山苍子生物学特性与机械采收可行性分析
2023-01-28 15:26:36黄俊霖马稚昱韦鸿钰刘洪利
现代农业装备 2022年6期
褚 璇,黄俊霖,马稚昱,韦鸿钰,刘洪利
(仲恺农业工程学院机电工程学院,广东 广州 510225)
0 引言
山苍子(Litsea cubeba)又名木姜子,山鸡椒等,是一种优良的速生木本芳香油料树种,其全株均含有芳香油,籽、杆、根和叶都可以利用,在食用香料、日用化工、航空润滑油和医药产品的生产中有广泛应用[1-2]。我国山苍子资源占全世界的90%,种植总面积有1.44 万hm2,广泛分布于我国长江以南的广西、广东、福建、云南、四川等省[3]。同时,我国也是世界上最大的山苍子油生产国和出口国,其年产量14.01 万t,出口量占全球市场的80%[4]。因此,大力发展山苍子产业有利于优化农业产业结构,促进农民增收致富,助推乡村振兴。
目前,山苍子产业初步形成了以林下种养、森林景观利用为主体的林下经济产业体系的基本格局,随着山苍子深加工产业的逐步发展,产品的多样化开发,山苍子产业链逐渐完善[5]。目前针对山苍子的研究主要涉及优良品种培育[6-7]、栽培管理[8]及精深加工工艺优化[9-12]等方面。但由于山苍籽果实的采收季节性很强、时效性要求高,且其采收情况直接关系到出油率及出油质量,还关系到育苗成败[13]。因此,山苍子采收也是制约我国山苍子产业发展的瓶颈问题之一。
1 山苍子采收现状与问题分析
迄今为止,我国山苍子仍然以手工收获为主,劳动强度大,工作效率低。山苍子的生长环境、采摘要求等均导致其采收面临“无机可用”的困境。2019-2021 年连续对广东省连山县山苍子生产区采收情况进行调研,种植户或合作社通常选择雇佣工人完成采收,其价位通常在150 元/天,采摘成本较高。另外由于采摘熟练程度和山苍子树的长势不同,工人采摘效率差异显著,每人每天最多采收50 斤,这也导致山苍子的采收效率较低,并造成了大量鲜果不能及时采收而浪费。因此,开发和研究先进的山苍子采摘工具,提高山苍子采摘的机械化水平,对促进山苍子生产发展具有积极和重要的现实意义。
1.1 山苍子的生物学特性制约果实采摘方式
山苍子采收季节性很强,采集过早,果实含油少,水分重,含醛量也不足;采集过迟,果实中的芳香油会逐渐消失,遇到风雨也会落地腐烂[14];因此应在其成熟时及时采收。山苍子成熟期为7 至8 月,气候炎热,采摘环境较为恶劣。另外,山苍子收获的农艺要求很高,要做到轻采轻摘,将果实连带果柄一起摘下,因为无论是采摘过程中造成的果实破皮还是果柄脱离,都会造成果实中芳香油的挥发与氧化[15]。在采摘时通常将带有部分叶子的细枝一簇一簇摘下,再进行逐粒采摘。山苍子树一般2~3 m,最高的高达8 m,树枝高而分散,为采尽高处果实通常需要搭梯上树,采摘工人安全也难以保证。山苍子的这些生物学特性均决定了它采摘收获的难度大、效率低。
1.2 山苍子生长环境增大采收难度
山苍子生长具有很强的区域性,在我国主要分布于南方及西南温暖地区。野生山苍子资源分布整体较分散,常生于荒山、荒地、灌丛或梳林内。随着现代林业建设力度加大,部分省市已经开始人工培育山苍子林[4],但无论是野生山苍子还是人工培育林,其种植地貌多以低山、丘陵为主,复杂的地形地貌、落后的基础生产条件,均导致了传统的采摘机械无法应用,同时目前市面上缺乏与之相适应的农机,使得山苍子采摘主要依赖人工完成。
2 常见采收技术与山苍子机械采收可行性分析
目前尚无针对山苍子采收机械的研究,但花椒、枸杞等果实与山苍子在外形或植株存在相似形,因此针对此类小型果的采收机械及技术可以为山苍子采收机械的设计提供参考。目前此类果实的常见的机械采摘工具(方式)包括:剪切式采收、机械振动采收及负压采收等,本节结合不同采摘方式分析其应用于山苍子采收的可行性。
2.1 剪切式采收
在种植于丘陵山地的花椒或枸杞的采收中,修枝剪、高枝剪、长柄剪等已有所应用。这种采摘方式是利用剪刀将成熟果实与枝条一同剪下[16],再组织人员集中将果实采摘收集。目前市面上的这类机具品种繁多,包括手动剪、气动剪及电动剪等等。较为著名的产品有日本ARS 公司的园艺剪、德国GARDENA 公司的树枝剪和高枝剪、意大利CAMPAGNOLA 司的F/6U 型气动高枝剪和Star50 型气动高枝剪等等[17]。另外,也有研究人员结合结构设计及运动仿真对高枝剪这类采摘器具进行研究。例如,刘志刚等[18]基于SolidWorks 软件,提出了一种新型高枝花椒采摘剪的结构设计方案,并对其进行运动仿真分析。钱稷等[19]设计了一款可调式握力高枝剪,并根据大宗果树的生长参数,对剪刀伸缩杆结构、伸缩调节器和剪切部件进行了参数设计和三维建模。
这类采摘装置是一种辅助性采摘机械,在山苍子采收中也同样适用。普通剪刀可用于新林或1.5 m以下矮林的采收,高枝剪可以采摘较高处的枝条与果实[20]。但在实际采摘过程中,由于果实枝条的高度不等,高处枝条的剪切定位存在一定困难,并且对于高处的枝条(3 m 以上)仍需搭梯上树才能采摘。因此这种方式在山苍子采收中也存在一定限制。
2.2 机械振动采收技术
振动式收获机械的工作原理是在不损伤果树前提下,将激振力施加于果树,使果实分离脱落,然后再通过收集装置将脱离的果实收集。由于收获效率较高,振动式收获机械在规模化的林果业采摘中应用较多。机械振动采收技术在美国、英国、德国等国家研究与应用已较为普遍[21],从动力学模型构建、激振参数影响、果树振动响应到振动采收机设计等均进行了细致深入的研究与分析[22-24]。目前,像葡萄、柑橘、核桃、橄榄等用于加工或果皮较厚的果品利用这种方式均实现了机械化收获[25-26]。我国在振动采收方面的相关研究起步较晚,主要针对黑加仑、银杏、红枣、核桃、蓝莓等果品。目前常见的机械振动采收多采用振摇、梳刷、冲击和拍打等形式,不同振动形式的其工作原理和特点如表1 所示。

表1 振动采收原理及特点
在与山苍子类似的果实,如花椒、枸杞及沙棘等果实的采收中,梳刷或振摇是最常用的2 种方式。胡明明等[37]通过对枸杞植株的模态分析,结合曲柄滑块机构的运动分析设计出了一种振动式枸杞采摘机,如图1 所示。李瑞等[38]基于下桩采摘法的振动式花椒采摘方法,通过ADAMS 软件对花椒枝和花椒果进行柔性体建模,设计了一种振动式花椒采摘机。张伟等[39]设计了钙果的梳刷采摘装置,其梳刷部件首先贴近地面,将梳齿插入枝条,然后向上运动将枝条扶起,由于梳齿间隙小于果实直径且大于枝条直径,在枝条扶起过程中,实现果实与枝条分离。刘磊等[40]设计了辊刷式蓖麻收获机采摘机构,两辊刷等速相向旋转,刷丝自下向上作用于蓖麻果实,使蓖麻果与茎秆分离。但以上所述装置均为大型机械,而目前山苍子以野生为主,分布在丘陵、荒山等地区,地形复杂,因此,这类大型采收机械难以适应山苍子山地采收需求。

图1 振动式枸杞采摘机构结构简图
在梳刷或振动采收的便携设备中,张文强等[41]设计了变间距梳刷式枸杞采收装置,如图2(a)所示。万芳新等[42]设计的机械式花椒采摘机,利用拨椒轮高速旋转时产生的梳刷作用和拨椒轮与弧形凹板间相对运动所产生的搓擦作用收获花椒。于英杰等[43]利用梳刷式小粒咖啡采摘装置中指排的转动完成咖啡果实采摘,如图2(b)所示。指排在转动的同时会拍打果实,同时枝条在指排的作用下也会产生一定振幅和频率的晃动,因此,此装置同样也是基于振动与梳刷2 种方式共同作用下实现的采摘。这几种装置便携易操作,并且均具有较好的采收效果,可为山苍子采摘提供思路。

图2 便携式梳刷采摘机械示意图
在梳刷或振动采收过程中,梳齿或激振装置容易损伤枝叶,并且在梳刷或振落果实的过程中容易打伤果实,或者梳落果实时造成果柄脱落的损伤。在山苍子采收过程中,果实破损容易造成果实中芳香油的挥发,因此,将这种方式应用于山苍子采收时,如何避免梳刷造成果实的损伤与果柄脱落是研发的难点。应深入研究果实振动采收机理、果树的振动响应特性与果实损伤规律,实现山苍子高效低损的采收。另外,由于大型振动采收机械对地形有较高要求,便携式采收装置在果实收集方面也存在一定困难,山苍子在种植方面也需进一步推进种植环境,进行宜机化改造,为机械化采收提供条件。
2.3 负压吸收采摘技术
负压吸收采摘技术是采用负压和撕扯原理实现果实与果枝的分离,由于基于以此原理的采收机械通常需要可产生较强负压的大型动力机械,因此这种方式对地形要求较高。但目前也有一些小型负压采收机械的设计。王峰等[44]设计了一种负压吸收式花椒采摘机,如图3 所示,其可不用割下枝条,较少损失地实现花椒籽粒采收,同时整个系统机构简单,制造和维护成本低,需要消耗的能量也较低。李树森等[45]将负压技术与梳刷采收技术结合,设计出了一种气吸梳刷式枸杞采摘机。采收过程中,风机抽吸风将果柄由下垂状变为水平状,再通过梳刷工作头转动将果实摘下。由于小型负压采收机械设备吸力小,如何实现果柄与树枝之间的高效分离而不损伤果实或花芽及嫩叶是其应用难点。
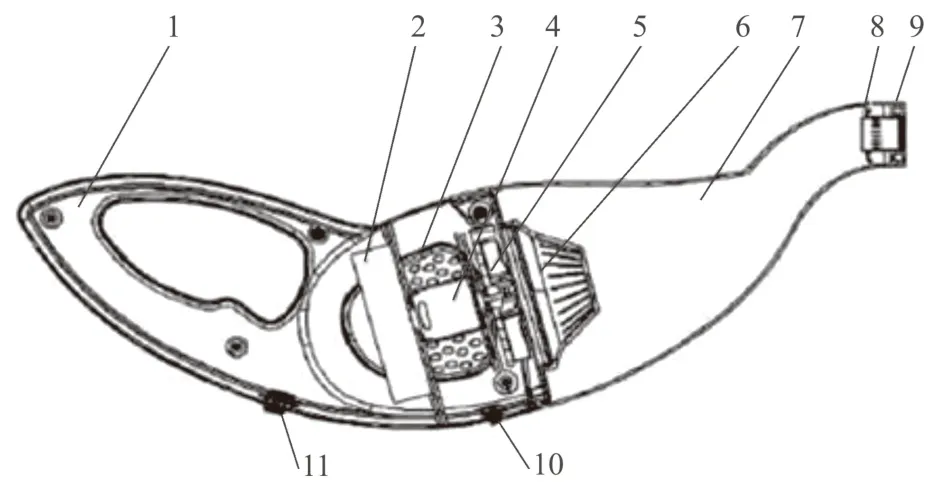
图3 负压吸收式花椒采摘机结构图
3 山苍子采收方案
3.1 山苍子生物学特性分析
山苍子枝条细长,分支较多;其果实接近球形,直径约5 mm,3~5 颗簇生;果实通过果柄与枝条连接,果柄长度通常为2~4 mm。为更好分析山苍子机械采收可行性,本文初步分析了山苍子鲜果和枝条的物理机械特性。选择无病虫害、无损伤的山苍子枝条和果实,采用直尺与游标卡尺测量枝条的基本参数,并进一步以不同树龄的枝条为试验对象,分别从逆枝条和顺枝条生长方向测量了果柄脱落所需要的力,结果如表2 所示。

表2 山苍子枝条基本参数
3.2 高通量梳刷式山苍子果枝分离与收集装置设计
基于前文分析,提出了一种高通量山苍子果枝分离与收集装置设计方案。工人把成熟果实的枝条剪下后,再进行集中式果枝分离,避免了在果园直接应用振动式大型采收机器难以适应的问题,同时果实批量分离后,直接进行加工,减短了破损果实存放时间,有利于实现山苍子果实采收与加工的高效衔接,减少了果实中芳香油的挥发浪费。所设计的高通量山苍子果枝分离与收集装置如图4 所示,主要由夹持输送带、双毛刷辊轴、果实收集箱及驱动电机组成。夹持输送带表面有橡胶凸起可起到夹持住枝条的两端推动着枝条向里运动的作用,双毛刷辊轴与输送带运动方向呈一定夹角安装,以保证枝条在向里运送过程中始终在毛刷辊筒的扫刷范围,双毛刷辊筒由电机带动做旋转运动,将枝条上的果实梳落,同时由毛刷滚筒正下方的收集箱收集梳落的果实。

图4 高通量梳刷式山苍子果枝分离与收集装置装配图
基于剪枝采收后山苍子果枝特性,枝条长度最小为91 cm,因此调整所设计装置中夹持输送带左右宽度为约80 cm,以满足绝大多数枝条的输送需求;另外,由于枝条中底部与顶部最小直径分别为8.22 mm 和0.85 mm,故调整夹持枝条底部和顶部间隙分别为约8 mm 和0.5 mm。在整个机构中,毛刷辊筒质量较大,且仅靠两端的轴承座支撑,因此其强度必须满足要求。进一步对毛刷辊轴作静态结构力学分析。在工作过程中,毛刷辊轴主要受到电机的驱动和自身重量,因此在分析时在滚轴两侧轴上添加载荷,其中电机提供的转矩为12.5 N·m,添加至一侧轴的压力为190 N,分析结果如图5 所示。由图可知滚筒所受最大应力结果为34.25 MPa,而不锈钢的屈服力为172.3 MPa,故其强度满足要求。
图5 毛刷滚轴有限元分析结果
利用通常的方法对轴承座进行分析,轴承座底部通过螺栓螺母固定,其受力主要来自毛刷滚轴的压力,因此在仿真过程中,添加载荷190 N,分析结果如图6 所示。由图可知轴承座所受最大应力结果为297.8 kPa,而轴承座的屈服力为275.7 MPa,故所设计强度满足要求。

图6 轴承座有限元分析结果
4 展望与讨论
山苍子的生长环境是限制其实现机械化采收的重要因素,应坚持以机适地与以地适机相向而行的原则,在设计相应采收机械时应注重与实际相结合。另外,山苍子的规范化种植管理也必不可少,应根据山苍子的生长特性,确定种植区域,规模发展。同时进一步完善配套设施建设,对农田进行宜机化改造,改善丘陵山区农机通行作业条件,突破自然环境的限制。
山苍子机械化采收难点是高效低损地收集果实。因此深入研究山苍子枝条与果实等的生物学特性,能够为设计山苍子采收机械中枝条的抓取、切割机构的结构及材料选择提供理论依据。目前虽然暂无对山苍子机械采收的研究,但对花椒、枸杞等果实的采收均可为山苍子采收机械设计提供基础。在山苍子采收机械设计中应充分借鉴相关的新理论与技术,并与山苍子采收实际相结合,进而设计出高效、安全、操作简单的采摘机械。
在提升山苍子生产机械化过程中,树立“研、推、用”一体化思维。企业与科研机构应开展深度合作,形成科技创新、技术服务、产业开发有机联系的产学研紧密合作体系,着眼于全产业链,研发制作和推广应用两手发力;并开展多渠道、多层次、多形式的农民培训,提高农民机械化操作的技术与技能水平,提高山苍子采收机械的接受程度。
猜你喜欢
新疆农业科学(2023年6期)2023-07-13 03:53:58
食品工业(2022年12期)2023-01-12 07:18:32
湖南农业科学(2022年5期)2022-06-22 08:26:06
湖北农业科学(2022年23期)2022-02-13 14:53:02
基层中医药(2021年8期)2021-11-02 06:25:06
农业与技术(2021年5期)2021-03-31 12:26:16
今日农业(2020年15期)2020-12-15 10:16:11
中国粮油学报(2019年4期)2019-07-12 09:06:40
山东农业工程学院学报(2019年3期)2019-05-11 07:41:50
作文通讯·高中版(2017年11期)2017-12-20 08:09:43