
智能反射面赋能无人机边缘网络计算卸载方案
2023-01-09 12:33李斌刘文帅谢万城费泽松
通信学报 2022年10期
李斌,刘文帅,谢万城,费泽松
(1.南京信息工程大学计算机与软件学院,江苏 南京 210044;2.北京理工大学信息与电子学院,北京 100081)
0 引言
随着移动通信网络的飞速发展,未来网络将呈现立体化、智能化和绿色等通信特征,并实现万物之间的泛在连接[1-2]。为实现这些要求,网络中的服务质量和应用体验需要显著提高,进而对物联网设备的计算资源与通信资源有了更高的要求。近年来,无人机(UAV,unmanned aerial vehicle)辅助移动边缘计算(MEC,mobile edge computing)被认为是解决资源受限设备与资源匮乏应用之间的紧张关系的桥梁,并能提高通信和计算效率[3]。具体而言,地面用户(GU,ground user)可以将部分任务卸载到具有强大计算能力的MEC 服务器,以保障低时延和低能耗服务。另一方面,由于UAV 的高机动性、灵活部署和低成本[4-5],作为空中MEC 节点的UAV 可以快速部署在需要通信的场景,为GU提供视距(LoS,line-of-sight)链路连接,并带来更高的信道增益,进而降低通信成本。
目前,关于UAV 辅助MEC 的研究已取得了许多有价值的成果。例如,文献[6]研究了一种UAV 辅助MEC 网络,该网络联合优化UAV 轨迹、用户发射功率和计算资源分配以最大化MEC 网络的能效。文献[7]考虑公平性任务调度条件,通过联合优化UAV 轨迹和资源分配以最小化UAV 能耗。文献[8]研究了UAV 辅助的MEC 网络安全卸载问题,使用一台UAV 作为边缘服务器,另一台作为干扰器以压制恶意窃听者信号,进而提出用户最小安全计算量最大化问题。文献[9]使用多智能体深度强化学习方案研究了多UAV 移动边缘计算网络中负载均衡问题。文献[10]研究了工作在全双工模式的多UAV 边缘网络,通过联合优化用户关联和资源分配,构建了系统能耗最小化问题。在空地协同网络中,文献[11]研究了空地协同MEC 网络中服务布置问题。针对用户移动的场景,文献[12]提出一种基于李雅普诺夫在线优化的方法以最小化系统加权总能耗。上述大部分研究工作将UAV与用户通信环境视为视距链路,然而,在复杂的通信网络环境下,如城市建筑密集区,UAV 与GU 的直连链路可能会受到障碍物的遮挡,从而严重影响MEC 网络的性能。
电磁超导体材料的发展推动了智能反射面(RIS,reconfigurable intelligent surface)的研究。RIS 的低功耗、高能效等特性以及无线通信传输环境重构功能引起了业界的广泛关注[13-16]。为了解决在复杂通信网络环境中GU 与UAV 卸载链路受阻的问题,将RIS 引入现有的UAV 边缘网络是一种互惠共赢的解决方案[17-19]。最近,文献[20]针对RIS 赋能的UAV 通信网络,联合优化UAV 部署位置、用户解码顺序、UAV 发射功率和RIS 相移矩阵以最大化网络总吞吐量,并与无RIS 的方案相比,有效地提升了网络性能。文献[21]研究了RIS 赋能的UAV 无线供能网络,通过联合优化UAV 飞行轨迹、RIS 相移矩阵以及UAV 悬停时间以最小化UAV 总能耗。面向RIS赋能UAV 边缘计算网络,文献[22]使用基于深度强化学习的方法以最小化UAV 的总能耗。
上述工作展现了RIS 赋能UAV 通信网络的优势。然而,在更加复杂的通信环境中,RIS 赋能UAV边缘计算网络尚未得到深入研究。为了进一步提高MEC 网络吞吐量,考虑更加真实的无线通信环境,对RIS 赋能UAV 边缘计算网络资源分配和轨迹优化算法的研究具有非常重要的理论意义和现实价值。
本文主要的研究工作如下。
1) 基于城市复杂通信场景,提出了一种RIS赋能UAV 移动边缘计算部分任务卸载方案。同时满足发射功率约束、GU 平均功率约束、时延约束、UAV 轨迹约束、计算资源约束和RIS 相移约束,建立所有GU 的最小平均吞吐量最大化问题。该问题是一个随机、非凸、非线性、多变量密切耦合的优化问题,难以求得其最优解。
2) 利用数学期望的性质,将含有随机变量的约束条件和目标函数转换为确定性的形式。首先,基于交替优化算法将原问题解耦,并转化为3 个子问题。其次,利用连续凸近似、一阶泰勒展开和半定松弛等方法,将非凸问题转换为凸优化问题。最后,通过块坐标下降(BCD,block coordinate descent)算法对子问题逐个求解。
3) 分析了计算复杂度和收敛性。仿真结果表明,所提BCD 算法的收敛性能较好,并且有效提升了网络的吞吐量,与传统方案相比,利用RIS 可以有效提升MEC 网络性能。
1 系统模型及问题描述
考虑到城市环境,UAV 与GU 之间的通信链路易受障碍物的遮挡而影响GU 的上行卸载速率,为此本文引入RIS 技术动态调整入射信号的传输环境以缓解任务卸载速率低的问题。系统模型如图1 所示。
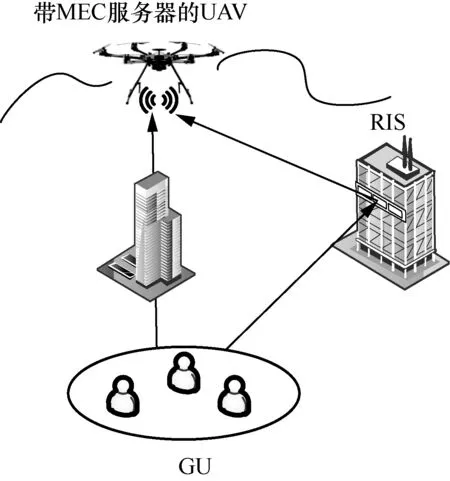
图1 系统模型
该系统模型包括一个单天线UAV,K个单天线GU 以及一个含有M个反射元件的RIS。该UAV 搭载MEC 服务器为GU 提供实时计算服务。为了便于表述和分析,定义GU 和RIS 反射单元的集合分别为 ∀k∈ K ≜ {1,2,…,K},∀m∈ M≜ {1,2,…,M}。假设UAV 的飞行周期为T,飞行高度为H,为了使UAV 的位置相对GU 保持近似不变,将T分割为长度为的足够小时隙,且仅在不同时隙下UAV的位置发生变化,记时隙集合为 N ≜ { 1,2,…,N}。采用三维笛卡儿坐标系,UAV 在第n个时隙内的位置为q[n] =[x[n],y[n],H]T,GUk的位置固定为wk=[xk,yk,0]T,RIS 的位置固定为wI=[xI,yI,HI]T。UAV 在每个时隙内的位移变化与飞行速度有关,且UAV 在飞行周期结束后返回起点,UAV 应满足以下位移约束

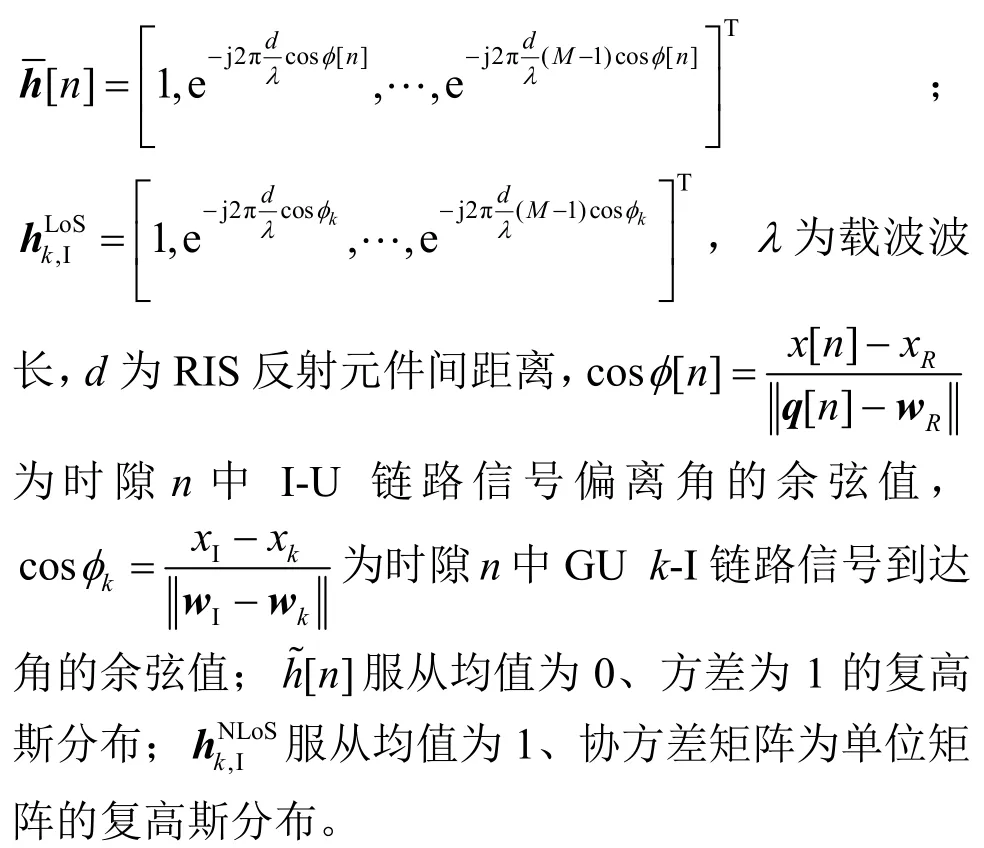
其中,qs和qe分别为UAV 的飞行起点和终点,Vmax为UAV 最大飞行速度。为了便于分析,本文假设RIS 使用均匀线性阵列(ULA,uniform linear array)建模,且每个反射元件能够在调整入射信号的相位后进行反射。在第n个时隙中,RIS 的相移矩阵为

其中,βm[n] ∈ [0,1]为反射系数,θm[n] ∈ [0,2π)为反射角,通常假设βm[n]=1。
1.1 通信模型
实际通信环境中,应根据节点间的不同信道特性分别建模。由于UAV 飞行在低空,RIS 通常部署在建筑物上,因此RIS 与UAV(用I-U 表示)之间不受障碍物遮挡,I-U 链路可采用视距信道模型。由于城市通信环境较复杂,GUk与UAV(用GUk-U表示)之间的链路易受障碍物遮挡,假设GUk-U之间不存在视距链路,故GUk-U 之间的链路可采用Rayleigh 衰落信道模型。此外,GUk与RIS(用GUk-I 表示)的周围存在局部散射,因此GUk-I 链路可采用Rician 衰落信道模型。此时,在时隙n内,I-U、GUk-U 和GUk-I 链路之间的信道增益分别记为hI,U[n] ∈CM×1,hk,U[n] ∈C1×1和hk,I[n] ∈CM×1,则
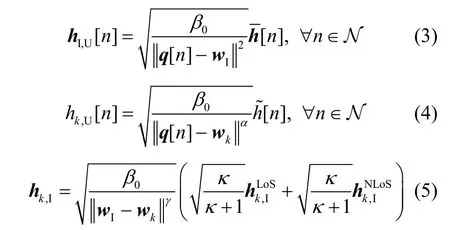
其中,β0为单位距离下信道功率增益;α和γ为路径损耗指数,且α≥ 2,γ≥ 2;
为了避免用户间的干扰,本文采用频分多址技术进行通信,假设网络总带宽为Bt,用户采取等分带宽的方式,则单个用户的带宽为。因此,在时隙n内GUk实现的卸载速率为

其中,σ2为高斯白噪声功率,pk[n]为GUk的发射功率,
1.2 计算模型
假设GU 在每个时隙内产生一个计算密集型任务,且该任务可以划分为独立执行的两部分,然而GU 的计算能力和电池容量有限,GU 需在δt内完成计算,所以需要将部分任务卸载至边缘服务器上处理。定义GUk在时隙n中产生的任务量为Lk[n],划分后的本地任务量为,卸载至边缘服务器的任务量为
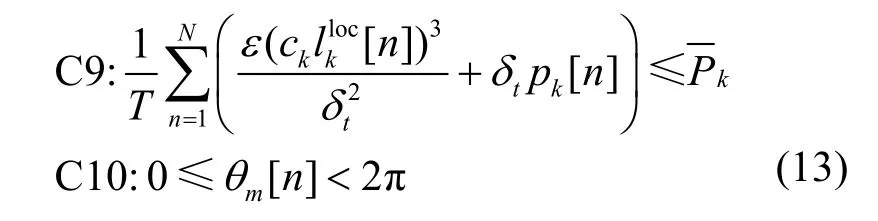
定义GUk的最大计算频率为计算每比特数所需的周期数为ck,ε为CPU 的有效电容系数,fk为UAV 为GUk提供的计算频率资源,并满足为UAV 上CPU 最大计算频率。由于计算出来的结果通常很小,因此回传给用户的时延可以忽略。因此,上述计算方式需要满足如下约束

考虑本地计算采用动态电压频率缩放技术,GU 可以自适应地调整其计算频率,以减少能耗或缩短计算时延,则GUk的计算能耗可表示为
因此,GUk的平均吞吐量可以定义为

1.3 问题描述
假设UAV 可以获得完美的信道状态信息,通过联合优化本地处理任务量l≜ {lk[n],∀k,n}、发射功率p≜ {pk[n],∀k,n}、RIS 相移矩阵Θ≜{Θm[n],∀m,n}、UAV 计算资源分配f≜ {fk[n],∀k,n}以及 UAV 飞行轨迹q≜{q[n],∀n},在时延和能耗的约束下最大化所有GU 间最小平均吞吐量,其优化问题表述如下

2 优化问题转换及求解
2.1 优化问题转换
由于式(12)中Rk[n]为随机变量,本节采取使用数学期望 E{Rk[n]}对其进行分析。由于Rk[n]的概率分布难以得到闭式解析式,因此难以找到 E{Rk[n]}闭式解,故使用引理1 中的推论1 近似Rk[n]。
引理1如果X是非负随机变量,Y是正随机变量,且X和Y独立,对于任意a> 0且b> 0,以下近似结果成立[20]。

推论1如果X是非负随机变量,对于任意a> 0且b> 0,以下近似结果成立。

证明由于常数是随机变量,而满足均值为其自身,方差为0。同时,常数与任意随机变量独立。因此,不妨选取Y就是常数1。将其代入引理1,推论1 得证。
首先,计算hk[n]的数学期望。

根据上述分析,式(13)的目标函数可以描述为

因此,式(13)可以转换为
易知,式(20)依旧为非凸问题。为了有效求解该问题,本文通过BCD 算法将问题解耦为3 个子问题,然后分别进行求解。3 个子问题具体如下:1) 固定UAV 飞行轨迹和RIS 相移矩阵,通过连续凸近似方法求解GU 发射功率、本地处理任务量和计算资源分配;2) 固定GU 发射功率、本地处理任务量、计算资源分配和RIS 相移矩阵,通过松弛操作以及连续凸近似求解UAV 飞行轨迹;3) 固定GU发射功率、本地任务量、计算资源分配和UAV 飞行轨迹,利用半定松弛技术以及罚函数法求解RIS 相移矩阵。最后,对所有变量进行交替优化直至收敛。
2.2 求解发射功率、本地处理任务量及计算资源分配
当固定UAV 飞行轨迹和RIS 相移矩阵时,问题描述如下

其中,C6'左边是关于pt[n] 的凹函数,因此C6'是非凸约束,对C6'进行一阶泰勒展开,则有

将变换后的式(23)替换式(21)中的C6'后,所得到的问题为

式(24)为标准凸优化问题,可以借助CVX 工具进行求解[23]。为了保证问题式(24)对子问题式(21)有较好近似效果,此处采取连续凸近似在每次迭代中多次逼近原问题。
2.3 求解UAV 飞行轨迹
当固定GU 发射功率、本地处理任务量、计算资源分配和RIS 相移矩阵时,问题描述如下
由于约束C6'、C7'和C11的非凸性,子问题式(25)难以求解。为了便于求解,本节引入2 个松弛变量:的上界和的上界,则有


式(26)和式(27)是非凸约束,对其等号左边进行一阶泰勒展开,可得

式(28)中,[n]Ak包括偏离角,难以直接进行处理,因此引入式(32)所示约束。

其中,q(l)[n]为第l次连续凸近似的值,δmax为UAV最大允许位移。当δmax足够小时,可近似认为每次迭代后信号偏离角保持不变。第(l+1)次迭代基于在第l次迭代中的信号偏离角。因此,式(28)仅取决于uk[n]和u[n]。因此,使用下述引理来处理该式。
引理2对于任意a1≥ 0且a2≥ 0,当x1,x2≥0时,g(x1,x2)=a1(x1)-α+a2(x2)-2是联合凸的。


由上述分析,约束C7'可改写为
则约束C6'和约束C11可分别表示为
则子问题式(25)可重构为

式(39)是标准凸问题,可以使用CVX 工具包进行求解。
2.4 求解RIS 相移矩阵
当固定GU 发射功率、本地处理任务量、计算资源分配和UAV 飞行轨迹时,优化问题为


根据引理3,将rank(V[n])=1转换形式,并将转换后的结果作为罚项添加在式(40)的目标函数中。则式(40)可重构为
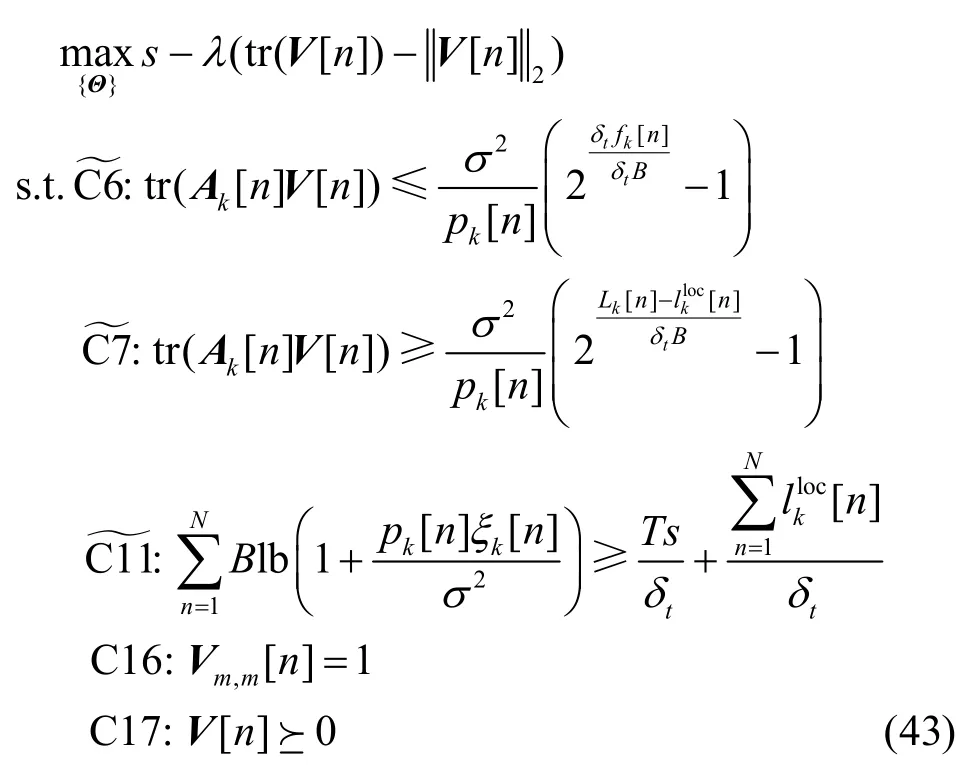
其中,λ> 0为罚因子。式(43)目标函数是凸函数之差,故问题依旧非凸。接下来,对目标函数利用连续凸近似方法,将目标函数转换为凸函数。

故式(45)是标准凸优化问题,可以使用CVX工具包进行求解。
2.5 BCD 算法设计
BCD 算法如算法1 所示,算法具体流程如图2所示。
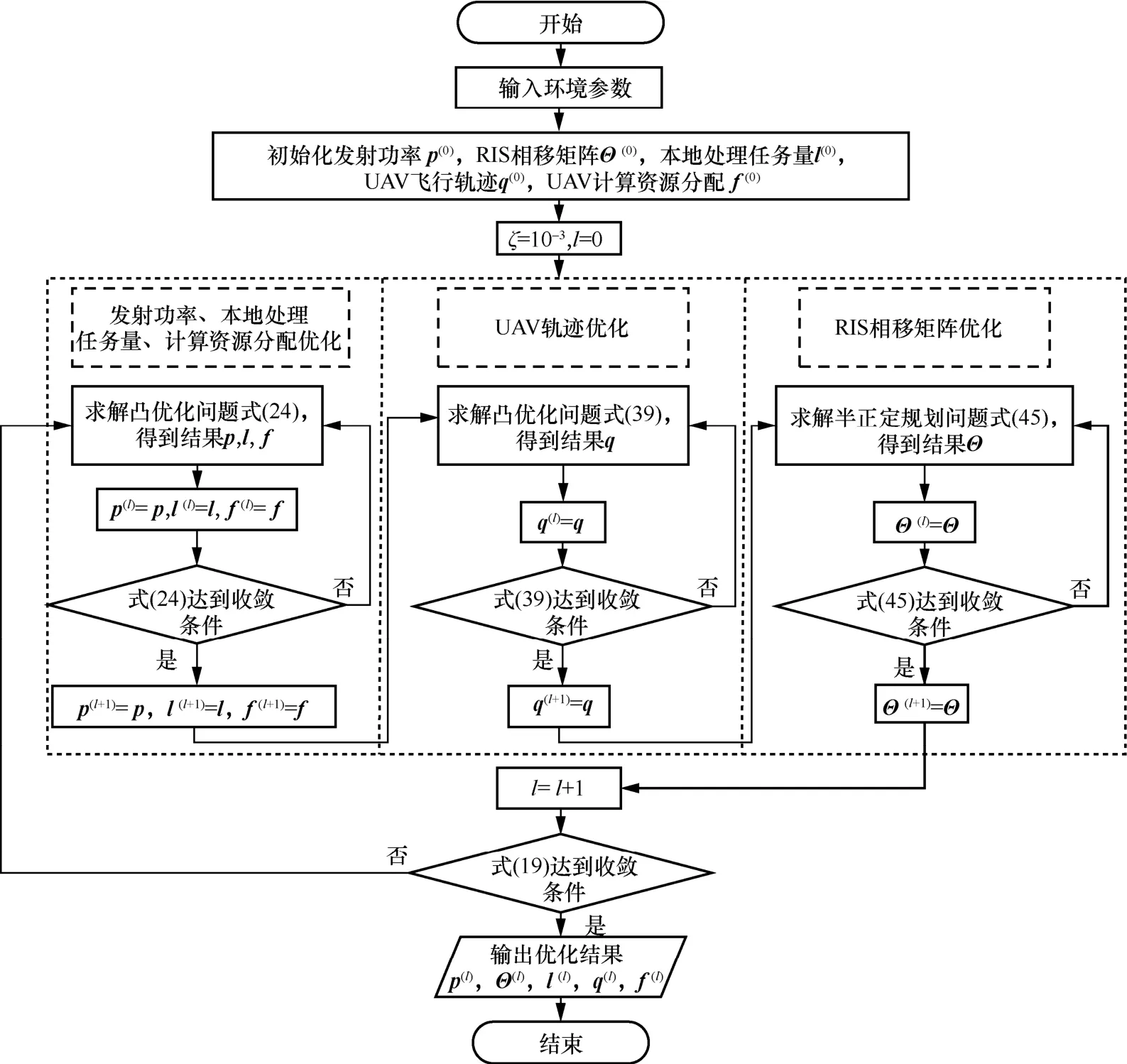
图2 算法具体流程
算法1BCD 算法
初始化p(0),Θ(0),l(0),q(0),f(0),迭代精度参数ζ=10-3,迭代次数l=0
1) 循环
2) 给定UAV 飞行轨迹q(l)和RIS 相移矩阵Θ(l),使用连续凸近似方法求解问题式(24),得到p(l+1),l(l+1),f(l+1)
3) 给定GU 发射功率p(l+1)、本地处理任务量l(l+1)、计算资源分配f(l+1)和RIS 相移矩阵Θ(l)时,使用连续凸近似方法求解问题式(39),得到q(l+1)
4) 给定GU 发射功率p(l+1)、本地处理任务量l(l+1)、计算资源分配f(l+1)和UAV 飞行轨迹q(l+1),求解问题式(43),得到Θ(l+1)
5)l=l+1
3 计算复杂度与收敛性分析
3.1 计算复杂度分析
优化问题式(24)包含3KN个优化变量,因此使用连续凸近似方法求解的复杂度为。优化问题式(39)使用连续凸近似方法求解,每次求解包括2N个变量,因此复杂度为。优化问题式(45)由半正定规划方法求解,其复杂度为。对于交替优化算法1,每次迭代需要求解3 个问题,故算法1 的总复杂度为

3.2 收敛性分析
设算法1 中第l次迭代所得优化问题式(20)目标函数值为,因此有

其中,不等号(a)、(b)、(c)成立的条件在于每个子问题都能得到最优解,从而确保目标函数值在迭代过程中单调非减,且优化变量有界,因此所提BCD算法能够保证收敛。
4 仿真分析
为了验证本文方案的有效性,本节进行了仿真验证。考虑用户所在区域半径为120 m,其中心位于(120 m,120 m),RIS 位于(120 m,0 m,50 m),UAV 飞行起始位置为(-30 m,0 m,100 m),UAV 飞行终点位置为(-30 m,240 m,100 m),用户与UAV 直接链路的路径损耗指数为α=3.6,间接链路的路径损耗指数为γ=2.2。噪声功率为σ2=-1 10 dBm,用户最大发射功率为pmax=0.5 W,用户与UAV的可用计算资源分别为电容系数κ= 10-28,平均总功率,任务数据量Lk[n]∈[ 0.5 Mbit,1.0Mbit],网络总带宽Bt为1 MHz,参考距离为1 m 处的信道功率增益为β0=-3 0 dB,时隙数N=25,飞行周期T=25 s 。为简化计算,将25 个RIS 反射元件作为一个RIS 子表面,将每个子表面中反射元件的相移设置为相同值[20]。
用户数量K=14时,所提BCD 算法收敛性如图3 所示。从图3 中可以看出,当固定用户数量,RIS 子表面数量分别为50 和70 时,随着迭代次数的增加,BCD 算法在4 次呈现收敛,收敛较快,用户最小平均吞吐量提升约0.3 Mbit/s。这验证了所提BCD 算法在提升最小平均吞吐量的有效性,并能在较少的迭代次数内得到较满意的优化结果。
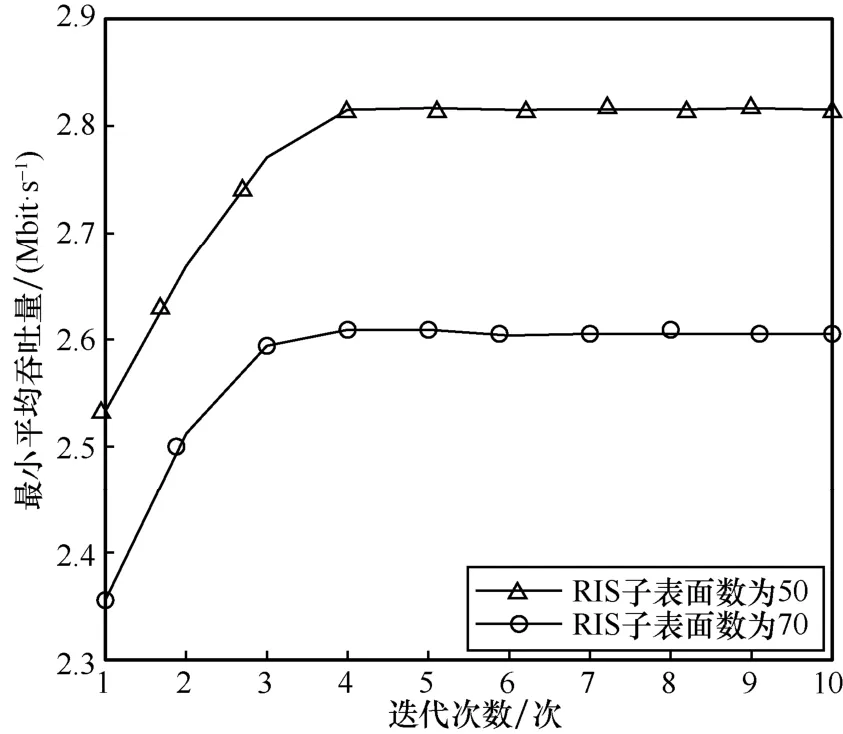
图3 BCD 算法收敛性
最小平均吞吐量与用户数量的关系如图4 所示。从图4 可以看出,在RIS 子表面数量为30~60时,最小平均吞吐量随用户数量增加而逐渐降低,且最小平均吞吐量随着RIS 子表面数量增加而提升。随着用户数量增加,每个用户所分得的带宽资源和UAV 计算资源减少,进而限制了用户的任务卸载能力,由于本地计算频率和平均功率预算受限,故本地和边缘的任务处理能力降低,进而使吞吐量降低。进一步从图4 中可以发现,最小平均吞吐量下降幅度逐渐减缓,这是由于随着用户数量增加,用户平均带宽资源减少的幅度不断减慢,进而导致最小平均吞吐量降低幅度减小。
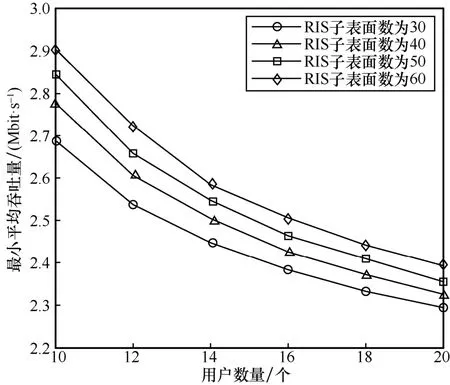
图4 最小平均吞吐量与用户数量的关系
最小平均吞吐量与RIS 子表面数量的关系如图5所示。仿真结果表明,随着RIS 子表面数量的不断增加,用户的吞吐量逐渐提升。这是由于在本地计算能力与功耗约束下,RIS 反射元件经过相移优化后,RIS子表面数量的增加会进一步增强通信链路,进而增大信噪比与卸载速率,使MEC 网络任务卸载能力增强,进而使网络吞吐量提升。因此可以得出,增加RIS反射元件数能有效地提升用户服务体验。
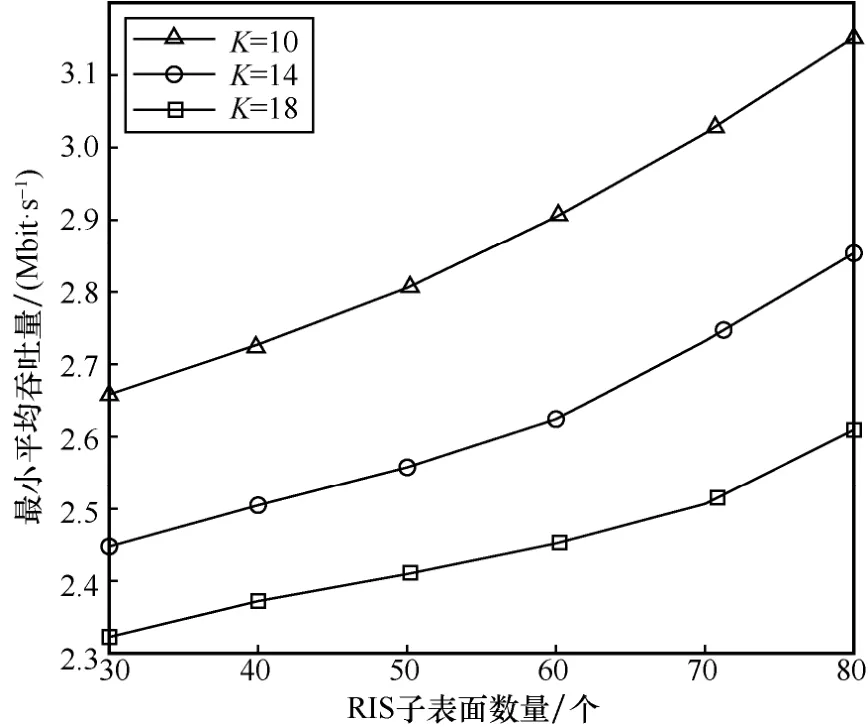
图5 最小平均吞吐量与RIS 子表面数量的关系
不同用户数量下优化得到的UAV 轨迹如图6所示。从图6 可以看出,在用户数量K分别为10和16 时,UAV 能够接近用户与RIS,并为用户提供更强的卸载链路,从而提高吞吐量,改善用户服务体验。这验证了本文方案对于UAV 轨迹优化的有效性,能够通过优化轨迹以协同RIS 提供更好的MEC 卸载服务。

图6 不同用户数量下优化得到的UAV 轨迹
不同优化方案的性能对比如图7 所示。其中,固定相移方案将RIS 反射元件的相移设置为固定值,随机相移方案将相移设置为随机值而不优化,固定UAV 轨迹方案令UAV 由起点匀速直线飞行至终点。从图7 可以看出,随着RIS 子表面数的增加,使用RIS 辅助方案的吞吐量逐渐增加,并且高于无RIS 辅助方案。其中,本文方案的最小平均吞吐量最大,固定UAV 轨迹方案次之,固定相移方案与随机相移方案的最小平均吞吐量较小,同时,对于随机相移方案与固定相移方案,RIS 反射元件数增加所带来的性能增益较弱。这是由于经过优化UAV轨迹能够顾及用户体验,从空间上改善链路质量,而RIS 相移的优化能够改善信号的传输环境,进而提升卸载速率以更好地提升吞吐量。
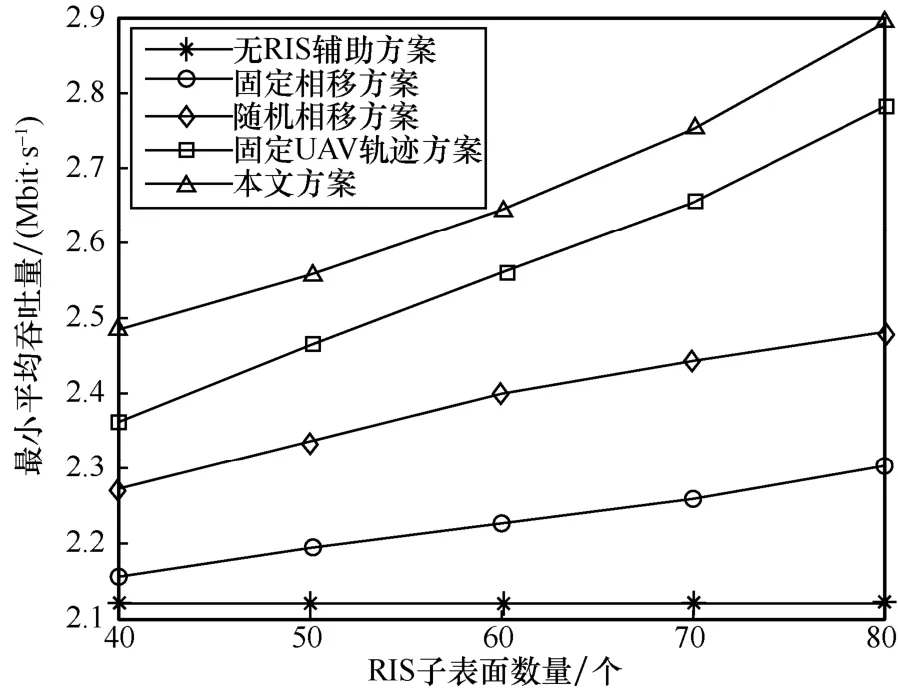
图7 不同优化方案的性能对比
在实际应用中,由于RIS 反射元件的相位调节是离散的,且离散的分辨率取决于量化的比特数。连续相移和不同比特位数相移下的最小平均吞吐量如图8 所示。在迭代停止时,将优化后的连续相移量化为离其最近的离散值,其中bbit 量化下的离散值集合为{0,2 π × 2-b,…,2π× (1 -2-b)}。从图8 可以看出,离散相移方案的平均最小吞吐量低于连续相移方案,并且随着量化比特数的增加,性能差距逐渐缩小,4 bit 相移方案与连续相移方案性能相近。

图8 连续相移和不同比特位数相移下的最小平均吞吐量
5 结束语
本文研究了一种智能反射面赋能的无人机边缘计算任务卸载方案。旨在通过联合考虑任务分配、用户发射功率、智能反射面相移矩阵、无人机计算资源分配以及无人机轨迹,建立一个最大化用户的最小平均数据吞吐量问题。该问题是一个随机优化问题,且优化变量之间密切耦合。首先,通过利用数学期望的性质,将随机优化问题转换为确定性优化问题。其次,利用块坐标下降算法将确定性优化问题分解为3 个子问题,并通过引入辅助变量、利用连续凸近似和半定松弛方法将非凸问题转换为凸优化问题,进而得到问题的近似次优解。仿真结果表明,所提方案具有良好的收敛性能,并有效地提高了用户的平均数据吞吐量。
猜你喜欢
软件(2020年3期)2020-04-20
物流科技(2018年4期)2018-05-21
无线互联科技(2017年24期)2018-01-22
中国管理信息化(2017年18期)2018-01-04
大经贸(2017年6期)2017-07-29
集装箱化(2017年4期)2017-05-17
集装箱化(2016年11期)2017-03-29
集装箱化(2016年12期)2017-03-20
物联网技术(2017年2期)2017-03-15
军事交通学院学报(2016年6期)2016-09-22
