基于免像控机载LiDAR点云融合技术的高程精度
2023-01-15 08:12陈安平李红伟
北京测绘 2022年11期
陈安平 李红伟
(1. 广东省地质测绘院, 广东 广州 510800; 2. 华南农业大学 资源环境学院, 广东 广州 510640)
0 引言
传统低空航空摄影测量需要技术人员在测区布测一定数量且分布均匀的像控点[1],像控点的布测需要投入一定的外业人员,消耗大量的生产成本和时间成本,且内业数据处理烦琐,生产周期长[2-3]。近年来,随着激光雷达(light detection and ranging,LiDAR)设备小型化和动态后处理差分技术(post processing kinetic,PPK)[4-6]的逐步成熟,免像控的机载LiDAR测量技术发展迅速,其应用也逐步在各领域得到广泛推广[7-10]。免像控机载LiDAR技术综合了激光LiDAR测量技术、全球导航卫星系统(global navigation satellite system,GNSS)/惯性测量单元(inertial measurement unit,IMU)技术和动态后处理差分技术(PPK),它是非接触式主动测量[11],具有全天候作业、扫描速度快、实时性强、精度高、主动性强、全数字特征等特点,可以获取精度更高的POS数据。相比传统低空航空摄影测量,免像控机载LiDAR技术最大限度地减少了内业对空三加密人员的依赖[3],提高了工作效率,缩短了成果的制作周期。
1 激光LiDAR系统的组成及工作原理
1.1 激光LiDAR系统的组成
激光LiDAR测量系统通常由激光扫描仪、定位定姿系统(position and orientation system,POS)[12]、相机系统和搭载激光LiDAR的平台载体等四部分组成[13]。激光扫描仪利用激光测距的原理,记录被测物体表面大量密集点的三维坐标、反射率等信息,由此快速复建出被测目标的三维模型等各种图件数据;POS系统(GNSS/IMU)用于获取设备在每一瞬间的空间位置与姿态以及为整个系统提供精确的时间基准[14];相机系统用于获取对应地面的彩色数码影像,与激光点云数据结合可以提供更为丰富的空间信息;载体主要是作为激光雷达的搭载平台。
1.2 工作原理
POS辅助空中三角测量是集成差分全球卫星导航系统(differential GNSS,DGNSS)技术和惯性导航系统(inertial navigation system,INS)技术于一体,可以获取移动物体的空间位置和三轴姿态信息,主要包括GNSS信号接收机和IMU两部分[15]。将POS系统和航摄仪集成在一起,在已知GNSS天线相位中心、IMU及航摄仪三者之间空间关系的前提下,可直接对POS系统获取的GNSS天线相位中心的空间坐标(X、Y、Z)及IMU系统获取的侧滚角、俯仰角、航偏角进行数据处理,获取航空影像曝光瞬间的摄站中心三维空间坐标(XS、YS、ZS)及其航摄仪单个姿态角(φ、ω、K),从而实现无地面控制条件下直接恢复航空摄影的成像过程[16]。
全球定位系统(global positioning system,GPS)辅助航空摄影如图1所示。机载POS系统的GNSS天线相位中心A和航摄仪投影中心S的相对位置关系始终保持不变,在航空摄影过程中,点A和点S是一个固定的距离,即点A在像空间辅助坐标系S-UVW中的坐标(μ、ν、ω)是常数。假设点A和S在大地坐标系中的坐标分别为(XA、YA、ZA)和(XS、YS、ZS),则满足式(1),表示如下:
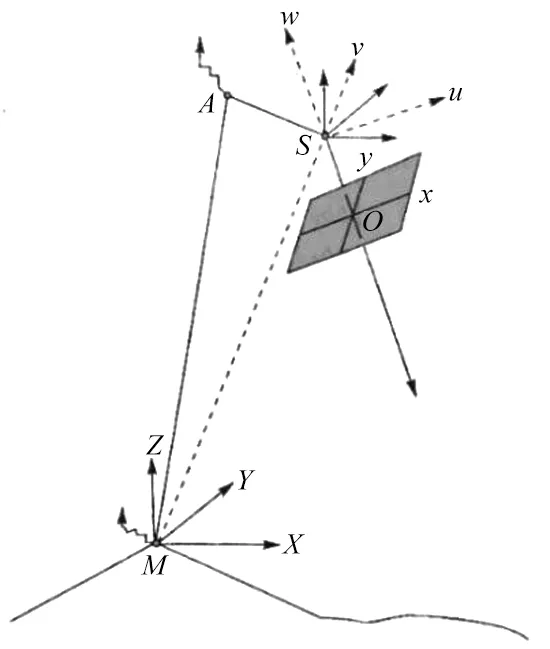
图1 GPS辅助航空摄影示意图
(1)
式(1)是理论公式,具体应用需根据实际情况采用特定模型进行误差改正。从式(1)可以看出,机载GNSS天线相位中心的空间位置与航摄像片的3个姿态角(φ、ω、K)相关。解算投影中心的空间位置必定需要有航摄仪的3个姿态角(φ、ω、K),而POS系统中的IMU主要是用来获取航摄仪3个姿态角(φ、ω、K)信息的。
IMU获取的是惯导系统的侧滚角(φ)、俯仰角(ω)和航偏角(K)。由于系统集成时IMU三轴陀螺坐标系和航摄仪像空间辅助坐标系之间总存在角度偏差(Δφ、Δω、ΔK),因此,航摄像片的姿态参数需要通过转角变换计算得到。航摄像片的3个姿态角所构成的正交变换矩阵R满足式(2)的关系。
(2)
在测算出航摄仪的3个姿态参数后,根据式(1)即可解算出摄站的空间位置信息,从而得到航摄像片的6个外方位元素。将外方位元素引入到解析空中三角测量进行区域网联合平差计算,通过地面上的一个基准点,便可获得相当精度的地面加密点坐标[16]。
2 案例分析
2.1 试验区概况
试验区域为带状图形,带状图长约2.4 km,宽约0.30 km,试验区域内有一道路呈西北-东南走向,道路宽约30 m,试验区内测得最高点(S1)高程为73 m,最低点(S24)高程为57 m,高差约为16 m。区域内用几何水准测量的方法施测了37个控制点的正常高,为方便高程转换求取拟合参数使用,上述37个水准点也采用GNSS的方法测取了大地高。试验区点云略图及水准点位分布如图2所示。

图2 试验区点云略图及水准点位分布
2.2 方案设计
结合试验区的地形概况及相关规范的要求,兼顾数据获取的效率与精度,合理规划航线,设置项目飞行和LiDAR参数如下:相对航高为110 m,飞行速度7 m/s,激光脉冲发射频率为380 kHz,扫描转速90 rps,航向重叠率为80%,旁向重叠率为65%,点云旁向重叠率为50%,激光点密度140.74,航向点间距0.078 m,旁向点间距0.089 m,影像地面采样距离(ground sampling distance, GSD)为0.021 m。同时,在试验区的区域范围内使用静态方式架设GNSS基站一个。
为了综合分析免像控模型下的点云精度,本文共精心选配了四种方案(表1)。方案1未利用测区布设的控制点,通过在地面架设基站,采用动态后处理差分技术解算POS和点云,获取正常高,试验区内施测的37个控制点的正常高作为检查点。方案2的设计思路是在试验区的东、西两侧分别选取了2个控制点求取高程拟合参数,再通过求取的高程拟合参数对点云进行大地高到正常高的转换,最后利用剩余的33个控制点的正常高作为检查点来进行数据分析;方案3的设计思路是沿着公路均匀选取8个控制点求取高程拟合参数,再通过求取的高程拟合参数对点云进行大地高到正常高的转换,最后利用剩余的29个控制点的正常高作为检查点来进行数据分析;方案4的思路是在试验区四周均匀选取12个控制点求取高程拟合参数,将一次点云高程拟合残差空间分布变化异常的控制点作为二次点云高程拟合点的选取依据,进行点云高程拟合参数的求解,降低不合理选点可能带来的结果影响。
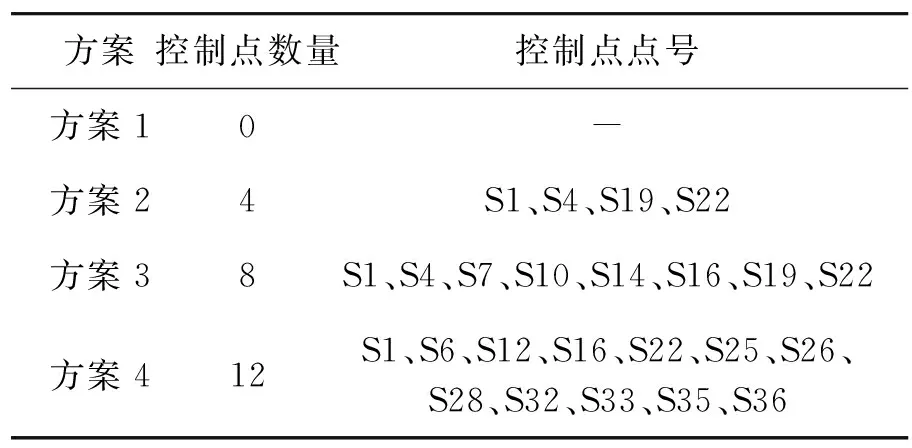
表1 四种组合方案
2.3 结果与分析
试验精度统计结果如表2所示。从表2可以看出,方案1采用动态后处理差分技术获取的点云与几何水准测量的正常高进行比对,高程中误差为4.4 cm,最大值为6.8 cm,点云的高程精度已达到相关规范关于图根控制测量的精度要求,满足数字测图关于高程注记点的精度要求(1∶500、1∶1000、1∶2000 DLG高程注记点相对于邻近图根点的高程中误差不应大于0.15 m)[17]。从表2的方案2、方案3可以看出,点云的高程精度并无大幅度的提高,当点云成果的高程精度达到一定程度后,单纯依靠传统的高程拟合方法,通过增加控制点的数量来大幅度提高点云精度已经不可行。方案4点云高程中误差为1.2 cm,对比方案1提高了3.2 cm,整体拟合精度接近毫米级,说明将能反映试验区高程异常的点纳入二次拟合参数进行求解,点云的高程精度得到了显著的提高。
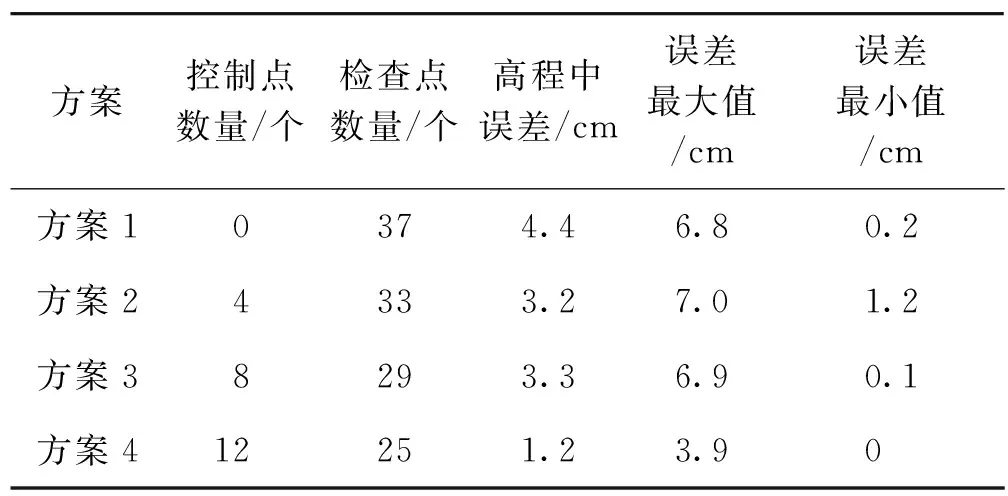
表2 精度统计表
4种方案精度比对如图3所示,检查点高程误差分布如表3所示。结合图3和表3可以发现,和其他几个方案相比,方案1的高程精度最低,高程误差曲线有明显的起伏,且86.5%点高程误差均分布在2 cm以上,但高程误差最大值又不超过7 cm。和其他几个方案相比,说明免像控机载LiDAR获取的点云高程精度虽然最低,但是通过合理设置飞行方案,获取的点云高程仍可以满足日常工程领域的需求;与方案1相比,方案2、方案3的高程误差分布在2 cm以内的分别占比为33.3%和37.9%,点云高程拟合精度有所提高,说明通过合理选择控制点的分布和增加控制点的数量进行高程拟合是可以提高点云高程精度的,但在4种方案中却不是最优的结果;方案4的高程误差曲线波动较小,比较稳定,高程误差分布在2 cm以内的占比为88.0%,除个别点位高程误差较大外,绝大部分点高程误差在1 cm以内,和其他3种方案相比,方案4整体精度最高,误差值最小。
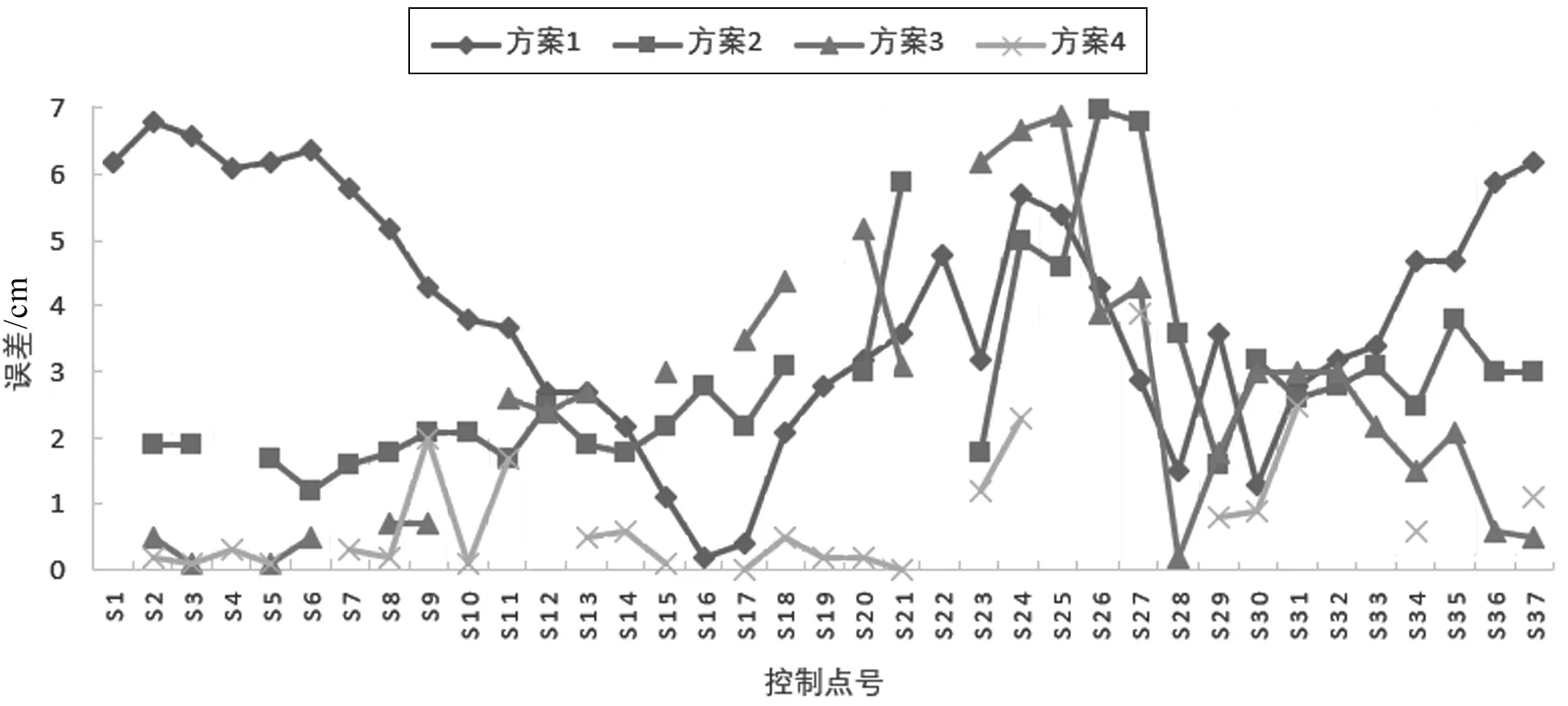
图3 四种方案精度比对
结合表2、表3可以看出,方案1的高程误差超过80%分布在2 cm以上,但误差的最大值也仅为6.8 cm,完全符合和满足相关工程测量的高程精度要求。方案4的高程精度提高了3.6倍,从图3可以发现,方案4的高程误差主要分布在0~1 cm区间,说明对一次点云高程拟合残差空间分布变化异常的控制点,纳入二次点云高程拟合参数求解,可以大幅度地提升点云的高程精度,处理后的点云数据在理论上是可以达到毫米级的高程精度。方案2、方案3对比方案1,5~10 cm区间点的数量减少了2倍多,0~2 cm区间点的数量增加了2倍多,说明通过合理配置选择控制点可以提高点云的高程精度。从表2、表3可以看出,方案2、方案3的中误差接近,误差分布区间也大致相同,说明高程精度提高到一定程度后,仅仅通过增加控制点的数量来提高点云精度的方案是不可行的。

表3 检查点高程误差分布范围
3 结束语
本文通过提供四种不同方案进行对比试验,对免像控机载LiDAR点云融合技术下的高程精度进行量化分析,得出以下结论:
(1)在充分考虑数据获取的精度,合理设置项目飞行参数的前提下,采用免像控的机载LiDAR点云融合技术获取的点云高程精度不仅可以满足外业数字测图的要求,而且还可以满足地质灾害、山体滑坡、土方量计算等工程领域的应用,但精密高程测量除外。
(2)当点云的高程精度达到一定程度后,单纯依靠增加控制点数量的传统高程拟合方法,已经无法大幅度提高其高程精度。
(3)对一次点云高程拟合残差空间分布变化异常的控制点,纳入二次点云高程拟合参数求解,可以大幅度地提升点云的高程精度,处理后的点云数据高程精度在理论上是可以达到毫米级的。
(4)点云数据成果的高程精度受多种因素的影响,譬如航高、激光测距误差、扫描角、IMU姿态角、安置角等。因此,按照项目精度的要求对飞行参数进行合理配置是必不可少的前提条件。
上述试验数据成果是在地形比较平坦的情况下得到的结论,当地形数据高差起伏较大时,还有待进一步的试验分析。另外可尝试根据拟合残差较大值找出试验区的凹凸面临界线分区进行点云拟合,此方案有待进一步研究探讨。
猜你喜欢
浙江人大(2022年4期)2022-04-28
全球定位系统(2021年1期)2021-03-26
当代陕西(2020年23期)2021-01-07
商周刊(2019年19期)2019-10-17
今日农业(2019年10期)2019-01-04
消费导刊(2017年8期)2018-01-18
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
大社会(2016年6期)2016-05-04
全球定位系统(2015年4期)2015-02-28