
基于支持向量机激光技术提取电力线信息的研究
2023-01-05 07:52裴爱根
粘接 2022年12期
裴爱根,张 洋,黄 涛,韩 超,肖 楠
(国网江苏省电力工程咨询有限公司,江苏 南京 210003)
建设智能电网,需要具有一定优势的高压输电线路作为基础,以达到输送电能的目的。现有的电力线生存环境复杂,受到恶劣天气的影响,经常发生输电线路和元件损坏情况。在电力线的走廊中,如果电力线与周围设备距离较近,会引起放电,从而发生跳闸,对于人们的用电安全十分不利。电力部门如果无法及时获取跳闸原因,势必会给人们的安全带来严重的威胁。因此,为了保证输电线路的安全稳定运行,电力部门要经常性的对输电线路进行检查,消除隐患,防止意外事故的发生。随着遥感技术的发展,逐渐取代了人工电力巡检方式。基于遥感技术的电力线走廊可以自动检测,借助无人机或者有人机这些巡检平台,对输电线路进行扫描检测。机载激光雷达作为一种区别于其他技术的遥感设备,其功能强大,以激光脉冲作为信号获取的媒介,可以穿透植被获取电力的三维坐标,通过室内的方式精准快速的测量电力线到植被之间的安全距离,从而确定设备是否满足安全运行的标准。
1 机载激光雷达技术
机载激光雷达是一种新型的航空传感器,由多种复杂的系统组成,具体如图1所示。机载激光雷达需要通过特定的形式进行工作[1],才可以发挥出其功能。机载激光雷达的工作原理:当激光发生器向地面发射激光时,会立即检测出目标发射的信号,并对信号进行转换,再对其进行存储;通过测量光信号,得到计算目标点与系统之间的距离:

图1 机载激光雷达系统[3]Fig.1 Airborne lidar system[3]
(1)
式中:c为光速;D为目标到系统的距离。
激光作为一种发射角小且方向性好的光源,当激光在传播的路径上遇到不同的物体时,机载激光雷达系统都可以获取数据;并通过侧边角进行点定位,获取高精度的三维点云信息,并进行数据记录[2]。
2 点云数据组织和特征
2.1 组织方式
2.1.1虚拟格网
虚拟格网的存在,是将点云所在区域进行网格划分,并将三维激光点投影到所管辖平面中,让每一个格网都可以存储在自己格网中,通过行列序号对格网进行索引[4];具体格网组织形式如图2所示。
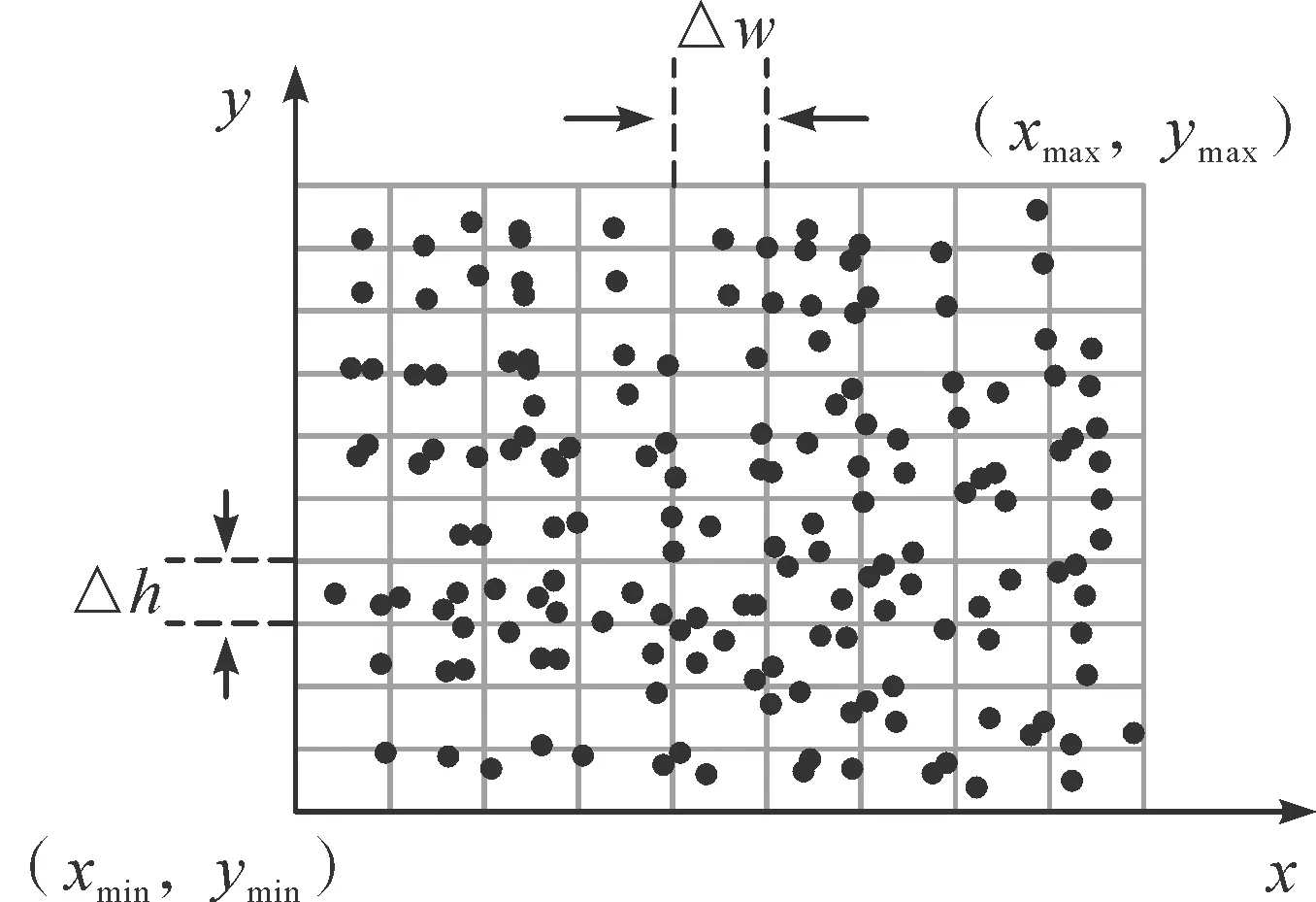
图2 虚拟格网点云组织Fig.2 Virtual grid point cloud organization
通过设置格网的距离和原点,获取到行号和列号:
(2)
式中:ymin表示纵坐标最小值;xmin表示横坐标最小值;Δh、Δw分别表示格网的高度和宽度。
2.1.2不规则三角网
不规则三角网如图3所示。

图3 不规则三角网点云组织Fig.3 Irregular triangle network point cloud organization
由图3可以看到,其利用永不重叠的三角形,将整个测区进行覆盖,通过三角形的顶点可得出。对于离散型的数据,具有显著效果;结构特殊性,也为数据分布带来较强的适应性功能[5]。
2.2 点云数据特征
为了获取更加完整的地物信息,需要对机载激光雷达点云数据进行分类[6]。
(1)激光雷达所对应的数据是地物,对于离散型数据而言,需要通过三角网的脚点分布获取准确的三维结构,使其可以在提取空间上变得更加快捷。点云的数据较为离散,可以使用相同的平面坐标,这更有利于对地物地形进行描述;
(2)对于不同的区域,其点云密度的分布情况也略有差异。激光点云数据的分布容易受到来自多种外界因素的影响,使得激光扫描的角度与速度无法平均。当处于统一区域下,会发生密度差异;
(3)对于回波次数与回波强度的多次记录问题,激光雷达点云数据所涵盖的三维坐标,可以达到提高密度的目的;
(4)光谱信息的缺乏,容易影响激光雷达系统的获取准确性。虽然在提取空间上具备一定优势,但容易忽略地物对象特征中的光谱信息。
3 基于支持向量机的机载激光点云提取方法研究
传统的电力线走廊点云数据,包含多种信息,如电塔、地面、植被等。机载激光雷达电力线点云提取,则是对传统的电力线走廊点云数据进行简化,通过获取电力线点云的方式达到提取电力线数据的目的。提取电力线点云数据,可以很好地改善电力巡检的工作效率。在机载激光点云处理中,机器学习得到了广泛应用,与传统点云分类方法相比,机器学习算法对于复杂的点云数据,可以处理的更加快速和准确。支持向量机学习算法需要通过提取电力线的点云数据[7],构建特征向量,其目的是为了获取最优分类参数,并通过实验进行验证,其实验步骤如图4所示。

图4 电力线点云提取步骤Fig.4 Steps of power line point cloud extraction
3.1 支持向量机
支持向量机(SVM)[8]建立在统计学习理论的基础上,根据有限的样本信息,即在复杂的模型中寻找最佳位置获取泛化能力。简而言之,SVM为一种2类问题分类模型,也是一种线性分类器,可以将分类问题转化为凸2次规划问题。SVM在解决非线性或者高维模式识别中具有更加明显的优势。在线性可分中,SVM会寻找分类间隔最大的分类面;在不可分中,会引入松弛变量,使用核函数改变维度空间以增加可分性。以线性可分支持向量为例,展开对SVM的基本理论介绍。在图5中,有2大类数据,H平面称为最优超平面,H1、H2为支持向量[9]。
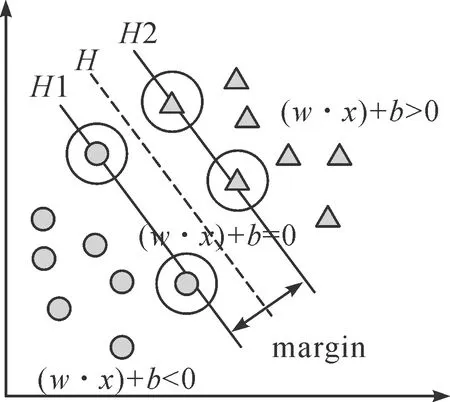
图5 线性可分支持向量机Fig.5 Linearly separable support vector machine
H可以用下列函数表示:
{(x1,y1),(x2,y2),…(xn,yn)},xi∈Rn,yi∈
{-1,+1},i=1,2,…,n。
当f(x)=0时,x在超平面H上;当f(x)>0时,y=x+1;当f(x)<0时,y=-1。
f(x)=ωTx+b
(3)
式中:ω表示参数向量;b表示平移向量[10]。
H1、H2到H的距离表示为:
(4)
为了将2大类数据进行分离,保持最大距离,使r最大化,且满足下列条件:
(5)
转化后得到:
(6)
式(4)中的目标函数是二次的,属于凸二次规划问题,可以直接利用QP优化计算包进行解决;或者添加拉格朗日乘子,利用拉格朗日函数,将问题进行转化,从而更有助于原问题的求解[11]。转化后得到:
(7)
求导可得:
(8)
令上述公式分别为0,代入到式(5)中,得到:
(9)
因此,所得到的求解目标函数表示[12]:

(10)
3.2 点云特征的提取
使用机器学习方法对机载激光雷达点云数据进行分类过程中,首先需要构建特征向量空间,其数量和优劣性都会对分类的结果产生影响。提取特征的数据不能以数量为主,如果数量过多,则消耗的时间较多,影响分类精度;如果数量较少,则分类的效果无法得到保证。因此,在进行特征提取时[13],一定要严格控制特征提取的数量。本文采用点云的直接特征和间接特征2种邻域方式提取点云间接特征。
3.2.1点云直接特征
1)回波数
激光引脚不仅可以记录单个回波,还可以记录经常发生的多个回波;在地面、屋顶等无法穿透的物体上,多由高植被产生回声。
2)回波号
多次回声分为一次回声、中回声和最后一次回声。第1个回波通常由电力线组成,树冠、建筑边缘、中间的回声往往是由植被内部的树枝产生的;最后的回声贯穿其间它经常在树下的地面上和建筑物的边缘上发现[14]。
3)回波强度
虽然使用回波强度很难对地物进行分类,但结果在一样的区域的电力线材料大都相同,表面的强度信息通常是稳定的;而电力线这种材料与地面、塔架、植被和建筑物的材料有很大的不同。因此,回波强度作为电力线提取的一个重要特征,对于地物分类还是有一定的帮助。
3.2.2点云间接特征
1)局部高程差
局部高程差可以在宏观角度上反应点云的高程变化,对于高植被和建筑物的边缘而言非常敏感。
2)局部高程标准差
局部高程标准差相比局部高程差而言,对地物的粗糙度表达的更为细腻,可以真实的反应出邻域内所有点云在微观上的变化[15]。
3)相对高程
相对高程对于缩小地形起伏波动有一定影响,主要通过指定点与圆柱体领域内的最低高程相减的结果而得到,其计算公式:
RH=H-HCMIN
(11)
3.3 实验与结果分析
3.3.1实验平台
采用Visual Studio(C++)开发环境,LiDAR_Suite数据处理软件进行开发。使用RieglLMS-Q560激光扫描与获取输电线路扫描数据,其数据如表1所示[16]。

表1 扫描数据Tab.1 Scanning data
由表1可知 ,地形较为复杂,且起伏不平,因此将试验的数据分为训练模式和测试模式2大部分。2种训练模式的数据中都涵盖了地面、植被、电力线以及电塔等事项。
3.3.2确定邻域半径
点云的间接特征提取有一个前提,即需要先设定邻域范围。因为邻域的半径对于特征提取十分敏感,如果邻域的半径相差较大,会影响最终的分类精度[17]。因此,对不同的邻域半径进行实验,确定最优的领域半径十分重要。通过设定多个邻域半径,在每一个半径下构建特征空间,然后进行分类模型的训练。最后对测试的样本进行预测,结果如图6所示。

图6 测试样本结果Fig.6 Test sample results
由图5可以看出,当半径为3.5 m时,电力线分错的点数整体下降,因此选择3.5 m作为最佳的邻域半径。这更有利于构建SVM分类空间[18]。
3.3.3支持向量机提取电力线点云
使用支持向量机进行点云分类时,首先需要对整个数据集进行划分,将其划分为训练和测试2大部分:一是利用训练集部分所生成的模型;二是对测试集部分进行分类实验。本研究最终的目的提取电力线点,因此可以将电力线点云单独作为一类,其余的作为另一类。在整个实验过程中,要根据提取的点云特征进行验证,以实数向量的形式进行表达,根据特征大小,对提取的特征进行归一化处理。将每一个特征都集中放到同一个区间内,可以有效避免因数值较大而产生过分分配数值小的情况,还可以降低支持向量机中核函数计算数据的复杂度。
使用RBF核函数,确定参数,在初始的数据上使用五折交叉验证。参数设定为(C,γ),其中,C的取值范围为:(2-5,2-3,…215);γ的取值范围为:(2-15,2-13,…23)。采用grid.py搜索工具,在3.5的最佳邻域半径下,确定(C,γ)的值。采用最佳参数,对训练集进行训练,得到分类模型后对2部分的测试数据进行测试,具体流程如图7所示[19]。

图7 试验流程Fig.7 Test process
本研究所采用的算法,可以准确的进行地物特征的分类,在电塔塔身、电力线交接的地方,容易出现分类错误。因为这些区域的联系紧密,而且点的特征相似,容易出现分类错误。支持向量机对于电力线的分类效果明显,对于分类出的电力线点基本上都维持原来的形态和结构。为了可以定量的分析分类的结果,需要对分类的结果进行评价,具体如表2所示。
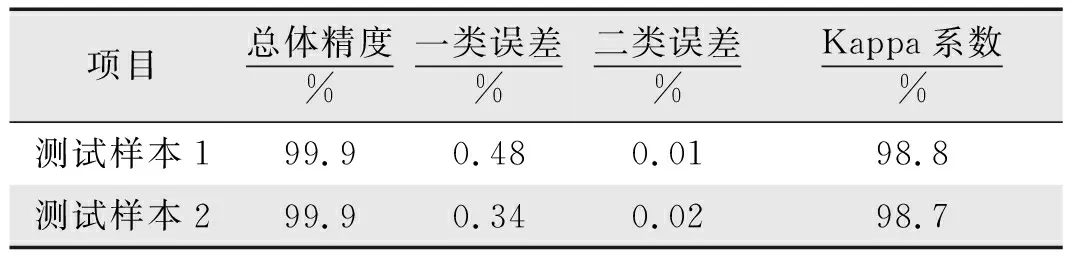
表2 测试数据精度评价结果[20]Tab.2 Test data accuracy evaluation results[20]
由表2可以看出,地形环境差异较大的2组测试样本,其总体精度和Kappa系数的精度评价结果较高。这也更加体现出了使用支持向量机进行点云特征提取所得到的有效性。
4 结语
本文对提出结合区域增长的SVM机载激光雷达功率点云提取方法进行了阐述,全面介绍了SVM算法的基本理论;然后结合机载电力线走廊特征点云数据,直接和间接提取电力线分类有效点云特征构建特征空间。最后,通过实验进行研究,主要包括4个部分:点云邻域特征半径确定实验、支持向量机提取电力线实验、电力线区域生长实验、点云密度和电力线提取精度实验;通过可视化和定量分析方法,选取总体分类精度、类型误差、2次误差和Kappa系数的精度对实验结果进行了分析,结果表明,提出的算法对电力线走廊数据的提取具有较高的精度。
猜你喜欢
农业工程学报(2022年7期)2022-07-09
电讯技术(2022年3期)2022-03-27
逻辑学研究(2021年3期)2021-09-29
中国科学数据(中英文网络版)(2020年4期)2021-01-20
华南地震(2020年3期)2020-10-20
空间科学学报(2020年6期)2020-07-21
铁路计算机应用(2020年5期)2020-06-02
计算机应用与软件(2018年12期)2018-12-13
中国科学院大学学报(2018年5期)2018-09-10
电子制作(2016年21期)2016-05-17
