无人机航拍技术在养殖用海调查中的应用探析
2023-01-07 04:11许春晓
渔业研究 2022年6期
许春晓
(福建省水产研究所,福建 厦门 361013)
社会经济的高速发展催生了一批先进的仪器和技术在工程测绘行业的应用和发展。其中,以无人机航拍技术在工程测量和测绘中的广泛应用最具代表性,通过无人机高空飞行与拍摄测量,运用自身的传感器设备进行测量对象的图像拍摄与采集后,利用有关图像处理技术对所获取的图像数据进行深入分析,从而有效地满足工程测量测绘与实际需求[1]。无人机技术目前主要应用于航空拍摄、航空摄影、地质地貌测绘、管道线路巡查、海事侦察、环境监测等。近年来,无人机在海洋测绘、海岸带调查、防灾减灾等海洋领域发挥着越来越重要的作用。
无人机航拍技术工作原理是以无人飞行器作为载体,在进行全球导航卫星系统(Global navigation satellite system,GNSS)导航与测量单位(Measurement unit,MU)定姿模块选择基础上,利用具有较高分辨率的数字相机在高空进行地面事物的全面拍摄,对拍摄获取的图像资料则利用计算机软件进行有效处理和分析,从而满足有关工程的测量与测绘需求[2]。无人机航拍工作主要包括以下几个方面:野外像控点的布设和测量、取得测区影像数据、内业空三加密以及数字测图[3]。无人机航拍技术在应用过程中属于新兴的测量测绘技术,具备较高的智能化和自动化等特点[4]。无人机航拍设备的体积相对较小、作业范围广、结构简单,通过遥控器就能对其进行远程控制,而且通过相关指令的输入还能使其自主飞行,工作过程相对简便[5]。相对于传统测绘,无人机航拍技术受自然条件因素影响小,突破了自然环境的限制应用,具备较强的灵活性,而且无人机利用低空飞行获取的高分辨率数据和信息,可以满足海洋测量测绘的需要[6-7]。典型案例有无人机海岸地形测量应用[8]、无人机应用于海岸地形测量[9]、无人机航空摄影技术在厦门滩涂养殖调查的应用[10]。
养殖用海属于渔业用海范畴,在福建省沿海地区海洋经济中占据重要地位。福建省养殖用海分布较为分散,且养殖用海类型多样、养殖方式多变,导致养殖用海面积测量难度较大。传统养殖用海调查是人工采用实时动态仪器(Real-time kinematic,RTK)对养殖设施边界进行实地测量,存在工作量大、耗时耗力、效率低等缺点,且形成的调查底图为点单元,形式单一,无法校核比对测量结果。
本文根据无人机航拍的技术特点,结合无人机航拍在福建东山八尺门海域养殖用海调查的应用实例,对其技术路线、航线及像控点布设、专题线划图勾绘、准确度验证等有关事项进行实践探讨,总结一套无人机航拍养殖用海调查实施方案,以期为今后其他地区养殖用海调查提供参考。
1 材料来源与分析方法
1.1 测区概况
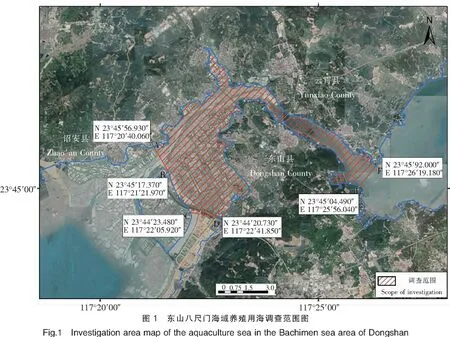
东山八尺门海域位于福建东南的诏安湾和东山湾之间的东山岛北端,为两海湾之间连接的狭长海峡,将福建省第二大岛的东山岛与大陆分开。东山八尺门海堤建成于1961年,初衷是为了解决进出东山岛的交通问题。八尺门海堤长期阻断东山湾与诏安湾水体交换,造成海堤两侧淤泥淤积严重,加之网箱养殖业的发展和周边各类污染物的排放,湾内水质日趋富营养化,造成八尺门海域水环境恶化[11]。为了解东山八尺门海域养殖用海情况,2020年10月采用无人机对该海区进行航拍调查,调查范围面积为696 hm2(图1)。
1.2 技术路线
1.2.1 总体技术路线
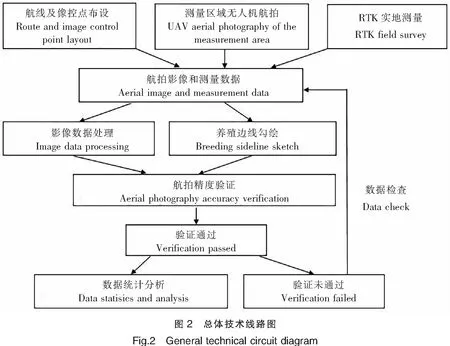
本项目的总体技术路线:首先进行外业像控点布设,采用RTK测量像控点和检查数据坐标,然后对测区进行无人机航拍,之后在内业制作正射影像,并基于正射影像成果采集、养殖专题线划图,进行成果精度验证后用于数据统计分析。
1.2.2 航线及像控点布设
八尺门海域地形复杂多变,养殖类型包括围垦、底播等。为保证航拍所获取的数字航空影像完整覆盖所测区域,影像匹配过程中不出现相关的盲区,航拍测区范围覆盖调查区域,测区面积约980 hm2。同时为保障项目的精度,在测区内岛礁、码头、海堤、近岸民房等特征构建筑物上布设像控点,共计54个。为了更好地凸显测量要素,将测区分割为20个小区块进行分区测量,开阔海域航线布设间距相对较大(图3)。

采用布设地面对空标志的方式进行像控点布设及测量,像控点标志制作遵循以下原则:采用L型标记,测量L内角坐标;L符号宽度不短于20 cm,长度不短于50 cm;地面有明显标线、尺寸和颜色达标的也可以作为对空标志;像控点用与地面颜色反差较大的材料标记,例如红油漆、白石灰;位置选择平地。点位周围、尤其是上空无遮挡;测定像控点坐标采用三角支架固定,采用控制点测量模式,平滑处理;像控点位置拍照,考虑到无人机的视角,拍照需充分体现像控点与周边地物的相对位置关系,以便内业在照片上寻找像控点。
像控点的平面坐标、高程的测定:采用福建省连续运行参考站(Continuously operating reference stations,CORS)联网的全球卫星定位系统实时动态仪器(Global positioning system_real - time kinematic,GPS_RTK),对所有像控点一一测量,以获取2000国家大地坐标系(China geodetic coordinate system 2000,CGCS 2000)平面坐标(中央子午线为117°,3°带高斯正形投影),经C级控制点计算高程转换参数后转换为85黄海高程。
1.2.3 测量区无人机航拍
本次航摄采用设备为M300-RTK无人机,航空摄影相机为禅思P1数码相机,有效像素 2 420×104,获取航线垂直向下的真彩色数码航空影像,数码航空影像地面分辨率优于0.1 m。能够保障稳定航摄。
本次航摄航高设置为300 m;航向重叠70%、旁向重叠60%;无人机航飞速度为15 m/s;风力≤10 m/s;选择光照充分、成像清晰且低潮位时段飞行;分区实施航飞,在围垦海堤、码头等开阔区域寻找合适的起飞点,能够保障安全起飞和返航。
1.2.4 现场实际测量
采用中海达R2 RTK,外业测量五宗村集体养殖池塘围堤外侧坡顶线数据,用于检查内业测图成果。
1.2.5 影像数据处理
本测区空中三角测量,采用Pix4D V3.25自动空三测量加密软件。采用全片密集自动选点、点位均匀分布方式,构网力度强,航线区域网局部平差与光束法整体平差技术,可增强粗差检错能力,有效地降低构网的系统误差,提高加密精度和可靠性。
图像预处理:检视影像的清晰度、色彩、对比度等,剔除不合格的影像;检视POS参数,剔除不合格的数据;进行数据预处理,检查航向重叠、航线间距、航线偏角是否符合要求。
航空摄影平差计算:自由网平差计算、约束网平差计算;输出平差报告;输出影像的内、外方位元素。
DEM的制作:创建立体模型-生成核线影像-影像自动匹配-匹配点编辑-DEM 自动生成-DEM 编辑-裁切和分幅。
DOM 制作:Pix4D V3.25进行自动正射纠正,自动匀色,镶嵌成图、色彩精编,分幅与裁切。
正射纠正:应用实测像片控制点,结合预处理后的 DEM,基于有理多项式函数模型,应用软件对影像进行批量数字微分纠正。
影像匀光、镶嵌与修补:在影像镶嵌之前选取标准片利用匀光软件,减少相邻图幅、像对之间的接边误差和色彩差,依据标准片的参数对融合后的影像进行匀光,使用PhotoShop对DOM进行局部色差调整,以弱化色差。
影像裁切:按照1∶1 000标准分幅(50 cm×50 cm),用 ArcGis 10.0软件,直接按内图廓批量裁切出图,分幅文件严格拓扑,外扩距离为0,影像格式为标准TIFF格式,分幅文件以图幅号命名。
1.2.6 养殖边线勾绘
基于航测1∶1 000正射摄影测量成果,采用南方数码iData3D立体测图软件进行航测数据采集,南方数码CASS 9.0软件编绘成图。围垦区域重点采集池塘和养殖水面,对池塘和海堤的顶部及底部等标注高程特征点。围垦池塘堤岸宽度达到1 m,勾绘双线堤岸,宽度小于1 m则勾绘为单线,海堤根据坡度及加固情况,区分勾绘为陡坎、未加固陡坎、加固斜坡和未加固斜坡。地形以滩涂高程点、航道水深点及等高线为主,少量堤岸,以坡或坎的形式体现。网箱、浮筏养殖主要勾绘养殖设施外侧边线。
2 结果与分析
2.1 调查海域航拍正射影像结果
本次通过航拍及内业数据处理,最终获得的东山八尺门海域航拍成图图件影像清晰、层次丰富、反差适中、色调均匀。相同地物的色调基本一致,相邻航带之间色彩过渡自然。像片的主要点或者在其相邻照片上的对应位置上均不存在阴云、大团云阴影与烟雾,不存在单块云、密云阴影或烟雾使地物变得模糊的面积超过像片的3%。最终形成1∶1 000真彩色数字正射影像图(图4)。

2.2 调查海域养殖专题线划图勾绘
根据以上正射影像,按照养殖边线勾绘原则,勾绘海岸线内侧的海水养殖区边线,结果见图5。
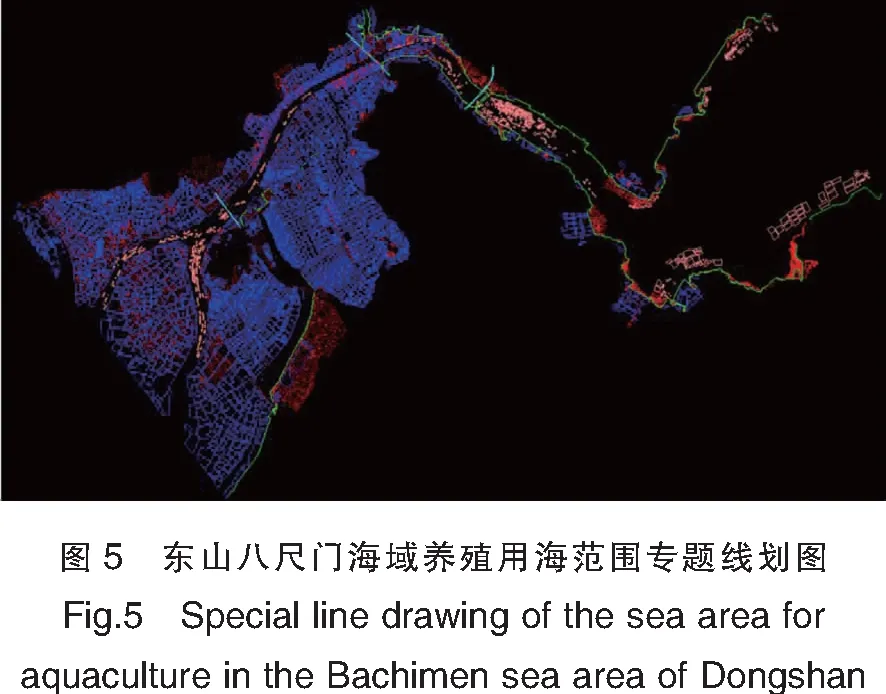
注:图示蓝色为围垦勾绘线;粉色为网箱勾绘线;绿色为海堤勾绘线;红色为底播养殖勾绘线;浅蓝色为桥梁勾绘线。Notes:Blue was for reclamation;pink was for cageculture;green was for seawall;red was for bottom seeding;light blue was for bridge.
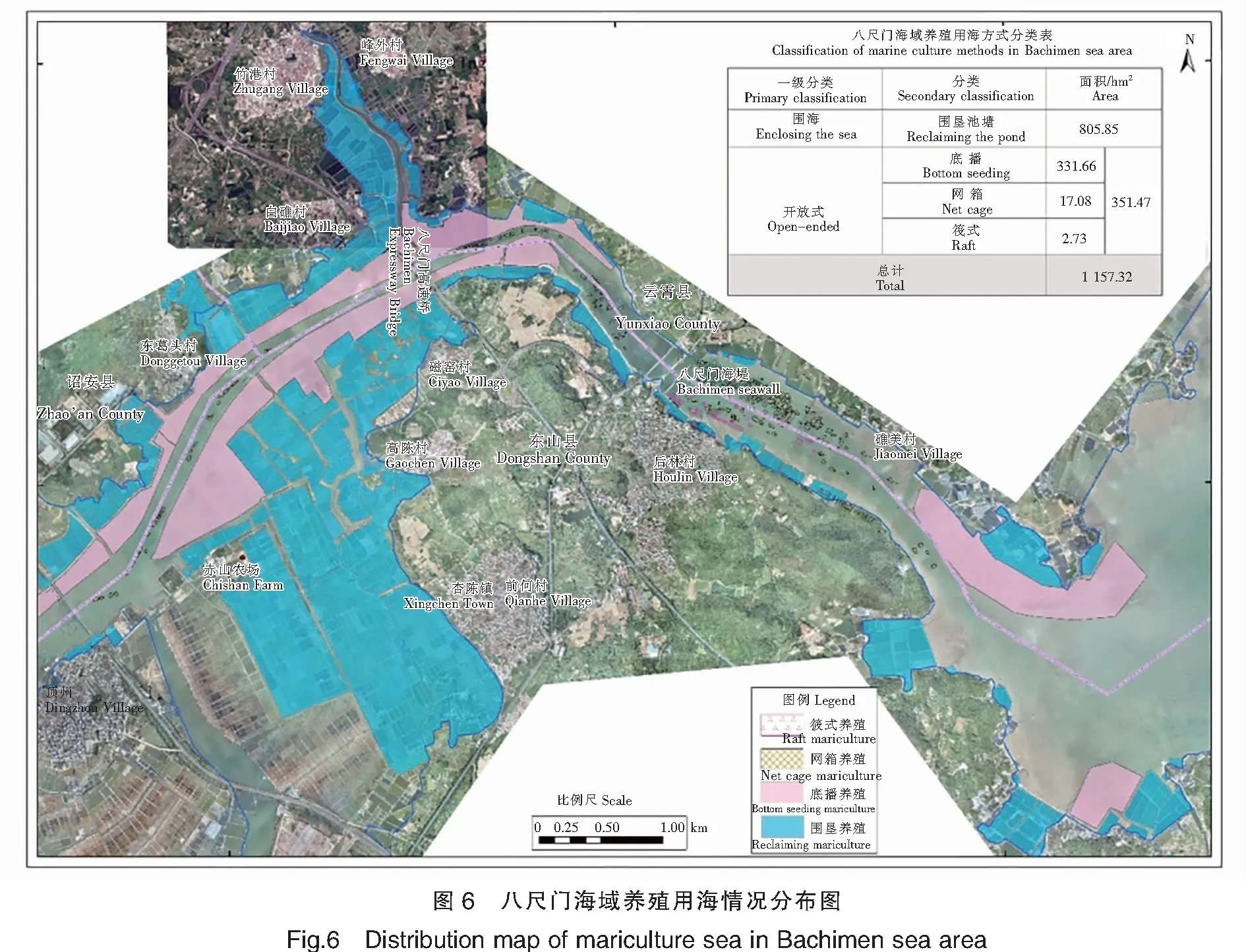
通过无人机航拍图叠加养殖专题线划图,并根据现场走访调查,形成了八尺门海域养殖用海情况分布图(图6)。图6清楚地反映出八尺门养殖用海的各用海方式组成和位置分布信息。经矢量数据统计分析,调查范围内八尺门海域养殖总面积为1 157.32 hm2,其中围垦池塘面积为805.85 hm2,占比69.63%;开放式养殖用海总面积为351.47 hm2,占比30.37%。
2.3 准确性验证
为验证无人机航拍结果准确性,本项目外业实地测量了东山县杏陈镇埕英村、高陈村和前何村、云霄县陈岱镇白礁村、诏安县四都镇山后村五宗以村集体为调查单元的养殖池塘,并对五组无人机和RTK实地测量数据进行了对比分析,结果见表1。经比对,面积差值在0.15%以内,平均差值为0.06%,表明航拍结果能够满足养殖用海调查的相关技术要求。

表1 无人机和RTK实地测量数据对比表Tab.1 Comparison table of UAV and RTK field measurement data
3 结论
1)传统养殖用海调查采用RTK人工测量,对围垦养殖池塘海堤、网箱、浮筏及滩涂外侧边界进行实地测量,工作量大、耗时耗力、效率低,尤其是海上浮筏、局部围垦拐点、浅滩无法精确定位,导致测量结果存在一定程度的偏差。而采用无人机正射影像测量,实现了高效、高精度围垦、网箱、滩涂等养殖方式用海界址点的定位,测量结果可视化程度高,同时方便今后权属界定及核对。从福建东山八尺门海域养殖用海航拍案例可以看出,无人机航拍成果能够清晰地反映近岸养殖现状,通过分析各养殖用海类型的特点,勾绘专题线画图,得到用海范围、面积等基本要素,精度能够满足养殖用海调查的相关技术要求。
2)海面上渔排、浮筏等养殖设施受潮流和潮位因素影响,存在一定的位移和高程变化,造成像控点布设难度较大。为了保障测量精度,在测区内岛礁、码头、海堤、近岸民房等特征建筑物上布置大量像控点,此外选择上空无遮挡平地,选用与地面颜色反差较大的材料标记,增设像控点。保障像控点能够最大程度地覆盖测区。
3)因测区面积较大,跨越丘陵、滩涂、浅海等区域,地形复杂,为了提高航拍拼接精度及效率,将测区分割成20个小区块进行分区航拍,每个测区均有像控点分布,且像控点尽量分布在分区边界上。
总体上,无人机航拍测量技术是一种新型海洋测绘方法,相对于传统测绘,具有较强的灵活性,能高效获取高分辨率的数据和信息。影响无人机海洋测绘的主要因素有像控点布置难度大、像点位移会造成影像模糊、航片拼接困难等。本文通过灵活布设像控点、分区测量及可视化航拍底图勾绘等技术手段,通过硬、软件结合的方式,有效地提高了无人机航拍技术在海上养殖用海测量调查中的效率和精度,为海洋测绘量提供了一种新的作业模式和解决方案。实际测量实践表明,无人机航拍技术在海洋测绘应用可以满足业务化生产作业的要求,具有较好的实用性,在我国广阔的海岸带区域具有很好的应用前景。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
建材发展导向(2021年22期)2022-01-18
科学(2020年4期)2020-11-26
时代邮刊·下半月(2020年9期)2020-09-23
红土地(2019年10期)2019-10-30
建材发展导向(2019年10期)2019-08-24
大科技·C版(2018年7期)2018-10-21
金桥(2018年6期)2018-09-22
小学生优秀作文(低年级)(2018年6期)2018-05-19
电子制作(2017年9期)2017-04-17