面向载人月球探测的三体周期轨道应用方案分析
2023-01-05 05:28赵建贺
载人航天 2022年6期
曾 豪,彭 坤,田 林,赵建贺,刘 扬
(北京空间飞行器总体设计部,北京 100094)
1 引言
地月、日地等不同三体系统中存在5 个平动点,基于平动点轨道可完成多种不同的深空任务,并具有其特有的优势:①月球背面连续通信。飞行于地月系统L2 平动点附近Halo 轨道上的卫星可以保证地球与月球背面的持续通信,并且能够与L1 点附近轨道上的航天器组建点对点的通信网络,从而增大对月球表面的覆盖面积,进而支持月球背面着陆任务的导航与数据中继;②构建航天器航行中转站与空间望远镜。地月系统L1、L2平动点之间存在着低耗能的转移轨道,航天器只需消耗极少的能量,便可完成平动点轨道之间的转移,并可在深空行星探测任务中增加发射窗口;③行星际低能转移。平动点轨道存在着稳定流形与不稳定流形,可有效解决深空探测任务中存在的飞行时间长与燃耗多等问题。通过流形拼接技术构造出低耗能的转移轨道,为未来太阳系内各个行星之间完成物资运输提供方便。因此,围绕平动点附近的三体周期轨道及其流形结构在科学研究与工程应用中受到广泛关注[1]。
ARTEMIS 任务[2]、嫦娥四号任务[3]及NASA提出的月球轨道平台门户计划[4]均采用地月空间平动点轨道。其中嫦娥四号中继星任务轨道为L2 点Halo 轨道,月球轨道门户计划则将在月球附近的近直线Halo 轨道(Near-rectilinear Halo Orbit,NRHO)部署空间站,最终形成地月空间物资转运及深空探测的飞行器中转站。
面向月球探测任务轨道方案设计,李桢等[4]基于精确轨道动力学模型,研究了满足共面交会约束的发射窗口,分析了地月转移轨道特性。王书廷等[5]为提高探月任务的安全性和效费比,提出了一种利用重复使用地月转移级往返近地轨道空间站进行载人月球探测的任务模式,并进行多方案对比,确定了可重复使用的优选方案。
针对地月三体周期轨道在载人月球探测中的应用,彭祺擘等[6]系统梳理了月球附近可用于部署空间站的停泊轨道类型,分析了不同类型轨道的能量需求、登月任务支持性、空间环境等特点。Whitley 等[7]系统研究了近直线NRHO 轨道往返地球、月球的速度增量与飞行时间等关键参数的变化特性,并对全月面可达区域进行分析;曾豪等[8-9]分别针对Halo 轨道、DRO 轨道与NRHO 轨道提出了支持月球探测任务的往返转移轨道设计方法,并对不同轨道幅值、近月点轨道约束对任务时间与燃料消耗的影响进行了研究;彭坤等[10]对比直接往返的登月飞行模式,开展了基于LEO、GEO、L2 点Halo 轨道等6 种不同轨道部署空间站的登月飞行模式优劣比较分析,综合结果表明,运行于L2 点Halo 轨道的空间站载人登月模式能够较好地满足速度增量、测控条件、任务窗口等指标要求,但其未考虑NRHO 与DRO 轨道的影响;高启滨等[11]为解决登月方案中交会对接窗口选择难等问题,提出了基于地月L1 点的载人登月飞行方案,能够在一定程度上降低登月任务飞行器的燃料消耗。此外,NASA 于2004年提出采用地月L1 点与L2 点交会的载人登月飞行模式[12]。曹鹏飞等[13-14]对低运输成本的未来地月L2 点Halo轨道空间站补给任务转移轨道问题进行了研究,分析了不变流形、不同插入点相位与幅值对燃耗的影响。
由于三体轨道作用的日益凸显,结合三体周期轨道开展载人月球探测任务将成为潜在方案。本文针对平动点Halo 轨道、月球附近的近直线NRHO 轨道及质心会合坐标系xy平面DRO 轨道,分析三体周期轨道在登月任务中的应用价值。从任务燃料与时间消耗、测控通信、月面可达性、拓展任务等多方面综合比较优劣性,确定三体周期轨道在载人月球探测任务中的适用领域,为未来登月飞行器部署及轨道方案的选择提供参考。
2 动力学模型及研究对象
2.1 限制性三体模型
描述飞行器在地月三体系统下运动状态,通常基于圆型限制性三体模型(Circular Restricted Three Body Problem ,CR3BP)进行分析。在质心旋转系中,飞行器的动力学方程满足式(1)、(2):
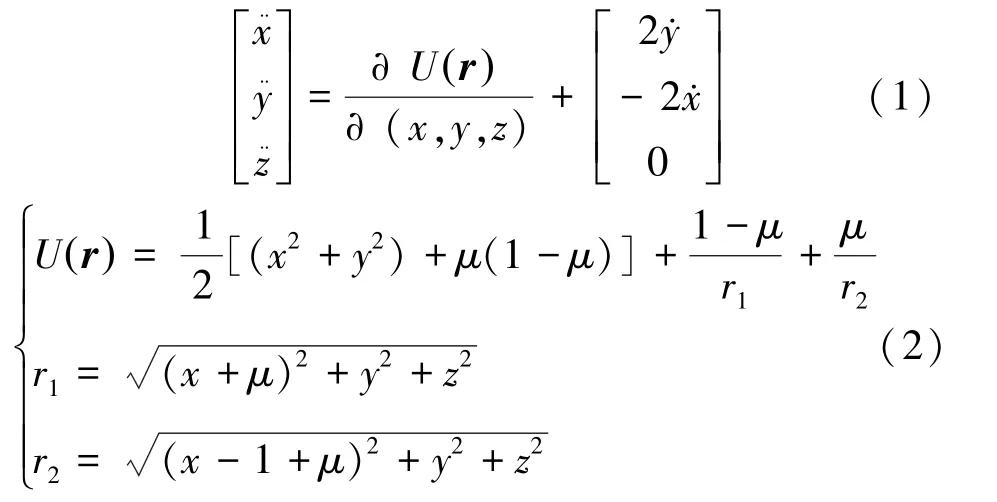
式中,r1与r2分别为飞行器相对地球、月球的距离;地月三体系统中系数μ≈0. 012 15;会合系下飞行器状态量为X= [r,v] = [x,y,
2.2 地月空间三体轨道
在地月空间三体系统下,5 个平动点附近存在着不同形状的周期轨道与拟周期轨道。本文针对L2 点附近Halo 轨道、月球附近的近直线NRHO 轨道及大幅值逆行轨道DRO 在载人月球探测中的应用进行研究分析,如图1 所示。
NRHO 轨道为运行于月球附近的三体周期轨道,能够通过L1 点与L2 点Halo 轨道演变确定,轨道周期约6~7 d。由图1(a)可知,NRHO 轨道的近月点距离月球较近,近月点高度可达100~300 km,能够支持月球极区的观测任务。研究表明,飞行器通过月球借力,只需较少的速度增量即可完成地球-NRHO 轨道间转移任务[7,9]。

图1 地月系统Halo、NRHO、DRO 空间位置Fig. 1 Map of Halo,NRHO and DRO in Earth-Moon system
Halo 轨道为运行在共线平动点附近的晕轨道。将飞行器部署于地月L1 点与L2 点Halo 轨道上,能够实现对月球正面与背面的连续观测及中继通信任务。
DRO 轨道为围绕月球的逆行共振平面周期轨道。DRO 轨道相对稳定,具有Lyapunov 稳定性,主要运用于日地系统观测任务以及作为捕获小行星的中转站。
3 登月模式分析
本文假设月球轨道空间站部署于选定的三体周期轨道上,给出不同登月模式下的任务影响:
1)速度增量需求和飞行时间。包括轨道转移速度增量,分为飞行器由地球往返三体周期轨道,三体周期轨道与环月轨道间往返任务,以及各阶段飞行时间;
2)任务支持性。包括测控通信,月面可达性,其他深空任务支持性,登月窗口,地面发射窗口;
3)安全性。包括空间环境以及任务可靠性等。
3.1 基于NRHO 轨道的登月模式
3.1.1 速度增量与飞行时间需求
针对地球与NRHO 轨道之间的往返飞行轨迹,NRHO 轨道转移设计基于序列二次规划算法(Sequential Quadratic Programming,SQP)与多重打靶法进行设计。假设地球停泊轨道满足轨道高度200 km,相对地球飞行航迹角0°约束,空间站进行月球借力飞行时,近月点高度设定为250 km。
月球轨道空间站由地球出发转移至目标NRHO 轨道的飞行轨迹如图2 所示,其中NRHO轨道近月距与远月距分别为 1838 km 和67 480 km。飞行器初始时刻航行于轨道高度200 km 的圆形地球停泊轨道上,施加逃逸机动速度增量3117.093 m/s,航行4.951 d 后进行月球借力机动,速度增量大小为182.460 m/s,继续航行0.772 d 后抵达目标NRHO 轨道,入轨机动为223.923 m/s,任务全程总飞行时间为5.722 d,总速度增量为3523.476 m/s。去程与回程轨道具有近似对称特性,各个特征点与各飞行段参数相近。
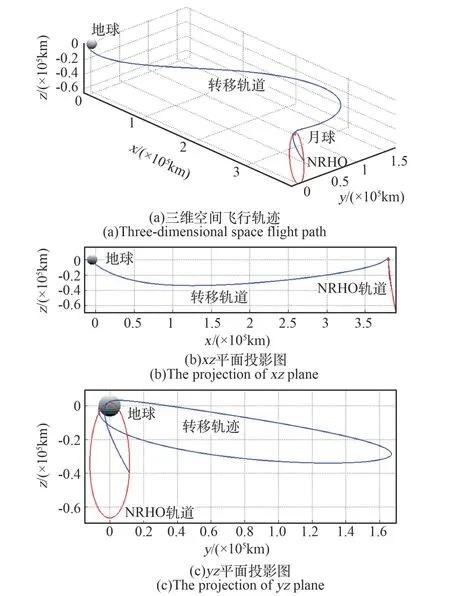
图2 地球-NRHO 轨道去程飞行轨迹Fig.2 The transfers from LEO to NRHO
飞行器往返于环月轨道(极轨)与NRHO 轨道的转移轨道图3 所示。探测器首先于目标NRHO 轨道出发,施加57.289 m/s 速度增量进入转移轨道,短时间飞行后,在环月轨道施加速度增量622.334 m/s 完成捕获任务,总速度增量为679.623 m/s。通过分析可知,探测器由环月轨道返回NRHO 轨道所需的速度增量与去程情况相近。总速度增量为679.640 m/s,其中逃逸NRHO速度增量与捕获点速度增量分别为57.306 m/s和622.334 m/s。
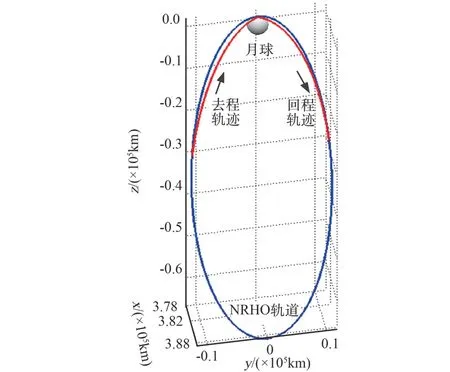
图3 往返于环月轨道与NRHO 轨道的飞行轨迹Fig.3 Round-trip transfer orbit between the LLO and NRHO
表1 给出了飞行器往返地球轨道LEO、空间站轨道NRHO 与环月轨道LLO 之间的速度增量需求与飞行时间。
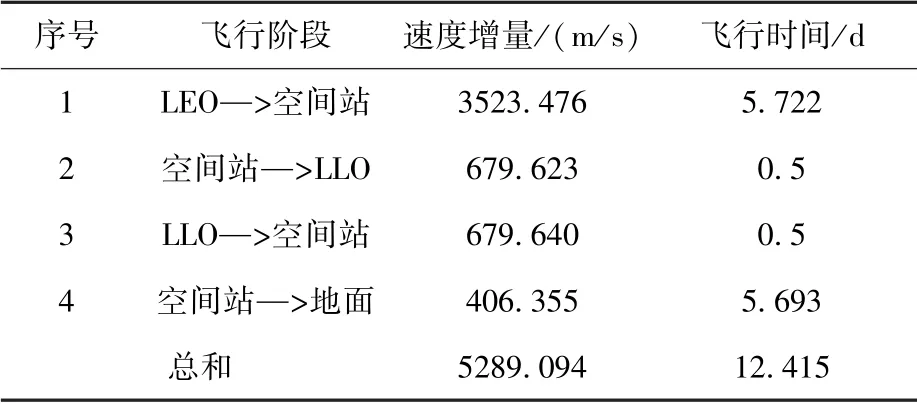
表1 速度增量与飞行时间需求Table 1 Requirement of velocity increment and flight time
3.1.2 任务支持性
1)测控通信。由图1 可知,NRHO 轨道近似垂直于地月连线。当月球轨道空间站布置于此类型轨道上时,对地通信可实现完全无遮挡,能够保持对地连续测控通信。其次,针对对月测控通信,运行于NRHO 轨道的飞行器能够较好地对月球极区进行通信,有效支持未来月球极区探测与极区科研站建设。
2)月面可达性。为分析飞行器由NRHO 过渡轨道到达月面的可达区域,设定飞行时间为0.5 d,往返速度增量变化见图4,其中类经纬度定义为在质心旋转系下的登月点经纬度。结果表明,往返月球赤道相对于其他着陆点更具挑战性,登月点在±90°的高纬度或高经度转移燃料最优。
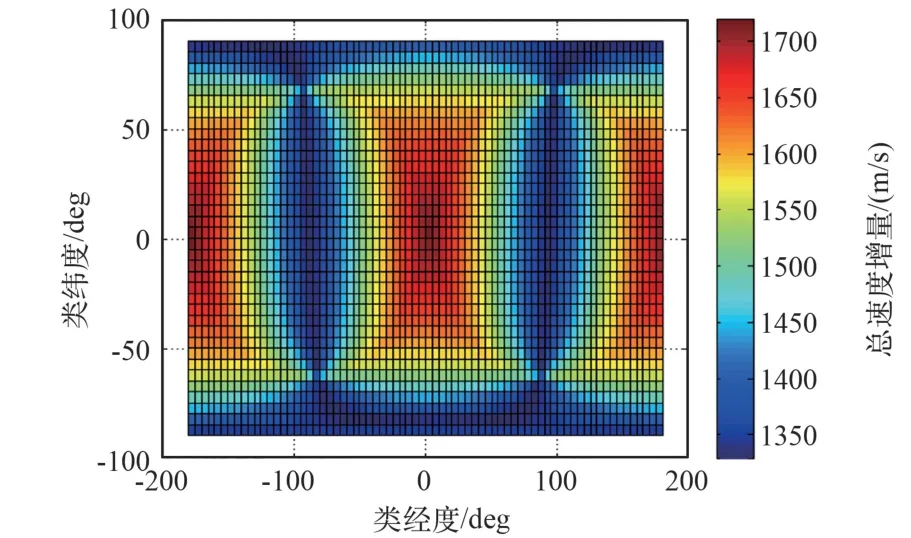
图4 往返轨迹的总速度增量变化特性Fig.4 The total Delta v of the optimal round-trip transfers
3)窗口分析。在会合坐标系中,地球与月球位于固定位置,NRHO 轨道相对于月球的位置固定不变。通过仿真分析可知,在不约束飞行时间的条件下,当以靠近月球区域(近月点区域)的NRHO 轨道上的点作为逃逸点时,不易设计出满足高度、航迹角、环月轨道倾角和升交点赤经约束的转移轨道,其余部分的设计难度相对较低。不同相位对应的转移轨道及各项参数如图5 所示。

图5 转移轨迹及相关参数Fig.5 Transfer orbits and the corresponding parameters
与月球轨道空间站登月窗口特性相似,在会合坐标系中,目标轨道空间站位置相对地球与月球保持固定。同时,三体系统为自治系统与时间无关,基于月球借力的NRHO 轨道转移的地面发射窗口具有任意性。
4)其他深空任务支持性。结合月球轨道门户计划,NRHO 轨道不仅能够保持月球极区探测,还能够支持小行星和火星探测任务。
3.1.3 任务安全性
1)交会对接难度。登月飞行器通过地月轨道转移及月球借力飞行后,进入NRHO 轨道附近区域,进行自主控制段飞行并进行交会对接。其难度主要体现在:①由于转移过程中考虑了月球借力辅助,微小的改变都可能影响到任务的成功性;②登月飞行器的自主导航与控制精度也将会影响月球轨道空间站与登月飞行器的交会对接;③三体模型下尚未存在实际工程验证的交会对接任务,交会对接关键技术亟待验证,挑战性较大。
2)空间环境。NRHO 轨道具有较好的稳定性,位于此类型轨道上的月球轨道空间站不存在被月球遮挡的情况,具有良好的光照条件。同时,此区域的热环境相对稳定,空间站受到微流星与空间碎片撞击的概率相对较低。
3)任务可靠性。基于NRHO 轨道的月球轨道空间站部署,其交会对接难度与精度要求较高,并且深空弱稳定场飞行控制技术相对要求较高,NRHO 轨道附近的空间环境稳定,轨道维持所需的速度增量较小,综合任务可靠性较低。
3.2 基于Halo 轨道的登月模式
3.2.1 速度增量和飞行时间需求
针对法向幅值28 000 km 的L2 点Halo 轨道,往返地球停泊轨道与L2 点Halo 轨道的转移轨迹如图6 所示。

图6 地球与Halo 轨道间往返飞行轨迹Fig.6 Round-trip transfer orbit between the LEO and Halo
空间站初始位于轨道高度200 km 圆形地球停泊轨道上,施加速度增量ΔvLEO= 3117.626 m/s,航行3.935 d 后执行机动195.021 m/s,完成月球借力操作,继续飞行3.353 d 后到达目标Halo 轨道,入轨机动增量为146.086 m/s,去程任务总飞行时间为7.288 d,总速度增量为3458.733 m/s。
登月任务完成后,飞行器需要施加187.853 m/s 的速度增量离开Halo 轨道,航行2.379 d 后抵达近月点位置,施加机动203.584 m/s,完成月球借力飞行,随后继续航行3.577 d 抵达地球附近。
针对飞行器往返于环月轨道与Halo 轨道转移任务。假设环月轨道高度250 km,轨道倾角与升交点赤经均设定为90°。对于去程轨迹,飞行器首先于Halo 轨道出发,施加96.504 m/s 速度增量进入转移轨道,航行4.444 d 后在环月轨道上施加611.645 m/s 完成捕获任务,总速度增量为708.149 m/s。飞行器由环月轨道返回Halo 轨道所需的速度增量与去程情况相似。总速度增量为709.175 m/s,其中逃逸Halo 轨道速度增量与捕获点速度增量分别为 97.163 m/s 和612.012 m/s,需要航行4.396 d。
表2 给出了飞行器往返地球轨道LEO、空间站Halo 轨道与环月轨道LLO 之间的速度增量需求与飞行时间。
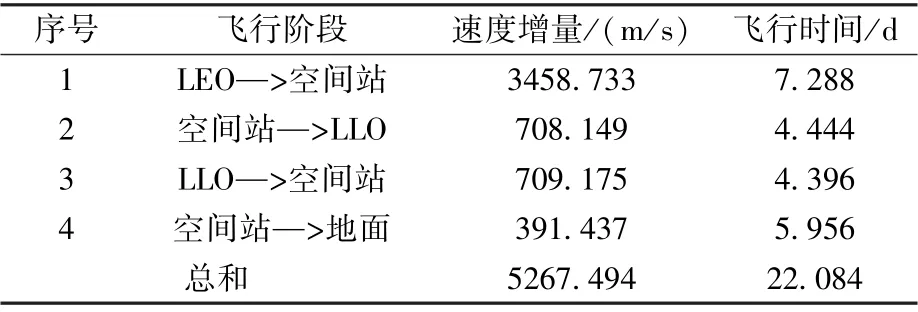
表2 速度增量与飞行时间需求Table 2 Requirement of velocity increment and flight time
3.2.2 任务支持性
1)测控通信。在地月三体系统会合坐标系下,Halo 轨道yz平面投影图如7 所示,由图可知,L2 点Halo 轨道具有一定的轨道高度,能避免被月球遮挡,可以在地面深空站进行测控通信。Halo 轨道能够有效支持月球背面的通信,而对于月球极区测控则受到Halo 轨道幅值大小、飞行器和地面设备天线张角大小影响。
2)月面可达性。不同飞行时间条件下,飞行器往返Halo 与不同类倾角环月轨道的速度增量变化如图8 所示。结果表明,不同飞行时间下,往返总速度增量介于1400 ~1850 m/s 之间。
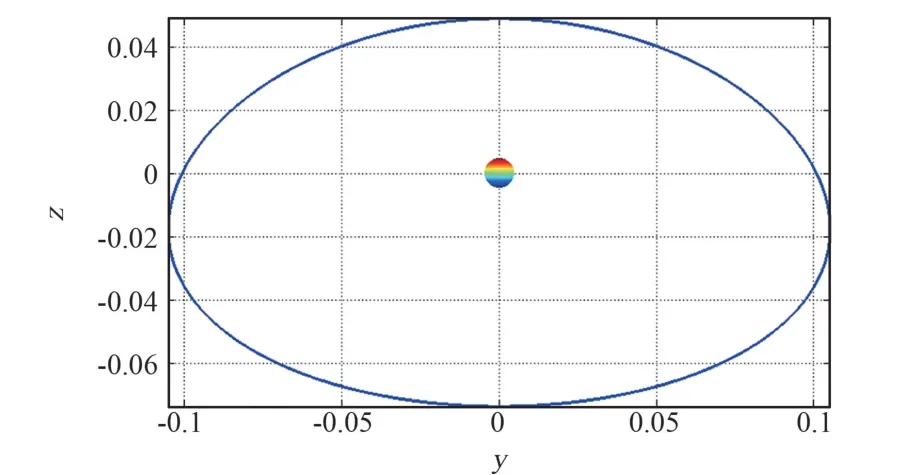
图7 Halo 轨道yz 平面投影图Fig.7 The projection of yz plane of Halo orbit

图8 往返轨迹的总速度增量变化特性Fig.8 The total △v of the optimal round-trip transfers
3)窗口分析。在质心旋转系下,地月L2 点Halo 轨道相对月球的位置固定不变。研究表明,Halo 轨道上不同相位点均存在到达指定的环月轨道,但不同相位点进行登月转移所需速度增量不同,相差约300 m/s[15]。与基于NRHO 轨道模式的登月窗口特性相似,目标轨道空间位置相对地球与月球保持固定,基于月球借力的Halo 轨道转移地面发射窗口具有任意性。
4)其他深空任务支持性。Halo 轨道不仅能够较好地完成与环月轨道间的往返,实现对月球探测,还能够有效地支持火星等深空探测任务。研究表明,飞行器由目标Halo 轨道出发,经过月球借力返回地球附近,随后施加机动0.631 km/s完成地球借力飞行,继续航行一段时间后进行深空机动0.08 km/s,飞行器总飞行时间约为285 d[16]。基于Halo 轨道的小行星探测任务可参照嫦娥2 号的小行星拓展任务[17]。
3.2.3 任务安全性
1)交会对接难度。登月飞行器通过地月转移与月球借力飞行,能够进入L2 点Halo 附近区域,进行自主控制段飞行并完成对接。与NRHO轨道相似,月球借力转移对飞行器最终进入Halo轨道的尺寸、相位与精度存在影响。同时,登月飞行器携带的导航设备及其控制精度对L2 点Halo轨道的交会对接任务产生影响,总体上交会对接难度较大。
2)空间环境。当月球轨道空间站部署在L2点Halo 轨道上时,由于L2 点Halo 轨道处于月球外侧,受到微流星撞击的概率相对较大。Halo 轨道具有较好的稳定性及良好的光照条件,同时,此区域的热环境相对稳定。
3)任务可靠性。基于Halo 轨道的月球轨道空间站部署,与NRHO 轨道相近,交会对接难度与精度要求较高,需要较好的飞行控制技术,而Halo 轨道附近的空间环境相对稳定,考虑各项因素的任务可靠性较低。
3.3 基于DRO 轨道的登月模式
3.3.1 速度增量和飞行时间需求
针对地球与DRO 轨道之间的往返飞行轨迹设计,选取目标DRO 轨道满足近月距67 090 km,远月距89 497 km。
飞行器由地球停泊轨道出发,经过月球借力,往返DRO 轨道的转移轨迹如图9 所示,施加速度增量ΔvLEO=3124.604 m/s,航行7.179 d 后执行机动192.099 m/s,完成月球借力操作,继续飞行6.380 d 后到达目标DRO 轨道,入轨机动增量为90.622 m/s,去程任务总飞行时间为13.559 d,总速度增量为3407.326 m/s。
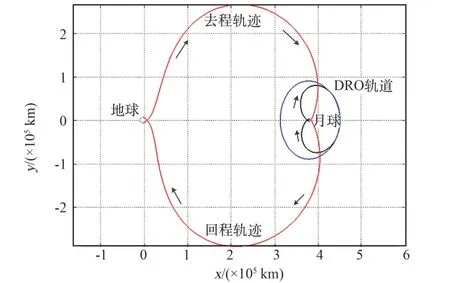
图9 地球与DRO 轨道之间往返飞行轨迹Fig.9 Round-trip transfer orbit between the Earth and DRO
针对回程任务,飞行器需要施加95.608 m/s的速度增量离开DRO 轨道,航行6.203 d 后抵达近月点位置,施加机动206.055 m/s 完成月球借力飞行,随后继续航行7.695 d 抵达地球附近。
针对环月轨道高度250 km,轨道倾角与升交点赤经均为90°的往返月球任务。具体地,飞行器首先于目标DRO 轨道出发,施加134.899 m/s速度增量进入转移轨道,航行6.189 d 后,在环月轨道上施加632.973 m/s 完成捕获任务,总速度增量为767.872 m/s。针对回程转移轨道,总速度增量为 767.429 m/s,其中逃逸DRO 轨道速度增量与捕获点速度增量分别为134.797 m/s 和632.632 m/s,需要航行6.048 d。
表3 给出了飞行器往返地球轨道LEO、空间站DRO 轨道与环月轨道LLO 之间的速度增量需求与飞行时间。
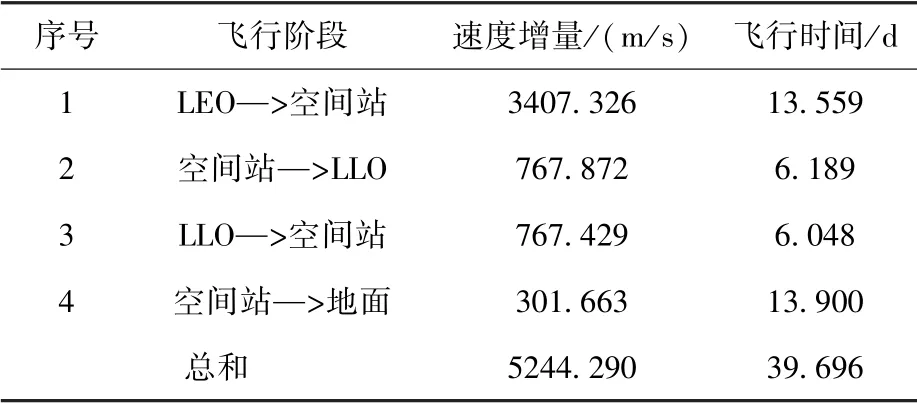
表3 速度增量与飞行时间需求Table 3 Requirement of velocity increment and flight time
3.3.2 任务支持性
1)测控通信。在地月三体系统中,DRO 轨道是xy平面内围绕月球的周期轨道,空间站运行于DRO 轨道上时,部分区域将受到月球的遮挡,并且DRO 轨道无法对月球极区进行测控通信覆盖。
2)月面可达性。飞行器往返DRO 与不同类倾角环月轨道的速度增量变化如图10 所示,单程转移时间为7 d,往返总时间14 d。由图可知,随着类倾角增大,往返总速度增量呈现逐步增大变化趋势。
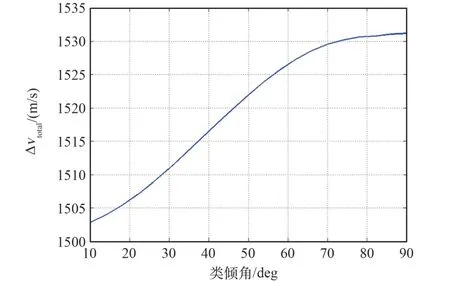
图10 往返轨迹的总速度增量变化特性Fig.10 The total △v of the optimal round-trip transfers
3)窗口分析。与L2 点Halo 轨道登月模式相似,飞行器从DRO 轨道不同相位均可以登月,但登月速度增量存在差异,速度增量相差约500 m/s。基于月球借力的DRO 轨道转移地面发射窗口具有任意性。
4)其他深空任务支持性。基于DRO 轨道经过月球和地球借力及深空机动后,同样能够保证飞行器完成火星探测任务。
3.3.3 任务安全性
1)交会对接难度。基于DRO 的登月飞行器的交会对接任务与基于NRHO 轨道和Halo 轨道的交会对接任务的设计难度相同,挑战性较大。
2)空间环境。当月球轨道空间站部署在DRO 轨道上时,过渡轨道围绕月球,飞行器运行于此轨道上时,部分区域光照将受到地球和月球的遮挡,同时,此区域的热环境相对稳定。
3)任务可靠性。基于DRO 轨道的月球轨道空间站部署,与NRHO 轨道和Halo 轨道特性相近,交会对接难度与精度要求较高,需要较好的飞行控制技术,而空间环境相对稳定,考虑各项因素的任务可靠性较低。
3.4 登月模式对比分析
对于近月空间三体周期轨道空间站,其优点为:①往返地球速度增量需求较小;②全月面可达,但DRO 往返LLO 转移时间较长且速度增量相对NRHO、Halo 较大;③地面发射窗口多,登月窗口多;④能较好支持月球以远深空任务。其中,对于NRHO、L2 点Halo、DRO这3 种轨道,NRO 往返月球的飞行时间最小,且速度增量需求最小,测控通信不间断;L2 点Halo 测控通信不间断。
由表4 可知,三体周期轨道更适合于要求登月窗口多,全月面可达,能更好支持后续深空等特点的任务。而难点在于任务安全性,交会对接难度大,收到微流星撞击概率大等问题。
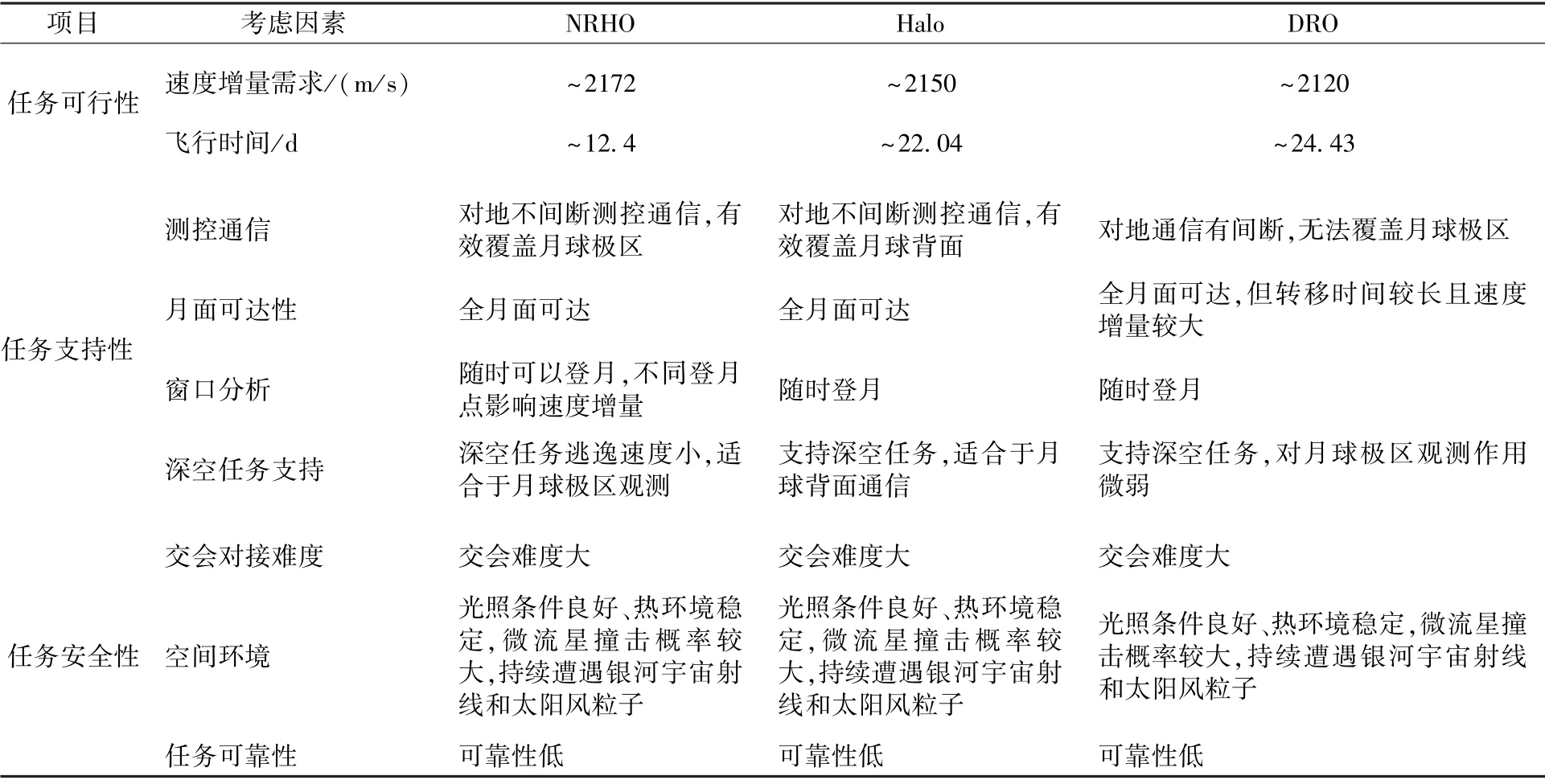
表4 基于不同三体周期轨道的登月模式优劣比较Table 4 Comparison of lunar landing modes based on different three-body orbits
初步比较NRHO、Halo 与DRO 登月模式可知,这3 种类型登月任务支持性与任务安全性相似,差异在于任务可行性与月球探测区域的选择。其中整个任务的速度增量消耗相当,而NRHO 往返月球的任务总时间最小。综合考虑,若针对月球极区观测且要求时间较短任务,可优选NRHO轨道;若针对月球背面任务,可优选Halo 轨道。
4 结论
1)针对速度增量与时间需求,飞行器地月往返所需的总速度增量分别为NRHO 812.738 m/s(11.415 d);Halo 732.544 m/s(13.244 d);DRO 584.384 m/s(27.457 d),燃料消耗较少,能够较好地满足任务对燃耗的指标要求。针对环月轨道与过渡轨道之间的能耗分析,飞行器从L2 点Halo 轨道、DRO 轨道转移至目标环月轨道LLO 需要航行4~6 d,而通过NRO 轨道进行过渡能够在短时间内(即0.5 d)完成轨道转移。因此,仅考虑任务燃耗,DRO 轨道优势较大,但飞行时间较长;仅考虑任务转移时间,可选择NRHO 轨道;而Halo 轨道为燃耗与时间的折衷方案。
2)三体周期轨道任务难点在于任务安全性,现阶段在三体周期轨道上仍未有实现交会对接的型号任务,需要突破三体周期轨道上交会对接的技术难题。同时,三体周期轨道也存在着微流星撞击概率大等问题。
3)三体周期轨道更适合于要求登月窗口多,全月面可达,能更好支持后续深空等特点的任务。针对月球极区观测且要求时间较短任务,可优选NRHO 轨道;针对月球背面任务,可优选Halo轨道。
本文结果对登月飞行器近月空间部署以及轨道方案分析具有一定的参考意义。
猜你喜欢
军事文摘(2022年14期)2022-08-26
北京航空航天大学学报(2022年5期)2022-06-06
当代陕西(2022年6期)2022-04-19
当代水产(2021年8期)2021-11-04
智慧少年·故事叮当(2021年3期)2021-06-29
军事文摘(2019年18期)2019-09-25
科学与财富(2019年3期)2019-02-28
文学教育(2018年5期)2018-05-26
舰船科学技术(2016年1期)2016-02-27
舰船科学技术(2015年9期)2015-12-23