基于无人机图像混合像元分解模型提高小麦基本苗数的反演精度
2023-01-16 09:51杜蒙蒙李民赞姬江涛AliRoshanianfard
农业工程学报 2022年17期
杜蒙蒙,李民赞,姬江涛,Ali Roshanianfard
基于无人机图像混合像元分解模型提高小麦基本苗数的反演精度
杜蒙蒙1,2,李民赞3,姬江涛1,Ali Roshanianfard4
(1. 河南科技大学农业装备工程学院,洛阳 471003;2. 机械装备先进制造河南省协同创新中心,洛阳 471003;3. 中国农业大学智慧农业系统集成研究教育部重点实验室,北京 100083;4. 莫哈格达阿德比利大学农业与自然资源系,阿尔达比勒 566199)
及时、精确地获取小麦基本苗数在田块内部的空间差异信息,有利于实施精准变量追施氮肥,实现化肥减量增效。传统的无人机农业遥感仅关注植被与土壤2类特征而忽略混合像元的影响,导致小麦基本苗数反演精度差、可靠性低。为解决上述问题,该研究利用大疆Mini 无人机获取麦田图像,基于不变目标法完成图像的相对辐射标定,并利用像元纯净指数提取植被端元与土壤端元。根据端元光谱特性建立混合像元的线性分解模型,求解混合像元中植被组分的丰度,基于像元统计法计算植被覆盖度,进而建立植被覆盖度与小麦基本苗数地面真值的线性回归模型。该研究方法获得的模型决定系数2为0.87,均方根误差为1.97株/m2。而基于传统植被指数法分别利用可见光波段差分植被指数、绿红差分指数、绿红比值指数获取的相应植被覆盖度与小麦基本苗数地面真值的线性回归模型决定系数2及均方根误差分别为0.79、0.56、0.47及6.06、7.04、4.43株/m2。由此可知,基于混合像元分解模型定量反演小麦基本苗数的方法具有较高的精度,研究成果可为小麦精准减量追施氮肥作业提供数据支持。
无人机;模型;反演;农业遥感;无人机图像;混合像元;小麦基本苗数
0 引 言
小麦是中国第二大粮食作物,约占全球总产量的18%。近年来,随着选育优良品种、优化水肥运筹及建设高标准农田等技术的推广实施,小麦产量得到了大幅提升[1-2]。另一方面,随着工业化与城镇化深入发展,中国小麦种植面积逐年减少,亟须提高小麦单产以保障粮食供应能力[3]。小麦单产受品种特性、气候条件及栽培措施等多重因素影响,由亩穗数、穗粒数及千粒质量3个指标共同决定[4]。亩穗数作为小麦产量的基础,是影响产量的主导因素。小麦基本苗数是亩穗数的重要来源,同时是小麦分蘖的基础。小麦基本苗数与个体分蘖能力决定小麦群体数量的动态变化趋势,并最终影响亩穗数[5-6]。
氮是作物生长发育必需的大量元素,是叶绿体和蛋白质的重要组成成分。小麦在生长前期对氮肥施用量较为敏感。在分蘖能力强、群体数量充足的区域过量施用氮肥,不仅增加生产成本、降低氮素利用率与氮肥农学效率,还会造成小麦倒伏、有效分蘖成穗率下降等问题[7]。此外,过度施用氮肥易导致氮素淋失,造成面源污染,妨碍农业可持续发展[8]。开展节肥行动,实现化肥使用量负增长,已成为全社会共识。
忽视小麦基本苗数及茎蘖群体的实际发育状况,盲目开展减量追施氮肥易造成小麦长势差、群体数量少、产量低。此外,小麦发育状况受土壤肥力、墒情及积温等多种因素影响,群体长势的空间差异较为显著[9]。在田块尺度上进行均一化减量追施氮肥可有效抑制大群体贪青旺长,但无法同时促进小群体的分蘖能力。通过无人机遥感技术监测小麦群体数量的动态变化,按需精准变量追施氮肥,可有效解决这一结构性矛盾。
无人机遥感技术监测小麦基本苗数建立在图像分割与植被特征提取的基础上[10-15]。遥感图像以像元为单位获取地物信息,每个像元表征的地物实际尺寸即空间分辨率。设置较低的无人机飞行高度可以获取高空间分辨率遥感图像,但受图像传感器视场范围的限制,其单幅图像覆盖面积较小,作业效率低。反之,设置较高的无人机飞行高度则可以获取单幅覆盖面积较大的遥感图像,大大提高作业效率、降低内业处理成本,但遥感图像的空间分辨率较差,影响特征提取精度[16]。此外,在遥感图像中,像元不仅具有光谱属性,还可以表征地物的空间分布状况。仅包含一种地物的像元称为端元,而包含2种及以上地物的像元则为混合像元。小麦在苗期群体数量不断增加、叶片重叠度与植被覆盖度持续升高[17-18]。在低空间分辨率的无人机遥感图像中除植被端元与土壤端元外,包含大量植被—土壤混合像元。与之相对应地,在高空间分辨率的无人机遥感图像中,单个像元表征的地物尺寸降低至毫米级别,像元数量激增,导致沿叶片边缘分布的大量像元中混入土壤组分,形成混合像元[19-20]。因此,通过改变无人机遥感图像的空间分辨率,不能从根本上消除混合像元的问题。然而,传统的农业定量遥感研究仅关注植被与土壤2类特征而忽略混合像元的影响,无法在大田环境下高效、准确地实现小麦群体数量的定量解析。
因此,本研究基于无人机遥感图像,建立小麦苗期的混合像元分解模型,提高小麦基本苗数的定量反演精度,为精准减量追施氮肥、调控小麦群体长势提供数据支持。
1 材料与方法
1.1 无人机遥感图像及地面真值获取
本研究采用大疆Mini 航拍无人机,搭载CMOS (Complementary Metal Oxide Semiconductors)传感器,无人机及图像传感器参数如表1所示。
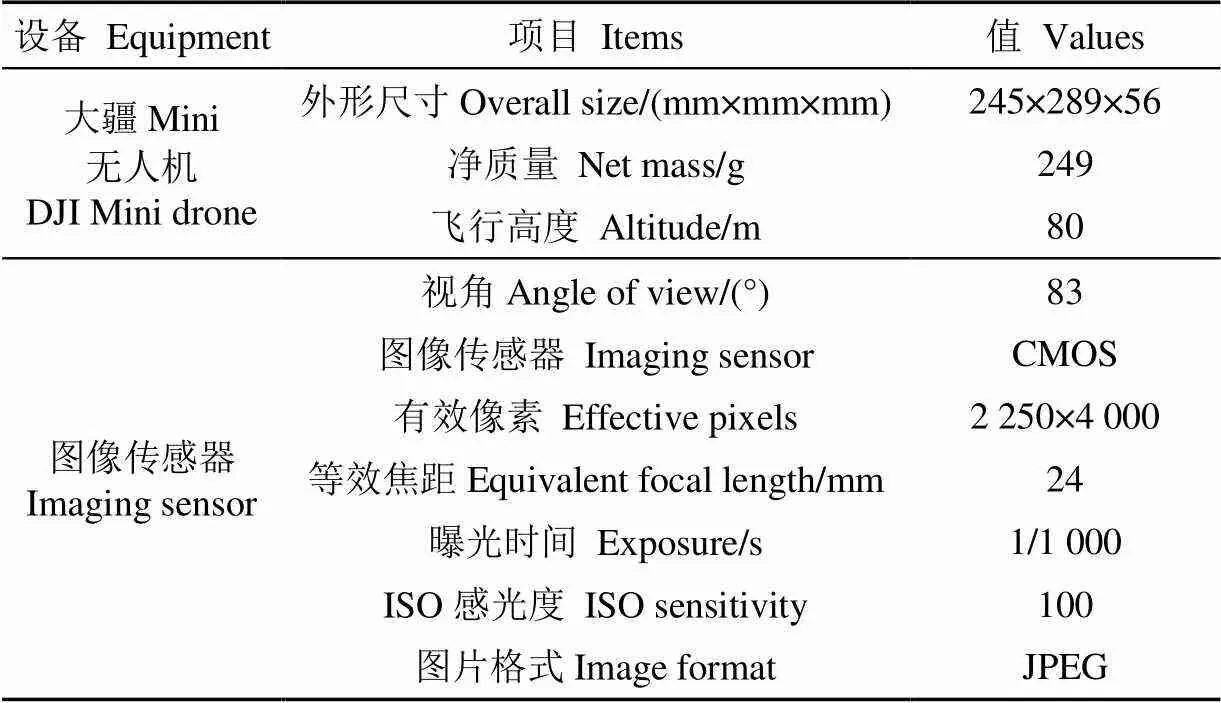
表1 试验设备
小麦试验田位于河南省开封市(北纬34°44′~35°01′,东经114°41′~115°15′)(图1a),年均降水量670 mm,年有效积温4 592 ℃,无霜期219 d,属半干旱大陆性季风气候。试验田为多年耕种熟地,长约50 m,宽约10 m,如图1b所示。试验田土壤成土母质为黄河冲积物,以潮土为主,肥力中等,前茬作物为花生。供试小麦品种为“矮抗58”,2021年10月9日使用8行单箱播种机完成小麦播种,行距为0.2 m,播种量为165 kg/hm2。基肥为磷酸二铵、氯化钾(施用量均为225 kg/hm2)与尿素(150 kg/hm2)混合施用,于小麦播种前撒施后翻埋。
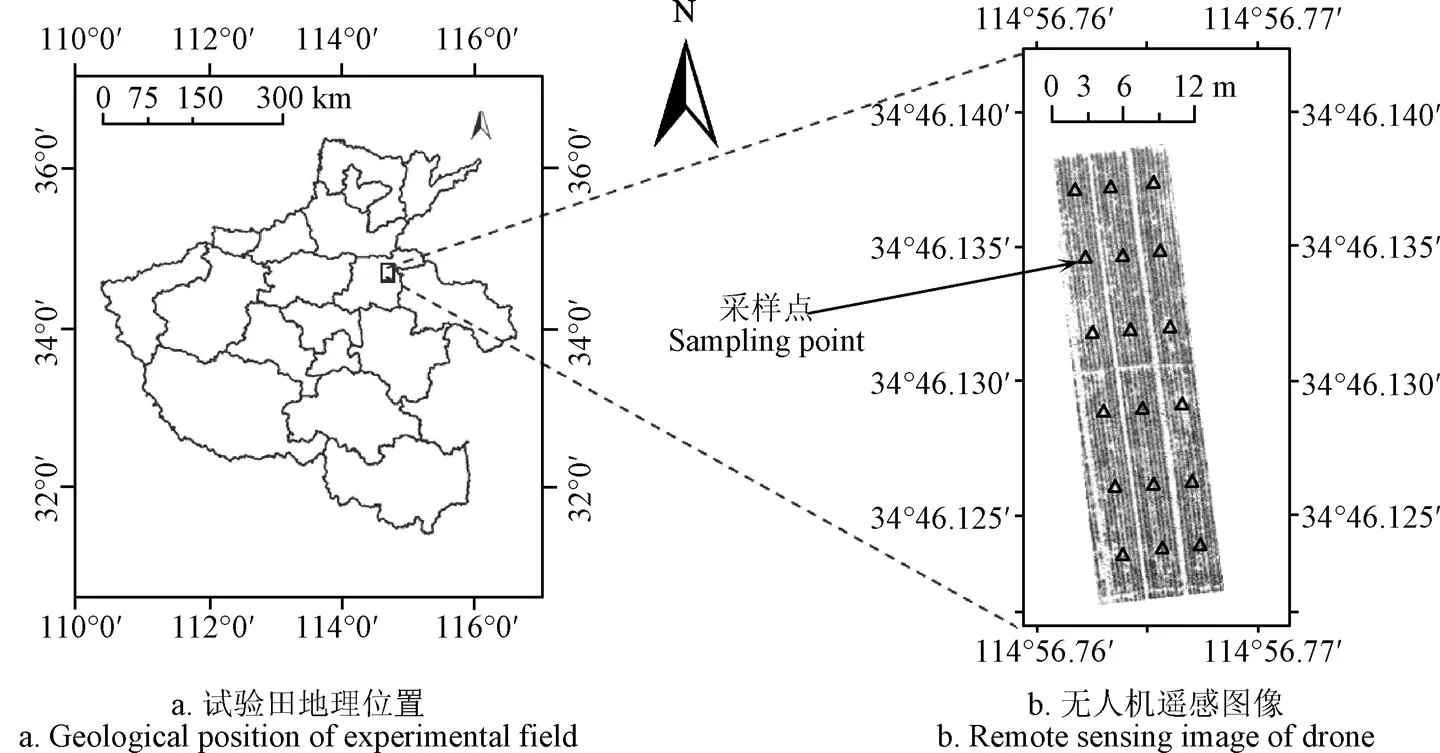
图1 试验区域
无人机遥感试验于2021年12月5日实施,航拍相机的快门速度为1/1 000 s,ISO感光度为100,飞行高度为80 m,无人机遥感影像的空间分辨率约为2.5 cm。使用高精度PPK-GPS(Post Processing Kinematic Global Positioning System,后处理动态差分全球定位系统)模块测量试验田边界点的地理位置坐标,完成无人机图像的地理配准。在无人机遥感作业结束后,立即统计并记录靠近小区边界约1 m以及各小区中心位置处“1 m双行”区域内的小麦苗数,获取小麦基本苗数地面真值;并使用PPK-GPS模块记录各采样点的地理位置坐标,如图1b中三角形标志所示。
1.2 无人机遥感图像标定
CMOS图像传感器通常基于拜耳模式的滤光阵列将摄入镜头的光谱信息划分至蓝、绿、红3个通道,经光电转换、采样与量化处理,输出具有蓝、绿、红3个波段的数字图像[21]。无人机遥感图像中地物的亮度信息采用数字量化值(DN, Digital Number)进行表达。DN表征CMOS图像传感器中离散化的微小电流值,反映遥感图像中不同地物的亮度,是遥感图像特征提取与分析的基础。DN大小受图像传感器光电响应特性、入射光量等因素影响,并由图像传感器的量化深度决定,见公式(1)。

式中、A、、Δ分别为图像传感器的波段响应参数、入射光量(lx)、镜头孔径与波段宽度(nm)。
本研究的无人机图像传感器采用8字节量化深度,遥感图像各波段的DN范围为0~255。DN作为无量纲数据,本身不具备物理意义。而定量遥感根据地物反射率建立数学模型进而反演地物特性,需要针对遥感图像的DN进一步处理以获取反射率数据。卫星遥感图像通常经过严格的绝对辐射标定,将DN转换为辐射亮度值,并采用辐射传输模型获取地表反射率。地表反射率为反射辐射光量与入射辐射光量的比值,数值介于0与1之间。
与卫星遥感图像的绝对辐射标定模型不同,无人机遥感图像往往采用相对辐射标定技术将遥感图像的DN转换为地表反射率数据[22]。相对辐射标定技术包括不变目标法与黑暗像素法。不变目标法又称参照标定板法,将具有稳定反射特性的参照标定板(不变目标)放置在无人机的镜头视场内,在无人机遥感图像中提取参照标定板的DN,结合其已知的反射率数据,建立相对辐射校正模型,将遥感图像DN转换为反射率数据。黑暗像素法即在遥感图像中确定水库、湖泊等大型水体特征,利用水体在特定光谱范围内反射率低(亮度低)的特性计算程辐射参数,进而获取地表反射率数据。
本研究在无人机的图像传感器视场内放置反射率为2%及83%的参照标定板(图2),参照标定板具有朗伯特性及良好的化学稳定性和热稳定性,在可见光与近红外波段范围内(400~1 700 nm)具备光滑平坦的光谱反射率曲线。

图2 反射率为2%及83%的参照标定板
本研究基于不变目标法,建立参照标定板的DN与标准反射率数据的相对辐射标定模型,见公式(2)。

式中为、、时分别代表无人机遥感图像的蓝色波段、绿色波段及红色波段;Ref_2与Ref_83分别代表反射率为2%及83%的参照标定板的标准反射率;a为无人机遥感图像各波段的增益系数;DN_2与DN_83分别代表反射率为2%及83%的参照标定板在无人机遥感图像各波段上的DN均值;b分别为相对辐射标定模型的偏移量(无量纲)。
1.3 混合像元分解
混合像元分解即将无人机遥感图像中的混合像元分解为不同的组分,并分析各组分的面积比例(丰度,abundance)[23]。目前,混合像元分解模型主要包括线性模型与非线性模型。线性分解模型将混合像元的光谱数据视为端元光谱及其丰度的线性组合,见公式(3)。
式中为混合像元的光谱参数;为混合像元内的端元种类的个数;f为各组分的丰度;Ref为各端元的光谱参数;为误差项。
混合像元的线性分解模型物理含义明确、模型简单,得到了广泛的应用。非线性分解模型包括几何光学模型、概率模型、多项式模型及神经网络模型,在线性分解模型的基础上引入交叉端元表征地物间的多次散射效应,可以较好地刻画复杂场景下光子的多次散射现象。然而,由于非线性分解模型中包含交叉端元,使得模型的共线性风险与误差增大。小麦苗期的遥感图像场景中植被端元与土壤端元的立体结构简单,光子在各端元间发生多次散射的概率偏低。因此,本研究根据混合像元的线性分解理论,建立无人机遥感图像中的混合像元分解模型,将其分解为植被与土壤2种组分,并求解各组分的丰度数据。
在无人机遥感图像中提取端元特征是应用线性模型分解混合像元的首要步骤。本研究根据纯净像元指数,将无人机遥感图像中每个像元的反射率数据作为一个3维向量,对应蓝色波段、绿色波段及红色波段的反射率数值。提取无人机遥感图像中所有像元的反射率数据,构建向量空间。随机变换向量空间的基,生成200组随机向量。将表征各像元反射率数据的3维向量逐一投影至随机向量上,统计各像元的投影处于边缘位置的次数,超过给定阈值(20次)的像元即被判定为图像端元,如图3所示。图中,绿色像元为植被端元,共计8 226个,占比2.23%;红色像元为土壤端元,共计1 046个,占比0.28%,其余像元则为混合像元,占比97.49%。
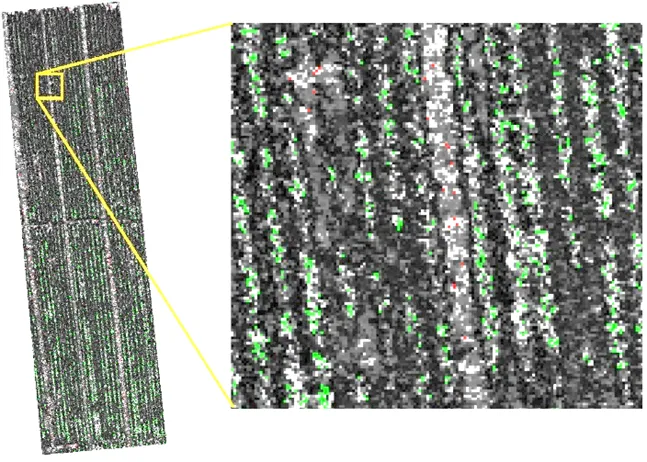
注:红色像元与绿色像元分别为提取的土壤端元与植被端元。
1.4 植被覆盖度估算
植被覆盖度(FVC, Fractional Vegetation Coverage)指植被在地面上的垂直投影面积占总面积的百分比,是反映小麦群体长势的重要指标[24-25]。无人机遥感是高效获取农田FVC的主要技术手段之一,具体可分为植被指数法与像元统计法。植被指数(VI, Vegetation Index)将遥感图像中2个或以上波段的反射率数据进行组合运算,可以增强植被特性与细节。截止目前,超过150余种VI被广泛应用在遥感分析的各个领域,如FVC估算、叶面积指数反演、光合作用强度预测等。
传统基于植被指数估算FVC的方法,仅关注遥感图像中的植被特征与土壤特征而忽略混合像元的影响,无法精准、高效地在大田环境下实现小麦基本苗数的定量反演。近年来,神经网络模型被广泛引入到农业定量遥感研究中,为获取作物表型参数提供了技术支持,提高了特征分类精度与图像分割效率,但在大田环境下定量反演作物群体指标方面仍存在精度差的问题。本团队的先行研究数据显示,小麦茎蘖密度定量反演BP神经网络模型的均方根误差为19株/m2,反演精度有待进一步提升[9]。
因此,本研究基于混合像元的线性分解模型求解植被特征的丰度数据,在此基础上根据像元统计法计算试验田的FVC数据。使用像元统计法计算FVC,指对遥感数据进行分类处理,统计感兴趣区域(RoI, Region of Interest)内被划分为植被特征的像元个数,计算其占区域像元总数的比例,如公式(4)所示。
式中FVC、N、N分别为基于像元统计法获取的FVC值、被划分为植被类别(植被端元与混合像元中的植被组分)的像元数及RoI区域内的像元总数。
为评价基于像元统计法获取FVC值的精度,本研究使用植被指数法分别计算基于可见光波段差分植被指数(VDVI,Visible-band Difference Vegetation Index)、绿红差分指数(GRDI,Green Red Difference Index)、绿红比值指数(GRRI,Green Red Ratio Index)的FVC,并对各指数进行分析。采用公式(5)~(7)分别获取VDVI、GRDI与GRRI,公式(8)~(10)分别计算基于各植被指数的FVC值。
式中Ref、Ref、Ref分别为无人机遥感图像蓝色波段、绿色波段余红色波段的反射率。
FVCVDVI=(VDVI−VDVI)/(VDVI−VDVI)(8)
FVCGRDI=(GRDI−GRDI)/(GRDI−GRDI)(9)
FVCGRRI=(GRRI−GRRI)/(GRRI−GRRI)(10)
式中FVCVDVI、FVCGRDI、FVCGRRI分别为基于VDVI、GRDI、GRRI的植被覆盖度;VDVI、GRDI、GRRI分别为土壤端元的VDVI、GRDI、GRRI值;VDVI、GRDI、GRRI分别为植被端元的VDVI、GRDI、GRRI值。
2 结果与分析
2.1 无人机遥感反射率图像
在无人机遥感图像中,分别选取反射率为2%及83%的参照标定板上的3 000个像元点,统计各波段的DN数据,如表2所示。
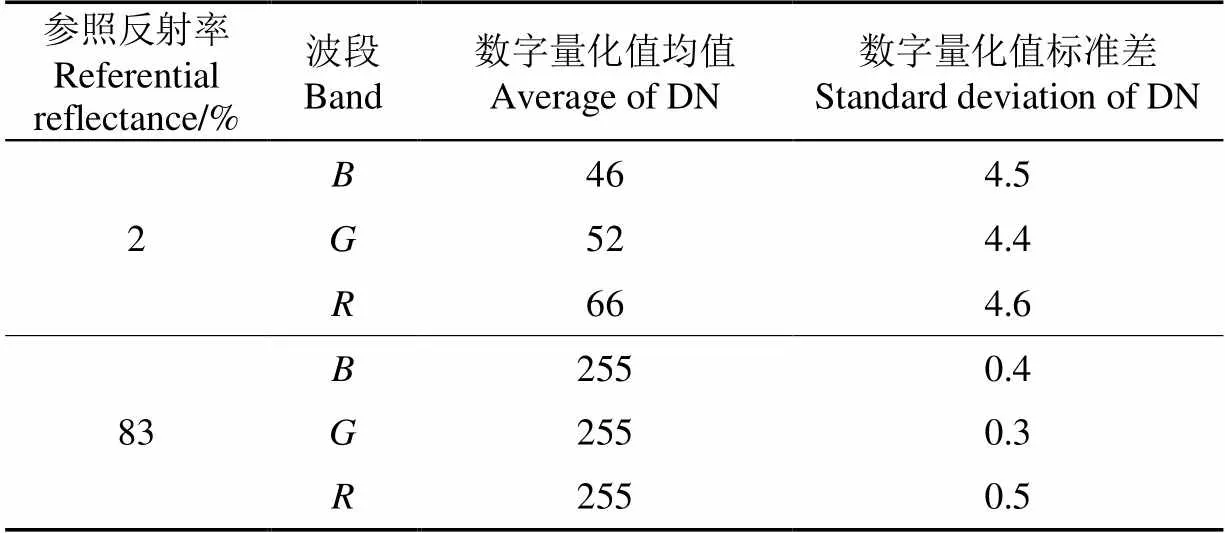
表2 参照标定板数字量化值的统计数据
由表2可知,2%反射率的参照标定板在波段上的DN均值分别为46、52与66,随波长的增大呈增加趋势,各波段DN标准差均小于5;而83%反射率的参照标定板在波段上的DN均值均为255,且标准差小于1。结合表2数据及公式(2),求解无人机遥感图像各波段相对辐射标定模型的增益系数a与偏移量b,建立无人机遥感图像各波段的相对辐射标定模型,如公式(11)~(13)所示,将无人机遥感图像各波段DN转换为地表反射率数据。



式中DN、DN、DN分别为无人机遥感图像蓝色波段、绿色波段及红色波段的DN数据。
2.2 混合像元分解结果
根据植被端元及土壤端元的分布状况,提取各端元在无人机遥感图像各波段上的反射率数据,如图4所示。由图4可知,植被端元在无人机遥感图像各波段上的反射率均远小于土壤端元,前者的反射率在可见光区域内随着波长的增加呈现先增加后减小的单峰特性,在绿色波段达到峰值;与之相对应,土壤端元的反射率数据中随波长的增加呈现平稳增长的趋势。
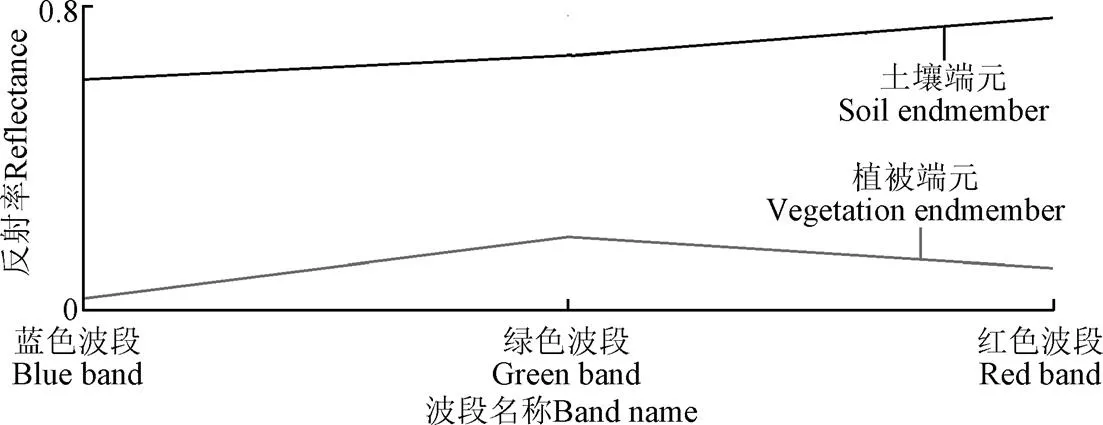
图4 无人机遥感图像端元光谱特性
提取无人机遥感图像混合像元的反射率数据,结合端元光谱数据及公式(3),得无人机遥感图像的混合像元线性分解模型。令各组分的丰度之和为1作为约束条件,使用最小二乘法求解植被组分与土壤组分的丰度,获取试验田的植被特征的丰度模型,如图5所示。在图5中,数值1表征植被端元,数值0表征土壤端元,其余像元则为大于0且小于1的数值,表征混合像元中植被组分的面积占比。

图5 植被丰度模型
2.3 小麦基本苗数定量反演
根据公式(5)~(7),分别获取试验田的VDVI、GRDI、GRRI灰度图像,并根据各端元的位置分布,分别提取其VDVI、GRDI、GRRI值,如表3所示。

表3 植被端元与土壤端元的植被指数统计数据
将表3中各植被指数均值带入公式(8)~(10),计算基于各植被指数的FVC值,获取相应的FVC灰度图像。根据小麦基本苗数地面真值采样点的PPK-GPS坐标,分别在FVC灰度图像中提取以采样点为中心的“1 m双行”区域内的FVC平均值,见表4。其中15组用于建立定量反演模型,3组用作验证模型精度。

表4 小麦基本苗数地面真值与植被覆盖度
注:1.本研究采用后处理动态差分全球定位系统技术获取地面真值样本点的地理坐标,并使用通用横轴墨卡托模型对地理坐标进行投影变换。2. FVCVDVI、FVCGRDI、FVCGRRI、FVC分别为基于可见光波段差分植被指数、绿红差分指数与绿红比值指数及像元统计法获取的植被覆盖度。
Note: 1. In this study, technique of post-processing kinematic global positioning system was used to acquire geographical coordinates of ground truth samples, and Universal Transverse Mercator model(UTM) was used to conduct geographical projection. 2. FVCVDVI, FVCGRDI, FVCGRRI, FVCindicates the FVC (Fractional Vegetation Coverage) calculated by using the vegetation indices of VDVI (Visible-band Difference Vegetation Index), GRDI (Green Red Difference Index), GRRI (Green Red Ratio Index), and pixel counting method, respectively.
与之对应,根据试验田的植被丰度模型(图5)及公式(4),统计上述“1 m双行”区域内植被端元的个数及各混合像元中植被组分的丰度数据,即N,基于像元统计法计算FVC。并由公式(14)获取单位面积内的小麦基本苗数地面真值。
T=/0.2(14)
式中T与T分别为单位面积内的小麦基本苗数地面真值(株/m2)与“1 m双行”区域内的小麦基本苗数(株/m),0.2为小麦条播行距(m)。
利用地面真值数据建立单位面积小麦基本苗数与FVCVDVI、FVCGRDI、FVCGRRI、FVC之间的线性回归模型,如图6所示,各回归模型的决定系数2分别为0.79、0.56、0.47与0.87。根据验证集数据计算各回归模型的均方根误差(RMSE, Root Mean Square Error)分别为6.06、7.04、4.43与1.97株/m2。由上可知:与传统的基于植被指数法获取植被覆盖度相比较,基于混合像元线性分解模型的植被覆盖度与小麦基本苗数的回归模型具有较高的定量反演精度。
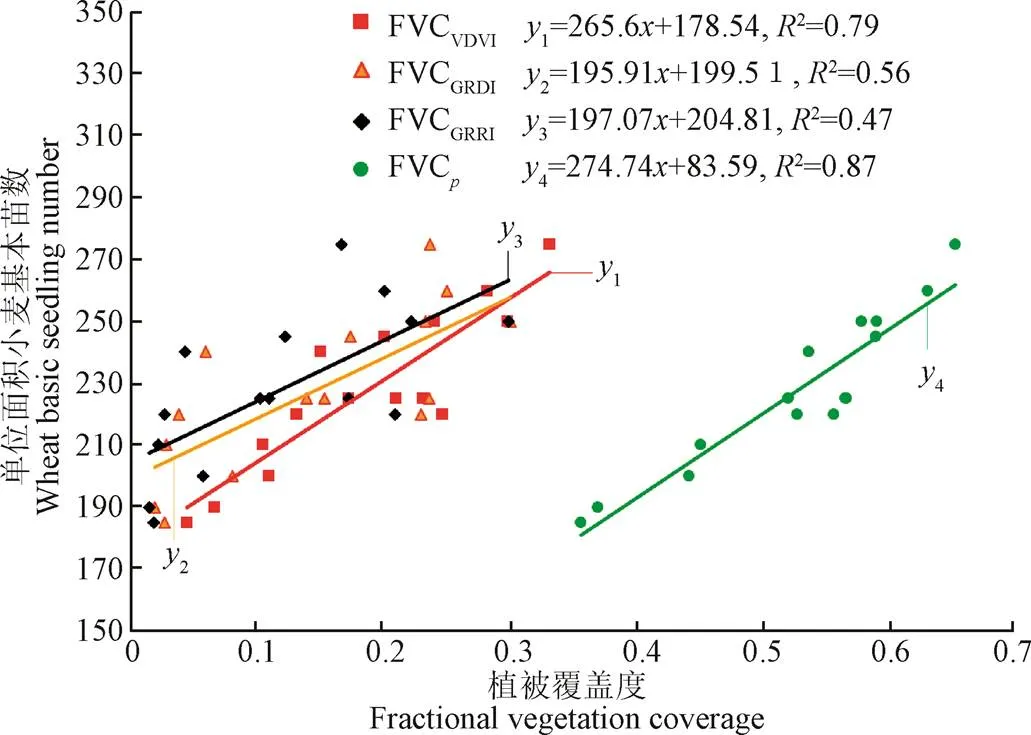
注:FVCVDVI、FVCGRDI、FVCGRRI、FVCp分别为基于可见光波段差分植被指数、绿红差分指数与绿红比值指数及像元统计法获取的植被覆盖度。
根据无人机遥感图像2.5 cm的空间分辨率,应用40×40像元尺度的滑动窗口(1 m×1 m),对FVC灰度图像进行网格化处理。统计各网格内植被端元的个数及混合像元中植被组分的丰度数据,基于像元统计法计算各网格的FVC。利用FVC与小麦基本苗数的线性回归模型(4=274.74+83.59),定量反演试验田的小麦基本苗数,如图7所示。统计该试验田小麦基本苗数的最小密度、最大密度及平均密度分别为83.808、262.416、217.442株/m2。由小麦基本苗数定量反演图可知,小麦基本苗数田块内部的空间差异较为明显,该模型可为精准变量追施氮肥作业提供基础数据。

图7 小麦基本苗数反演结果
3 讨 论
利用航拍无人机获取小麦苗期的遥感图像,为在田块尺度上实现小麦基本苗数定量反演及长势监测提供有效途径。在农业定量遥感研究中,图像空间分辨率至关重要。降低无人机遥感图像的空间分辨率,必然导致遥感图像中除植被端元与土壤端元之外同时包含大量混合像元,影响植被特征的识别精度。另一方面,提高遥感图像的空间分辨率,则将导致像元数量激增,沿小麦叶片边缘分布的大量像元中混入土壤组分,混合像元的数量随之急剧增加,不利于精准提取并分解混合像元。
此外,小麦在苗期群体数量不断增加、叶片重叠度持续升高,进入返青期后逐渐封行,导致无人机遥感图像的混合像元中土壤组分的比例大幅降低,不适合采用混合像元分解模型提取植被组分。因此,本研究基于无人机遥感图像的混合像元分解模型定量反演小麦基本苗数的方法,在小麦三叶期至越冬期前具有较高的精度及适用性。
本研究按照播种量为165 kg/hm2及行距为0.2 m的农艺参数设计试验田,供试品种为“矮抗58”。“1 m双行”地面真值采样区域内的小麦苗数的波动区间为37株至55株,较全面地覆盖了基本苗数稀疏、中等及充分的小麦群体,定量反演模型具有较好的适用性。但是,不同小麦品种之间个体表型参数差异较大,融合不同小麦品种的株高、叶长、叶宽等数据,提高小麦基本苗数定量反演模型的通用性及普适性有待进一步研究。
4 结 论
本研究面向小麦苗情监测提出一种基于无人机图像混合像元分解模型的小麦基本苗数定量反演方法,通过无人机遥感图像的端元光谱参数,建立混合像元的线性分解模型,获取植被丰度数据。在此基础上,基于像元统计法获取植被覆盖度。建立覆盖度与小麦基本苗数地面真值的线性回归模型,与基于传统植被指数法分别利用可见光波段差分植被指数、绿红差分指数、绿红比值指数获取的相应模型进行对比。
结果显示:基于像元统计法及上述3种植被指数的植被覆盖度与小麦基本苗数地面真值的回归模型,决定系数2与均方根误差分别为0.87、0.79、0.56、0.47与1.97、6.06、7.04、4.43株/m2。本研究提出的基于混合像元分解的植被覆盖度对小麦基本苗数具有较高的反演精度。可以为精准减量追施氮肥作业提供基础数据。
[1] 何中虎,夏先春,陈新民,等. 中国小麦育种进展与展望[J]. 作物学报,2011,37(2):202-215.
He Zhonghu, Xia Xianchun, Chen Xinmin, et al. Progress of wheat breeding in China and the future perspective[J]. ACTA Agronomica Sinica, 2011, 37(2): 202-215. (in Chinese with English abstract)
[2] 白岗栓,杜社妮,于健,等. 激光平地改善土壤水盐分布并提高春小麦产量[J]. 农业工程学报,2013,29(8):125-134.
Bai Gangshuan, Du Sheni, Yu Jian, et al. Laser land leveling improve distribution of soil moisture and soil salinity and enhance spring wheat yield[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(8): 125-134. (in Chinese with English abstract)
[3] 李伟. 中国小麦生产的时空演变特征及其影响因素分析[J]. 中国农业资源与区划,2019,40(10):49-57.
Li Wei. Spatiotemporal evolution characteristics and influencing factors of wheat production in China[J]. Chinese Journal of Agricultural Resources and Region Planning, 2019, 40(10): 49-57. (in Chinese with English abstract)
[4] 杨程,李向东,张德奇,等. 小麦产量三要素与产量的通径和灰色关联度分析[J]. 河南农业科学,2016,45(10):19-23.
Yang Cheng, Li Xiangdong, Zhang Deqi, et al. Grey relational analysis and path analysis on wheat yield and its three key factors[J]. Journal of Henan Agricultural Sciences, 2016, 45(10): 19-23. (in Chinese with English abstract)
[5] 张猛,孙红,李民赞,等. 基于4波段作物光谱测量仪的小麦分蘖数预测[J]. 农业机械学报,2016,47(9):341-347.
Zhang Meng, Sun Hong, Li Minzan, et al. Prediction of winter wheat tiller number based on 4-waveband crop monitor with spectral reflectance[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(9): 341-347. (in Chinese with English abstract)
[6] 梅晶晶,周苏玫,徐凤丹,等. 小麦根蘖发育和产量对耕作和追氮方式以及施氮量的响应[J]. 植物营养与肥料学报,2020,26(6):1069-1080.
Mei Jingjing, Zhou Sumei, Xu Fengdan, et al. Response of root and tiller development and yield of wheat to tillage and nitrogen topdressing patterns and nitrogen application rates[J]. Journal of Plant Nutrition and Fertilizers, 2020, 26(6): 1069-1080. (in Chinese with English abstract)
[7] Basso B, Fiorentino C, Cammarano D, et al. Variable rate nitrogen fertilizer response in wheat using remote sensing[J]. Precision Agriculture, 2016, 17(2): 168-182.
[8] 曹倩,贺明荣,代兴龙,等. 密度、氮肥互作对小麦产量及氮素利用效率的影响[J]. 植物营养与肥料学报,2011,17(4):815-822.
Cao Qian, He Mingrong, Dai Xinglong, et al. Effects of density and nitrogen on grain yield and nitrogen use efficiency of winter wheat[J]. Journal of Plant Nutrition and Fertilizers, 2011, 17(4): 815-822. (in Chinese with English abstract)
[9] 杜蒙蒙,Ali Roshanianfard,刘颖超. 可见光波段无人机遥感图像的小麦茎蘖密度定量反演[J]. 光谱学与光谱分析,2021,41(12):3828-3836.
Du Mengmeng, Ali Roshanianfard, Liu Yingchao. Inversion of wheat tiller density based on visible-band images of drone[J]. Spectroscopy and Spectral Analysis, 2021, 41(12): 3828-3836. (in Chinese with English abstract)
[10] Jin X, Liu S, Frederic B, et al. Estimates of plant density of wheat crops at emergence from very low altitude UAV imagery[J]. Remote Sensing of Environment, 2017, 198: 105-114.
[11] 汪沛,罗锡文,周志艳,等. 基于微小型无人机的遥感信息获取关键技术综述[J]. 农业工程学报,2014,30(18):1-12.
Wang Pei, Luo Xiwen, Zhou Zhiyan, et al. Key technology for remote sensing information acquisition based on micro UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(18): 1-12. (in Chinese with English abstract).
[12] Yue J, Yang G, Li C, et al. Estimation of winter wheat above-ground biomass using unmanned aerial vehicle-based snapshot hyperspectral sensor and crop height improved models[J]. Remote Sensing, 2017, 9: 708.
[13] Du M, Noguchi N. Monitoring of wheat growth status and mapping of wheat yield’s within-field spatial variations using color images acquired from UAV-camera system[J]. Remote Sensing, 2017, 9(3): 289.
[14] 张东彦,韩宣宣,林芬芳,等. 基于多源无人机影像特征融合的冬小麦LAI估算[J]. 农业工程学报,2022,38(9):171-179.
Zhang Dongyan, Han Xuanxuan, Lin Fenfang, et al. Estimation of winter wheat leaf area index using multi-source UAV image feature fusion[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(9): 171-179. (in Chinese with English abstract)
[15] 翟志强,陈学庚,邱发松,等. 基于像素块和机器学习的播前棉田地表残膜覆盖率检测[J]. 农业工程学报,2022,38(6):140-147.
Zhai Zhiqiang, Chen Xuegeng, Qiu Fasong, et al. Detecting surface residual film coverage rate in pre-sowing cotton fields using pixel block and machine learning[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(6): 140-147. (in Chinese with English abstract)
[16] Rezzouk F, Gracia R, Kefauver S, et al. Remote sensing techniques and stable isotopes as phenotyping tools to assess wheat yield performance: Effects of growing temperature and vernalization[J]. Plant Science, 2019, 295: 110281.
[17] 吴焕丽,崔可旺,张馨,等. 基于改进K-means图像分割算法的细叶作物覆盖度提取[J]. 农业机械学报,2019,50(1):42-50.
Wu Huanli, Cui Kewang, Zhang Xin, et al. Improving accuracy of fine leaf crop coverage by improved K-means algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(1): 42-50. (in Chinese with English abstract)
[18] 邓尚奇,赵钰,白雪源,等. 基于无人机图像分割的冬小麦叶绿素与叶面积指数反演[J]. 农业工程学报,2022,38(3):136-145.
Deng Shangqi, Zhao Yu, Bai Xueyuan, et al. Inversion of chlorophyll and leaf area index for winter wheat based on UAV image segmentation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(3): 136-145. (in Chinese with English abstract).
[19] 杜颖,蔡义承,谭昌伟,等. 基于超像素分割的田间小麦穗数统计方法[J]. 中国农业科学,2019,52(1):21-33.
Du Ying, Cai Yicheng, Tan Changwei, et al. Field wheat ears counting based on superpixel segmentation method[J]. Scientia Agricultura Sinica, 2019, 52(1): 21-33. (in Chinese with English abstract).
[20] Du M, Noguchi N, Itoh A, et al. Multi-temporal monitoring of wheat growth by using images from satellite and unmanned aerial vehicle[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(5): 1-13.
[21] 陈远,徐之海,冯华君. 一种可用于单色光谱检测的CMOS层叠传感器[J]. 光谱学与光谱分析,2009,29(11):3015-3018.
Chen Yuan, Xu Zhihai, Feng Huajun. A CMOS vertically integrated device for monochromatic spectrum detection[J]. Spectroscopy and Spectral Analysis, 2009, 29(11): 3015-3018. (in Chinese with English abstract)
[22] 吴俊,李娜,岳春宇,等. 微纳遥感相机在轨光轴指向标定方法[J]. 光子学报,2019,48(9):124-132.
Wu Jun, Li Na, Yue Chunyu, et al. Method for in-orbit optical axis pointing calibration of micro-nano remote sensing camera[J]. Acta Photonica Sinica, 2019, 48(9): 124-132. (in Chinese with English abstract)
[23] 于丰华,赵丹,郭忠辉,等. 水稻分蘖期无人机高光谱影像混合像元特征分析与分解[J]. 光谱学与光谱分析,2022,42(3):947-953.
Yu Fenghua, Zhao Dan, Guo Zhonghui, et al. Characteristic analysis and decomposition of mixed pixels from UAV hyperspectral images in rice tillering stage[J]. Spectroscopy and Spectral Analysis, 2022, 42(3): 947-953. (in Chinese with English abstract).
[24] 刘涛,张寰,王志业,等. 利用无人机多光谱估算小麦叶面积指数和叶绿素含量[J]. 农业工程学报,2021,37(19):65-72.
Liu Tao, Zhang Huan, Wang Zhiye, et al. Estimation of the leaf area index and chlorophyll content of wheat using UAV multi-spectrum images[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(19): 65-72. (in Chinese with English abstract)
[25] 李恒凯,雷军,杨柳. 基于Landsat影像的离子稀土矿区植被覆盖度提取及景观格局分析[J]. 农业工程学报,2016,32(10):267-276.
Li Hengkai, Lei Jun, Yang Liu. Extraction of vegetation coverage and analysis of landscape pattern in rare earth mining area based on Landsat image[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(10): 267-276. (in Chinese with English abstract)
Improving the accuracy of wheat basic seedling number inversion based on the mixed pixel decomposition model for remote sensing image of drone
Du Mengmeng1,2, Li Minzan3, Ji Jiangtao1, Ali Roshanianfard4
(1.,,471003,; 2.,471003,; 3.,,,100083,; 4.,,566199,)
Wheat basic seedling number is one of the most important sources of the total number of wheat ears. In turn, the leading factor can also dominate the wheat yield per unit area. It is an essential prerequisite for the timely and accurate acquisition of the within-field spatial difference information of the wheat basic seedling number. The variable-rate topdressing of nitrogen fertilizer can then be implemented in the manner of precision agriculture. The population density of wheat tillers can often be regulated to realize the fertilizer reduction with a better yield. Unmanned Aerial Vehicle (UAV) remote sensing imagery can be efficiently obtained at the field level in recent years. However, the vegetation and background features can be only processed without considering the influence of mixed pixels of the imagery in the traditional agricultural UAV remote sensing applications. The accuracy and reliability of wheat basic seedling number inversion cannot fully meet the large-scale production in smart agriculture. In this study, the quantitative inversion accuracy of wheat basic seedling numbers was improved using the mixed pixel decomposition model of UAV remote sensing imagery. Firstly, the UAV remote sensing imagery was acquired with a spatial resolution of about 2.5 cm using DJI Mini drone. The relative radiometric calibration was then completed using the invariant target method. Furthermore, the endmembers of vegetation and soil, as well as the mixed pixels were extracted from the reflectance image, which accounted for 2.23%, 0.28%, and 97.49% of the pixels, respectively. The spectral signatures were acquired for the endmembers of vegetation and soil using the reflectance values. Consequently, the decomposition model was established using mixed pixels of UAV remote-sensing images. The linear decomposition was used to divide each mixed pixel into 2 components of vegetation and soil. The abundance data was acquired for each component. The vegetation abundance model was used to calculate the Fractional Vegetation Coverage (FVC) of the experimental field. The proportions of vegetation endmember and abundance were then evaluated over the total area of “1m and 2 rows”. Finally, a linear regression model was established between the FVC and the ground truth data of 15 sets of wheat basic seedling numbers. The determination coefficient2was 0.87. Besides, the regression model was verified using 3 other ground truth data of wheat basic seedling numbers. The verification results show that the Root Mean Square Error (RMSE) was 1.97 seedlings/m2. The higher inversing accuracy was achieved in this case, compared with the average wheat basic seedling number of 217.442 seedlings/m2for the wheat field. A comparative experiment was performed on the FVC thematic maps. The traditional vegetation index method was used, including the Visible-band Difference Vegetation Index (VDVI), Green Red Difference Index (GRDI), and Green Red Ratio Index (GRRI). The linear regression models were then established between each FVC of VDVI, GRDI, GRRI, and ground truth data of wheat basic seedling number. The determination coefficient2and RMSE were calculated as 0.79, 0.56, 0.47, and 6.06, 7.04 and 4.43 seedlings/m2, respectively. Therefore, better performance was achieved in the quantitative inversion model of the wheat basic seedling number using the mixed pixels decomposition of UAV remote sensing images. The findings can provide data support for the precise variable topdressing of nitrogen fertilizer at the tillering stage of wheat.
drone; model; inversion; agricultural remote sensing; remote sensing image of drone; mixed pixel; wheat basic seedling number
10.11975/j.issn.1002-6819.2022.17.015
S237
A
1002-6819(2022)-17-0142-08
杜蒙蒙,李民赞,姬江涛,等. 基于无人机图像混合像元分解模型提高小麦基本苗数的反演精度[J]. 农业工程学报,2022,38(17):142-149.doi:10.11975/j.issn.1002-6819.2022.17.015 http://www.tcsae.org
Du Mengmeng, Li Minzan, Ji Jiangtao, et al. Improving the accuracy of wheat basic seedling number inversion based on the mixed pixel decomposition model for remote sensing image of drone[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2022, 38(17): 142-149. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2022.17.015 http://www.tcsae.org
2022-07-11
2022-08-26
国家重点研发计划项目(2019YFE0125500)
杜蒙蒙,博士,讲师,研究方向:农业定量遥感。Email:dualmon.du@haust.edu.cn
猜你喜欢
海洋通报(2022年4期)2022-10-10
——缺陷度的算法研究
条码与信息系统(2022年3期)2022-07-05
航天返回与遥感(2022年2期)2022-05-12
光谱学与光谱分析(2022年4期)2022-04-06
汽车文摘(2018年2期)2018-11-27
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
电子制作(2017年8期)2017-06-05
农村农业农民·B版(2015年8期)2016-01-14
浙江农业科学(2013年9期)2013-09-11