随机不平路面条件下半主动悬架的模糊控制研究*
2023-01-04 09:39姜楠楠陈小亮
河南工学院学报 2022年6期
姜楠楠,董 娜,陈小亮
(1.河南工学院 机械工程学院,河南 新乡 453003;2.河南工学院 车辆与交通工程学院,河南 新乡 453003)
0 引言
随着时代的发展,人们对车辆的舒适性、安全性和操纵稳定性的要求不断提高。悬架作为车辆的重要组成部分,可有效缓冲路面对车身的冲击与震动,因此,针对不同种类的悬架和控制策略的研究对提高汽车总体性能有着非常重要的意义。悬架根据能量消耗不同可分为被动悬架、主动悬架与半主动悬架[1]。被动悬架具有固定的弹簧刚度和阻尼系数,只能在固定的频段内拥有良好的乘坐舒适性和路面附着能力[2]。主动悬架能够在较宽频段内获得显著减振性能,但高成本与低可靠性限制了它的推广应用[3]。半主动悬架是被动悬架和主动悬架的折中,具有结构简单、能耗低、可靠性高和频率调节范围宽等优点[4-6]。
目前,半主动控制装置常采用的磁流变阻尼器[7]。可以通过调节供应电流实现阻尼力大小的改变[8]。半主动控制策略可分为经典控制、现代控制和智能控制。经典控制策略中PID控制、空钩和地钩控制等应用较为广泛[9-11];现代控制策略包括H∞、滑模控制和最优控制等[12-14];神经网络控制[15]、模糊控制[16-18]和遗传算法控制[19]等属于智能控制策略。模糊控制利用人类专家的控制经验,将被控对象模糊化后,与知识库信息模糊对比推理得到相关信息,再进行解模糊化处理,以便为控制对象提供信息。它不需要建立精确的数学模型,对非线性、复杂不确定性对象表现出了鲁棒性好、控制性能高、运行速度快等优点..[20-22]。本研究将采用模糊控制策略对半主动悬架的振动特性进行分析。
本研究以1/4车辆半主动悬架为研究对象,通过建立其二自由度动力学模型,在随机不平路面激励下,以车身加速度、悬架动行程和轮胎动载荷作为悬架性能改善的主要指标,对随机不平路面条件下半主动悬架的模糊控制策略进行研究,并将采用模糊控制策略的半主动悬架与被动悬架比较,验证所提控制策略的优越性。
1 1/4车辆悬架相关模型建立
1.1 1/4车辆系统动力学模型
二自由度1/4车辆半主动悬架模型的结构如图1所示,主要由车身质量(簧载质量)、轮胎及其连接件(簧下质量)、弹簧、阻尼器等组成。
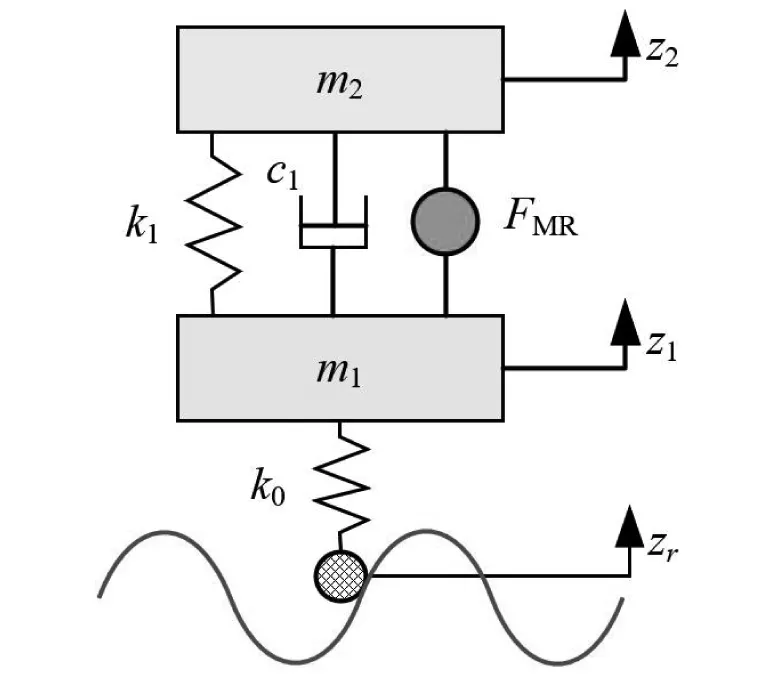
图1 1/4车辆半主动悬架模型
1/4半主动悬架的动力学方程为:
(1)
式中,m1为簧下质量,m2为簧载质量,k0为轮胎的刚度,k1为连接轮毂和车架的悬架的刚度,c1为车轮与车架之间的粘度系数,FMR为半主动控制产生的阻尼力,zr道路激励位移,z1为簧下质量振动位移,z2为簧载质量振动位移,sgn(·)为符号函数。
由于磁流变阻尼器在实际应用中提供的可调阻尼力范围有限,考虑到阻尼力的应用范围,有必要增加调节器。在阻尼器活塞的当前相对位移和相对速度下,当阻尼器的输入电流变化时,FMR不应超过最小阻尼力Fmin和最大阻尼力Fmax。FMR与Fe之间的关系应满足以下条件:
(2)

(3)
Y=CX+DU
(4)

1.2 随机不平路面模型
在对车辆半主动悬架的数学模型进行振动特性分析之前,需要建立合理精确的路面激励模型。将车辆匀速行驶一段,以路面相对基准平面的高度函数作为路面不平度[23]。通常将路面不平度作为高斯各态历经的平稳随机过程,其统计特性用功率谱密度(Power Spectral Density,PSD)来描述。根据GB 7031—2005[24],路面不平度的PSD定义为:
(5)
式中,n为空间频率(m-1);n0为参考空间频率(m-1),n0=0.1 m-1;Gr(n0)为参考空间频率下的PSD值(m3);W为频率指数,通常取W=2。根据Gr(n0)值的不同,空间频率在[0.011,2.83] m-1间,将路面不平度分成从A级到H级8个等级。
引入车速可将公式(5)由空间频率PSD转换成时间频率PSD,从而构建时域随机路面激励模型。构建时域随机路面激励模型常用的方法有滤波白噪声法、谐波叠加法、ARMA模型法、傅里叶逆变换法、分形分析法和小波分析法等[25-27],其中滤波白噪声法具有计算速度快、精度高等优点[28]。本研究采用一阶滤波白噪声法构建时域随机路面激励模型,一阶滤波白噪声系统的时域表达式为:
(6)
式中,zr(t)为道路激励位移;ω(t)为功率谱密度等于1的高斯白噪声;a和b为系统参数。通过推导计算,可得出基于滤波白噪声法生成的路面激励模型为:
(7)
式中,f0为最低截止频率(Hz);v为车辆行驶速度(m/s)。
本研究在车速v=20 m/s,B级和C级路面激励下对1/4车辆悬架的振动特性进行分析,取f0=0.2 Hz,B级路面的Gr(n0)=64×10-6m3,C级路面的Gr(n0)=256×10-6m3,则B级和C级路面不平度时域曲线如图2所示。
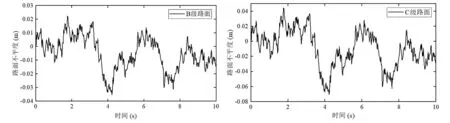
(a) (b)图2 B级(a)和C级(b)级路面不平度时域曲线
图3为B级和C级路面相应的仿真功率谱密度曲线与GB7031-2005中标准功率谱谱密度曲线对比结果。从图中可以看出,路面不平的的仿真功率谱密度与国标中标准功率谱密显著一致,说明了随机不平路面函数的正确性。

(a) (b)图3 B级(a)和C级(b)路面功率谱密度比较
2 模糊控制器
模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础,通过模仿人类语言开发出来的一种控制算法。本研究采用模糊控制器对1/4车辆悬架进行控制,对车辆悬架振动特性进行分析。降低簧载质量垂直振动加速度是模糊控制器的主要功能,它对接收到的模糊化的输入数据与知识库中的数据和规则进行对比分析,去模糊化处理后生成精确的数值,输入给执行器。图4为1/4车辆模型模糊逻辑控制框图。
本系统中,模糊控制器由以下四部分组成:(1)知识库:包含数据库和规则库。用于降低1/4车辆悬架振动水平的模糊控制规则储存在规则库中。(2)模糊推理:根据输入模糊值,选择合适的模糊控制规则,通过求解模糊关系方程获得需要阻尼力的模糊量。(3)模糊化接口:对精确的输入值进行模糊化处理,以便与规则库中的规则相匹配。(4)去模糊化接口:将模糊推理的结论转化为执行机构可以识别的精确值(需求阻尼力),对1/4车辆悬架进行控制输入。
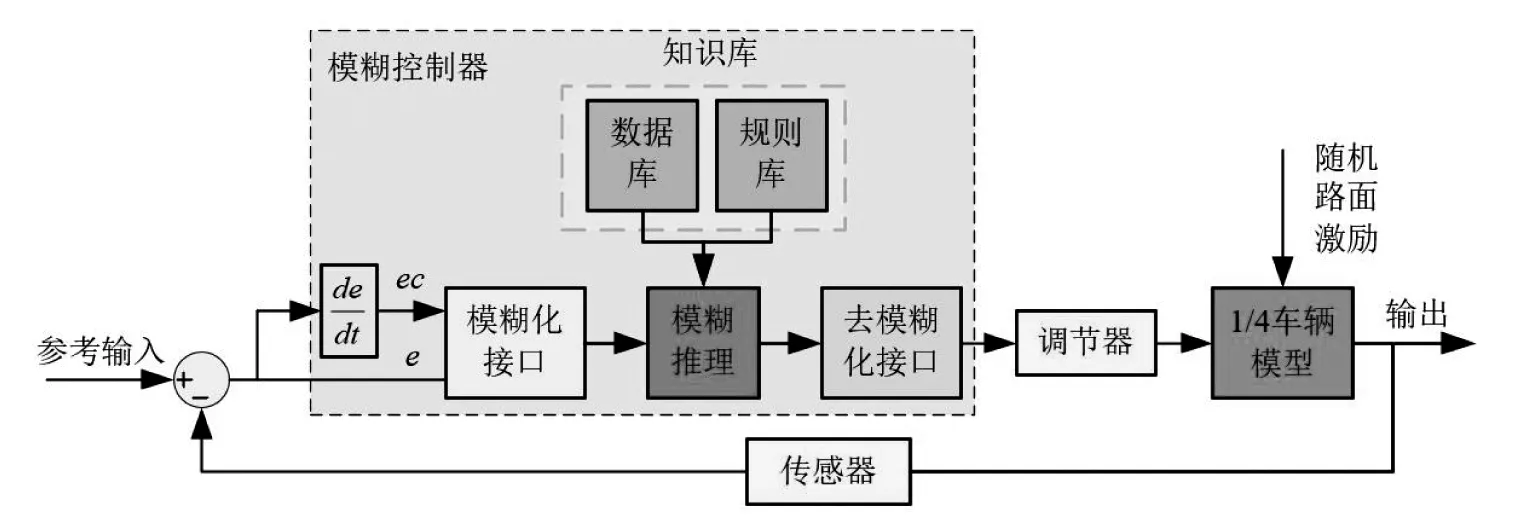
图4 1/4车辆模型模糊控制框图

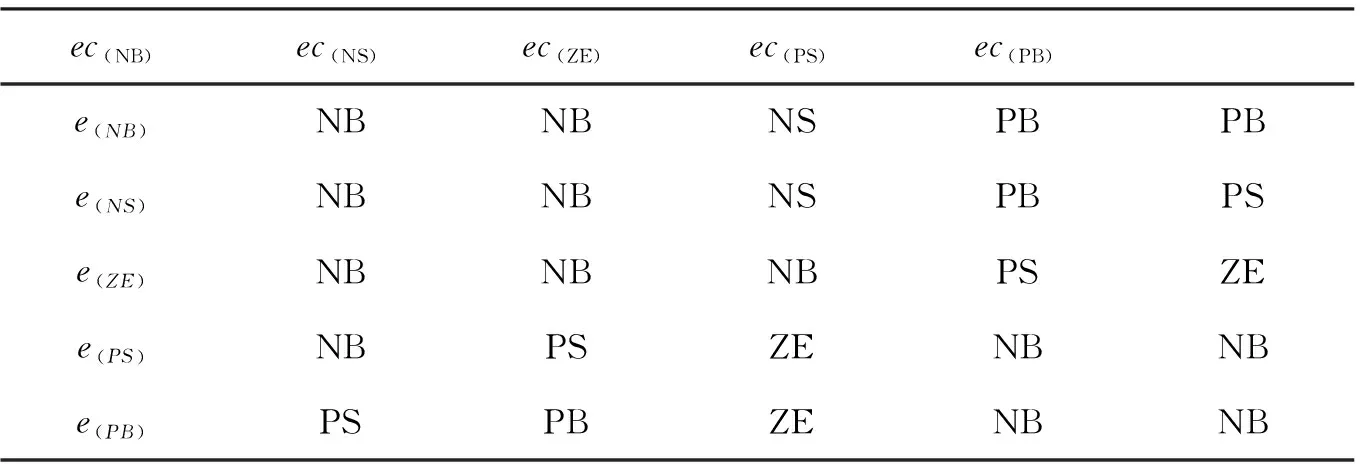
表1 模糊控制规则
3 数值仿真及结果讨论

为了量化不同路面激励下半主动和被动悬架输出性能评价指标,表2给出了B级路面和C级路面激励下半主动悬架和被动悬架响应的均方根。由表2可知,在路面等级B和C水平下,半主动悬架的簧载质量加速度均方根值分别较被动悬架降低了24.37%和32.05%,簧载质量悬架挠度均方根值分别较被动悬架降低了50.57%和44.94%,轮胎动载荷均方根值分别较被动悬架降低了38.22%和38.16%。与被动悬架相比,模糊控制的1/4车辆二自由度悬架的半主动控制可以有效降低车身加速度、悬架动挠度和轮胎动载荷,防止悬架失效,提高了乘坐舒适性、轮胎寿命和车辆操纵稳定性。

表2 不同路面激励下的悬架性能指标比较
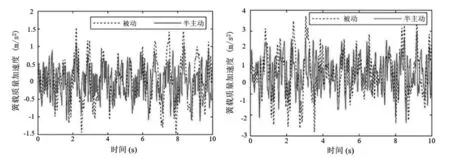
(a) (b)
4 结论
通过建立1/4车辆二自由度半主动悬架模型,推导基于高斯白噪声的随机不平路面模型,利用模糊控制器对半主动阻尼力进行跟踪,对车辆的动力学特性进行了仿真分析。仿真主要采用B级和C级路面对半主动悬架进行激励,制定合适的模糊规则对车身加速度、加速度变化率和阻尼力进行调整。仿真结果表明,在B级和C级路面激励条件下,基于模糊控制的1/4车辆半主动悬架与被动悬架比较,乘坐舒适性、轮胎附着能力和操作稳定性均有显著提高。
(责任编辑吕春红)
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
厦门大学学报(自然科学版)(2022年4期)2022-07-15
电子技术与软件工程(2021年10期)2021-07-05
广西科技大学学报(2021年1期)2021-03-15
北京理工大学学报(2020年11期)2020-12-15
现代装饰(2020年7期)2020-07-27
物理通报(2019年11期)2019-11-07
科学与财富(2017年12期)2017-05-16
汽车技术(2017年4期)2017-04-26
商(2016年28期)2016-10-27