驾驶人视觉负荷研究综述
2023-01-03 12:03秦雅琴赵鹏燕谢济铭王锦锐
昆明理工大学学报(自然科学版) 2022年6期
秦雅琴,赵鹏燕,谢济铭,王锦锐
(昆明理工大学 交通工程学院,云南 昆明 650500)
0 引言
道路交通的高速发展给人们的生活带来了极大的便利,但同时也引发了严峻的交通安全问题.中国国家统计局发布的交通事故数据显示,我国每年因交通事故受伤和死亡的人数在31.2万人左右[1],且有逐年增长的趋势;世界各国交通事故也呈相同的发展态势,根据2018年世界卫生组织提供的数据,全球每年因交通事故死亡的人数高达130万,道路交通安全问题已经成为了一种全球性问题[2].为探究道路交通事故的发生机理,国内外学者主要从驾驶人的视觉、认知和制动3个方面进行了驾驶负荷研究.其中,驾驶人的视觉负荷对驾驶性能各项表征指标的影响是最大的[3].
视觉负荷研究已经开展了数十年,利用中国知网检索关键词“驾驶人视觉负荷”,Web of Science核心合集数据库检索关键词“visual load*”,将检索范围限制到交通学科,结果如图1所示.可以看出,现有研究中对驾驶人视觉负荷的研究正在逐年增长,2010年以前,驾驶负荷的研究还处于起步阶段,针对其更加细化的视觉负荷研究更是寥寥无几.随着负荷理论体系的逐步完善,视觉负荷的研究成果证实了视觉信息在道路交通安全方面的重要作用.近十来,交通领域各学者开始加大对视觉负荷研究的关注,并取得了大量研究成果[4-8],目前仍是比较热门的研究方向.
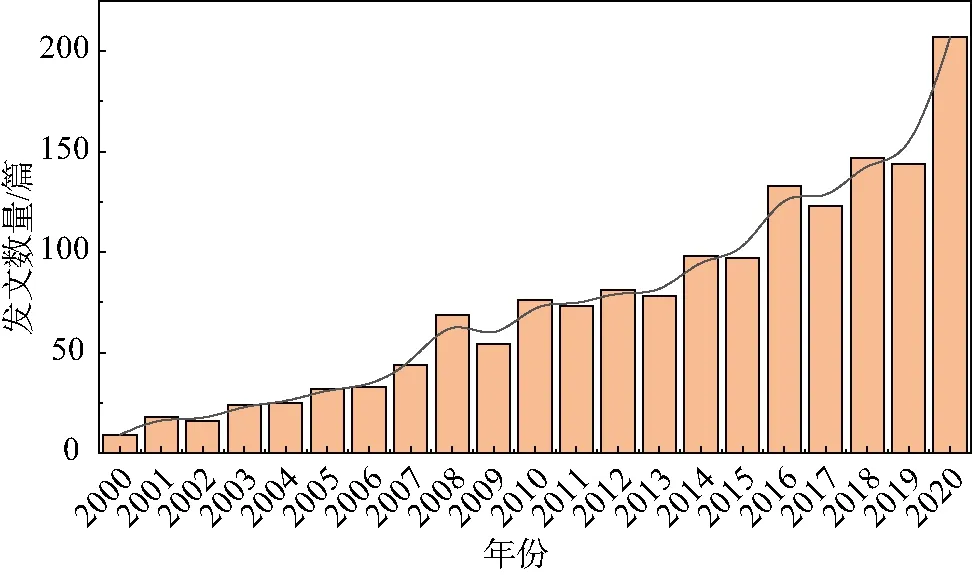
图1 发文趋势图Fig.1 Trend chart of article publication
使用CiteSpace软件对检索的文献进行进一步分析.表1为驾驶人视觉负荷研究领域的主题词出现频次统计表.图2为关键词聚类图谱.由表1和图2分析可以看出,我国在交通领域关于“视觉负荷”的研究主要从驾驶人的动态视觉特性、驾驶人视觉负荷及交通安全等方面展开.
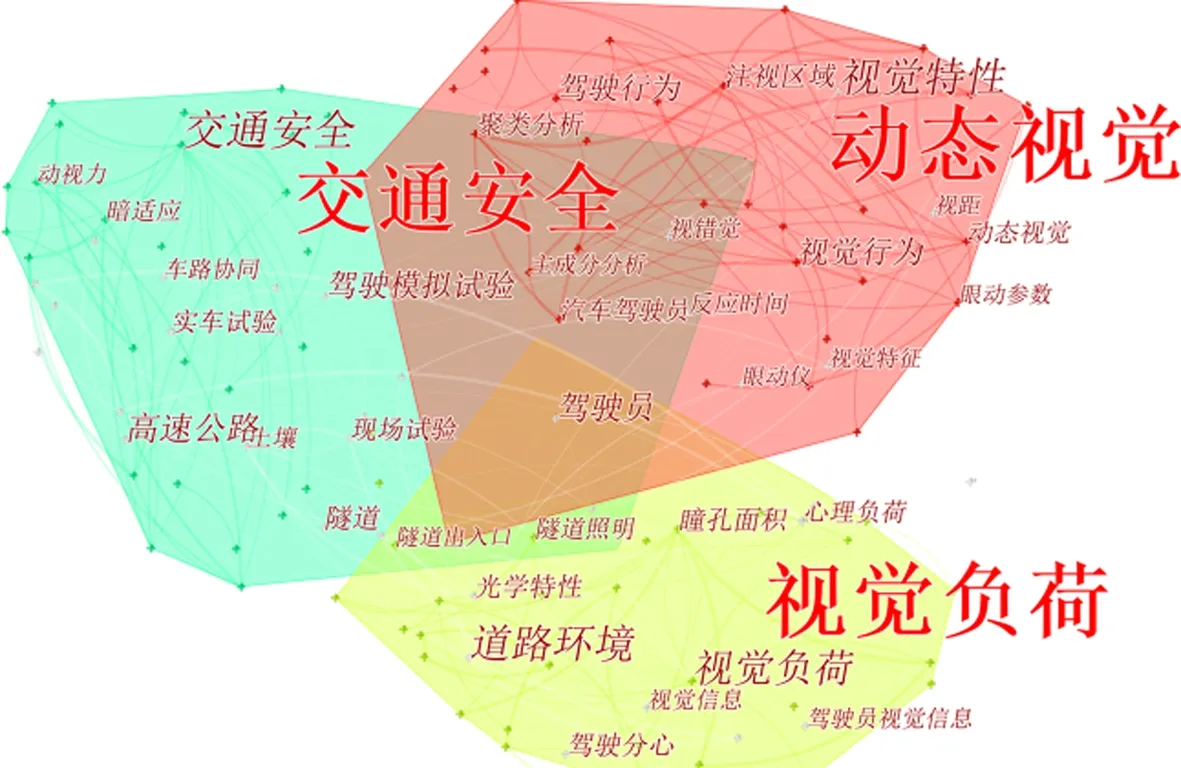
图2 驾驶人视觉负荷研究关键词聚类Fig.2 Keywords cluster of driver’s visual workload
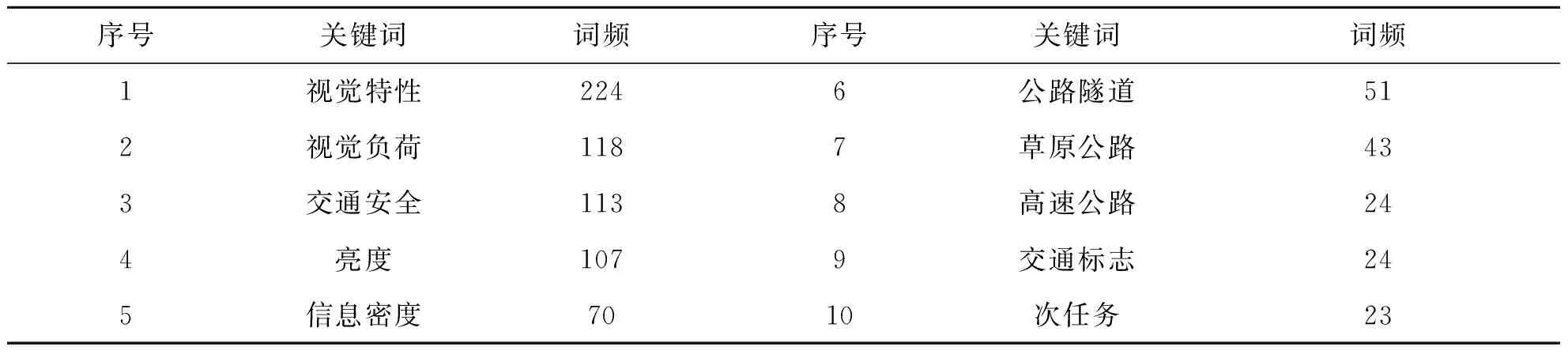
表1 驾驶人视觉负荷研究频次前10的研究主题Tab.1 Top 10 research topics of driver visual load research frequency
虽然关于驾驶人视觉负荷的研究已经开展了数十年,但是由于衡量指标选择较为单一,且驾驶负荷的形成机理较为复杂,对于视觉负荷的研究仍然缺乏系统性的总结和梳理.因此,本文对国内外道路交通安全领域中关于驾驶人视觉负荷的重要研究成果进行系统介绍,探究驾驶人视觉负荷的影响因素及其研究方法,梳理视觉负荷的应用领域,并对视觉负荷的未来研究趋势进行了展望.
1 视觉负荷与道路交通安全
1.1 驾驶人视觉特性
驾驶人在行驶过程中通过视觉搜索来获取交通信息,具体表现为注视、扫视和眨眼,其视觉搜索行为随交通环境的变化而呈现出一定的规律[9].驾驶人的视觉特性分析是评价驾驶人视觉负荷的工作基础,通过对比驾驶人视觉特性参数的变化规律可以反映驾驶人的视觉负荷.其中,驾驶人的眨眼频次及瞳孔直径变化可以直观表征驾驶人所承受的视觉负荷,其他视觉特性评价指标通过影响驾驶人视觉信息的获取难度及获取数量可以间接表征其视觉负荷[10].驾驶人视觉特性与视觉负荷的关系如图3所示.由于驾驶人的视觉特性参数可以直接通过眼动仪采集,信息获取较为直接、准确,因此很多有关视觉负荷的研究都利用眼动仪采集驾驶人的视觉参数进行特性分析.驾驶人视觉特性评价指标所能表征的视觉负荷的关系如表2所示.
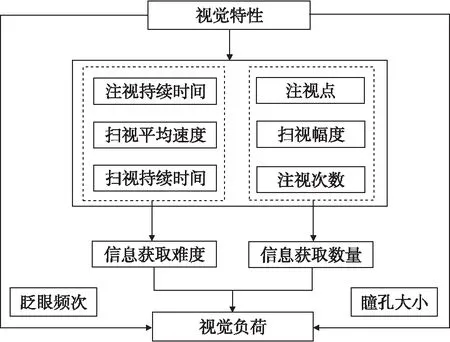
图3 驾驶人视觉特性与视觉负荷的关系Fig.3 Relationship between driver’s visual characteristics and visual load
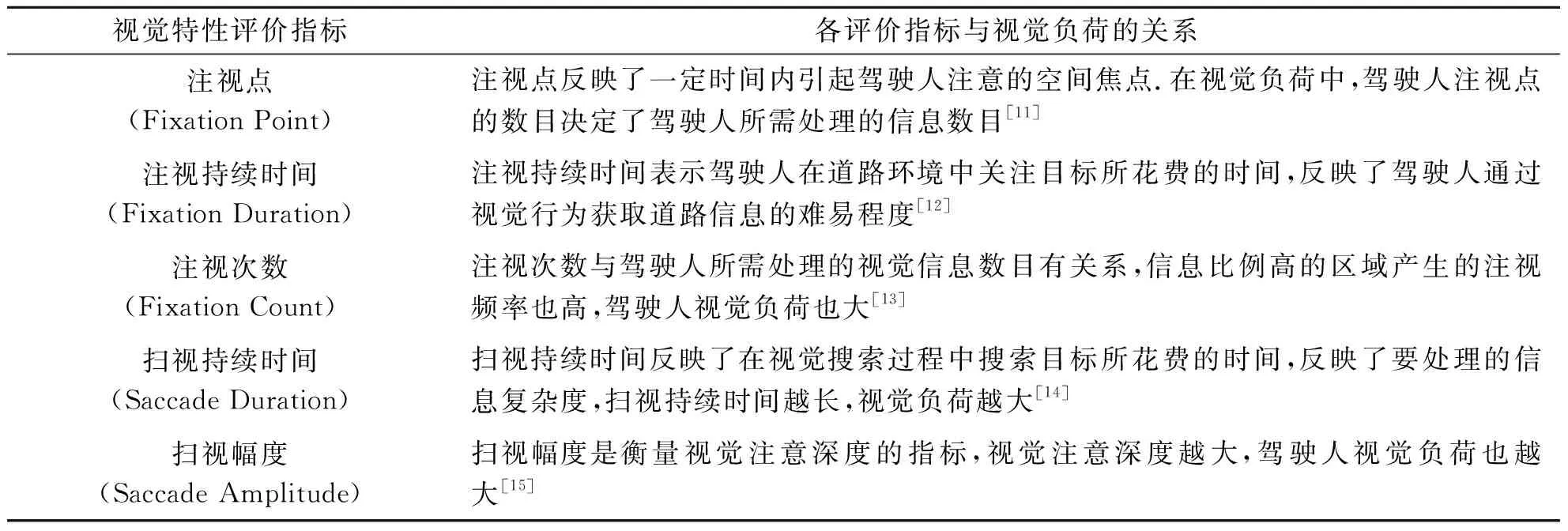
表2 视觉特性评价指标及其内涵Tab.2 Evaluation index of visual characteristics and its connotation
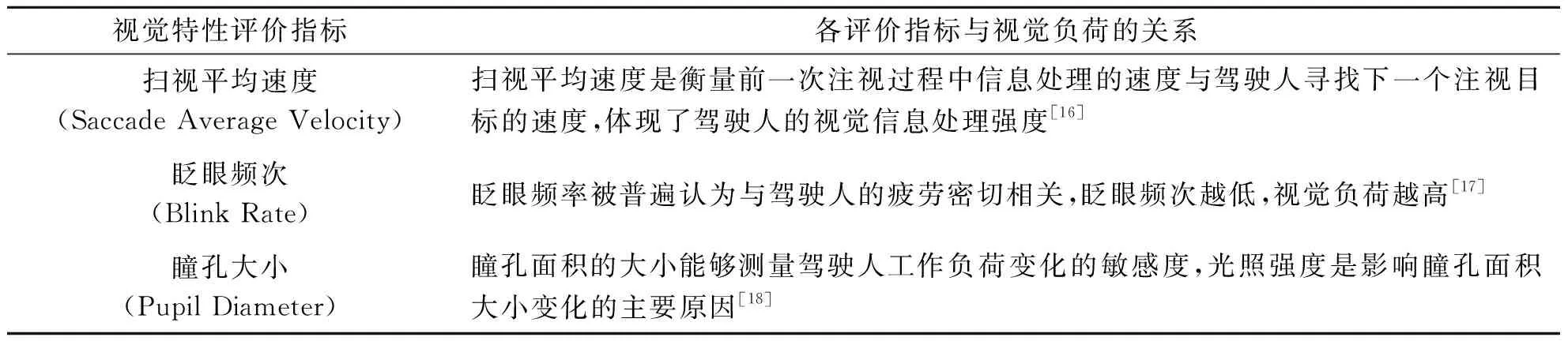
续表2
1.2 视觉负荷内涵
视觉负荷的内涵主体由视觉信息接收源和视觉信息刺激源2个部分组成.完成驾驶任务过程中,驾驶人是视觉信息的接收源,其所处的交通环境即为视觉信息刺激源.驾驶人需要不断地通过视觉搜索行为从交通环境中获取视觉资源,提取有用的交通信息,指导驾驶决策.但是驾驶人的视觉资源获取能力是有限的,当需要识别的信息过多或信息识别较为困难时,驾驶人需要消耗的视觉资源就会增大.因此,视觉负荷可以理解为在行车过程中,驾驶人通过注视与扫视等视觉行为,搜索交通环境中的驾驶信息所消耗的视觉资源,其内涵为驾驶人在视觉信息加工过程中,视觉系统通道的信息处理强度[19].视觉负荷是影响驾驶人视觉信息处理能力的关键因素[20],不仅能衡量驾驶人行车过程中的视觉舒适度[7],同时对保障行车安全也有重要意义[21].
1.3 视觉负荷对交通安全的影响
行车过程中,大约80%的交通信息都是驾驶人通过视觉搜索获取的,持续不断的视觉搜索过程将会增加驾驶人的视觉负荷[22].当视觉环境较为复杂时,驾驶人的信息搜索工作也会变得繁重,需要接受处理的信息量就越多,驾驶人的视觉负荷也越大,长时间行驶在这种环境中会导致驾驶人的信息处理能力达到极限,从而出现反应迟钝或判断失误等危险驾驶行为[23].反之,当视觉环境较为简单时,驾驶人需要处理的信息量少,产生的视觉负荷也会相对较小[24].但是当视觉负荷较小时,驾驶人视觉信息刺激强度不够,容易产生视觉疲劳而导致交通事故[25].因此,从安全驾驶角度分析,确保驾驶人的视觉负荷处于一个适当的阈值对行车安全十分重要[26].
2 视觉负荷的影响因素
从视觉负荷的生成机理来看,驾驶人作为视觉信息接收源,其自身因素,如驾驶人视觉搜索模式、年龄、人格特质、驾驶经验等都会对视觉负荷产生影响.此外,由于驾驶任务的复杂性,交通环境作为视觉信息的刺激源,也会对视觉负荷产生较大影响.如图4所示,本文从驾驶人视觉负荷的生成机理出发,将其影响因素从信息接收源和信息刺激源2个方面进行了分类,2类因素在驾驶过程中共同存在且相互影响.
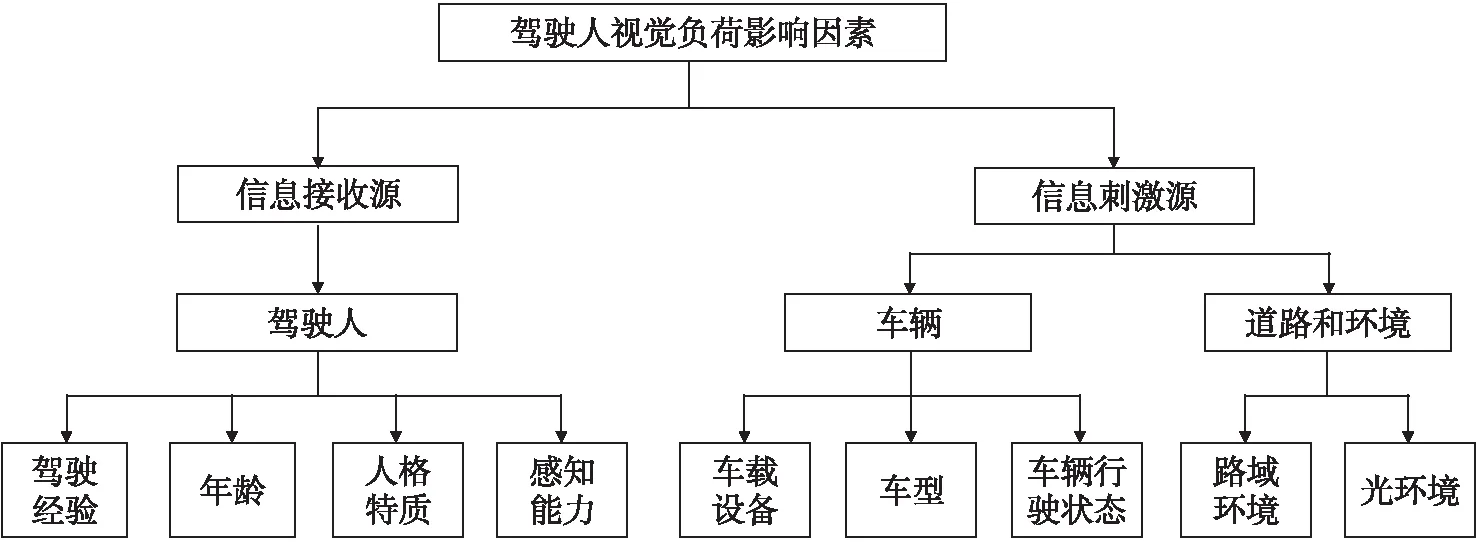
图4 驾驶人视觉负荷影响因素Fig.4 Influencing factors of driver’s visual load
2.1 驾驶人
在驾驶过程中,驾驶人通常需要在短时间内收集、筛选驾驶环境中的大量交通信息,并将这些信息进行加工、处理,以便快速做出反应与决策[27].在这一过程中,驾驶人会受到环境认知、决策处理与驾驶操作能力的局限,这些局限主要体现在驾驶人的视觉搜索模式、年龄、人格特质及感知能力等方面.在这些核心因素的影响下,不同驾驶人感知到的视觉信息也不同,且与实际驾驶环境信息存在一定的差异[28].因此,即使在同一驾驶环境中,不同驾驶人的视觉负荷也存在显著差异.
2.1.1 驾驶经验
新手驾驶人在进行视觉信息搜索时,由于缺乏驾驶经验,视觉搜索过程中搜索广度小、注视区域多、扫视幅度小、扫视速度快[29],频繁的信息搜索行为严重增加了驾驶人的视觉负荷[30].相比于新手驾驶人,有经验的驾驶人视觉搜索模式更灵活,从驾驶经验中获取的视觉搜索技能优化了驾驶人的视觉搜索模式[31],弥补了普通驾驶技能培训的不足[32].因此,相比于新手驾驶人,经验较为丰富的熟练驾驶人在复杂的动态视觉空间中视觉负荷更小,主要表现为对物体跟踪更为准确,注视熵率值更低[33],检测关键视觉信息更为精准,并且能够在不转移驾驶任务注意力的情况下检测到可能发生危险的情境[34].
此外,将有经验的驾驶人的视觉信息搜索轨迹进行重现,可以让新手司机跟随该轨迹路径进行信息搜索,从而完成对新手司机的视觉搜索训练.训练完成后,新手驾驶人学会了如何在相似场景中调动对应的视觉搜索模式[35],因此,驾驶经验不足的驾驶人可以通过视觉搜索训练来改善信息搜索技能[36].
2.1.2 年龄
视觉负荷形成过程中会受到驾驶任务处理能力的影响.随着年龄的增长,老年驾驶人身体机能开始退化,导致其任务处理能力下降,有效视野范围缩小,视觉适应能力降低[37].因此,视觉负荷在驾驶人年龄影响下的总体趋势表现为老年驾驶人视觉负荷大于青年驾驶人.在复杂的交通环境中,如交叉口,老年驾驶人对周边视野的信息搜索能力会随着年龄的增长而衰退[38],老年驾驶人的视觉负荷会更高[39].为了改善上述问题,Waard等[40]认为减少一些不必要的视觉信息元素,并限制老年人的行驶车速,可以保证“人-车-路-环”信息都能够得到妥善处理,从而降低老年驾驶人的视觉负荷,提高行车安全性.
2.1.3 人格特质
驾驶人的人格特质作为一种影响驾驶安全的潜在因素[41],在一定程度上可以反应驾驶人所能接受的工作负荷[42],其中也包括视觉负荷.激进型(Aggressive)驾驶人对周围环境关注较少[43],与愤怒型(Angry)驾驶人相似[44],由于行驶过程中频繁且快速地出现换道、加速、超车等驾驶行为,这些激进的驾驶行为增加了其视觉负荷,同时还增加了交通事故的发生概率.保守型(Cautious)驾驶人在决策前会更谨慎地观察周边环境[45],与激进型驾驶人相比,行驶过程中注视区域和视觉搜索范围更广,注视点更加密集,因此保守型驾驶人的视觉负荷大于激进型驾驶人[46].人格特质对视觉负荷的影响是客观存在且难以改变的,但是随着驾驶辅助技术的发展,可以针对不同人格特质的驾驶人进行个性化设计,制定符合其驾驶习惯的辅助系统,在驾驶过程中指导其驾驶行为,从而避免上述激进驾驶行为,在保障规范驾驶的基础上也能有效减小驾驶人视觉负荷[47].
2.1.4 感知能力
感知能力影响了驾驶人在行车过程中对本车及周围车辆的驾驶状况判断,进而影响了驾驶人的视觉信息搜索模式.Patoine等[47]通过研究驾驶人的视觉负荷与感知能力的作用关系,证明了感知能力与视觉负荷是影响驾驶安全的2个重要因素.李青等[48]进一步研究了驾驶人感知能力中的风险感知能力,将驾驶人的风险感知能力分为3个等级:安全型、一般型及危险型,研究发现安全型驾驶人的注视时间相比其他2个类型的驾驶人注视时间更长.这是因为安全型驾驶人在察觉到危险后,对外界环境的风险评估结果总是高于心理阈值,认为继续执行当前的驾驶状态难以应对危险[49],此时,安全型驾驶人倾向于更细致、更全面地观察周围驾驶环境,谨慎地调整自己的驾驶行为,采取避险措施[50].由此来看,风险感知能力较强的驾驶人在行驶过程中可能会承受更大的视觉负荷.
2.2 车辆
车辆对驾驶人视觉负荷的影响主要取决于车载设备及车型等的设计,其中,车载设备在实现驾驶辅助功能的同时也会分散驾驶人的视觉注意力,从而增加驾驶人的视觉负荷;车型的不同会影响驾驶室内驾驶人的视觉搜索区域;此外,车辆的行驶状态决定了驾驶人视觉信息接收的速度,很大程度上影响了驾驶人的视觉负荷.
2.2.1 车载设备
车载系统在实现其驾驶辅助功能时,会导致驾驶人转移部分注意力到车载设备上,这一转移过程及驾驶人在查看车载装置传递的信息时,都会增加驾驶人的视觉负荷[51].为了减少驾驶人的视觉负荷,一方面可以考虑缩短驾驶人视觉注意力的转移路径,如将车载导航设备安装在驾驶人视野前方的置物台上[52],其中,AR导航可以直接将行驶路径投射到道路上,避免了驾驶人视线在导航设备和行驶道路之间来回切换.与普通导航相比,使用AR导航时,驾驶人的视觉注意力转移路径更小,视觉负荷也更小[53].另一方面,可以减少驾驶人在获取车载信息时所需的视觉资源.Muoz等[54]研究了车载装置的3种工作模式对视觉负荷的影响,包括无交互设计、语音交互界面、视觉交互界面,研究发现在使用视觉交互界面的车载装置时,发生安全事故的概率是无交互设计的3倍[55].因此车载系统在设计时需要尽量缩短驾驶人视觉注意力的转移路径或者改变车载信息的传递方式以减少驾驶人视觉需求[56].
2.2.2 车型
不同车型对驾驶人的视觉负荷也有一定影响,车辆类型会影响驾驶人在驾驶室内眼部接收到的光照强度而影响驾驶人视觉负荷.陈云等[4]利用瞳孔面积变化速度衡量了小客车和大货车驾驶人的视觉负荷,分析了不同车型对视觉负荷的影响,研究结果表明,在隧道入口段处大货车驾驶人的视觉负荷大于小客车驾驶人视觉负荷.王首硕等[5]以驾驶人的瞳孔面积变化速率为视觉负荷的评价指标也得出了相同的结论,并针对大货车的设计提出了改进挡风玻璃透光性的建议.
2.2.3 车辆运行状态
车辆正常行驶时,驾驶人的视觉负荷多取决于驾驶人自身因素及驾驶环境.当车辆处于应激响应场景中,即车辆需要主动避险时[57],驾驶人的注视时间会迅速减小,周边视野区域的扫视行为会增加,导致驾驶人的视觉负荷激增.此外,车辆进行换道、超车、加速时,驾驶人必须调整当前驾驶行为,首先需要收集当前的交通环境信息,预测本车与周围车辆的横向距离、纵向距离、车道占有率与周围车辆的速度差等[58],以免发生碰撞,这一信息搜索过程会导致视觉负荷增大.其中,在车辆超车过程中,驾驶人为了搜索关键交通信息,会频繁地在初始车道和目标车道之间转换注视点,并增加注视时间和扫视时间,寻求适当的超车时机[59],增加了驾驶人的视觉负荷.车辆换道研究中,白婧荣等[60]将换道过程进行了细分,发现换道操作期驾驶人视觉负荷最大,车辆出现明显的加速行为,但当车速过大时,为了确保行车安全,驾驶人倾向于尽可能多地接收视觉信息,此时驾驶人的扫视行为会增加,视觉负荷也随之增加.
2.3 道路和环境
随着我国经济的快速增长,城市化进程不断加快,交通环境也变得越来越复杂多样,导致驾驶人行车过程中的工作负荷发生了巨大的变化.从视觉信息刺激源角度分析,道路环境越复杂,驾驶人的视觉负荷也越大.
2.3.1 路域环境
路域环境的复杂程度决定了驾驶人视觉信息获取的难易程度.路域环境较为简单时,驾驶人可以减少视觉搜索行为并简化视觉信息的加工过程,从而降低视觉负荷[61].城市道路由于路侧开发、交通组成等的影响,成为了路域环境最复杂的道路[62],驾驶人行驶过程中需要高度注意周围交通环境并持续保持视觉搜索,驾驶人的视觉负荷也最大[63].高速公路相比于城市道路,道路较为封闭,车辆进出管控更为严格,交通运行状况更为简单,驾驶人视觉搜索行为明显减少,视觉负荷也更小[64].景区道路相比于城市道路,交通量较小,行车速度更慢,道路设计时更注重视觉舒适性和美感,驾驶人视觉信息加工更简单,因此景区道路上驾驶人视觉负荷小于城市道路[65].为减小路域环境对驾驶人造成的视觉负荷,分离路侧干扰、减少路侧功能开发等措施都能降低路域环境的复杂度,从而减小驾驶人的视觉负荷.
同时,路域形式的不同会影响驾驶人的视觉心理负荷[66].山区公路受到地形制约,路域形式按照空间郁闭程度可以分为开敞式、半郁闭式及郁闭空间3种[67].在开敞式的道路上行驶时,驾驶人视野开阔,注视范围大,行驶过程中较为放松,驾驶人的视觉负荷最小[68];在郁闭式道路上行驶时,路侧多为高陡的挖方边坡,驾驶人视野范围狭窄,行驶过程中较为压抑,驾驶人的视觉负荷也最大[69].因此,在道路勘测设计阶段需要慎重考虑道路的选线问题,尽量保证道路修建在较为开敞的空间中,可以减小行车过程中驾驶人的视觉负荷.
此外,道路线形在行驶过程中有一定的视线诱导功能[70],但是复杂的道路线形会增加驾驶人的视觉负荷[71].相比于直线路段,弯道路段驾驶人的注视点及注视转移比率为直线路段的3倍[72],且随着半径的增大,视觉任务呈现先增大后减小的趋势.对比弯道行驶过程中驾驶人的注视点的分布,利用熵值法研究发现驾驶人在右转弯时的视觉负荷小于左转弯,驾驶情况也更稳定[73].因此,提高道路线形设计的合理性,以满足实际驾驶中所需的视线诱导并减小视觉负荷十分必要.
2.3.2 光环境
光环境对驾驶人视觉负荷的影响主要出现在隧道路段.进出隧道过程中的明暗适应会增加驾驶人的视觉负荷,这一过程中发生的亮度变化会导致驾驶人瞳孔大小随之变化,瞳孔的快速变化会增加驾驶人的视觉生理负荷[74].在通过隧道时,驶入隧道比驶出隧道更容易给驾驶人造成视觉不适[8],加之隧道内环境较为封闭,驾驶人暗适应比明适应更加困难,因此隧道入口洞内的视觉负荷是最大的[75].增加时段影响因素后,通过对比驾驶人瞳孔面积平均增长率发现,在隧道入口区域驾驶人黄昏时刻的视觉负荷大于正午的视觉负荷[76].在隧道内部路段,照明灯光带及侧墙构成了驾驶人的主要视觉环境,研究发现,红色灯光带引起的视觉负荷在保证驾驶舒适性的基础上可以提供给驾驶人视觉刺激,起到缓解隧道催眠的作用;Kircher等[3]对隧道壁面的颜色及亮度进行了研究,发现浅色隧道墙视觉负荷更小,同时隧道壁面弱光照优于强光照,可用于优化隧道照明环境,降低视觉负荷.因此,为减小光环境对驾驶人视觉负荷的影响,在隧道出入口通常设置减光设施,降低进出隧道过程中的明暗对比,以减少驾驶人的瞳孔变化,在隧道内部路段往往会通过改善灯光及墙壁的颜色来调节驾驶人视觉负荷.
除了上述的道路环境,气候条件很大程度上影响了驾驶人对外界信息获取和处理的难度,从而影响了驾驶人的视觉负荷.当车辆在冰雪路面上行驶时[77],驾驶人的平均眨眼持续时间、扫视幅度都表现出明显的波动性,瞳孔直径随着冰雪路段的长度而变大[78],驾驶人视觉负荷也变大.此时,驾驶人的感知车速会略低于实际车速.雾天、雨天等恶劣天气影响下,驾驶人的有效视野范围会降低[79],易导致驾驶人操作行为发生变化,此时,驾驶人在进行交通信息搜索时,会频繁注视仪表盘及正前方道路,并来回进行扫视行为,其承受的视觉负荷会增加.
3 驾驶人视觉负荷的评测方法
驾驶人行车过程中产生的视觉负荷是多因素、多信息加工共同作用的结果.目前针对驾驶人视觉负荷的评测方法主要有传统的主观评价法、双任务法和生理参数测量法,随着计算机技术的发展,逐渐有人利用机器学习、计算机视觉等对驾驶人的视觉负荷进行研究.
3.1 传统评测方法
传统的研究方法主要通过实车实验、驾驶模拟实验和计算机仿真3种实验手段实现.其中,主观评价法主要反应的是行车过程中驾驶人的视觉感受,不受实验手段的限制.其次,双任务法要求行车过程中同时执行其他任务,为了保障实验的安全,双任务法一般通过驾驶模拟实验展开研究.生理参数测量法由于需要佩戴生理心理数据采集设备,为保证实验安全多采用驾驶模拟实验,仅部分研究采用实车试验.为了保证实验结果的准确性及实验过程的安全性,以上3种方法多结合使用,互相验证,3类方法的优缺点如表3所示.
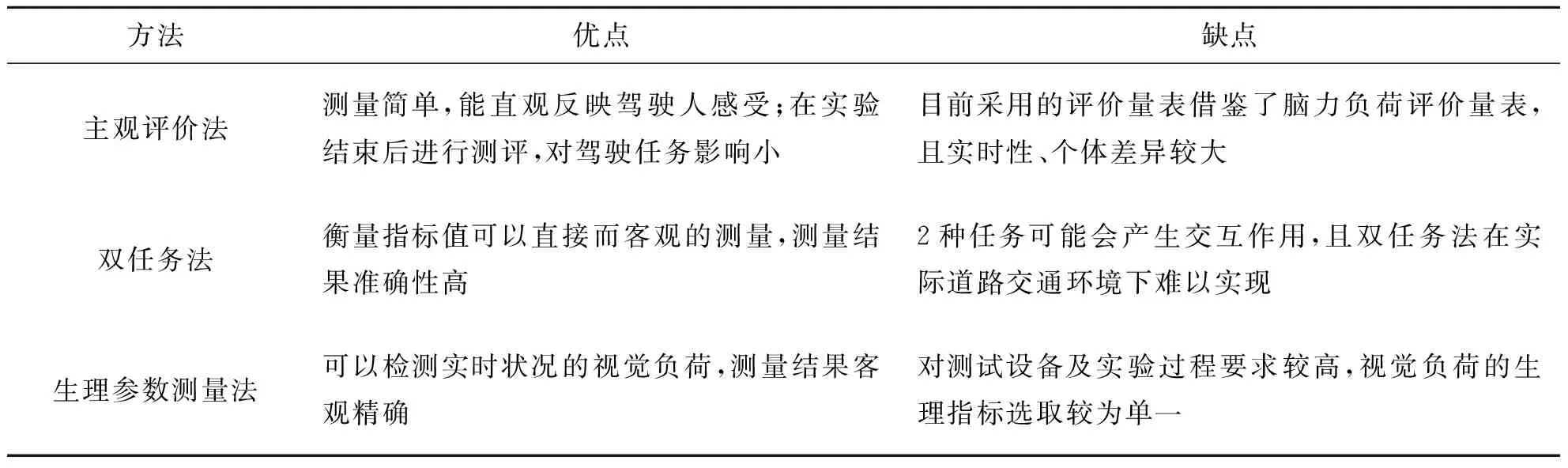
表3 视觉负荷传统评测方法的优缺点Tab.3 Advantages and disadvantages of traditional research methods for visual load
3.1.1 主观评价法
主观评价法通过调查驾驶人在驾驶过程中的感受来评价其视觉负荷.常用的调查方法包括美国国家航空航天局任务负荷指数量表(NASA-Task Load Index,NASA-TLX),人体工学评价问卷(Ergonomics Evaluation Questionnaire,EEQ)及情境意识全局评估技术(Situation Awareness Global Assessment Technique,SAGAT).其中,NASA-TLX最早是用来评价脑力负荷的[80],在视觉负荷研究中,侧重于评价驾驶人在视觉次任务影响下的绩效水平[81-83].EEQ的评价指标里新增了视觉感知需求,一般与NASA-TLX量表结合使用[82].SAGAT能区分不同实验情境下驾驶人的主观感受,在视觉负荷研究中能很好地反映驾驶人对驾驶场景的视觉感受[83].此外,Konstantopoulos等[81]录制了带有驾驶人视觉搜索轨迹的视频,实验人员通过观察这些视频,利用问卷调查评价视频中驾驶人的视觉负荷.由于主观评价法易受个体差异的影响,一般不单独使用,多与双任务法及生理参数测量法结合使用.
3.1.2 双任务法
双任务法在视觉负荷的研究中主要是在驾驶主任务中增加视觉次任务,研究次任务干扰情况下,驾驶人的反应时间及准确率.其中,反应时间越短,准确率越高,次任务导致的视觉负荷也更小.目前视觉次任务主要采用改变视野中的色块像素颜色[84]、操作触屏[84-85]、使用手机[86]、改变注视物体出现的角度[87]等.例如,Neyens等[88]的研究中,通过计算驾驶人眼睛离开路面的时间来衡量使用手机和操作车载设备对驾驶人视觉负荷的影响;Guo等[89]设计的实验要求驾驶人在驾车过程中选择距离最近、评价最好且价格最划算的餐馆,餐馆信息通过屏幕呈现,驾驶人需要读取屏幕上的餐馆信息并做出选择,以错误率来评价视觉次任务的难度对驾驶人造成的视觉负荷大小.
3.1.3 生理参数测量法
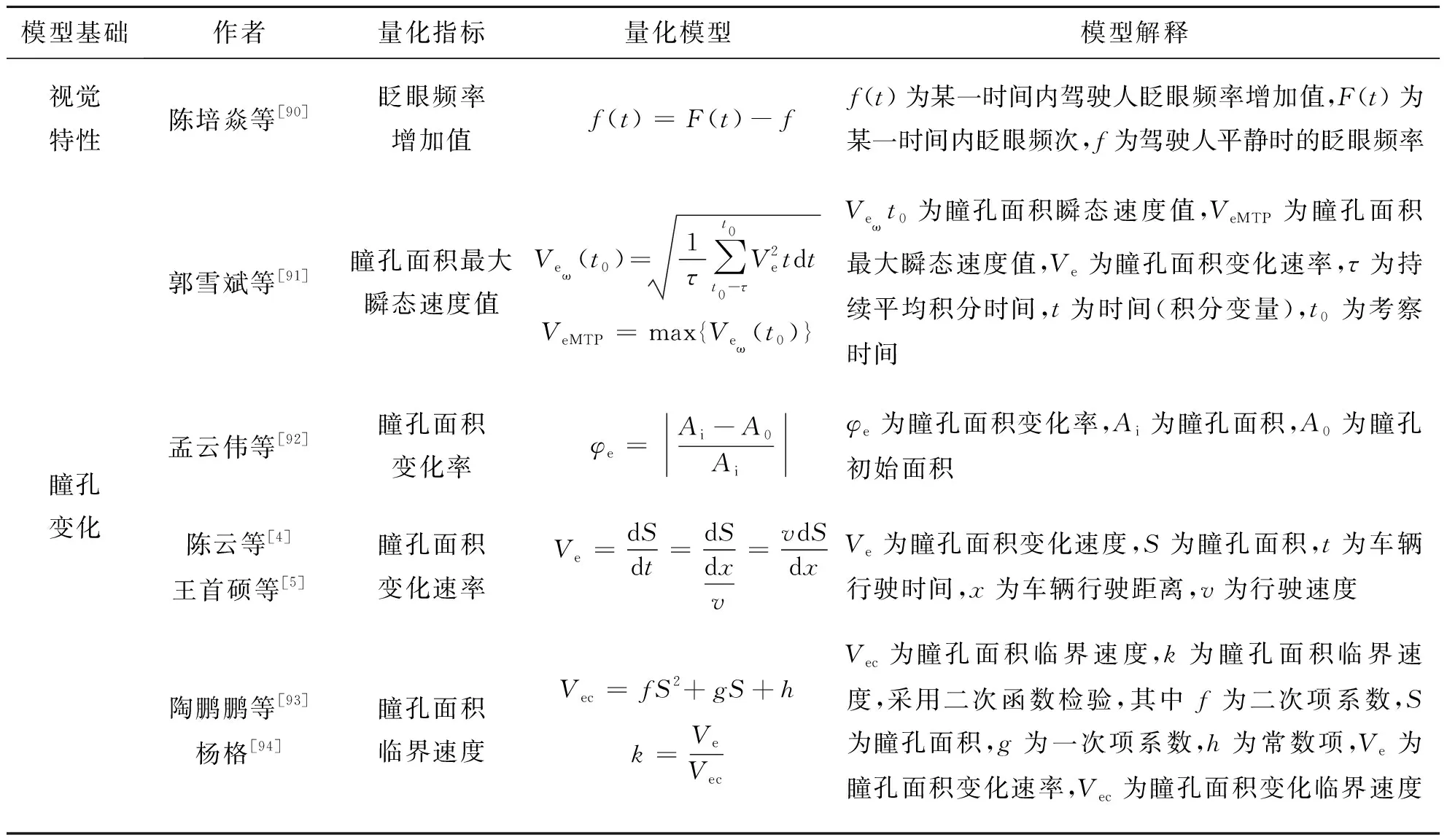
生理参数测量法能直观量化驾驶人的视觉负荷,一般采用统计学方法来研究视觉特性参数与视觉负荷之间的相关性,量化表征视觉负荷的眼动参数来评价驾驶人视觉负荷.从驾驶人视觉负荷产生机理角度看,目前视觉负荷的生理参数衡量指标可以分为2类:一是视觉特性参数,二是驾驶环境中光照强度引起的瞳孔生理性变化,计算方法如表4所示.

表4 生理参数量化方法Tab.4 Measurement methods of driver’s visual load
续表4
此外,除了以上3种常用的视觉负荷计算方法外,从驾驶人视觉信息刺激源出发,陈雨人等[23]最先提出了利用道路环境HSV颜色模型衡量驾驶人的视觉负荷.随后,孟云伟等[65]在此基础上改变了视觉分区方法,将驾驶人视野区域划分为路面、左右路侧和天空4个部分对道路环境HSV颜色模型进行改进.
3.2 机器学习评测方法
随着机器学习的技术发展,一些基于机器学习的算法在目标检测、状态判别等领域取得了突破性进展.在视觉负荷的研究方面,部分研究基于传统的图像处理方法进行特征提取后进行状态判别.首先捕获视频序列中监测跟踪的人脸区域,随后从面部提取眼睛区域,利用图像的统计特性分析并进行等级划分,最后在融合阶段判别驾驶人视觉负荷.现有研究中,较为常见的方法主要有结构相似度度量(Structural Similarity Measure,SSIM)、人类视觉系统(Human Visual System,HVS)模型[95]、动态贝叶斯(Dynamic Bayesian Network,DBN)[96]、主动形状模型(Active Shape Model,ASM)与基于马尔可夫网络的增强回归(Boosted Regression with Markov Networks,BRMN)[97]等.这些方法最大的区别在于图像的特性统计.SSIM和HVS主要分析方差、均值等,DBN主要通过检测驾驶人的瞳孔大小、注视和扫视的时变性转移概率来评价驾驶人视觉负荷,ASM和BRMN通过检测驾驶人眼球与鼻子构成的三角形区域面积来判定其视觉负荷.
4 驾驶人视觉负荷的研究应用
近年来,研究人员针对驾驶负荷进行了更为细化的研究,结合驾驶人的眼动特性分析,在视觉负荷领域形成了较为完善的理论体系,极大地发挥了视觉负荷在交通领域的应用.现有研究成果已经应用到了交通设施、车辆交互设备的设计指导中.
4.1 交通标志
在道路交通环境中,除了交通参与者外,交通标志作为道路信息传递的重要载体,可以引导驾驶人的驾驶行为从而减少交通事故的发生[98].目前我国对交通标志的设置没有较为完善的标准,其设置存在信息量不足或过载的情况[99].交通标志信息量不足,一方面会影响道路信息传递的有效性,另一方面还会导致驾驶人信息刺激强度小而引发驾驶分心[100].因此,在道路交通环境较为简单的草原公路中,为了吸引驾驶人的注意力,保证驾驶过程中的视觉刺激,交通标志的信息量一般都设置为10~20 bits/km[101],以此来保证驾驶人视觉搜索的积极性与有效性.相比于草原公路,高速公路的匝道口较多,需要标识的信息更为繁杂,交通标志的设计过程中容易出现信息过载的情况.为了增加交通标志的视认性,简化驾驶人视觉信息处理加工过程,高速公路指路标志上的地名信息数量应小于5个[102],隧道出入口的停车视线距离应在现行标准规定的基础上增加20~30 m[103].
4.2 隧道遮光设施
隧道出入口亮度的急剧变化会导致驾驶人瞳孔快速增大,甚至会出现无意视盲现象[104],由此可能会导致交通事故.现有研究中,为减小隧道出入口处的明暗对比,多在隧道出入口处安装遮光设施.遮光设施的最佳铺设范围为隧道外 40 m 至隧道内 60 m[91].常见的隧道遮光设施中,30°反削竹遮光设施的遮光效果最佳,光照强度的变化较为缓和[93].若使用格栅式减光设施,应保证其频闪频率小于 6 Hz 或大于 11 Hz,以减小对驾驶人的视觉干扰[90].同时还可以利用植物、加强照明及彩色路面等改善隧道进出口处驾驶人的视觉舒适度[105].其次,隧道内的壁面多采用浅色墙面[106],隧道内部增设韵律型标线[107]、突起路标[108]等刺激驾驶人的视觉感知,吸引驾驶人注意道路环境,从而降低驾驶人视觉负荷,减小交通事故的发生概率.
4.3 车内交互设备
随着车内交互设备的技术发展,在给驾驶人带来便利的同时也引发了一些不必要的驾驶负荷,其中就包括视觉负荷.车内交互设备在发挥其引导、预警功能时会分散驾驶人的视觉注意力[109].因此,很多交互设备在设计初期考虑了其对驾驶人视觉负荷的影响,增加了信息传递方式,如语音提示、触觉传递[110]等方式.这些设计不仅实现了其驾驶辅助功能,还在一定程度上减少了驾驶人视觉负荷,提高了车道保持性能,减小了驾驶人反应时间[85].其中,Broström等[111]对比了语音提示与地图导航对驾驶任务的影响,发现开启了语音提示的导航在行车过程中能减少交通冲突次数,并建议车内交互设备在设计初期时增加语音提示以减小驾驶人视觉负荷;Pitts等[110]研究发现增加触觉反馈系统后,驾驶人的车道保持能力得到了有效提升,并建议在交互系统设计初期要增加其他信息传递方式,以保证驾驶人的视觉负荷处于合适的阈值内.
5 总结与展望
5.1 总结
国内外研究人员已经对驾驶人视觉负荷进行了大量的研究并取得了较为丰富的成果,目前已经形成了较为完整的研究体系.但是还存在以下几点不足:
1)较少有研究对驾驶人视觉负荷的影响因素进行重要度探究.目前国内外对驾驶人视觉负荷的影响因素进行了大量的研究,如驾驶人自身因素、车辆因素、道路环境因素等.驾驶人视觉负荷是多因素共同作用产生的,现有文献中,仅对驾驶人视觉负荷的影响因素及其影响机理进行了研究,较少对各影响因素的重要度进行研究.
2)缺乏对视觉负荷的评价指标与衡量阈值的统一.在现有研究方法中,只有生理参数测量法能够客观量化驾驶人的视觉负荷,但是在判断驾驶人视觉负荷时,研究者们往往给某一参数设定一个阈值,当超过这一阈值时,就判断驾驶人的视觉负荷过大.此外,由于驾驶人主观感受差异较大且驾驶场景不同,各研究选取的衡量参数及阈值也不同,因此,驾驶人视觉负荷的衡量指标缺乏统一的标准,大大增加了驾驶人视觉负荷评价的工作量.
3)缺少视觉负荷应用后的评价.现阶段,视觉负荷在交通标志方面的应用主要是考虑驾驶人信息处理能力从而改善交通标志的视认性,对交通标志的信息量设置提出了建议;在遮光设施方面的应用主要是考虑驾驶人的明暗适应能力,以提高隧道行车安全.当前研究仅从驾驶人信息处理能力、视觉舒适度出发,提出了交通设施的设计建议,未对改进后的交通设施的应用效果进行评价.
5.2 展望
考虑到已有研究的不足,从驾驶人的视觉负荷影响因素、评价指标以及研究应用3个方面对未来的研究进行展望:
1)驾驶人视觉负荷的影响因素是多方面且复杂的,驾驶经验、年龄、人格特性、车辆和道路环境等都不同程度地影响着驾驶人的视觉负荷.未来研究中,可以考虑部分极端驾驶场景(如恶劣天气、交通事故场景)和不同驾驶群体对驾驶人视觉负荷的影响因素及变化规律,对影响驾驶人视觉负荷的决定性因素进行更全面、深入的探究.
2)针对现有驾驶人视觉负荷评价指标存在的局限性,未来研究可基于生理参数测量法,增加车辆制动、生理心理参数等方面的评价指标,以期扩充当前仅使用驾驶人眼动参数的单一指标体系,并考虑构建驾驶人的最佳视觉负荷阈值标准体系.
3)视觉负荷应用在交通设施的改进中,可以考虑对比改进前后交通设施的作用效果.如可以通过驾驶模拟实验测试驾驶人对改进前后的交通标志信息视认的准确率、反应时间等来评价视觉负荷在交通设施中的应用成效.此外,视觉负荷的应用还可以从以下几个方面考虑:首先,在道路建设前期,可以考虑路域环境对驾驶人视觉负荷的影响,改善道路线形、路域空间的修建形式;其次,在提高交通人因安全方面,可以将视觉负荷应用到驾驶人视觉疲劳的检测当中,视觉负荷超过阈值一定的时间后,就可以认为驾驶人处于疲劳驾驶状态.此外,随着自动驾驶技术的发展,视觉负荷反应的视觉信息处理能力可以应用在交通环境识别等自动驾驶的关键技术中.
猜你喜欢
纺织标准与质量(2022年2期)2022-07-12
煤气与热力(2022年4期)2022-05-23
云南画报(2021年9期)2021-12-02
中老年保健(2021年12期)2021-08-24
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
长江大学学报(自科版)(2021年6期)2021-02-16
中国生殖健康(2020年6期)2020-02-01
中国外汇(2019年6期)2019-07-13
中国生殖健康(2019年11期)2019-01-07
智富时代(2018年5期)2018-07-18