
基于线结构光扫描的结冰冰形三维测量
2023-01-04 11:24张文清肖厚元刘桂华
测控技术 2022年12期
王 斌, 张文清, 王 众, 肖厚元, 刘桂华, 梁 杰*
(1.中国空气动力研究与发展中心,四川 绵阳 621000; 2.西南科技大学 信息工程学院,四川 绵阳 621000)
飞机在低于冰点的温度下飞行时,如果遇到含有过冷水滴的云层,云层中的水滴撞击在飞机表面上,就会导致结冰。机身表面的结冰会改变飞机的绕流流场,导致部件载荷分布发生变化,从而破坏空气动力学性能,影响飞机的操纵性和稳定性,危害飞行安全,轻则会使安全飞行范围减小,重则会导致机毁人亡的严重事故。
为探索结冰机理、进行结冰气象条件下飞行器空气动力性能评估、安全评估、防/除冰等研究工作,国内外学者从CFD数值计算、风洞试验、飞行试验等3个方面开展了相关研究工作,并取得了很多研究成果。由于自然结冰条件下的飞行试验安全性低、成本高,目前主要在结冰风洞中进行模拟结冰试验,进行飞行器结冰条件下飞行性能和安全评估,并验证防/除冰系统性能和CFD数值计算结果。在风洞结冰试验中,一般需要测量结冰体的厚度、形状等信息。随着研究的深入,特别是对3D结冰计算模型的研究不断深入,学者们对结冰体3D形状的测量提出了明确需求。结冰与液态水含量、平均水滴直径、温度、结冰时间、飞行速度和攻角等参数紧密相关[1]。为探索这些参数对结冰生长过程的影响,需获取时间解析(Time Resolved)3D冰形,在风洞试验中进行结冰生长过程3D冰形在线测量。
现有结冰冰形测量方法主要有:热刀法、摄影测量法[2]、激光刀切法[3-6]和三维扫描仪测量法[7]。
热刀法又称描迹法,图1为热刀法测量冰体横截面轮廓,通过将与试验模型适配的金属片加热后垂直插入冰体,使冰体融化形成缝隙,在缝隙处插入标尺纸,用铅笔在标尺纸上描绘冰体轮廓。该方法简单易于实现,被广泛使用,但存在很多不足:① 热刀接触冰形表面时,容易融化结冰纹理粗糙部分的细节信息,同时破坏融化缝隙周围结冰冰形;② 测量效率低,难以实现3D冰形测量;③ 采用铅笔描迹时,难以准确描绘精细的轮廓区域,且手工操作容易碰掉凸起的小冰芽。

图1 热刀法测量冰体横截面轮廓
摄影测量法(见图2)采用两台摄像机拍摄试验过程中的冰形图像,利用摄影测量原理,对冰形进行三维重构。摄影测量法在测量效率上相较于描迹法有了很大提高,然而,因冰体成像对比度低,难以实现高精度三维重建,该方法一般用于冰形记录,很少用于定量测量。
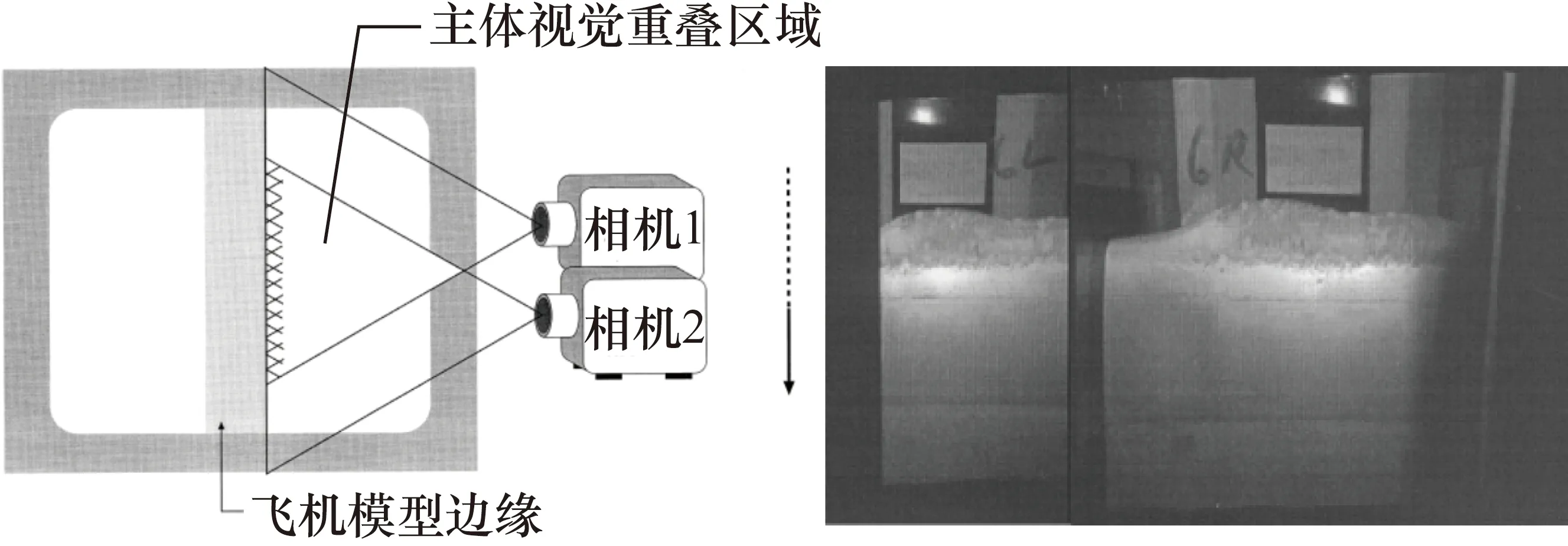
图2 摄影测量法用于冰形测量
激光刀切法(见图3)采用线结构光代替热刀,采用视觉测量方法对冰体横截面轮廓进行测量。该方法可用于实现结冰风洞试验中,结冰生长过程冰体横截面轮廓时间解析测量如图4所示[4]。在国内,王斌、Zhang等[5-6]对激光刀切法进行了研究,分别采用单目、双目线结构光方法实现了冰体横截面轮廓测量。

图3 激光刀切法进行冰体横截面轮廓测量原理图
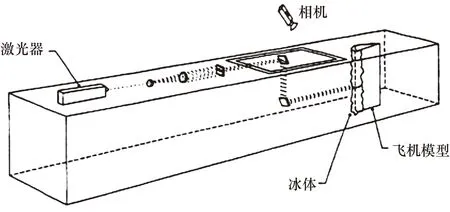
图4 NASA Lewis IRT风洞应用激光刀切法测量冰体横截面轮廓
激光刀切法只能测量冰体某一横截面处冰形,无法实现3D冰形测量。NASA将商业三维扫描仪用于冰体3D扫描[7](如图5所示),实现了风洞试验结冰体3D数字化,可用于CFD计算结果验证和飞机气动力评估。在实际应用中,为解决冰体三维扫描数据空洞问题,采用了在冰体表面喷涂显影剂的策略。喷显影剂使该方法只能用于试验结束后冰形测量,无法用于结冰生长过程中3D冰形在线测量。

图5 三维扫描仪用于冰形扫描
为实现在结冰生长过程中不喷涂显影剂的情况下测量结冰3D冰形,笔者针对霜冰对激光弱反射所产生的激光线图像对比度低、激光中心线提取精度低的问题,采用自适应阈值法确定光带边界的灰度阈值,并结合梯度重心法计算光带中心亚像素位置,实现了冰形轮廓线测量,再通过平移扫描实现了冰形三维测量,为实现结冰风洞3D冰形在线测量奠定了技术基础。
1 设计原理
1.1 测量原理
基于线结构光扫描的结冰冰形三维测量装置如图6所示,由激光器、摄像机、传送带、编码器和计算机组成。其中,冰块放置于传送带上;传送带承载着冰体进行一维移动实现冰体扫描;激光器安置于传送带上方,投射线结构光到冰块表面;摄像机安装于传送带上方,拍摄冰体表面线结构光光条图像;编码器安装于传送带的转动轴上,对传送带运动长度进行编码,并产生触发脉冲信号,编码器与摄像机连接;摄像机与编码器、计算机连接,根据触发脉冲进行成像,并将图像传输到计算机中进行处理。

图6 基于线结构光扫描的结冰冰形三维测量装置
冰形测量流程如图7所示,主要包括三部分内容:系统标定、图像采集及预处理、三维重建。其中,系统标定包括相机标定、激光平面标定,用于获取摄像机参数和激光平面方程参数;图像采集及预处理包括图像采集、预处理和激光中心线提取;三维重建主要根据系统标定结果计算单条激光线三维坐标,并根据传送带运动距离,对测量的多条冰形轮廓线进行拼接,得到冰形三维轮廓点云数据。
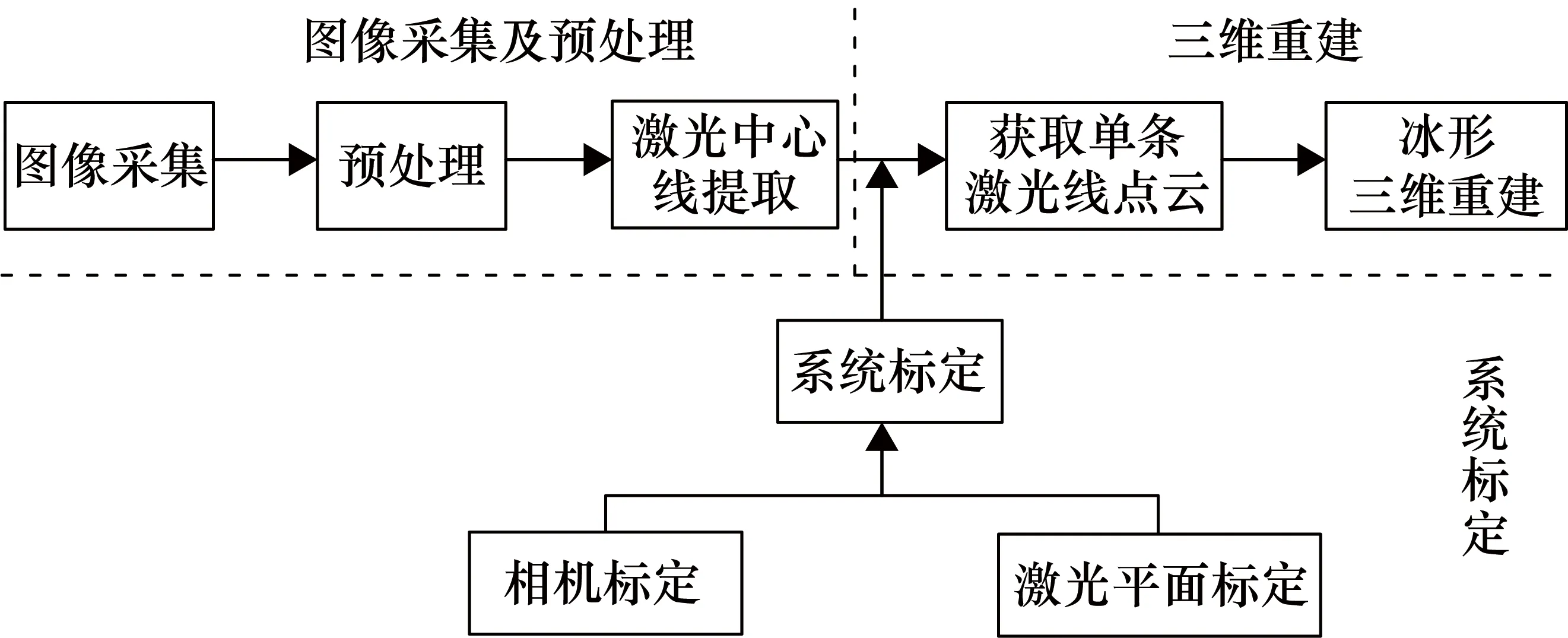
图7 冰形测量流程图
1.2 线结构光模型


图8 线结构光视觉传感器数学模型
摄像机透视投影模型可以表示为
(1)

设线结构光在摄像机坐标系下的方程为
ax+by+cz+d=0
(2)
已知摄像机的内部参数A和激光平面的式(2),由点P的图像坐标(u,v)可得其三维坐标,依次计算激光中心线上所有像素点的三维坐标,最终重建出整条冰形轮廓线。
2 算法设计与实现
2.1 系统标定
固定好摄像机和激光的相对位置后,利用平面靶标上特征点及对应的图像点进行局部坐标系到摄像机坐标系的转换,得到摄像机内参矩阵A。根据靶标平面与图像平面之间的同射变换获得结构光标定点在局部坐标系下的坐标,并统一到摄像机坐标系下,在此基础上拟合出光平面方程。
2.1.1 相机标定
本文采用张正友标定法[8],根据摄像机透视投影模型,利用已知特征点的图像坐标和世界坐标求解摄像机的透视矩阵H。根据旋转矩阵R的正交性,建立约束方程,求解出摄像机的内部参数和局部坐标系到摄像机的旋转平移矩阵。
在平面靶标上建立局部坐标系Oixiyizi(i=1,2,3,…,为标定板在不同位置摆放的次数),则靶标平面上特征点坐标与其图像坐标间的关系为
(3)

(4)

(5)
2.1.2 激光平面标定
如图9所示,O1uv为图像平面,结构光与Oixiyi相交形成光条Γ,它在像平面内的投影为φ。由式(3)可得
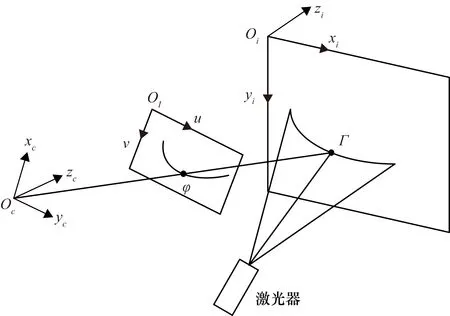
图9 求解结构光上点的三维摄像机坐标
[xiyi1]T=sH-1[uv1]T
(6)

(7)

在测量空间不同位置和角度多次移动平面靶标,用上述方法可求出摄像机坐标系下数量足够多的特征点坐标,采用最小二乘法拟合出激光平面。二维标定参照物及特征光条如图10所示。

图10 二维标定参照物及特征光条图像
2.2 激光中心线提取
激光中心线的提取是结构光测量中的关键步骤。目前,国内外学者提出了多种激光中心线提取方法,常见的主要有阈值法、极值法、灰度重心法和 Steger法等。其中,阈值法没有考虑光带的方向,容易在光带曲率变化较大处出现误判[9];极值法原理简单,运算速度较快,但是易受高频噪声干扰和光带分布不均匀的影响,导致定位精度降低[10];灰度重心法稳定性优于极值法,但该方法求得的激光中心位置主要取决于光带上灰度值较高的那部分像素,其准确性受激光光带能量分布集中性影响较大[11];基于Hessian矩阵的Steger法精度较高,但是需要计算光条法线方向,运算量大、提取速度慢、不易实现法线方向上的平滑滤波[12]。冰块特别是明冰对激光反射较弱、透射较强,透射光线会照亮激光光条邻近区域,使激光光条与邻近区域亮度差异减弱,导致光条波峰不明晰,难以准确提取激光中心线。此外,在测量过程中,冰体表面还会存在水膜,使冰体表面形成镜面反射,导致相机无法采集到高对比度的光条图像。
笔者提出了一种改进的激光中心线提取方法:先用自适应阈值法确定光带边界的灰度阈值,然后再结合梯度重心法[13-14]计算出光带中心亚像素位置。激光中心线提取的具体步骤如下。
① 用3×1的滑动窗口在图像列方向上滑动,计算滑动窗口下3个像素的灰度和,滑动窗口下面3个像素的灰度和取最大值时的窗口中心位置即为该列上光带中心的粗略位置。
② 在光带中心粗略位置的左右,根据光带的宽度范围,取一定宽度的像素区域,作为该列上光带的粗略宽度范围,光带宽度取15个像素,并对该范围内的像素灰度值进行幂次变换,减少灰度非正态分布和高频噪声对光带中心位置提取的影响。
③ 根据幂次变换后的光带粗略范围内的灰度值,用自适应阈值法确定光带边界处的灰度阈值,得到光带的准确边界。
激光器的光强分布沿光带延伸方向近似呈高斯分布,因此可用高斯分布的自适应阈值法对其进行二值化,其数学模型为
(8)
式中:a、b和c为常数,且a>0。以一定间隔等间距选取n列,采用大津法计算每一列的阈值。得到一些离散的阈值In后根据式(8)进行高斯拟合得到函数T(x),然后对原始图像按列进行自适应二值化处理,即可得到准确光带边界。
④ 对光带边界内的像素进行梯度重心计算,并得到该列上的光带中心点亚像素位置。
梯度G(i,j)为第i行与第i+1行中间位置处的梯度值,其计算公式为
(9)


(10)

(11)
对图像的每一列进行上述处理,即可得到每列上的激光中心线精确位置,从而形成一条亚像素精度的光条。图11为圆柱形冰块中心线提取示例。
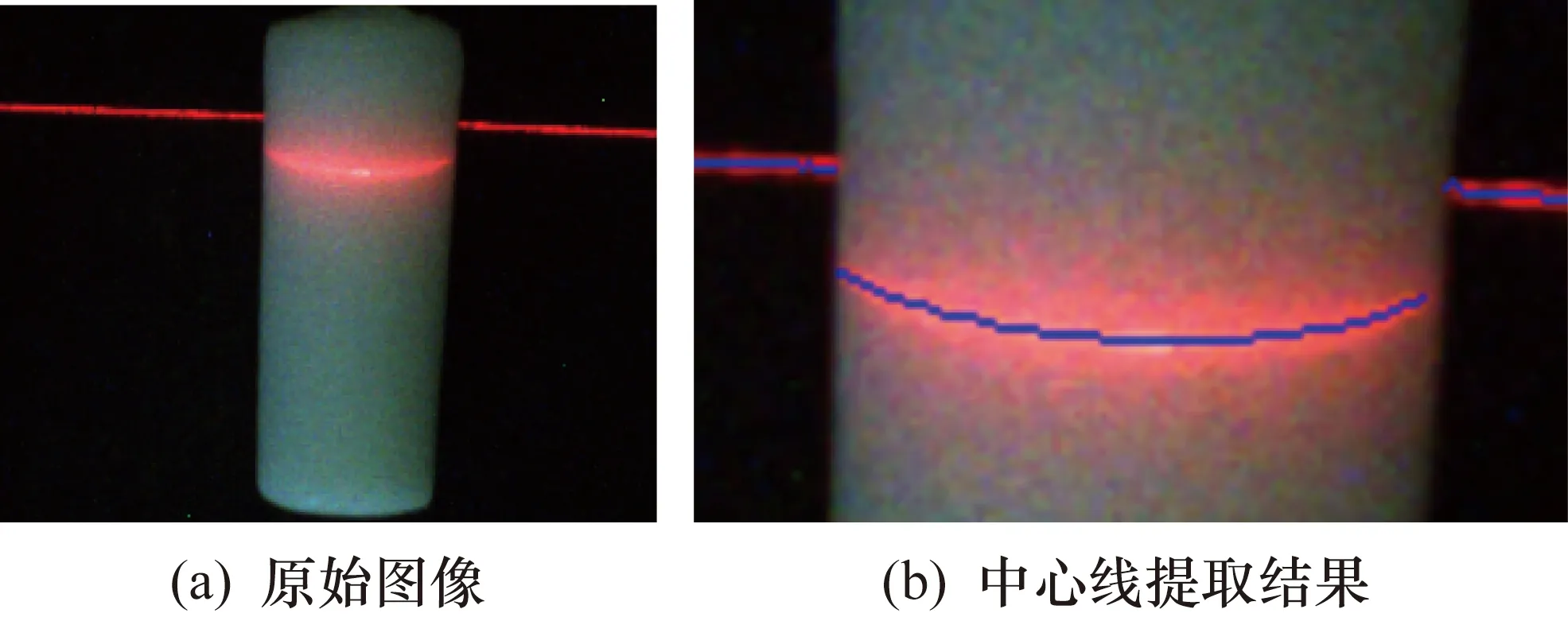
图11 原始图像及中心线提取结果
3 实验结果与分析
实验采用分辨率为640像素×480像素的彩色工业相机以及波长637 nm、功率100 mW的激光模组组成线结构光视觉传感器,搭建的实验平台如图12所示。
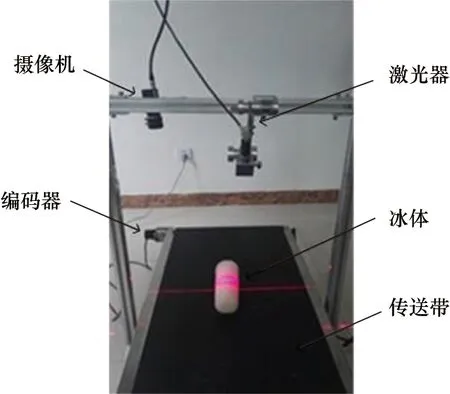
图12 硬件实验平台
摄像机标定的内参矩阵为

线结构光在摄像机坐标系下的平面方程的系数为
a=-0.022,b=-0.968,c=0.079,d=-105.634
试验中圆柱形冰块的半径为30.08 mm,基于本文算法对冰形轮廓线进行测量,并用最小二乘法拟合圆,求出拟合圆的半径与实际值进行对比,相对误差为0.157 mm。图13为测量值与实际值对比。测量值的最大误差不大于0.97 mm,对比Zhang等[6]最大测量误差不大于1.5 mm,本文测量算法取得了更好的效果。传送带每走1 mm,编码器触发一次相机采集图像,将重建的多条激光中心线逐行拼接,即可得到整个冰面型轮廓,经点云渲染后的冰面型三维重建效果图如图14所示。
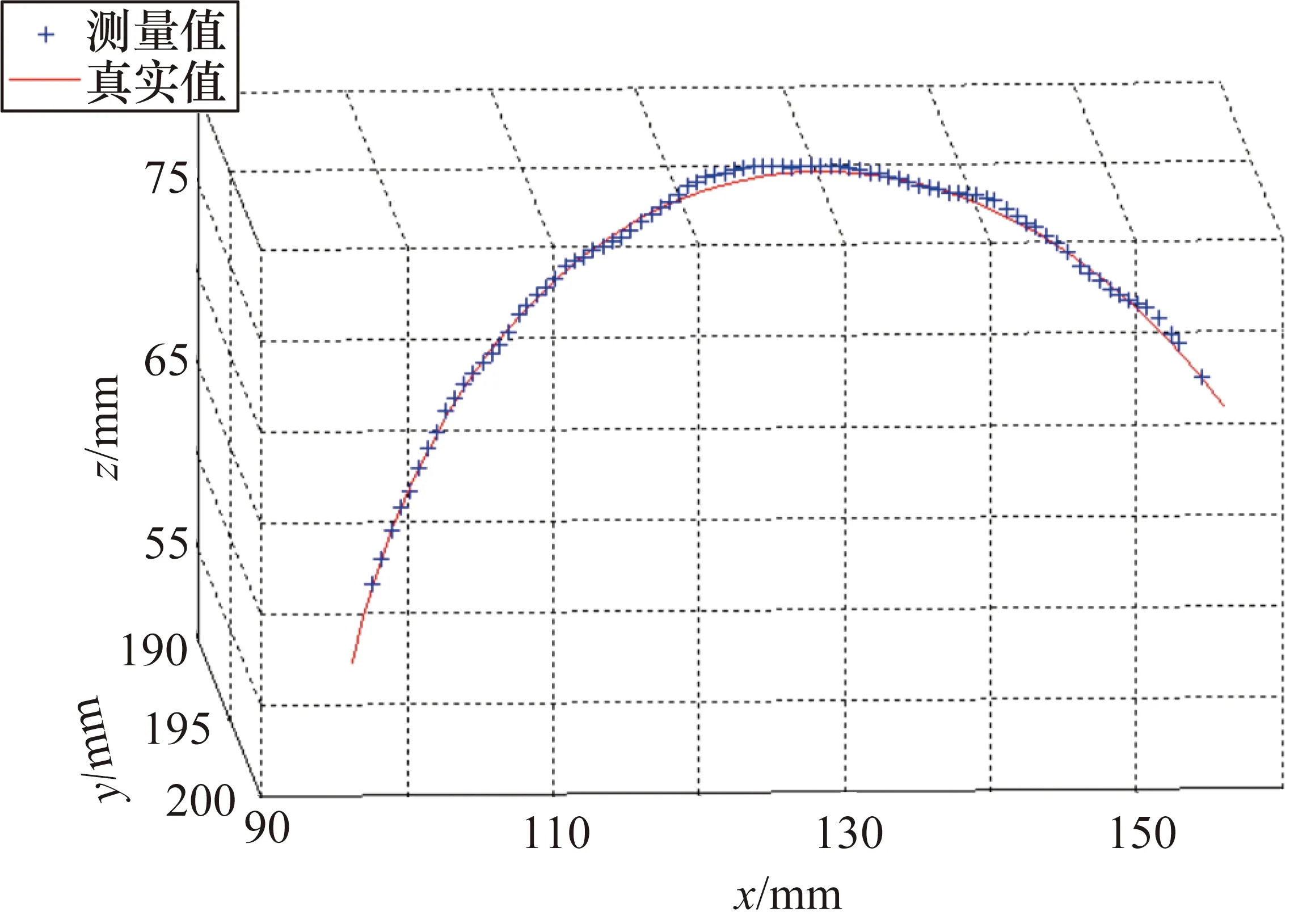
图13 测量值与实际值对比

图14 冰面型三维重建效果图
影响本系统对冰形测量精度的主要因素有3个方面:构成系统的硬件设备、结构光测量系统标定精度和激光中心线提取精度。对于冰形轮廓测量而言,测量误差主要源于激光中心线提取误差。影响激光中心线提取误差的根本原因是冰块对激光反射较弱,透射较强,难以得到高对比度激光线图像。镜头前端未加滤波片导致环境中的杂散光进入相机降低了线激光图像对比度;激光近似垂直放置,导致只有一部分反射光能够被相机采集到,光能损失较大。这些因素共同导致了激光线图像对比度不高和图像信噪比低等问题。
4 结束语
基于线结构光扫描开展了结冰冰形三维测量的研究。针对未喷涂显影剂的、低对比度的冰体图像,采用自适应二值化法精确确定激光光带边界,并用梯度重心法提取激光光带亚像素中心位置,根据标定的摄像机与激光平面之间的位置关系,计算出冰面激光线三维坐标,采用编码器控制相机采集频率,借助运动平台,进行了圆柱形冰块三维轮廓的还原,证实了采用线结构光进行冰面型轮廓三维重建的可行性,为后续开展结冰风洞结冰生长过程3D冰形在线测量试验研究奠定了技术基础。
下一步主要工作是在结冰引导风洞开展相关试验测试,并针对透明的明冰,研究激光激发辐射成像方法,彻底解决透明冰体线结构光成像中存在的光线透射、镜面反射等问题。
猜你喜欢
作文周刊·小学一年级版(2022年24期)2022-06-18
日用电器(2020年9期)2020-12-09
消费导刊(2020年21期)2020-06-30
动漫界·幼教365(小班)(2019年10期)2019-10-28
扬子江(2019年1期)2019-03-08
小天使·一年级语数英综合(2019年2期)2019-01-10
计算机技术与发展(2018年9期)2018-09-21
青岛画报(2018年4期)2018-07-10
中小企业管理与科技·中旬刊(2017年10期)2017-11-06
小学生导刊(低年级)(2017年1期)2017-06-12
