
考虑驾驶风格差异的高原公路危险路段识别研究
2023-01-05 11:33朱兴林姚亮刘泓君叶拉森库肯艾力斯木吐拉
交通运输系统工程与信息 2022年6期
朱兴林,姚亮,刘泓君,叶拉森·库肯,艾力·斯木吐拉
(新疆农业大学,交通与物流工程学院,乌鲁木齐 830052)
0 引言
“交通运输与旅游融合发展”理念的提出,积极推进了国内高原景区道路的建设,吸引众多无高海拔地区驾驶经验的驾驶人出行。高原公路多依附山体修建,修建难度较大且线形多变,存在连续纵坡和弯坡组合等特征的路段,每百起交通事故死亡人数高达40~70人,因驾驶员操作不当引起的事故数约占总体的90%,超过76%的驾驶人认为高原环境更容易发生交通事故[1],驾驶人受海拔和气压等因素的影响,易出现反应速度减慢和判断失误等问题,且复杂的线形组合也给驾驶人的感知、判断与操控造成影响[2]。在应对外部环境及生理变化影响时,不同风格驾驶人的应对方式不同,存在危险的路段特征与分布特点也存在差异。因此,从人因角度出发,考虑驾驶人行为风格差异,依据驾驶状态辨识危险路段,利于揭示生理变化和行为特点与道路线形特征间的潜在风险关联,对高原公路的健康发展具有重要意义。
从交通安全角度分析,驾驶人不仅是信息处理者和决策者,也是调节者与控制者,其行为风格与驾驶状态对行车安全具有显著影响[3]。驾驶风格差异多源于人的性格与行为习惯不同,体现于车辆的运动特征,熊坚等[4]通过驾驶模拟实验验证了驾驶风险中的人因重要性,提出识别危险驾驶人群的方法。TAUBMAN 等[5]将驾驶人风格分为谨慎型、焦虑型、冒险性及愤怒型这4 类,发现冒险型驾驶员惯于违反规范,愤怒型驾驶员常出现攻击性行为,谨慎型与焦虑型驾驶员能仔细观察路况,但反应较慢,证明了驾驶风格的差异导致驾驶人出现的风险类型不同。关于驾驶风格的研究,方法主要为主观与客观测评[6],主观以问卷调查为主,结果易受个人主观影响;客观测评多采用聚类分析,研究多侧重于城市道路驾驶人风格聚类,针对高原环境驾驶人的行为风格差异性分析还有待补充。在危险路段识别方面,研究多以事故黑点鉴别与致因分析为主[7],MOHAMMAD 等[8]结合全局与局部自相关性分析方法,识别了伊朗交通事故的热点路段与空间模式。现阶段研究多针对城市道路交叉口和山区隧道等特定场景,成果适用范围相对固定,鲜有综合考虑高原环境下驾驶风格和生理状态与危险路段特征间交互性关系的研究。
综上所述,本文考虑驾驶人风格差异及生理指标的变化,从驾驶状态角度识别多类型驾驶人存在潜在风险的路段。为降低试验与客观实际的偏差,本文以实车试验的方式采集数据,使用DBSCAN聚类方法客观划分驾驶人行为风格,进一步以多方法组合的方式搭建基于卷积神经网络(CNN)、双向长短时记忆神经网络(BiLSTM)与注意力机制(Attention)的危险驾驶状态识别模型,通过GPS 点位对应实现各类型驾驶人的危险路段识别,并在辨识分析的基础上,使用多元回归方法融合驾驶人生理、行为与道路线形因素提出车速建议,为高原环境行车安全研究提供理论参考。
1 实验方案设计
1.1 实验路段
选取G217 线的独库公路(K670+500~K692+000)为实验路段,海拔范围于2405~3452 m,道路设计为双向两车道,设计车速为40 km·h-1,总体宽度约为8 m,车道外侧有防护栏但无中央分隔带。该路段依附高山修建,上行全程海拔持续增长,有94处弯坡段,多出现“S”型曲线,具有较为典型的高原环境公路特征,实验路段概况如图1所示。考虑到独库公路为热门旅游景区,实验于旅游淡季中道路交通流量较小时段进行,免受其他道路使用者影响,单向实验里程约为24 km,行驶时长约60 min,无疲劳驾驶隐患。

图1 实验路段概况Fig.1 Overview of test road section
1.2 测量指标选取
实验针对驾驶人生理指标、实时车速及道路线形参数采集和整理数据。生理反应是驾驶人在高原行车途中“感知、操纵及状态变化”的客观反馈,常用的指标来源于脑电信号(EEG)、肌电信号(EMG)及心电信号(ECG)等。从感知角度考虑,EEG 中β波信号变化可良好地表征驾驶人的警觉性提升[9];驾驶人感知到潜在危险之后,常对车辆进行操纵避险,EMG 的信号变化能够反应驾驶人对制动踏板的操控;由ECG 提取出的心率变异性指标(HRV)可直观反应驾驶人行车时心搏间期的微小差异,其中,血容量脉冲(BVP)[10]与心跳R-R间期标准差(SDNN)[11]均能良好体现驾驶人状态的变化。因此,本文针对驾驶人行车时的β波、EMG、BVP与SDNN采集数据。
对于驾驶行为的表征可由车速变化直接体现,实时车速不仅能体现车辆状态的变化,经计算后的车速变异性参数(平均车速、车速标准差及急加减速次数)还可用于驾驶风格的表征。考虑到高原公路特点以及试验路段特征,试验基于GPS信号采集行车轨迹,并综合海拔(H)与线形参数中的曲线路段转角值(p)、直纵坡坡度(i)及弯坡组合值(w)进行数据整理,因w为坡度与曲线半径的比值,所以,本文i仅代表直线纵坡坡度,测量指标及道路线形参数如表1所示。
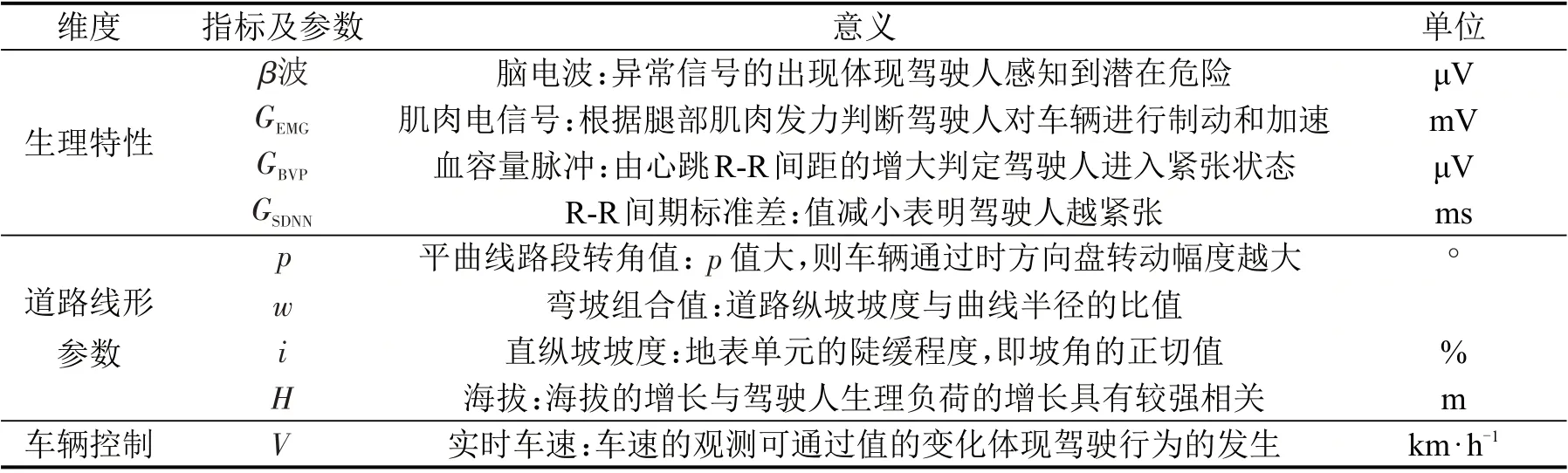
表1 测量指标及线形参数Table 1 Measurement indicators and road parameters
在测量指标数据分析时,为探究驾驶人行为风格差异和生理变化与危险路段特征间的潜在联系,本文首先采用DBSCAN 算法,由操控维度差异性分析驾驶风格;在此基础上,从驾驶人行车状态角度出发,搭建基于CNN-BiLSTM-Attention 的危险驾驶状态识别模型,通过生理变化及行为特征,识别各类型驾驶人存在潜在风险的危险路段,并综合多维度因素对其进行致因分析;最后,以车速建议为优化目标,结合道路线形和生理指标进行多元回归分析,设计车速建议方案,研究路线如图2所示。

图2 研究路线Fig.2 Route of research
1.3 实验人员及设备
实验招募30 名驾驶人,年龄分布于24~61 岁,平均驾龄为8.7年,被测驾驶人均持有C1类型驾驶证,无生理缺陷,实验过程无情绪压抑和过度疲劳等状况。数据采集以传感器传导技术为主,分别使用BioGraph 生理反馈仪和Enobio NE 脑电检测仪测量和记录驾驶人的生理指标数据,采样频率均为200 Hz。上述2款设备通过无侵入式连接测量各生理指标信号,于电脑终端D-Lab 平台汇总数据,并与GPS信号对接,实现长时序生理和行车数据的同步采集。将GPS 行车轨迹与实际道路进行图像贴合比对,再次检测贴合度误差超过10%的样本数据,确保实验数据的准确性。试验时间设定为10:00-19:30,单次上行实验起点海拔高度为2405 m,终点高程为3452 m,上行结束后经5 min 停歇,由该被测驾驶人驱车原路返回至起点,完成下行实验。部分实验数据如表2所示。

表2 部分实验数据Table 2 Partial trial data
2 驾驶风格差异性分析
2.1 表征指标选定
驾驶风格体现于驾驶人的车辆操控特征差异,试验路段为双向两车道,且试验时段交通流密度较小,无超车和会车等工况,因此,相较于微观驾驶行为指标(踏板深度和方向盘转角等),车辆行驶状态指标(平均车速、车速标准差及急加减速次数等)能更加直观地体现驾驶人对车辆的操控风格。从车辆操控角度分析,平均车速、车速标准差及急加减速次数可分别体现驾驶人的驾驶习惯、稳定性与谨慎程度,不同风格驾驶人的车速控制特点具有差异,例如,相对偏激的驾驶人通常保持较高的车速,面对突发状况时,常以急加速和急减速的方式进行避险,导致该类型驾驶人整体车速分布相对扩散,车速标准差亦较大,因此,本文选取上述指标表征驾驶人行为风格。
2.2 DBSCAN算法应用与结果分析
相较于K 均值聚类、模糊聚类等方法,DBSCAN(Density Based Spatial Clustering of Applications with Noise)算法无需人为指定簇的数量,能对任意形状和密度的数据进行聚类,且聚类结果无主观因素影响,能够客观反应数据真实的聚类特征[7],本文旨在依据指标数据特征对驾驶人行为风格进行聚类分析,因此,DBSCAN 算法具有良好的适用性。
本文记30 位实验驾驶人的平均车速、车速标准差及加减速次数值为数据集D,DBSCAN算法通过设置D中样本点邻域内的最低样本数量(MinPts)与聚类区域半径(ε),将数据样本点划分为簇心Pj、边界点与噪声点。在聚类分析之前,先对各指标数据进行标准化处理,并设定ε与MinPts带入运算,计算各样本点间距,因本文指标维度为3,所以,选取相对直观的欧式距离进行计算,即

式中:L为第j个样本与第j+1 个样本点的欧式距离;xj、yj、zj为第j个样本的平均车速、车速标准差与急加减速次数值。
基于Python 平台对驾驶人进行风格聚类,当MinPts 为3,且标准化后ε值为0.24 时聚类效果最佳,样本可分为3 簇,最少样本数为5,无噪声点的影响。为保证数据分析的直观性,对聚类结果进行数据还原,如图3和表3所示。因DBSCAN为无监督学习算法,数据分析无类别参照,因此,选取轮廓系数S对聚类效果进行检验,针对单一样本设定c为其与同邻域其余样本的平均距离,d为其与最近不同簇中样本点的平均距离,即

表3 聚类结果分析Table 3 Results of clustering

图3 DBSCAN聚类效果Fig.3 Effect of DBSCAN clustering

轮廓系数S是所有样本的轮廓系数均值,其取值范围为[-1,1],值越接近1,聚类结果越好。对本次模型运算进行轮廓系数检验,S为0.72,由此可知,模型准确度较高,适宜进行深入分析。
由模型聚类效果可知,30名实验驾驶员依据平均车速、车速标准差与急加减速次数可分为3 类,类型“0”聚类区域内包含14个样本点,其平均车速与车速标准差均低于其他类型驾驶人,表明该类型驾驶人将车速控制于较低水平,全程车速变化幅度较小,相对较多的急加速和急减速次数,体现了驾驶人对危险有着较高的谨慎程度,因此,将类型“0”定义为谨慎型;类型“1”区域有11 名驾驶人,平均车速分布于43.28~55.01 km·h-1,车速标准差亦相对较大,但急加减速次数相对最少,由此可知,驾驶人对车辆有着良好的把控能力,与类型“3”相比,该类驾驶人所有指标参数值均处于较低水平,因此,判定类型“1”为稳健型;类型“2”仅包含5 名驾驶人,该类型驾驶人的平均车速、车速标准差与急加减速次数值均高于谨慎型和稳健型驾驶人,车速值域较高,且变化范围较大,对危险的感知和判断能力相对较弱,因此,将类型“2”定义为激进型。
结合样本数据进行分析,谨慎型驾驶人上行和下行的平均车速与车速标准差相对接近,且60%的驾驶人下行时急加减速次数大于上行,行车途中始终保持谨慎的态度;稳健型驾驶人在上行和下行实验中均具有车速多变的特点,但下行时有67%的驾驶人对车速进行控制,平均车速与急加减速次数明显下降;激进型驾驶人上行时的平均车速普遍高于下行时,80%的驾驶人在下行时降低了车速,且对车速变化范围开始控制,但其激进的行为特点使其急加减速次数在下行时仍处与增长状态。由此可知,各类驾驶人行车特征存在差异,且驾驶人在上行与下行途中对车辆的操控特点也有不同,针对不同类型驾驶人在高原公路的行车风险,仍需结合道路线形、环境及驾驶人生理心理因素进行深入分析。
3 基于驾驶状态的高原公路危险路段辨识
3.1 危险驾驶状态识别模型
针对生理指标和实时车速等序列型数据的特征提取与状态识别,深度学习领域中的一维卷积神经网络(CNN)与长短时记忆神经网络(LSTM)算法对特征提取与学习有着较强的能力,将CNN 与LSTM单元结合,可利用CNN卷积核提取序列局部特征,同时,发挥LSTM的时序记忆能力,加强指标数据时空特征的提取和学习能力。处理较长的生理指标序列时,BiLSTM为LSTM的双向结构,弥补了单一LSTM单元指标特征遗漏的缺陷,与注意力机制结合可通过调节指标权重的方式重新调整算法对特征学习的倾向性。
本文实验数据具有多维和长时序的特征,因此,综合上述算法优势,以多方法组合的形式,采用CNN 一维卷积核同步提取驾驶人生理和行为特征,代入BiLSTM算法对其进行时空特征学习与危险状态判别,并在学习过程中由注意力机制对各生理指标进行权重调整,搭建基于CNN-BiLSTMAttention危险驾驶状态识别模型,避免单一算法时空特征遗漏等问题,保证特征提取、学习及判别的完整性和模型准确率,模型结构如图4所示。
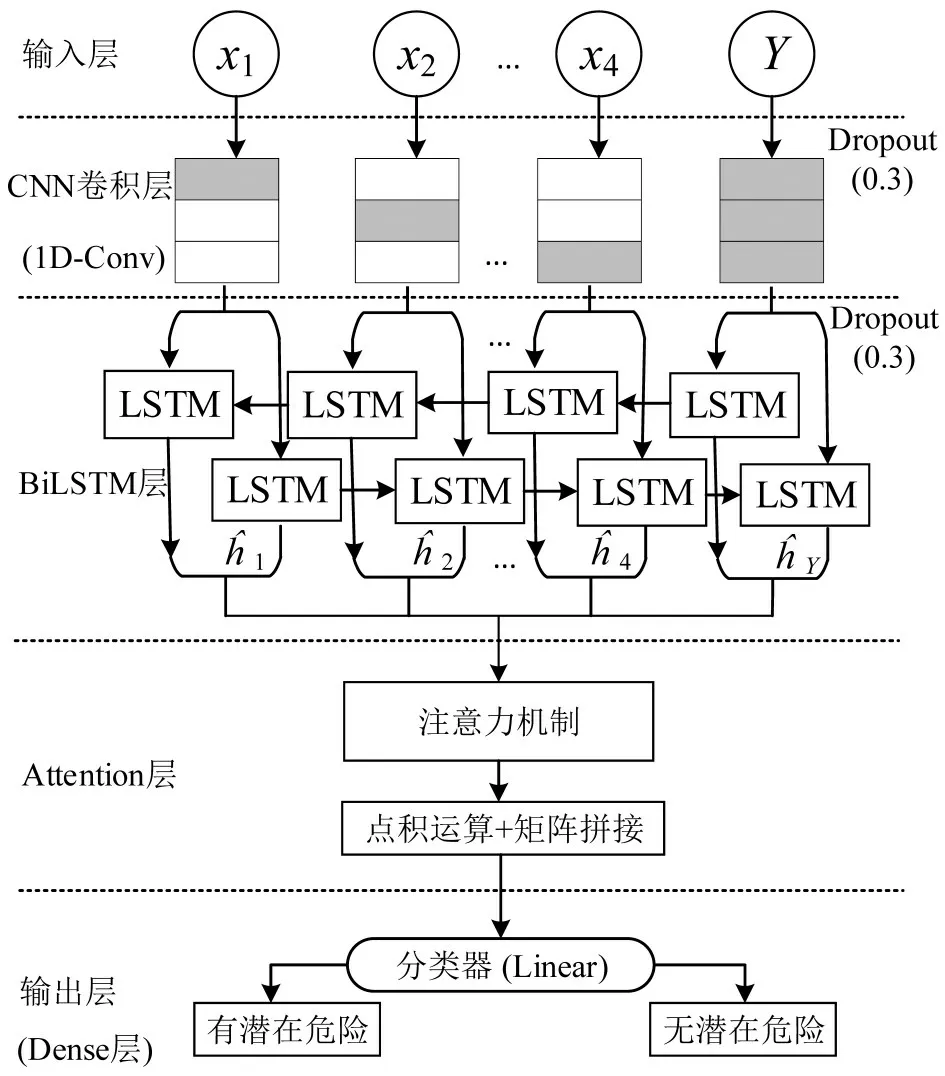
图4 模型结构Fig.4 Structure of model
图4 模型结构中,输入层将GSDNN、GBVP、GEMG及β波作为模型输入指标x1~x4,Y为车速变量,并对所有指标进行标准化处理,消除指标量纲对模型分析带来的影响,并将多指标数据代入运算,过程如下。
Step 1 将输入层指标数据代入CNN 卷积层,由一维卷积核(1D-Conv)提取序列特征,卷积为

式中:Z( out)为卷积特征输出;n为特征区域总数;为第I个指标的第J部分特征提取区域元素;为权重参数;为该卷积层的偏置参数;K为卷积计算的激活函数,本文采用相对常用的ReLU函数进行运算。特征提取区域受卷积核尺寸影响,因仪器数据采样频率为200 Hz,所以,模型将卷积核尺寸设为1×20 。
Step 2 在BiLSTM 层,将CNN 卷积层提取到的指标变化特征输入LSTM单元,并由正向和反向结构对时间序列数据进行双向特征学习,依据生理指标与车速的同时域变化特征对各点位驾驶状态进行异常识别,本文采用tanh函数将生理指标与实时车速进行映射融合,BiLSTM输出可写为

Step 3 在Attention 与Dense 层,将BiLSTM 层的输出作为Attention层的输入,通过点积运算得出各指标权重值,并与BiLSTM结果结合,在Dense层采用线性激活函数对生理与车速指标进行函数映射,令映射值为k,将k>0 的点位确定为危险状态点。在此基础上,分别在CNN 卷积层与BiLSTM层后分别添加Dropout 层,随机丢弃部分神经元节点,用于提升神经网络的整体效能。
3.2 模型结果分析
根据模型结构,本文基于Python 平台的Tensorflow 与Keras 框架搭建与运行模型。模型运算前,利用SPSS 软件针对各维度生理指标数据进行K-S 检验,确定数据的分布特征;其次,采用Pearson相关性分析对生理指标与观测变量的显著性关系进行检验;最后,以Pearson相关系数为变量间关联性的度量,结果如表4所示。

表4 Pearson相关性分析结果Table 4 Results of pearson correlation
由表4 可知,实验选取的生理指标与V均有显著相关,因此,将V作为目标变量,所有生理指标均作为输入指标进行运算。对模型训练进行训练集与验证集划分,设置训练集占比为80%,验证集为20%。对各样本结果进行准确率检验,上行和下行准确率均大于0.8,准确率均值分别为0.89 与0.90,表明,当前模型效果良好,适用于危险状态的识别,将识别得出的危险状态点位与GPS数据进行对应,得出各类型驾驶人在上行和下行途中的危险路段,结果如图5所示。
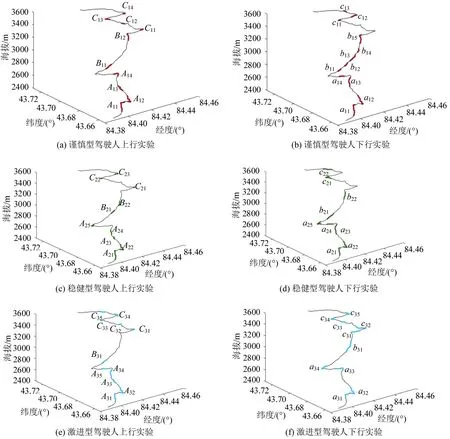
图5 危险路段辨识结果Fig.5 Identification results of dangerous road sections
由图5可知,各类驾驶人在上行和下行途中危险路段特征与分布情况既有相似也存在着差异。上行途中,谨慎型与稳健型驾驶人出现危险状态的路段均有10 段,总长度分别占总里程的33.39%与32.07%;激进型驾驶人的危险路段数量相对最多,有11段,约占总里程的36.72%。下行时,谨慎型驾驶人危险路段相对最多,有12 段,约占总里程的38.29%;稳健型与激进型驾驶人路段数量相对于上行均有减少,但路段总体长度均大于上行,分别占总里程的35.38%与37.61%。识别结果多为组合型路段,无法直接依据线形特征对路段进行分类,因此,本文按照直线路段(直纵坡)与曲线路段(弯坡)对危险路段进行初步划分,并按照海拔区间对各类型路段进行危险点位占比分析,发现各类型驾驶人无论行车方向,均于2400~2800 m区间中具有弯坡特征的路段出现危险驾驶状态,点位占比均超过40%,由此可知,道路线形对行车安全的影响能力相对大于海拔变化,需结合线性参数进行深入分析。
3.3 危险路段致因分析
从驾驶人感知、操纵及状态变化角度分析模型识别结果,以1 名激进型驾驶人上行试验为例,分析其在A32路段的指标变化特征,3 类驾驶人在该路段均出现危险状态(A32相似于A12、A22、a12、a22、a32),指标特征如图6所示。

图6 危险路段指标变化特征Fig.6 Characteristics of indicator changes in hazardous road sections
图6 中,在驶入A32路段时,首先,驾驶人β波出现异常,表明其感知到风险;随即GBVP与GSDNN指标出现变化,GBVP周期的扩大体现了驾驶人进入紧张状态,GSDNN数值的下降表明,驾驶人心跳R-R间期开始缩短,驾驶人开始紧张;最后,在弯坡处驾驶人的GEMG信号出现短时异常,即驾驶人对车辆进行快速操控,由V的特征变化可以看出,该驾驶人在该路段有多次大幅度加速和减速行为。针对各类型驾驶人生理和车速与道路线形参数进行Pearson相关性分析,因GBVP呈周期性变化,而GSDNN以数值变化情况直观反应生理状态,且与GBVP具有相同的表征作用,所以,仅采用GSDNN进行相关性分析,结果如图7所示。
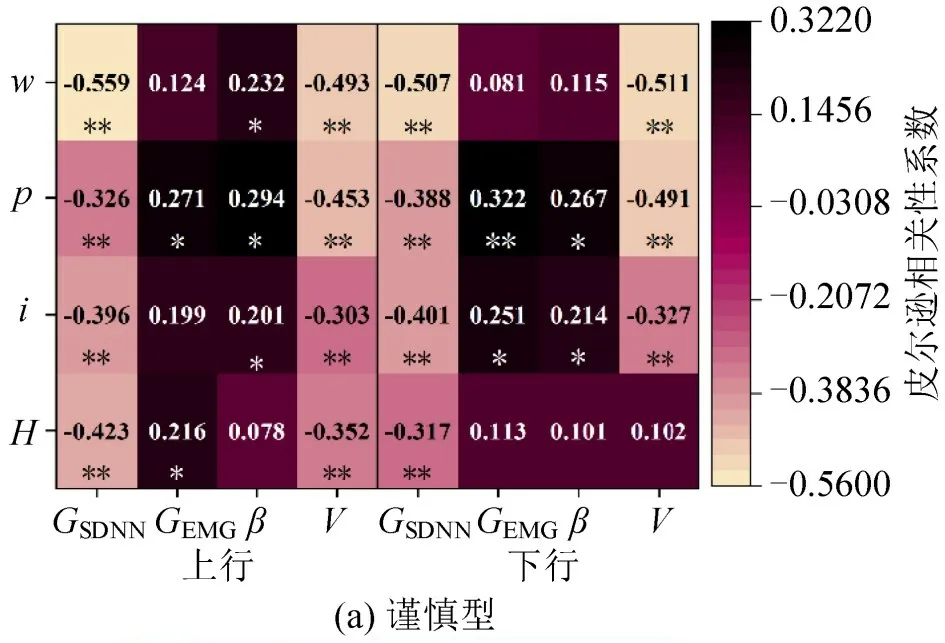
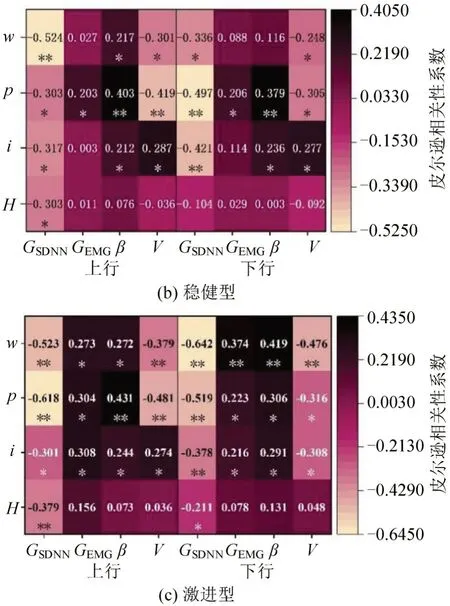
图7 驾驶人危险状态特征分析Fig.7 Analysis of hazard state characteristics
图7 为多指标Pearson 分析结果,其中,**、*分别表示显著性在0.01、0.05级别。基于分析结果发现,海拔的变化对3类驾驶人状态改变均起到了负向作用,加速了驾驶人紧张状态的发生,上行路段影响效果相对明显,仅稳健型驾驶人在下行时无明显影响。基于驾驶行为角度对各类型驾驶人危险路段进行致因分析:
(1)谨慎型驾驶人对转角值相对敏感,上行和下行Pearson 系数分别为0.294 与0.267,在进入弯坡路段后,GSDNN出现明显下降,随即GEMG信号出现明显变动,随着w的增加,V开始减小,该特征发生于A12、A13、A14、C11、C13、C14、a11、a12、a13、b13、b14、b15、c11路段中;当感知到 ||i或w增加时,驾驶人开始紧张并持续减速,发生于路段A11、B12、a14、b11、b12、c12、c13中;驶离弯坡路段后,驾驶人感知到 |i|在短时间内持续增长时,GSDNN指标快速下降,紧张状态持续至其适应 |i|的增长,该特征发生于B11与C12路段中。
(2)稳健型驾驶人感知弯坡路段后,GEMG信号出现明显波动,V快速减小,相对来说,该类型驾驶人上述指标在危险状态中变化幅度最小,上述特征发生于A22、A23、A25、B22、C21、C22、C23、a21、a22、a23、a25、c21、c22路段中;感知直纵坡变陡时,驾驶人逐渐提升车速,GSDNN也逐渐变小,紧张状态随i变小趋向于结束,相比于谨慎型驾驶人的行为特征,稳健型驾驶人在下行坡度增大时多进行加速操作,欲快速驶离路段,但无GEMG信号的大幅变动,GSDNN降幅较低,该特征发生于A21、A24、B21、a21、a22、a23、a25、c21、c22路段中。
(3)激进型驾驶人进入弯坡路段前,GEMG信号出现明显变化,V有大幅度下降,GSDNN同时开始快速下降,驾驶人即刻转入紧张状态,驶离路段后GSDNN下降趋向于平缓,但V有明显提升,该特征出现于A35、B31、A33、C31、C32、C33、C34、C35、a31、a33、a34、c31、c33、c34、c35路段中;驾驶人感知到i或w出现明显增加,GEMG与V有均显著变化,GSDNN持续下降,该特征发生于A31、A32、A34路段中,在A31与A34路段中,V为增加状态,在A32中V则为减小状态,下行时该特征出现于a32、b31、c32路段中。
根据现有成果对高原公路驾驶人的紧张程度划分,当GSDNN于[0,25)ms 与[25,31)ms 时,驾驶人分别为高度和轻度紧张,于[31,35]ms时为舒适状态[12]。按照该标准对各类型驾驶人的危险路段线形区间进行GSDNN值域进行界定,如表5所示。
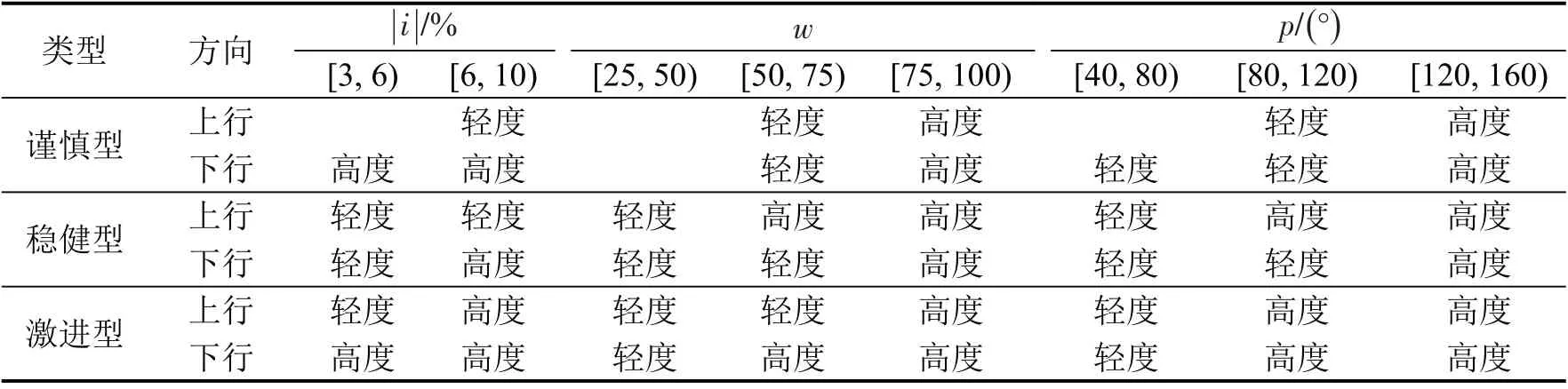
表5 驾驶状态界定Table 5 Definition of driving status
由表5可知,各类驾驶人行驶至不同线形参数组合时,状态表现具有共同也存在差异,从整体来看,3 类驾驶人在下行试验中更易出现高度紧张状态,制定优化方案时可结合道路线形因素进行综合考虑。
4 优化方案设计
车速控制为驾驶人应对危险的主要手段,且驾驶风格和生理与车速变化之间的影响具有交互性,因此,本文以车速控制为优化方案的立足点,综合考虑各类型驾驶人生理、车速、海拔及道路线形因素设计优化方案。根据识别出的线形组合路段,按照直线路段(直纵坡)与曲线路段(弯坡)划分,并分别对各类型驾驶人进行指标和参数数据总结及多元回归分析,将生理指标GSDNN为因变量,车速和道路线形参数为自变量,结果如表6所示。
由表6 可知,R2为回归准确率,当前所有模型R2均大于0.5,表明各模型均可用于计算。针对各类型驾驶人的危险路段,采用表6中对应回归式进行计算。首先,保证驾驶人行车时处于舒适状态,将GSDNN值域定为[31,35]ms;其次,分别输入各路段线形参数值,对车速进行不等式求解,得出直线和曲线路段安全车速区间;最后,则以直线和曲线路段区间交集的方式计算各组合路段的车速安全域。因道路服务所有类型使用者,且驾驶人无法对自身的行为风格有客观和正确的认知,在优化时应让方案适用于所有类型的驾驶人。取同向相邻路段的多区间车速交集(各类驾驶人车速安全域),作为整体车速建议区间,以辅助警示标置的形式放置于路侧,如图8所示。

表6 多元回归分析结果Table 6 Results of multiple regression analysis

图8 警示标志放置及车速建议区间Fig.8 Warning sign placement and speed advice range
在图8中,V1至V5为上行路段警示标志摆放位置及车速区间建议,V6至V9则提供了下行路段车速建议,所有警示标志间均有较远间隔且数量适中,过多的车速建议区间会导致驾驶人车速的多变及驾驶负荷的增长。放置点多为危险路段起始点前视线良好处,给驾驶人感知、决策与操纵增加时间。按照各警示标志中的建议车速行驶,驾驶人对安全车速区间有清醒的认知,并对车速有良好的控制,GSDNN则保持于[31,35]ms 之间,全程保持舒适状态。
5 结论
(1)通过驾驶风格聚类分析发现,驾驶人可分为谨慎型、稳健型与激进型,3类驾驶人的行为特征存在显著差异,谨慎型驾驶人在上行和下行途中均保持较强的警惕性,稳健型驾驶人观察、判断以及对车速的把控能力较强,而激进型驾驶人车速多变,对风险的感知和判断力较弱,行车较为莽撞。
(2)在高原环境中,道路线形对行车安全的影响相对强于海拔变化,各类驾驶人的危险路段多为具有弯坡特征的组合型路段,上行途中,3类驾驶人对弯坡组合值与转角值的增长最为敏感,稳健与激进型驾驶人最易出现高度紧张状态,而谨慎型驾驶人受线形影响相对较小;下行时,直纵坡坡度对行车安全的影响能力有显著提升,谨慎与激进型驾驶人在坡度大于6%时均易出现危险驾驶状态,而激进型驾驶人在弯坡组合值大于50 和转角值大于80°时也易高度紧张,综合来看,激进型驾驶人在上行和下行中存在着相对最高的驾驶风险,研究结果可为高原公路管理措施制定和道路线形设计提供参考。
(3)通过深度学习方法的组合运用发现,CNN、BiLSTM 与Attention 的结合对于从生理和车辆控制角度识别危险驾驶状态的效果较好,上行和下行模型准确率均值分别为0.89 与0.9,适用于长时序生理及行为指标的特征提取与状态识别,针对识别结果,高原公路交通运营管理阶段以运行车速区间化建议作为管控方式,利于从人因角度降低事故率。
猜你喜欢
铁道建筑技术(2021年3期)2021-07-21
西部交通科技(2021年9期)2021-01-11
铁道建筑技术(2020年11期)2020-05-22
中国交通信息化(2019年9期)2019-11-16
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
