车辆的接受程度会对行为态度、主观规范产生正向显著影响;④驾驶员对自动驾驶车辆的风险感知会对行为态度、知觉行为控制产生负向显著影响;⑤在3个扩展潜变量中,了解程度对驾驶员跟驰意向既有直接效应又有间接效应,而接受程度和风险感知仅能通过中介变量对跟驰意向产生间接效应.以上结果表明本研究所建立的基于扩展计划行为理论的驾驶员跟驰意向结构方程模型对人机混驾环境下驾驶员面对自动驾驶车辆时的跟驰行为意向具有良好解释力.研究结果可为今后人机混驾交通流分析及未来交通安全教育及管理措施制定等提供参考.
本研究尚存一定局限性,如不同交通条件下驾驶员的心理素质可能有所差异,在面对自动驾驶车辆时的行为意向也会有所差别,在今后研究中会进一步对驾驶员进行细化分类并增加额外变量,如驾驶员对周围交通环境、道路拥挤程度的感知能力等,进一步完善现有模型.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
猪业科学(2021年3期)2021-05-21
活力(2019年19期)2020-01-06
中国中医急症(2019年10期)2019-05-21
中国修辞(2017年0期)2017-01-31
公民与法治(2016年4期)2016-05-17
中国卫生标准管理(2015年1期)2016-01-15
中国中医眼科杂志(2015年1期)2015-12-28
心理学探新(2015年4期)2015-12-10
