
重力/飞轮综合储能电机变流并网系统设计及运行特性
2023-01-06 02:43赵永明邱清泉聂子攀罗晓悦肖立业
储能科学与技术 2022年12期
赵永明,邱清泉,3,聂子攀,3,罗晓悦,肖立业,3
(1中国科学院大学 北京 100049;2中国科学院电工研究所 北京 100190;3齐鲁中科电工先进电磁驱动技术研究院 山东 济南 250000)
大容量储能设施可以提高电网调峰的能力,更好地实现“削峰填谷”;可以提高新能源发电的消纳能力,使分布式电源大规模并入电网成为可能,降低化石能源的消费占比。而新型重力储能的充放电时间、储能功率等都可以很好地满足电网需求,在提升电能质量、平滑新能源发电输出等方面有着突出的优势。
国内外对重力储能的电网应用研究尚处于初期阶段:世界上新型重力储能的类型主要有以下几种:美国ARES公司提出的机车斜坡轨道储能系统;瑞士Energy Vault 公司提出的混凝土重力塔储能系统[1];英国Gravitricity公司提出的基于废弃矿井的地下重力储能系统[2];中科院电工研究所提出的基于山体斜坡的多重物爬坡储能方案[3]、基于竖井的多重物提升储能方案等[4]。有学者将液压式重力储能与光伏电站结合形成混合系统,通过重力储能对光伏的功率补充和剩余电能存储实现系统发电功率和负荷平衡[5];或采用不同的算法实现重力储能和风电场的容量配置和输出优化以实现稳定并网,缓解新能源发电的不确定性[6-8]。但重力储能装置因其工作特性存在一定的时间间歇,并且单次释能时间较短,需要频繁启停才能实现长时间的发电供能。所以单重物的重力储能因其间歇性和波动等问题可能存在储能、放能不及时、不充分,造成电能的浪费。
为确保重力储能输出功率能够稳定并网,国内外学者提出利用多种储能方式结合构建综合储能系统:国外有学者研究利用超级电容补偿重力储能中重物加速和制动所需动能,再利用控制系统吸收重物下降过程中产生的特性功率浪涌,实现重力储能输出功率的有效控制与并网[9];国内有学者提出将重力储能与液流电池等结合,提出了以重力储能系统为主导,以化学电池为补充的分时分段控制策略,实现输出功率稳定且便于调节,避免单独使用重力储能模块的频繁启停,提高各组件寿命[10-11]。由于重力储能的输出功率范围较大,所以需要为重力储能补偿较大容量的电池储能,以满足其不间断满功率输出的需求。但是化学电池本身存在能量密度较低,循环放电次数较少,寿命较短,可能造成环境污染,对于极端环境的适应性较差等问题。这些不足会造成整个储能系统的成本较高,维护更换的代价较大,不利于重力储能技术大规模投入建设运行。
在目前的研究中,重力储能系统可用于电网调峰和二次调频,而飞轮储能系统可用于电网的一次调频和功率补偿。同时飞轮储能的技术成熟度较高、单机成本较低,机组阵列的研究应用使得飞轮储能机组整体输出功率可以满足重力储能机组的需求;另外,飞轮储能也可作为重力储能机组的备用容量,提高整体系统的能量存储能力和使用寿命,降低单位电能的存储成本。因此针对目前卷扬提升重力储能因多重物切换导致功率的间歇性和波动性问题,可以采用飞轮储能来平滑重力储能的输出功率。在重力储能机组发电时,飞轮储能机组提前充电;在重力储能机组处于间歇状态时,飞轮储能机组接入,无间断完成相同功率的输出。
国内外对飞轮储能的电网应用研究较为成熟:德州农工大学李晓军总结了近些年飞轮储能技术的相关研究,分析飞轮和电机的材料、结构等对飞轮系统性能的影响[12];国内学者提出飞轮储能系统在并网风电场应用时的充放电功率、直流母线电压和频率等参数的控制策略,使飞轮储能在风电场中发挥功率平滑和调频作用的控制策略更为完善[13-15]。
以基于卷扬提升机的竖井重力储能系统为例,为平滑多重物切换导致功率的间歇性和波动性,本文提出了以重力储能为主,飞轮储能为辅的综合物理储能系统设计和控制策略。综合系统分为机侧和网侧电路:机侧电路通过直流母线将重力和飞轮储能系统各自的机侧电路连接,机侧变流器的控制由两种储能系统各自的控制策略和电路实现;网侧电路将两系统的网侧电路和网侧变流器合并,并使用相应的控制策略控制网侧变流器。机侧和网侧变流器的控制策略均采用双闭环控制的方法实现电压、电流的稳定控制;网侧电路采用LCL滤波器实现网侧电流质量的提高和高次谐波的衰减。本文首先对重力和飞轮储能系统的工作原理、组成部分、控制方法等进行分析,构建重力和飞轮储能电机并网系统模型;然后仿真分析两种储能系统在不同运行工况下机侧和网侧参数的变化;最后设计综合物理储能系统结构和控制策略,并仿真研究其运行特性。
1 重力储能系统
根据重力储能系统高载重、低速率的特点,低速大扭矩永磁同步电机是较好的电机选择。对于这类电机的控制,中科大梁琼文[16]提出低速平稳控制算法,利用自适应卡尔曼观测器提高大扭矩电机低速运行时的平稳性;中科大李长磊[17]对永磁同步电机在低速状态下稳定运行控制策略进行研究,并采用DSP进行了实验测试;天津大学纪秉男[18]提出电流环和速度环主协控制策略和二自由度PI控制器的速度无超调控制策略,以实现速度无超调运行。
对于重力储能系统用低速大扭矩永磁同步电机的控制要求精度较高,转速稳定,负载转矩恒定,控制电路简单,故选用id=0的矢量控制方法[19-20]。
网侧变流器控制策略主要是保证直流母线电压保持稳定,进行电压定向的矢量控制策略,采用直流母线电压外环、网侧电流内环的双闭环控制方法,以保证直流母线电压稳定。
将机侧控制系统和网侧控制系统结合,通过直流母线将二者连接起来,设计出适合低速大扭矩永磁同步电机并网系统,机侧变流器采取转速外环、电流内环的控制策略,网侧变流器采取电压外环、电流内环的控制策略,具体控制框图如图1所示。
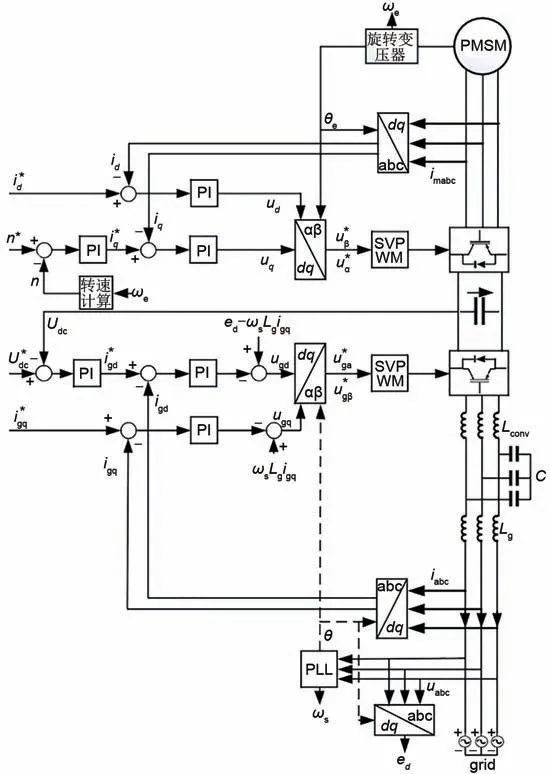
图1 重力储能系统并网运行阶段控制框图Fig.1 Control block diagram of GESS at grid-connected stage
由于储能系统并网控制采用LCL并网控制滤波电路有利于逆变器在较低开关频率下获得高质量的进网电流,对高次谐波衰减效果显著。因此需要根据并网系统参数确定LCL滤波器中参数的值[21]。
由于电机转速方向决定了电机的工作状态,所以通过调整电机的转速方向即可将电机在电动机/发电机两种工作状态之间切换。实际电机加减速仿真时间长达10 s[22],本节重在研究控制策略的可行性,故仿真时间尽量缩短,设置重力储能电机的转动惯量小于实际值。基于上述控制框图,在MATLAB 中建立永磁同步电机并网控制系统模型,并进行发电和放电的仿真分析。重力储能电机参数如表1所示,重力储能网侧变流器控制系统及滤波器参数如表2所示。
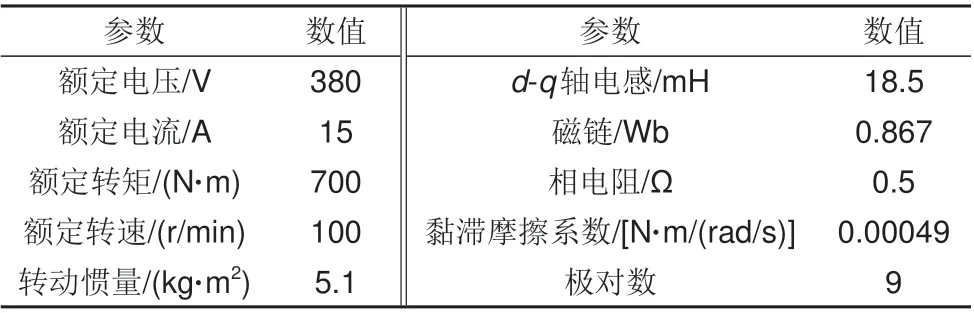
表1 重力储能电机参数Table 1 Parameters of gravity energy storage motor

表2 重力储能网侧变流器控制系统及滤波器参数Table 2 Parameters of GESS grid-side converter control system and filter
在t=2 s 时转速反向,电机从电动机模式转为发电机模式,网侧和机侧变流器的工作状态也发生转变。直流母线电压的变化波形如图2所示。

图2 直流母线电压波形Fig.2 Waveform of DC-bus voltage
如图2所示,在初期,网侧变流器工作于可控整流状态,机侧变流器工作于逆变状态;在t=2 s之后,网侧变流器工作于可控的逆变状态,机侧变流器工作于整流状态。从图中可以看到:在初期,直流母线电压经过短时间的调节,稳定在设定值700 V,在t=2 s后,同样迅速稳定在设定值,实现了直流母线电压的无差跟踪,满足并网控制要求。
电机转速变化波形如图3所示,在初期,电机正转从零到额定转速的超调量基本为0,并且在之后可以稳定在额定转速;在t=2 s时电机反转,转速迅速降为负额定转速并保持转速稳定,说明转速外环和电流内环这组双闭环控制器具有良好的动态和稳态特性,能够满足永磁同步电机的转速控制要求。

图3 转速波形Fig.3 Waveform of speed
图4(a)是电机正转时网侧A相电压和电流波形图,可以看出:此时网侧相电压和相电流相位差180°,功率因数为1;图4(b)是电机反转时网侧A相电压和电流波形图,可以看出:此时网侧相电压和相电流同相位,功率因数为1,满足系统控制要求。由图可知,电机正转时相电流要大于电机反转时的相电流,这是由于系统模型存在一定的功率损耗,所以从电网输出的功率要小于回到电网的功率。
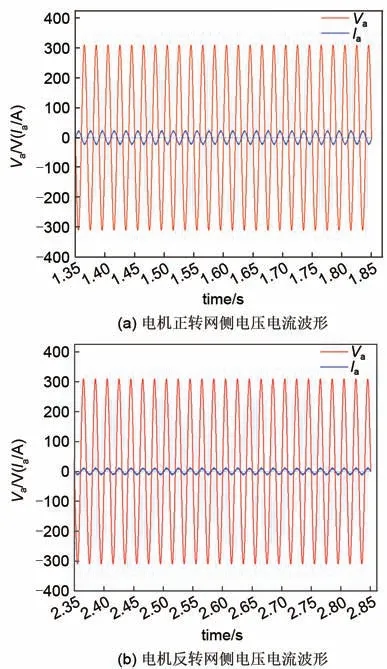
图4 网侧电压电流波形Fig.4 Waveform of grid-side voltage and current
2 飞轮储能系统研究
根据飞轮储能系统高转速、快响应的特点,高速永磁同步电机是较好的电机选择。对于这类电机的控制,宋兆鑫[23]、欧跃雄[24]提出了飞轮储能控制采用双闭环的控制策略,通过改变闭环参量实现飞轮储能系统在不同工况间的切换;中国科学院电工研究所刘文军等[25]在网侧电路中采用LCL滤波器实现电流质量的提高和高次谐波的削减,同时提出采用并网电流和电容电流双闭环控制策略,抑制系统振荡,提高系统稳定性;清华大学戴兴建等[26]对大功率的飞轮储能系统进行实验测试,在充电过程中采用了弱磁、转速和电流的双闭环控制策略,放电过程中采用电压闭环和电流前馈控制策略。
根据对永磁同步电机矢量控制方法的分析,确定飞轮电机采用id=0矢量控制策略。但飞轮储能系统的电机控制需要更迅速,且通过转速的加减实现功率的存储和释放,所以电机采用的矢量控制策略在启动阶段先采用恒转矩控制后采用恒功率控制,在并网阶段采用恒功率控制。考虑到飞轮电机需要运行在三种工作状态下,在不同工作状态下其矢量控制的参量需要做出相应的变化,以保证飞轮电机能在相应的工作状态中实现相应的功能。因此机侧变流器和网侧变流器的双闭环反馈控制参量随工作状态的不同而存在差异[23]。
飞轮储能的并网控制框图如图5所示,在不同运行工况下变流器采用的控制方法如图5所示[27-28]:
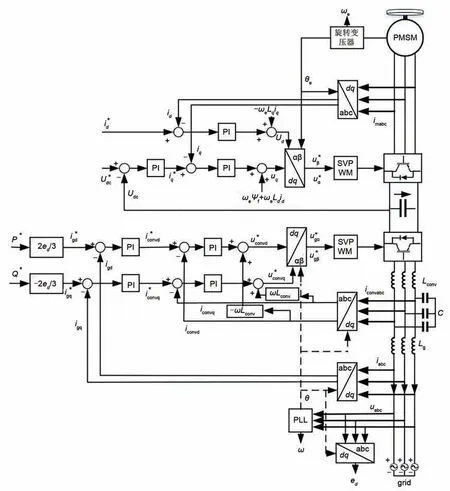
图5 飞轮储能系统并网运行阶段控制框图Fig.5 Control block diagram of FESS at grid-connected stage
(1)在充电阶段,网侧变流器采用电压外环、网侧电流内环控制策略,机侧变流器采用转速外环、电机定子电流内环控制策略,用于维持直流母线电压稳定,并将飞轮转速充电至设定转速;
(2)在待机状态,网侧变流器采用网侧电流外环、变流器侧电流内环控制策略,机侧变流器采用直流母线电压外环、电机定子电流内环控制策略,以稳定直流母线电压和转速。此时网侧变流器未收到并网功率指令,系统机侧和网侧间无功率交换。当系统收到并网功率指令时,系统由待机转为并网状态;
(3)在并网状态,网侧变流器采用基于功率指令的网侧电流外环、变流器侧电流内环控制策略,机侧变流器依旧采用直流母线电压外环、电机定子电流内环控制策略,用于稳定直流母线电压,控制直流母线和飞轮电机实现功率交换。
当功率指令P*为正且大于系统总功率损耗时,系统工作于并网充电状态,功率由电网流向飞轮电机;当功率指令P*为负时,系统工作于并网放电状态,功率由电机流向电网;当功率指令P*为0 时,系统工作于待机状态,无功率交换[25]。无功功率参考值Q*设置为0以满足单位功率因数并网的要求。
基于上述控制框图,在MATLAB中建立飞轮储能电机并网控制系统模型,并进行发电和放电的仿真分析。本节重在研究控制策略的可行性,故仿真时间尽量缩短,设置飞轮电机转动惯量小于实际值[24]。飞轮储能系统电机参数如表3 所示,飞轮储能网侧变流器控制系统及滤波器参数如表4所示。

表3 飞轮储能系统电机参数Table 3 Motor parameters of FESS

表4 飞轮储能网侧变流器控制系统及滤波器参数Table 4 Parameters of FESS grid-side converter control system and filter
(1)充电、待机和并网放电阶段
在t=1.5 s时设并网有功功率指令P*=-10 kW,飞轮储能系统从待机状态转为并网放电状态,充电、待机与并网放电阶段系统参数的变化如图6所示。
由图6(a)可知,在飞轮储能系统充电阶段,飞轮加速至设定转速3600 r/min,然后系统进入待机运行状态;在充电至待机的状态切换过程,直流母线电压能稳定在参考值700 V。由于系统黏滞阻尼系数较小,飞轮转速在待机状态下基本恒定;在充电和待机阶段,飞轮系统并没有并网,此时电网侧电压和电流并不同相位,二者之间存在一定的相位差。
由图6(b)可知,当输出并网功率指令出现时,飞轮储能系统由待机状态转为并网放电状态,经过约1/2 周期后,并网电流完成与电压的相位同步。在切换过程中,直流母线电压基本稳定在700 V,并网电流从接近0增大到一定值。
由图6(c)可知,放电时输入到电网的有功功率为10 kW,功率因数接近1,与控制策略的理论结果相符合。
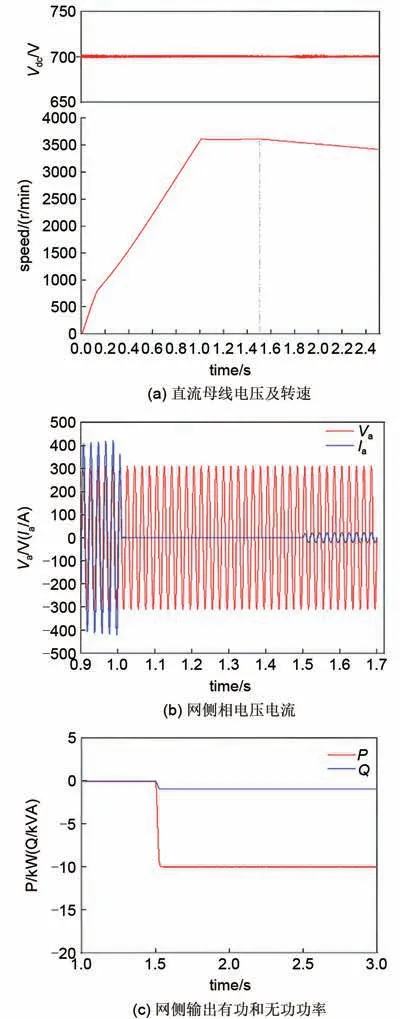
图6 并网待机放电参数波形Fig.6 Waveforms of the parameters in grid-connected stand-by and discharge mode
(2)并网放电和并网充电
在转速降低到一定数值时,将并网功率指令设置为P*=10 kW,此时飞轮储能系统从并网放电状态转换为并网充电状态,并网放电与并网充电阶段系统参数的变化如图7所示。
从图7可以看到,在并网功率指令从P*=-10 kW变为P*=10 kW后,经过约1/2周期,并网电流与电网电压的相位差从0°变为180°;在切换过程中,直流母线电压出现小幅变化,但迅速恢复到700 V;在放电和充电过程中,网侧输入和输出的有功功率为10 kW,功率因数接近1,当转速升到设定值时,系统进入待机状态。

图7 并网充电-放电参数波形Fig.7 Waveforms of the parameters in grid-connected charge and discharge mode
3 综合物理储能系统研究
3.1 拓扑结构设计
针对永磁同步电机驱动的竖井重力储能和永磁同步电机驱动的常规飞轮储能匹配运行的综合系统和控制策略,提出了如图8所示的综合储能系统结构意图。对于综合储能系统来说,针对GESS 和FESS的机侧变流器和电机控制相互独立,通过控制策略进行两部分系统的功率分配,保证输出到电网的功率保持稳定。两部分系统共用直流母线、网侧变流器以及滤波器等电路,实现维持直流母线电压稳定和网侧变流器的正常控制。其具体的控制框图如图9所示,其中各个电机的控制策略、变流器的控制电路结构以及参数设置见第1、2部分。

图8 综合物理储能系统示意图Fig.8 Schematic diagram of integrated physical energy storage system
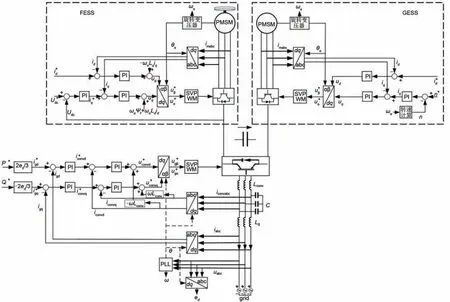
图9 综合物理储能系统并网运行控制框图Fig.9 Control block diagram of the integrated physical energy storage system at the grid-connected stage
本部分重在研究控制策略是否可行以及综合系统运行是否正常,故仿真时间尽量缩短,设置飞轮电机转动惯量小于实际值,从而缩短电机加速和减速时间。其中综合系统模型的结构和储能量参数如表5所示。

表5 综合系统模型的结构和储能量参数Table 5 Parameters of structure and energy storage for integrated system model
3.2 匹配运行特性
综合考虑重力储能和飞轮储能的研究,设定t=1.5 s 为系统向电网放电的起始时间。飞轮储能在t=1.5 s 之前已经处于待机状态,然后在t=1.5 s 时开始根据系统功率指令输出功率,以补偿仿真中重力储能系统减速时间(<1 s)的功率输出间歇。
设置输出到电网的功率为10 kW,在0~1.5 s为综合系统的启动和待机阶段,当转速达到设定值时,重力储能系统以额定功率从电网吸收电能,飞轮储能系统则进入待机状态,等待功率指令出现;在t=1.5 s 时,给出功率指令向电网输送10 kW 的电能,此时重力储能系统开始减速至反转到额定转速实现放电,而飞轮储能系统供给重力储能从储能到释能期间所需电能,保证整个综合系统向电网稳定输送10 kW的电能;到t=4.4 s时,功率指令转为电网向储能系统输送10 kW电能,实现能量存储。
基于上述控制框图和控制策略搭建MATLAB仿真模型,综合系统各参数变化曲线如图10所示。

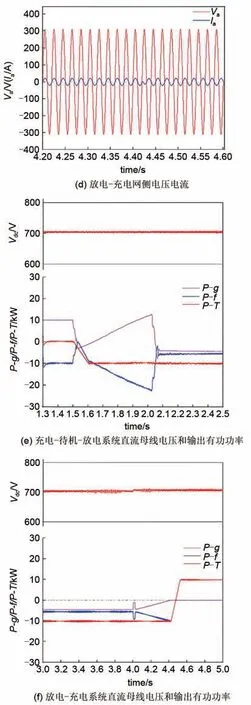
图10 不同工作阶段的参数波形Fig.10 Waveforms of the parameters at different stages
如图10(a)~(b)所示,重力储能系统充电阶段,电机转速加速至额定转速100 r/min,然后持续从电网吸收电能进行存储,到t=4.0 s时开始减速;飞轮储能系统在充电阶段,飞轮转速加速至3600 r/min,之后由于保持整体系统的待机状态,需要补偿重力储能系统的消耗,实现整体系统与电网之间没有能量交换,所以飞轮转速会下降以满足系统功率需求。
如图10(c)~(d)所示,在电机启动-待机-放电以及放电-充电过程中,网侧相电压电流也会随着运行阶段的不同而出现相应的变化,具体分析见第3节内容。
图10(e)~(f)所示,其中P-g表示综合系统中重力储能侧的输入功率,P-f表示综合系统中飞轮储能侧的输入功率,P-T表示网侧向综合系统输出的有功总功率,正值表示从网侧吸收功率,负值表示向网侧输出功率。从图中可以得到,P-T=P-g+P-f。
在系统运行工况改变时,直流母线电压会出现小幅变化,但很快会回复到设定值。在0~1.2 s,系统处于启动阶段;在1.2~1.5 s,系统处于待机状态,此时P-T=0,但P-g大于0,故飞轮储能系统在补偿重力储能系统吸收的功率,即P-f小于0;在1.5~4.0 s时,系统处于向电网放电阶段,经过因转速变化导致的暂态过程,储能机侧输出总功率均保持稳定在10 kW;在1.6~2.1 s 期间,当重力储能侧的功率P-g出现间歇和波动时,飞轮储能侧能迅速补偿功率P-f以保证输出到网侧的有功总功率P-T不变;t=4.0 s时,重力储能输出功率开始下降,t=4.4 s时,电网向综合系统放电,重力储能电机虽未减速至零,但其由于控制电路内部损耗,故向电网输送功率降为零;此时飞轮储能系统吸收功率充电,P-g=0,P-f=P-T=10 kW且保持稳定,从而验证了综合物理储能系统的拓扑结构和控制策略准确可靠。
4 结论
为平滑卷扬提升重力储能系统中多重物切换导致功率的间歇性和波动性,本文提出以竖井重力储能为主,飞轮储能为辅的综合物理储能系统设计和控制策略。通过对重力和飞轮储能系统的工作原理、控制方法以及关键组件等的研究,建立了重力和飞轮储能并网系统模型,并仿真分析两种储能系统在充电、待机和放电工况下,机侧和网侧参数的变化,确定了两种储能系统各自运行控制策略的可靠性;最后建立了综合物理储能系统仿真模型,设计了系统的能量管理和控制策略,并对其在不同工况下的运行特性进行了仿真研究。仿真结果验证了综合物理储能系统的结构设计和相应控制策略的可行性。
猜你喜欢
河北农机(2021年12期)2022-01-06
科学技术创新(2021年21期)2021-07-30
铁道机车车辆(2021年3期)2021-07-12
科技信息·学术版(2021年7期)2021-01-10
煤矿机电(2020年5期)2020-11-02
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
电子制作(2019年10期)2019-06-17
课程教育研究·学法教法研究(2018年20期)2018-08-11
时代汽车(2018年12期)2018-06-18
