
基于自适应区域生长算法的口腔CT图像分割
2023-01-07 13:04杨政威
甘肃科技 2022年18期
史 历,杨政威,王 朕
(天津财经大学理工学院,天津 河西区 300222)
1 引言
近年来,随着计算机技术的发展和经济水平的提高,牙科CT技术逐渐发展成为了医疗健康行业的热点,被广泛地应用到种植牙手术前期、牙槽骨外科手术以及牙体牙髓病科治疗等口腔医学临床中。但目前,大多数的医疗设备扫描得到的CT图像仅仅是人体某部位的断层数据,由此呈现出来的二维图像相对固定、模糊。除此之外,当出现测量数据存在缺陷或者多种物理因素引起投影数据判读错误时,CT图像中还可能出现非真实的结构体即出现伪影,这造成了医生在诊断病人病情时潜在的不确定性。因此,利用已有的二维图像实现口腔CT数据的三维可视化,将各部位的三维结构显示出来是十分有必要的。而在口腔可视化的过程中,图像分割是至关重要的一步,图像分割不仅是图像处理与分析的关键技术也是后续三维重建的工作基础。在计算机断层扫描的口腔切片医学图像中,如何在CT值相差不大、边缘模糊以及背景灰度值重叠区域的情况下精确地分割出感兴趣的牙齿区域是一个具有挑战的课题。
图像分割的原理为:根据图像的某些特征信息,比如图像的灰度、空间纹理、结构形状等,把图像上具有相似特征的像素归为一个区域,这样图像就会被划分为若干个不同区域,且不同的区域间具有明显的特征差距。简单地说,图像分割就是从背景中分割出目标区域。从20世纪70年代开始,图像分割问题就引起了很多学者的关注。到目前,尽管还未研究出一种分割方法能适用于各种不同特征的灰度图像,但图像分割的一般性规律在不断完善的过程中基本上形成了共识,可以将常用的分割方法划分为基于阈值的分割方法、基于区域的分割方法、基于边缘的分割方法和基于聚类分析的图像分割方法等。阈值分割是区域并行技术使用较多的一种,用图像的灰度特征对像素点进行划分,根据目标的个数可以选择单阈值分割或多阈值分割。阈值分割具有数据计算量小、实用性强的优点,但对噪声敏感。区域分割按从单个像素点开始合并到目标区域或是从全局开始分裂再合并成目标区域的基本思想,分为区域生长和区域分裂合并2种基本形式。区域分裂合并算法首先确定分裂的条件,把每个区域分裂为不满足条件的最小单元区域,然后再把这些小区域中具有相似特征的合并在一起,构成最终的分割区域。区域分割在分割复杂图像时效果较好,但往往会造成图像的过度分割。边缘分割通过求像素点的导数来检测不连续性即检测出边界处的边缘,由此来解决分割问题,但常用来进行边缘检测的一阶和二阶微分算子对噪声敏感,在边缘检测时不能同时满足高抗噪性和高检测精度。聚类分析的图像分割中最常用的算法是K均值算法和模糊C均值聚类(FCM)算法,K均值算法是从图像中选出初始类簇中心,簇中心一般是随机选取的k个像素点,计算图像中其他像素点与簇中心之间的距离,再将该像素点归类到与之距离最短的簇中心所在的类簇。FCM算法可以说是K均值算法的推广,利用模糊C均值非监督模糊聚类标定的特点,计算出每个像素点与c个簇中心的隶属度,根据像素点在0,1之间的隶属度来确定所属某个聚类的程度进行图像分割。FCM算法可以减少人为的干预,但传统的FCM算法没有考虑空间信息,对噪声和灰度不均匀敏感。
2 区域生长法
区域生长法是基于区域分割的一种方法,也被称为区域增长法,最早是由Levine等人提出。其基本思想就是从单个像素出发,把性质相似的像素点融合成区域。具体地说,区域生长法首先需要在每个要分割的区域中选取某个像素点(或者某个小区域)作为生长的种子点,然后通过确定的相似准则,从种子像素周围的邻域中挑选出与种子像素性质相似的点加入到种子像素所在的初始区域。把扩大后的区域看作是新的像素区域,新区域里的像素当做新的种子像素,重复上述的扩充过程。最后,在找出所有满足条件的像素点时停止生长。区域生长的分割方法一般分为2种:一种是在目标区域中选择出种子区域,把种子区域看作是一个初始集合,经过不断地对周围的像素点筛选,将满足条件的点加入到初始集合中,结合成最终区域;另一种则是先将图像分割为相似性较强的小区域,再将这些小区域法通过一定的规则连通为大区域,达到分割的目的。
区域生长算法的初始化简单,基本思想容易理解,因此被应用到多种医学图像分割中。近年来,专家和学者相继对原区域生长算法提出了改进和拓展。例如,为解决区域生长算法处理后图像边缘不平滑有空洞的问题,文献[1]在原算法基础上使用了形态学滤波,还结合了数学形态学的腐蚀和膨胀等技术,能够避免阈值分割方法分割时不准确的问题。应用在肝部CT图像ROI的分割中,能够在保留边缘信息、消除空洞的同时降低了算法的复杂度;在有效防止区域过分分割的问题上,文献[2]提出来以模糊连接度作为生长原则,判断生长点与种子点之间的相似性,按模糊连接的强弱来对生长点的生长进行排序,并采用自适应阈值与USAN面积相结合的方法终止生长,保证了区域的完整性和算法中边缘定位的准确性,在随机选取种子点的条件下也能产生一致的分割效果;关于种子点的选取,文献[3]使用了Otsu阈值算法生成阈值灰度图,遍历阈值灰度图,以像素点中位数为区域生长的种子点进行红外图像分割,此方法可以更准确地获得目标区域的种子像素点,提高了分割目标设备的精确度。
在口腔修复临床中,医生往往需要先获取到整个或者单独一颗牙齿的三维形态信息来完成修复前的准备工作。通过目前口腔信息最常用的CT扫描技术得到的口腔二维CT图像相较于其他的扫描技术产生的图像,能够获取到患者口腔中的牙冠、牙根等信息,为口腔正畸治疗提供了必须的关键信息。但随着口腔牙科市场的快速发展,扫描得到的二维CT序列图像不能够直观准确地为医生显现诊断信息,所以将感兴趣区域的数据信息提取分离出来建立三维模型有实际的价值意义。从现有的牙齿CT图像上可以观察到两颗牙齿之间的间隙过小、牙齿与之周围包裹牙齿的牙槽骨之间灰度值相差不大以及有的牙齿形态体积过小,这些图像特征一定程度上增加了单颗牙齿分离和提高牙齿分割精确度的难度。因此,本研究将区域生长算法应用到口腔CT图像的分割中,把牙齿从牙颌中分割出来,提取出想要的牙齿;还能够通过人工自由选取种子点的方法,实现单颗牙齿的分割,对医生的诊断和治疗带来了一定的帮助。
3 自适应区域生长法
3.1 参数的确定
自适应区域生长算法的关键有3个,首先是初始像素点(种子点)的选取。在二维的图像中,我们一般会选择种子点的3×3邻域排除选择噪声点的可能;在三维图像上,为避免出现种子点的误选,我们同样采用种子点的26邻域作为初始像素区域。其次就是生长的相似性判断准则,根据需要分割图像的具体特征选用正确的生长准则对图像分割最后的效果也起着举足轻重的作用。
以下是本研究使用的生长准则:设第n次生长的区域为πn,计算出区域πn上的3个主要参数平均灰度mn、平均梯度‖‖n和标准差Dn。与传统区域生长算法相同,自适应区域算法的平均灰度mn的值依赖于已经生长到的区域πn中所有的像素点。记num(πn)为πn中所有像素点的个数,用I(y)表示各个点的像素值,mn可由计算式(1)得出。

类似平均灰度,平均梯度也采用πn区域上各像素点的平均梯度来计算。用Robot算子计算出像素点y的梯度值▽I(y),可由计算式(2)得出‖▽‖n。

本研究将采用文献[4]中改进的标准差Dn。

有上述给出的3个参数值之后,可以得到本研究的生长准则,如公式(3)所示。

其中θ、α、β为人为选择的参量系数。在生长准则的公式(3)中,平均灰度、平均梯度和方差三者共同的作用是确保新生长点的灰度值在允许变化的范围内,围绕在均值上下波动。当点的像素值超过所给的范围,就会被当作异常点排除,因此不会产生灰度值过分偏差的点,保证了新的区域与已生长区域之间的相似性。
区域生长法最后一个关键要素就是算法的停止,为了防止过分分割的情况出现,本研究将在无新的生长点加入时结束迭代过程。
3.2 算法实现步骤
本文所提出的自适应区域生长算法的主要实现步骤如下:
步骤一,在口腔CT图像中人工选择初始像素点(生长点)O,以初始点的26邻域为初始区域。
步骤二,将种子点26邻域中的像素点压入堆栈Q,将初始点O标记后放入集合C。
步骤三,利用上述的公式(1)、公式(2)和公式(3)计算出集合C中所有像素点的平均灰度、平均梯度和方差。
步骤四,选取堆栈中的点,将其26邻域中未被标记且满足生长准则的点放入Q中,并将该点标记后放入集合C。
步骤五,判断堆栈中是否有点;若有,转到步骤三;否则,算法结束。
4 实验结果与分析
在生长准则的公式(3)中θ、α、β作为人为参数,它们的选取对图像的分割效果也有至关重要的作用,为了确定三者的取值从而达到最佳分割效果,本文将采用二分法不断逼近它们的最佳取值,以分割某颗牙齿为例,实验效果及实验分析如图1所示。
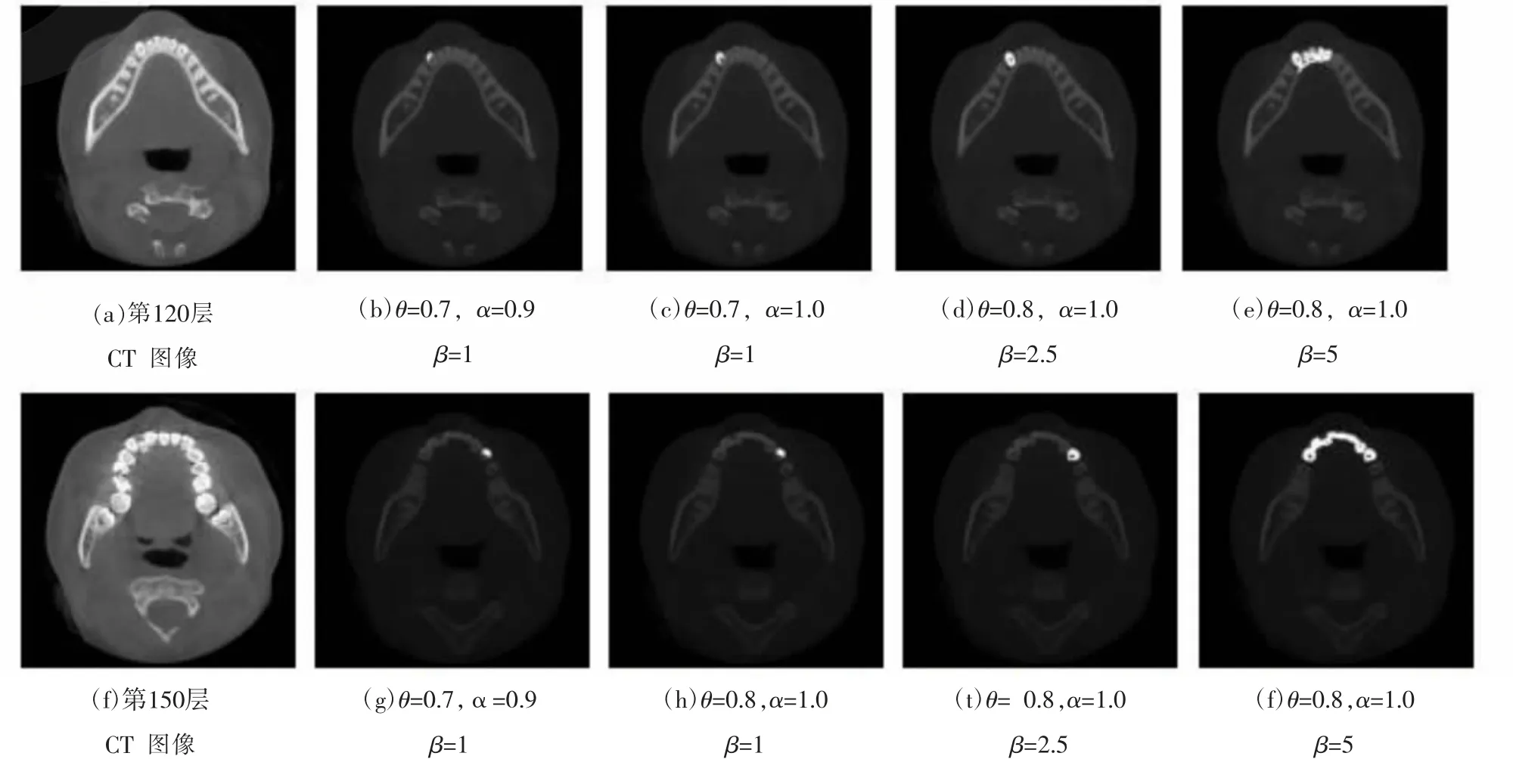
图1 CT原始图和不同θ、α、β值得到的分割效果图
从图1中可以看到不同的取值会使分割的效果产生了较大的差异,当固定θ、α(β)的取值,β(θ、α)取值偏小时,分割会停止,无法得到完整的牙齿分割图像,如图1(b)和(g)所示;当固定θ、α(β)的取值,β(θ、α)取值偏大时,会出现过分分割的现象,将临近的牙齿也包含进来,如图1(e)和(j)所示。最后通过多次实验发现,当系数θ=0.8、α=1.0、β=2.5时牙齿CT分割出来的效果最为理想,可以得到完整的牙齿图像,如图1(d)和(i)所示。
确定最佳的θ、α、β的取值后,本研究将导入221张DICOM格式的二维口腔CT序列图像,使用上述的自适应区域生长算法分割后,利用VTK(Visualization Toolkit,可视化工具包)进行三维重建得到图2。同时,区域生长法可以单独分割出某颗牙齿,如图3所示。

图2 分割和三维重建后的牙齿三维图像

图3 分割和三维重建后某颗牙齿的三维图像
5 结论
本研究提出一种自适应的区域生长算法,使用已生长区域的平均灰度值、平均梯度和方差对原有的生长准则改进,同时通过实验确定了人为参数α、β、θ的取值。能够从口腔CT图像中分割出感兴趣的部分牙齿或者某颗独立的牙齿图像,为后续图像的三维可视化过程提供了较好的基础,重建后得到的牙齿三维形态能够帮助医生直观地获取到牙齿的结构,具有一定的实用价值。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
天津医科大学学报(2021年1期)2021-01-26
现代电子技术(2021年1期)2021-01-17
中国信息技术教育(2020年2期)2020-02-02
微型电脑应用(2019年1期)2019-01-23
电脑知识与技术(2018年35期)2018-02-27
小天使·一年级语数英综合(2017年8期)2017-08-04
小天使·一年级语数英综合(2016年11期)2016-11-28
创新作文(1-2年级)(2015年11期)2015-11-28
