三维巷道拼接建模关键技术研究与实现
2023-01-15 08:12彭少坤刘良亮
北京测绘 2022年11期
彭少坤 刘良亮 张 璇 向 宇
(1. 湖北省发展规划研究院有限公司, 湖北 武汉 430074; 2. 宁夏遥感测绘勘查院(宁夏遥感中心), 宁夏 银川 750021)
0 引言
随着信息化技术的不断发展,空间地理信息越来越受到人们的重视,其在三维场景构建、数字孪生等领域的应用也越来越多。近年来随着三维激光扫描技术的发展,为矿山巷道三维建模提供了便利,石信肖[1]等利用三维激光扫描技术,利用某煤矿数据进行建模,结果表明三维激光扫描技术在巷道建模中是可行的,但是由于建模软件等限制,存在模型拟合有较多孔洞的问题。对于全自动化的巷道建模,宫文博[2]提出加载过渡断面法,魏占营等[3]提出利用巷道数据的弧段拓扑结构,将巷道分成简单巷道和复杂巷道,再针对这两种不同巷道单独建模,最终结果显示两种方法均可实现巷道建模,但是也存在一些不合理现象,如所有数据均处于同一平面且平行,如果不处于同一平面或不平行则拼接困难。江记洲等[4]提出了一种基于点云坐标投影变换的三维建模方法,根据矿井巷道的空间几何特征,采用柱面投影法将三维点云转化为二维的密度图像[5],然后基于规则算法进行三角剖分,同时保存二维、三维点云和三角网的拓扑关系,最后重建三维巷道模型,但该方法中需要频繁的人工干预。Yi C等[6]引入分层建模的概念,应用层次分割和元素提取方式,自动导出三维盾构隧道测量数据,根据点云与图像的对应关系,提取点云内的分段信息,建立相应的三维模型,得到了较为精确的隧道结构。但是该方法对数据要求较高,需要同时采集高精度的点云与相应的图像信息。张珂等[7]基于当前以巷道端点走势确定巷道走势的不足,研究了利用巷道拓扑关系进行测量采点然后基于加载断面法进行三维巷道建模的方式,最后在平顶山煤业集团六矿进行了实际应用。结果表明,该方法可更加真实地反映巷道实际情况,但是也存在过于依赖Auto CAD交互采点的缺陷。
针对前人研究成果及问题,本文以巷道单体建模及拼接实现为核心,分别论述了不同巷道数据模型、巷道数据组织及拓扑结构、巷道建模及拼接技术等,最后采用交互式图形程序(OpenSceneGraph,OSG)实现了整个巷道的建模与显示。
1 数据与研究方法
1.1 数据来源
随着测距技术的发展,导线测量精度已可比拟三角网测量精度[8]。本文研究数据主要来源于某煤矿导线测量数据。
1.2 巷道三维模型的选择
通过对巷道模型的分析,目前,有许多方法可用于三维面建模,每种方法各有优劣,对于当前较主流的三维面模型建模方法分析如下。
多层数字高程模型(digital elevation model,DEM):该模型以有序数组的形式表征特性,主要用于岩层建模、地质建模等领域,主要是将建模对象分为一层层的DEM加以表示,因此在巷道模型中适用性不佳。
边界表示(boundary representation,B-rep)建模:B-rep边界表示模型特点是会详细记录各实体的连接关系及几何信息,对后期的几何运算将非常有利,但是对巷道类似的不规则几何形状其表达很不方便且效率不高。
线框模型:线框模型以顶点、边线表示三维模型,对于复杂对象可较好地模拟各种变化曲线及轮廓,且易于维护操作。
通过对各种模型的分析,本文选择线框模型对三维巷道进行建模,线框模型具有适应性好、易维护操作等特点,首先可先建模实现三维巷道轮廓,然后线框表面以不规则三角网填充。
1.3 巷道拓扑结构
在巷道拓扑结构中,巷道拓扑结构与城市管网结构类似,可将巷道以中心线为准抽象为巷道线,巷道线间相互连接形成巷道拓扑网络,巷道拓扑网络还包括巷道结点、节点、弧段等[9-10]。
(1)结点:某条巷道的起点及终点。
(2)节点:某一巷道中抛开结点之外其他的点,某条巷道上的节点也能作为其他巷道的结点。
(3)弧段:即两个相邻节点之间的巷道段,弧段同时包含空间和属性信息,是组成整个巷道网络的重要组成部分。
2 巷道建模及拼接相关关键技术实现
2.1 巷道网络建模
巷道建模首先需要对巷道数据进行预处理,获取巷道网络,然后对巷道网络进行建模。在巷道中每个巷道都具有中心线,中心线是进行巷道漫游的基础,巷道模型以每段巷道为基础,建立巷道界面模型,然后以此构造线框模型[11]。
在实际巷道三维建模中,导线测量数据具有方向性,因此实际构建的巷道模型也将是有向图。模型中的每一段都将抽象为有向图的节点,如果巷道区分方向,巷道模型某段的结点将加以区别,如果不区分方向,则两端点同等对待[12]。实际巷道网建模步骤描述如下:
(1)读取巷道及巷道中心线数据。
(2)建立相应巷道中心线索引。
(3)将中心线索引上的点与建立的巷道网络有向图进行对比,如果相交则将这两个点赋予相同索引并存入点集。
(4)以巷道中心线索引为基础获取弧段端点并以任意一端点作为结点添加到巷道网有向图。
(5)依次遍历本巷道上的节点,重复步骤(3)、(4)至所有节点均遍历完毕。
(6)依次遍历巷道网中的下一条巷道,重复步骤(2)、(3)、(4)至全部巷道均遍历完毕。
2.2 单体巷道建立
2.2.1巷道截面建模
本文中选择模型断面构建巷道界面模型,根据实际情况,预设模型主要包括梯形、圆筒形、矩形、拱形、三心拱共五种。
对巷道截面点而言,其只有二维的平面信息(xn,yn),为了进一步建立截面模型,需要将二维平面点转为三维点,然后根据实际节点位置与巷道有向图将截面进行相应平移、缩放、旋转。以拱形数据为例,具体建模过程如下[3,14]。
(1)截面三维构建:直接从数据库获取的数据是二维的平面点(xn,yn),为了顺利地进行三维空间变换,首先需要将二维点三维化,即将点(xn,yn)转为(xn,yn,0),所有三维点均位于XOY平面,且截面的法向量与Z轴平行。
(2)截面旋转、平移:在上一步中所建立的截面,中心点位于(0,0,0)处,现实中最终用于建模的数据是巷道两个端点上的截面而且必须确保截面的单位法向量与巷道段的相等,第一步先创建所在巷道的端点与截面中心点之间的平移向量并将所建立的截面移动到巷道结点,第二步通过巷道法向量与截面法向量建立旋转矩阵并将截面上所有的特征点进行旋转,得到旋转到指定位置后的截面。
(3)交叉点截面旋转与巷道缩放:对于巷道交叉点截面旋转需要构造不同的旋转矩阵,即巷道单位法向量改为相交两巷道的垂直法向量。为了确保巷道模型的真实性,避免出现巷道过窄或过宽情况,需要对变换后的巷道进行适当的缩放。
2.2.2巷道网面建模
为了实现巷道三维模型的真三维显示需要对以上截面模型构造基于三角索引的不规则三角网。构建三角网主要步骤如下。
(1)点集存储:为了方便后期建立三角顶点索引,本研究对巷道上下游截面的特征点采取逆时针存储。
(2)建立三角顶点索引:在OSG中,所有的面均区分正反,因此在构建三角顶点索引时必须保证顶点顺序相同,如图1所示,所建立的三角顶点索引为(A′,B′,B),(B′,C,B),(B′,C′,C)等。
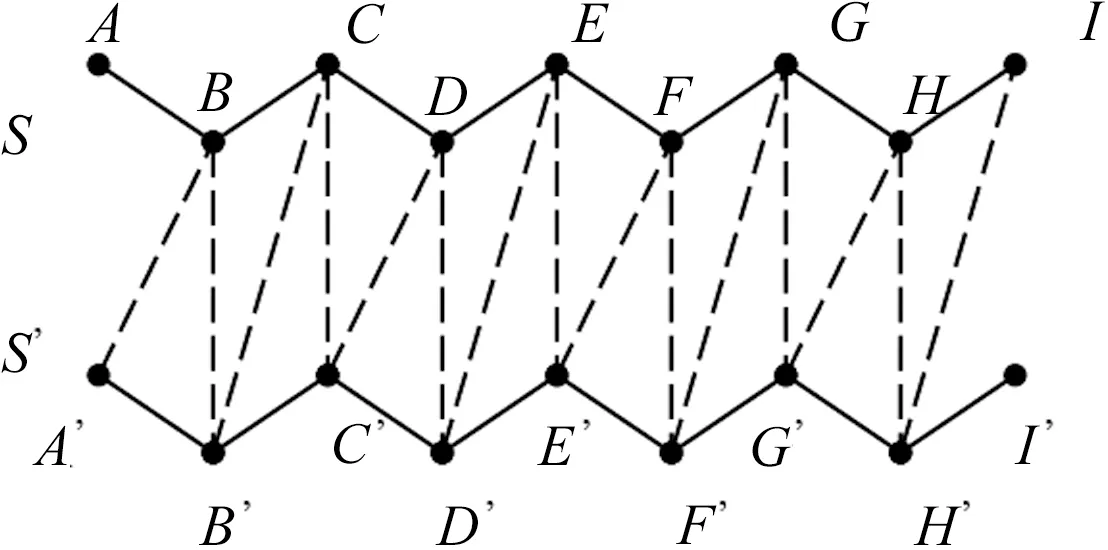
图1 三角形点索引构建
(3)建立三角网面模型:将所建立的点集与三角顶点索引集导入编写好的程序中,通过程序遍历与绘制三角形,最终建立三角网面模型。
2.3 巷道拼接算法实现
由于井下巷道相交情况复杂导致不同巷道相交时会产生锯齿或裂缝等情况,本文首先将巷道单独进行建模,然后在巷道拼接建模时预留一定间隙,采用曲线/面圆拟合或插值技术来达到平滑拼接,实际操作中巷道拼接建模首先选用贝塞尔曲线拟合[15]。以三岔口为例,具体拼接模型见图2。
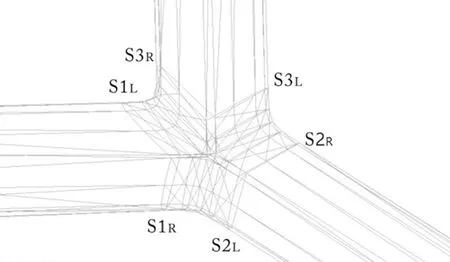
图2 巷道拼接模型
(1)遍历巷道网络中的各个节点以及与某一节点连接的所有巷道段。
(2)根据连接点巷道向量对连接巷道节点反方向排序S1、S2、S3并将连接点巷道段截面上的特征点分为左右两部分S1L、S1R、S2L、S2R、S3L、S3R。
(3)选取(S1R,S2L),(S2R,S3L),(S3R,S1L)上相应的特征点构造实际所需的贝塞尔曲线并基于曲线上对应的特征点以三角索引的不规则三角网创建曲面模型,以邦底以及邦顶中心线上的贝塞尔曲线特征点为三角网连接点进行三角构网并做模型拼接。
(4)继续遍历下一节点,重复以上步骤至遍历完所有节点。
最终部分拼接效果如图3所示。

(a)任意角度梯形和拱形巷道拼接
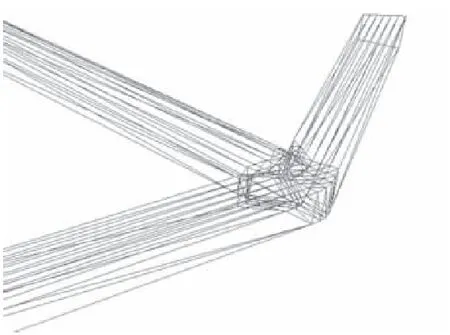
(b)任意角度梯形、矩形和拱形三岔口巷道拼接
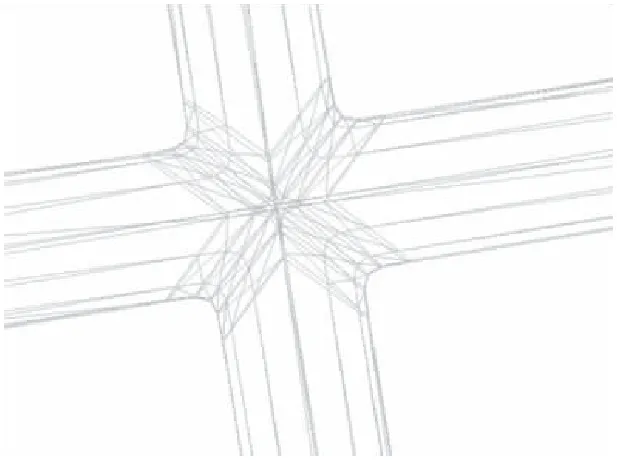
(c)任意角四岔口巷道圆滑拼接
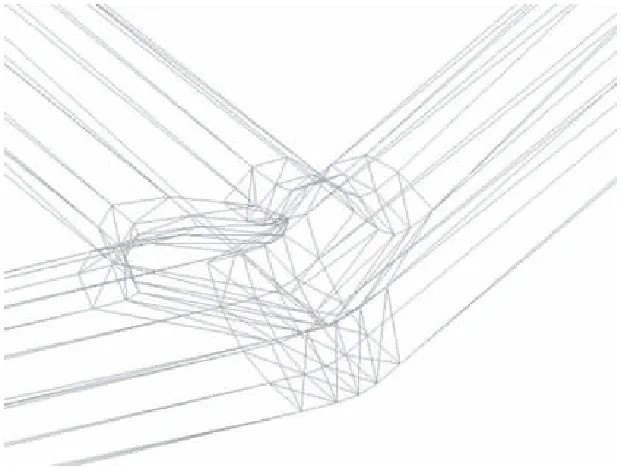
(d)倾斜井与水平巷道圆滑拼接图3 三维巷道拼接实现
3 井下三维巷道可视化的实现
本研究中采用Microsoft Visual Studio作为开发工具,利用OSG三维引擎实现三维渲染,最终部分巷道三维仿真及漫游效果如图4所示。
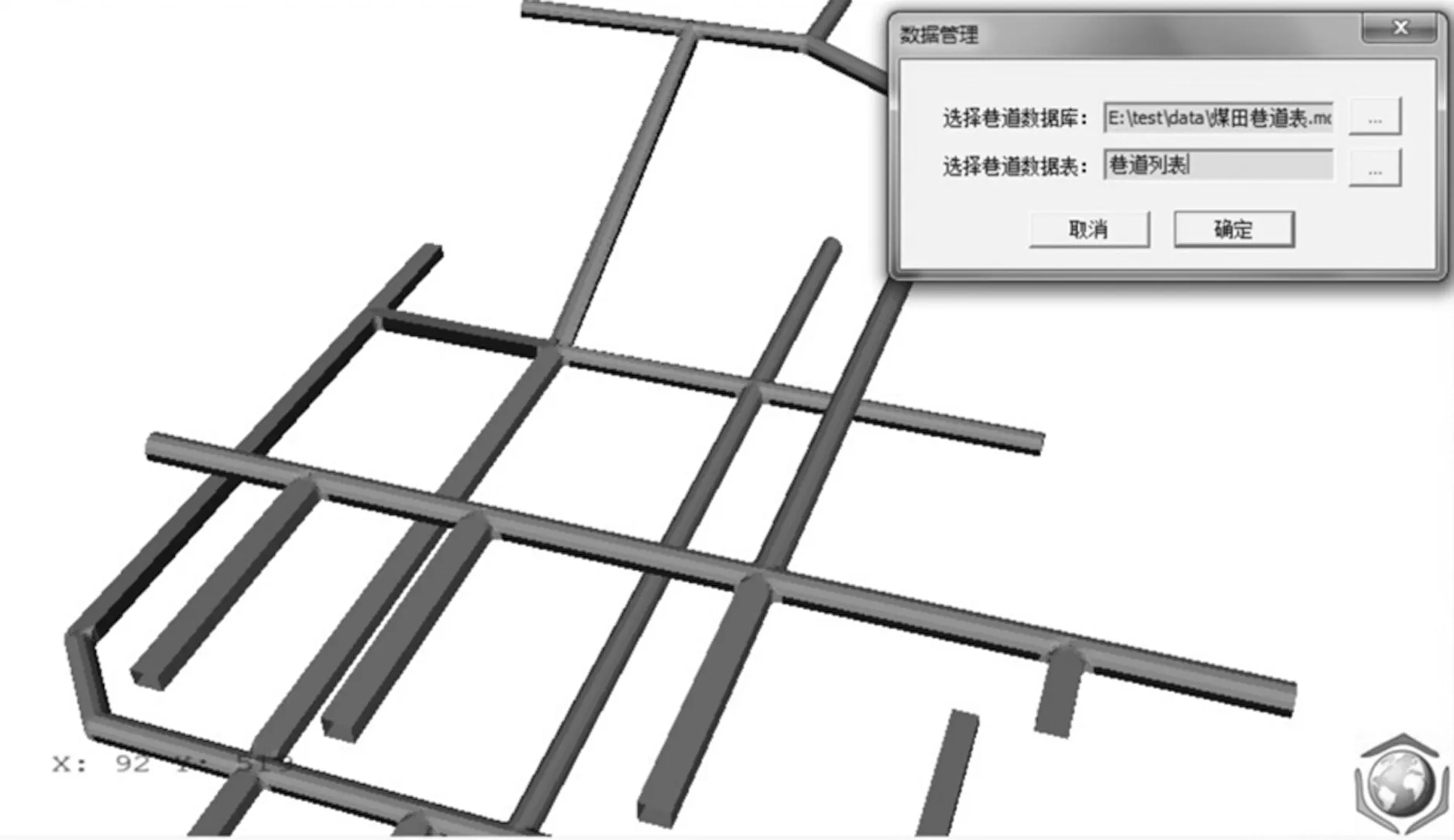
图4 三维巷道建模系统原型
4 结束语
本文首先对国内外三维巷道建模、拼接等现状进行了深入分析,然后在参考前人研究成果的基础上对相关算法及三维显示技术进行了深入研究,最后基于OSG引擎对三维巷道建模及系统进行了实现,主要研究成果如下:
(1)针对不同巷道研究了包括巷道断面加载、巷道网络建模、巷道段建模等建模方法并最终进行了实现。
(2)通过数学方法解决并实现了巷道平滑与无缝拼接问题。
(3)利用面向对象的编程语言结合OSG对井下三维巷道系统进行了三维可视化实现。
本次研究仍存在一些问题需要进一步研究讨论:
(1)为构建更加贴近实际、高效显示的三维模型巷道数据结构需进一步优化。
(2)加强巷道拓扑关系研究,将巷道组织更细致。
(3)随着数据量的增加,需对巷道拼接曲面生成算法进行深入研究,以期提高显示效果及效率。
猜你喜欢
水电站机电技术(2022年4期)2022-04-18
数学大王·趣味逻辑(2020年4期)2020-04-19
软件导刊(2020年11期)2020-01-05
物理教师(2019年10期)2019-12-13
教学考试(高考物理)(2019年2期)2019-04-24
智能计算机与应用(2017年2期)2017-05-04
中外医疗(2015年5期)2016-01-04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
科学时代·上半月(2013年7期)2013-07-29
卷宗(2013年2期)2013-05-14