
用于离子注入机的高压放大器的研制
2022-12-30 12:11金则军
电子工业专用设备 2022年5期
金则军
(北京烁科中科信电子装备有限公司长沙分公司,湖南 长沙 410000)
在整个半导体芯片制造中,至少需要几十道加工工序,涉及各种半导体设备。随着半导体产业不断深化,半导体设备行业愈加引起重视,通过对一系列重点工艺和技术进行攻关,有效促进了我国半导体设备行业的发展。目前虽然我国半导体专用设备企业销售规模不断增长,但半导体设备行业仍处于追赶阶段,整体国产化率处于较低水平,许多半导体专用设备仍主要依赖进口,离子注入机就是其中之一。
离子注入机是对半导体表面附近区域进行掺杂的技术,是制作集成电路必不可少的重要工序,离子注入机是半导体晶圆制造设备中的关键设备,高速高功率放大器(电源)是其组成之一,它的技术指标会直接影响整个设备的性能。
许多科研仪器和传感器都需要交流高压驱动(放大)器,它是一种高电压输出的信号发生器,是配合信号源的理想工具,通过相关设备连接,拓展信号源的输入电压幅度范围。如半导体高压驱动、压电材料驱动等方面。目前,市场现有的高压放大器输出峰值电压小于±10 kV。本文研制的高速高压功率放大器,在很大程度上提高了放大器输出峰值电压(40 kV)及额定输出功率(400 W);在高速、高压、高功率下满足带宽、压摆率等指标参数的要求。
1 高压放大器的设计思路
1.1 放大器的工作类型
根据有源器件的导通情况,通常将放大器分为A、B、C等几种类型[1]:
A类放大器:如图1所示,功率器件导通角为360°,始终处于导通状态,无论有无输入信号,均有电流流过器件。因此A类放大器的效率低,但它具有良好的线性,无交越失真问题。

图1 A类放大器导通角360°
B类放大器:如图2所示,两个功率器件在正、负半个周期轮流导通,导通角为180°,在无输入信号时没有电流流过功率器件。因此效率比A类放大器高,由于两个功率器件轮流导通,所以存在交越失真问题。

图2 B类放大器导通角180°
AB类放大器:如图3所示,AB类放大器介于A类和B类之间,功率器件导通角180°~360°,因此效率高于A类放大器,失真低于B类放大器。

图3 AB类放大器导通角(180~360°)
小信号时2个晶体管同时开,类似于A类放大器;大信号时,每半个周只有一个晶体管工作,类似于B类放大器。
C类放大器:如图4所示,功率器件的导通角小于180°,因此效率较高,失真很大,通常用于射频放大器。

图4 C类放大器导通角小于180°
1.2 高压放大器工作方式的选择
兼顾失真和效率,高压放大器的工作模式选择为AB类,用推挽方式实现,如图5所示。

图5 高压放大器的静态工作点,工作在A类,用推挽方式实现
上、下管Q1、Q2完全相同。当输入信号为0时,激励级产生两个大小相同的基极电流IbQ_Q1和IbQ_Q2,所以上下管Q1、Q2流过相同的静态电流IQ,由于上、下管产生的压降相同,所以输出电压Vout=0 V。
当有信号输入时如图6所示。

图6 当有信号输入时高压放大器的工作
激励级将输入电压变换成两个具有直流分量IbQ_Q1和IbQ_Q2的差分电流信号。当输入信号正半周时Q1的输出电流会上升,而Q2的输出电流会逐渐下降为0,这使得Q1上的压降降低,而Q2上的压降上升,最终负载上的输出电压V输出上升。反之在输入信号负半周时,负载上的输出电压V输出下降。
2 高压放大器的单元构成
高压放大器的单元组成如图7所示。

图7 高压放大器的单元组成
高压放大器的输出经电压取样后与输入信号进行比较,产生的误差信号经误差放大器放大后由激励级驱动放大器输出,实现闭环负反馈控制,使得输出电压能够跟随输入信号,达到稳定输出电压的目的。
放大器设置有输出电流限流控制、输出电流过流触发保护、短路保护及放大器稳定性保护等,并设有输出电流检测、输出电压检测和放大器稳定性检测报警等检测信号。
3 高压放大器的实现
3.1 高压器件的实现
由于需要输出±20 kV的高压,推挽放大器的上、下两个功率管是实现高压放大器的关键。为了提高耐压,功率放大电路以双极型晶体管为主体,由MOSFET和IGBT组成的串联电路来实现,如图8所示。

图8 高压放大器的单元组成
均压是器件串联使用时无法回避的问题,如图8所示由N个单元组成的上管,供电电压为Vcc、输出电压为Vout,则每个单元承受的电压为:

当输出电压变化时,每个单元承受的电压同步变化,每个单元的电压VCELL仍然相同,实现了均压。
3.2 静态工作点
高压放大器的最大输出电流为±20 mA,兼顾失真和效率,将功率器件的静态工作点设置在8 mA处(激励级电路的设计保证放大器的输入电流Ib不会出现负值),如图9所示。

图9 高压放大器的静态工作点
当输入电压为0时,放大器的静态工作电流为8 mA,上下管电流相同,输出电压为0。当输入电压为正时上管导通电流上升,下管导通电流下降,使得输出电压为正。反之,输入电压为负时,输出电压为负。
3.3 环路稳定性
未补偿时的环路增益Tu(s)可近似为:

其中:
Tu0≈1.91
ωp1≈5.65×104(rad/s)
ωp2≈3.9×106(rad/s)
Q≈1.15
未补偿环路增益的伯德图如图10所示,环路低频增益约5.6 dB,环路穿越频率约15 kHz。

图10 未补偿环路增益的伯德图
为了提高环路带宽,并提高放大器的低频抗干扰能力,补偿器采用滞后超前网络[2],设置环路带宽为300 kHz、相位裕度60°。补偿网络的传递函数Gc(s)为:

其中:
Gc0≈2.4×106
ωz≈6.21×105(rad/s)
Q2≈0.26
ωp3≈7.32×106(rad/s)
Q3≈0.35
补偿网络的伯德图如图11所示。

图11 补偿网络的伯德图
补偿后的环路增益T(s)约为:

其中:
T0=Tu0Gc0≈4.584×106
ωz≈6.21×105(rad/s)
Q2≈0.26
ωp1≈5.65×104(rad/s)
ωp2≈3.9×106(rad/s)
Q≈1.15
ωp3≈7.32×106(rad/s)
Q3≈0.35
补偿后的环路增益的伯德图如图12所示,其穿越频率约为300 kHz,相位裕度约为60°。为了适用不同的负载特性,环路补偿网络的增益设置为在一定范围内可调,并将调节电位器设置在前面板上。

图12 补偿后环路增益的伯德图
4 放大器的结构设计
高压放大器由供电电源、放大器、控制板等单元组成。由于放大器的整机功耗较大,散热是整机结构设计的重点。机箱采用了风冷,在后面板上安装两个风扇,在机箱的两侧靠近前面板各设置一个通风口,便于气流通过放大器的功率单元和高压供电电源,如图13所示。
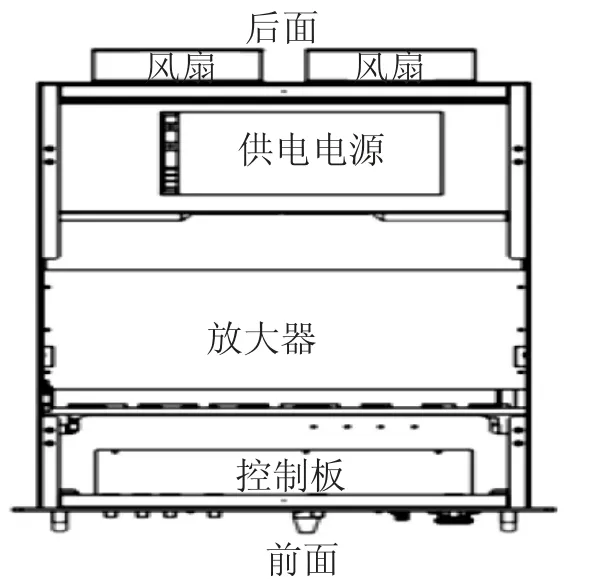
图13 高压放大器的结构示意图
5 测试结果
输出电压范围:±20kV(额定负载1 MΩ)
压摆率:800 V/μs
大信号带宽(1%失真):5 kHz
小信号带宽:20 kHz
6 结束语
本文介绍了±20 kV/400 W高压放大器的研制,描述了高压放大器的单元组成、功率器件的结构组成、放大器的动力学特性,以及放大器的环路补偿及其环路稳定性。通过样机的实验测试结果,指标达到了设计要求。
猜你喜欢
河北工业大学学报(2021年4期)2021-09-23
河北电力技术(2021年2期)2021-07-29
北京航空航天大学学报(2021年6期)2021-07-20
科技创新与应用(2021年10期)2021-03-15
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
现代防御技术(2017年2期)2017-05-13
电子制作(2016年1期)2016-11-07
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
全球定位系统(2015年4期)2015-02-28
