
飞行器制导控制综合教学实验平台设计与实践
2023-01-27 12:32陈柏霖王正平赵良玉
实验室研究与探索 2022年10期
王 伟,陈柏霖,陈 栋,王正平,赵良玉
(1.北京理工大学宇航学院,北京 100081;2.陆军炮兵防空兵学院高过载弹药制导控制与信息感知实验室,合肥 230031)
0 引言
飞行器制导控制综合教学实验是我校本着新时代高效育人,重在培养高素质综合性拔尖创新人才[1-3]等目标,而面向宇航学院的本科生及研究生开设的一门实验课程。对应飞行器设计、探测制导与控制、航天工程等多门专业课,为专业课提供理论与实验教学的帮助。为了使实验课与理论课进程同步、保证学生的学习效果,该实验课年均课程实验环节90 学时,年均可接纳课程实验教学人数300 人次。飞行器制导控制综合实验教学平台积极培养航空航天类专业学生实验和实践环节的能力,将国内外重大项目管理方法用于实验课程训练[4]。以自制无人飞行器制导控制嵌入式一体化实验仪为教学案例,实验仪器的建成为学生的设计能力、创新能力的提高创造了条件。采用“六模块×七环节”即“前沿、样机、轨迹、制导、性能、控制”ד功能原理、任务设计、硬件设计、软件设计、系统联调、仿真验证、总结分析”的实验教学模式[5-6],强化学生对实验工作的认知,全面提高学生的实验能力、创新能力[7-8]。
同时该项目将高水平的实验成果和学生创新实践需求高度融合,形成的成果又能进一步推动实践教学工作,并且具有一定的技术基础,能够较好地将科研成果转化为实验教学[9-10]。
1 制导控制教学方案设计
1.1 实验课程涉及的相关知识点
结合飞行器制导控制综合平台的教学用途,学生通过该仿真实验可以了解及掌握的知识点有:①航空航天类典型无人飞行器的地位及其国内外最新研究进展;②高动态旋转飞行器、无人飞行器的系统设计方法、飞行原理、基本构成、各部分性能;③高动态旋转飞行器、无人飞行器的制导控制系统的设计原理和分析设计方法[10-11];④飞行器载多种敏感传感器和模块(如卫星、无线传输、陀螺和加速度计、舵机)等的功能与应用[12];⑤高动态旋转飞行器、无人飞行器制导控制计算机的功能分解与硬件设计;⑥高动态旋转飞行器、无人飞行器制导控制系统的软件设计与流程设计;⑦高动态旋转飞行器、无人飞行器系统的功能测试和半实物仿真试验;⑧高动态旋转飞行器、无人飞行器飞行轨迹的个性化设计和提升优化;⑨高动态旋转飞行器、无人飞行器飞行性能和精度的分析和评估;⑩高动态旋转飞行器、无人飞行器与其他无人系统如无人车、无人船系统的组网和协同。
1.2 培养目标
培养学生理论和实际相结合的能力,团结、协作和创新能力:①通过学习和查询最新和前沿知识设计无人飞行器和高水平飞控系统的能力;②进行总体任务分解和系统与分系统方案设计、具有仿真分析的能力;③完成系统功能和分系统性能指标论证和实验验证方案的能力;④协同完成飞行器各分部件原理样机具体软硬件设计、流程设计的能力;⑤协同完成飞行器系统原理样机具体相应控制算法的能力;⑥协同完成飞行器各分部件功能测试、系统联调、半实物仿真等的能力;⑦完成飞行器系统根据具体任务完成飞行轨迹的设计能力;⑧完成飞行器系统根据具体任务完成飞行性能和精度分析和评估的能力;⑨完成飞行器系统设计总结、成果和缺点不足总结的能力。
2 实验教学系统方案
2.1 实验步骤
实验步骤包括7 个环节(42 个实验操作步骤):①高动态飞行器复合制导模式的系统功能分解、制导控制原理框架图设计;②在了解当前高动态飞行器前沿技术的基础上进行飞控系统任务分解、设计、飞控设计框图、飞控系统数学仿真结构框图、姿态测量算法设计;③飞控系统模块化、嵌入式、一体化硬件设计和调试;④飞控系统软件流程设计、输入输出框架设计、具体软件模块组成设计等;⑤飞行器系统联调、地面静态试验、指标验证;⑥飞行器半实物仿真、飞行轨迹和效果评估验证;⑦进行飞行器数据分析、精度、影响评估和实验报告总结[13-14]。系统流程框图如图1 所示。
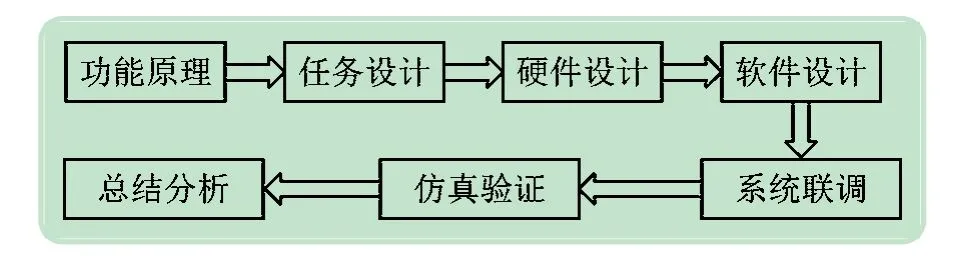
图1 飞行器复合制导模式的系统流程
2.2 功能原理
飞行器复合制导[15]模式的系统功能分解、制导控制原理框架图设计如图2 所示。
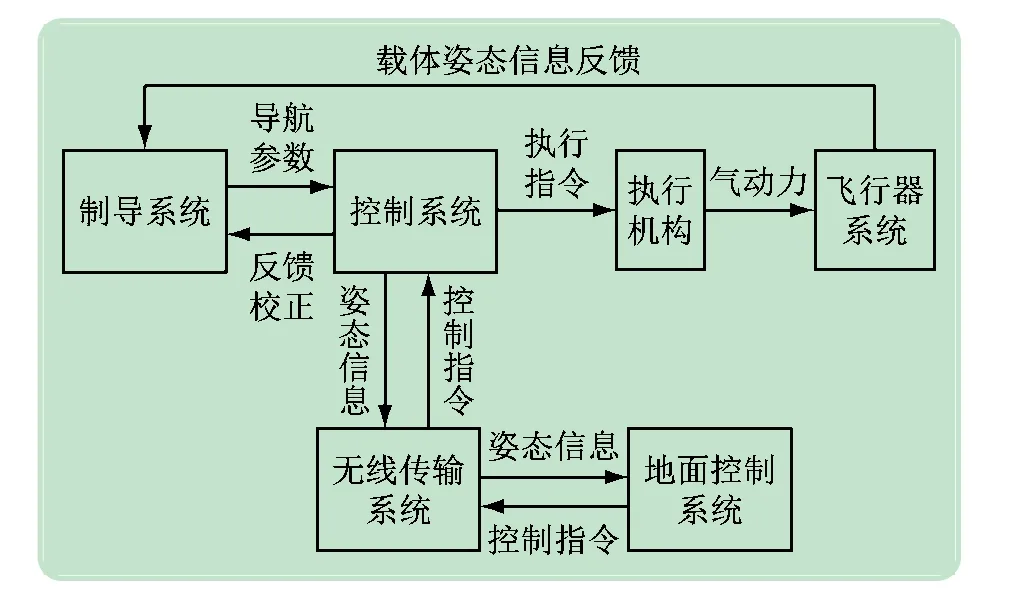
图2 飞行器复合制导模式的系统功能模块
2.3 任务设计
飞行器控制系统任务分解、设计,及各部分数学仿真结构框图设计如图3 所示。
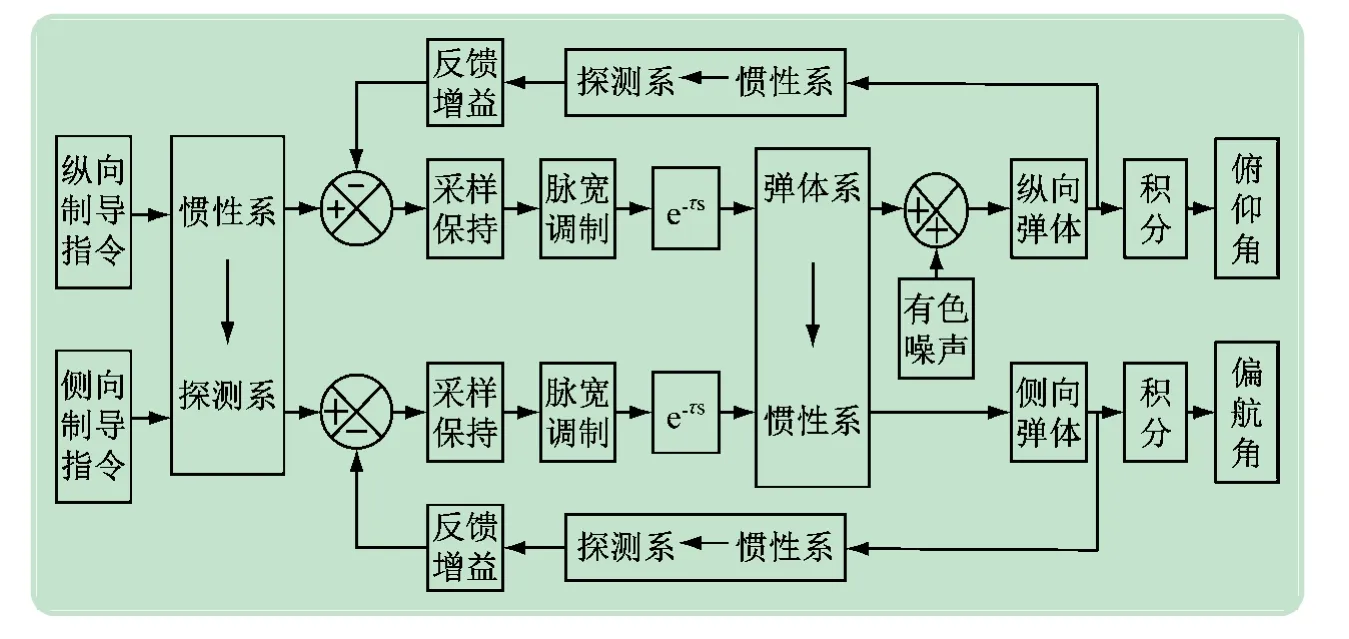
图3 控制系统数学仿真结构
3 自制实验教学装置概况与设计
3.1 实验教学装置概况
团队依托武器系统国家级虚拟仿真中心、北京市航空航天教学实验中心、机电控制教学实验中心完成了无人飞行器制导控制嵌入式一体化实验装置的设计和教学应用。该无人系统嵌入式一体化测控系统是一款综合性新型实验箱,具有使用方便、灵活、上手快、性价比高功能齐全等特点,该实验箱不仅适用于通信、自动化、测控、工业控制和电力控制等领域,还适用于科学研究、毕业设计、电子竞赛、产品开发。
3.2 原理图
实验装置由MCU 模块、触摸显示模块、波形采集模块、4 ×4 矩阵模块、GPS 模块、陀螺加速度计模块、直流电动机、舵机、步进电动机等组成,其原理图如图4 所示。
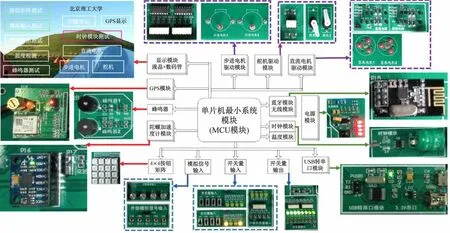
图4 实验教学装置原理图
3.3 硬件设计
经过硬件模块化、一体化设计和工艺化改进后的自制实验教学装置的产品,如图5 所示。

图5 自制实验教学装置
该实验仪为无人飞行器制导控制嵌入式一体化实验仪,同时配有相关的使用说明书、实验说明书等自制教材。摆脱了传统教学仪器体积大、设备复杂等缺点,实现了专业性、实用性、经济性的兼顾,起到了良好的教学效果。
4 教学内容与支撑软件
仿真实验实践教学有利于拓宽学生的学习思路,提高教学效果,也是当前实验教学的必备内容之一。
针对飞行器制导控制综合实验课程进行了软件组成框图、流程图等设计。将虚拟仿真实验软件嵌入实验仪中,做到虚实结合,达到了综合教学的目的。
4.1 软件组成框图
飞行器制导控制综合实验软件组成的框图如图6所示。

图6 软件组成框图
4.2 软件流程图
飞行器制导控制综合实验软件的工作流程框图如图7 所示。
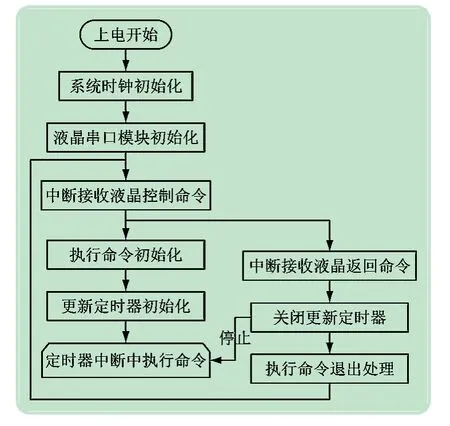
图7 软件流程图
4.3 虚拟仿真实验界面
学生通过该实验可以了解航空航天与兵器概论课程的授课内容及课程大纲,了解本实验项目在该课程中的地位和作用,了解远程多管火箭武器系统的国内外最新研究进展。通过360°旋转了解远程多管火箭炮的组成及相关参数及火箭弹的整体结构和内部构造,并通过三维模型的解剖视图了解火箭弹各组成部分的内部结构,同时学习和了解各组成部分的功能。部分虚拟仿真实验界面如图8 所示。
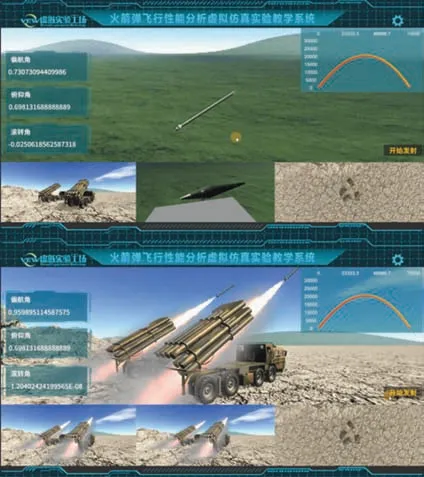
图8 部分虚拟仿真实验界面
4.4 系统联调
对飞行轨迹和地面联试进行了实验验证,通过加入阻尼回路对飞行器的姿态角进行调节,如图9 所示,可以明显看出飞行器姿态角摆动幅度变小,同时过滤噪声,使飞行器姿态角的摆动稳定在2°之内,提高了飞行器的稳定性。

图9 加入阻尼回路的飞行器姿态
由图10 所示的飞行器制导控制实验结果可见,采用本技术的飞行器俯仰角和偏航角明显收敛更快、误差更低,并且能够将误差控制在2°之内,提高了飞行器的稳定性。

图10 加入阻尼回路前后的飞行器姿态比较
5 教学实验成果
该教学实验平台在飞行器制导控制教学设计与实践的过程中,积累了诸多理论知识及教学方法。已发表发明专利1 项“飞行器制导与控制实验仪器”,软件著作权2 项“飞行器制导控制实验仪姿态显示软件v1.0”“飞行器制导控制实验仪监控程序软件v1.0”及教改类论文7 篇,具有代表性的是以第一作者发表的有飞行器测试技术之课程拓展、飞行器制导控制关键技术之课程拓展[6]、航空航天专业实验教学体系探索、研究生创新能力培养探索[5]等一系列成果。
6 结语
针对航空航天类专业的本科生高年级及研究生,以专业课程建设为基础设计了飞行器制导控制综合教学实验平台。两学年的新型实验课程的教学实践表明,学生的团队协作能力、综合学习能力、创新设计能力、整体综合成绩均有显著提高。并且经过该课程培训的学生多次获得国家电子设计竞赛一等奖、北京市电子竞赛一等奖和国际阿布扎比无人机比赛金奖等,同时该无人飞行器制导控制嵌入式一体化实验仪在第六届全国高等学校教师自制实验教学仪器设备创新大赛上荣获二等奖。学生参加国际高水平无人飞行器比赛350 人次,创新能力得到全面提高,同时深度参与多项国际项目科研和学术交流活动等。为培养航空航天类综合创新能力的拔尖人才和骨干力量提供了理论和教学实验平台的支撑。
猜你喜欢
海峡科技与产业(2021年1期)2021-05-22
武术研究(2020年2期)2020-04-21
汽车维修技师(2019年7期)2020-01-16
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
中国教育技术装备(2015年21期)2015-03-11
新高考·高一物理(2014年4期)2014-09-17
