基于STM32的高度可控空气悬架教学试验平台研究
2022-12-30 07:41:54王涛,马晨
教育教学论坛 2022年44期
王 涛,马 晨
(昆明铁道职业技术学院 机电工程学院,云南 昆明 650200)
引言
电子控制技术经过了微处理器技术及超大规模集成电路技术的发展,已形成以STM32单片机为特色的微型计算机系统,具有功能强大、低电压低功耗、运行速度快等特点,在现代社会广泛应用于计算机领域、工业控制领域、智能化仪器仪表领域、信息和通信领域、汽车工业领域等。以汽车工业领域为例,随着汽车智能化和网联化程度的推进,汽车电控系统变得日益复杂,电子控制技术已经成为汽车性能提升的核心使能技术[1-2]。“单片机自动控制”课程是高职汽车检测与维修技术专业很重要的专业课程,是一门实践性和综合性都很强的课程。目前,各高职院校对“单片机自动控制”课程的授课比较保守,受制于总课时的不断压缩,在授课方式上,采取的还是理论课加试验课的教学组织形式,这种组织形式在一定程度上割裂了工程技术类课程的实践性;在授课内容上,以单片机各模块单一功能的实现为教学目标,脱离了工程实践意义,与汽车电控自动化关联度不大,容易使学生陷入“学过但不会用”的窘境[3-4]。笔者采用以实践为主、由浅入深的进阶式教学方法,把单片机自动控制试验分解为基础试验、进阶试验和综合试验[5]。本文主要讨论综合试验的问题,以开发面向教学的高度可控空气悬架试验平台为例,用单片机为控制器,把GPIO、ADC采集、继电器驱动等基础单片机实验集成在一起,实现对空气悬架高度的自动控制,让学生综合运用单片机所学解决实际的汽车工程问题。
试验平台的开发还有如下优势:(1)开发具有汽车工程实践意义的电控自动化项目实训台,有利于培养既懂机械维修,又懂电控的复合型技术人才;(2)可以直观看到电控程序呈现在汽车部件上的运行结果,让学生获得直观、生动的感性认知,提升学生的学习热情和教学效果;(3)把单片机自动控制分散的实训功能有机集合在一起,有利于培养学生的灵活性和创新性,让学生在学习过程中接触并建立电控自动化系统的概念,为培养合格的汽车类专业技术人才打下坚实基础。
一、高度可控空气悬架试验平台开发
(一)ECAS系统简介
电子控制空气悬架(ECAS)系统由国外发展而来,整个系统由气源、控制系统、执行机构组成。气源是电动打气泵,电动打气泵对整车的空气弹簧和储气罐进行供气;控制系统由控制器和各类传感器组成,接收各传感器送来的信号和采集CAN线里面有用的信息;执行机构主要是各电磁阀和空气弹簧,通过控制各电磁阀的开和关来控制空气弹簧的充气和放气。
空气弹簧内充入一定量的高压空气,以此为传递介质,本身就具有刚度和高度可调的特性。ECAS系统由控制器进行计算处理,发出控制指令,对车身高度进行控制。在高速行驶时,空气弹簧排气,车身高度降低,以保证车辆的操控稳定性,减小风阻;当汽车在非铺装路面行驶时,空气弹簧充气,车身高度升高,以保证良好的通过性,防止底盘被刮擦。ECAS系统因其优良的性能,已经被广泛应用于客车和轿车,现在在我国逐渐从高端车型向中低端车型普及[6]。
按以上使用角度分析,常规电控空气悬架集成了以下功能:(1)手动控制功能:能够用选择开关自主控制悬架高度,选择越野模式(OFF_ROAD)、普通模式(NORMAL)或高速模式(SPORT);(2)自动控制功能:在汽车的行驶过程中,车身高度能够随车速和路况自动调整[7]。
(二)总体方案设计
为了符合汽车工程实践定位,开发高度可控空气悬架试验平台必须达到以上手动控制和自动控制功能,在此基础上还可增设微调功能,在停车状态若簧上质量发生变化,导致车身高度变化,能够恢复原有车身高度;同时增设维修模式,在举升机举升车辆时让电动打气泵不工作,防止电动打气泵和蓄电池因异常工作而损坏。要达到以上功能,需要一个空气悬架实物的最小系统,本着结构简洁、功能清晰、易于理解的原则,设计了用最少部件构成的1/4 空气悬架实验平台,搭建方形框架,合理布置电动气泵、储气罐、分配阀、悬架空气弹簧、STM32 单片机等必要部件。试验平台采集储气罐空气压力和位移传感器信号传给控制器,同时控制器接收上位机发送的CAN通信信号,经过逻辑分析与计算,通过控制继电器输出分别控制空气压缩机、排气电磁阀、配气电磁阀的工作状态,以达到控制空气悬架高度的目的。最终空气悬架试验平台拟达到以下功能:(1)手动控制悬架高度;(2)悬架高度随车速自动调节;(3)悬架高度自动恢复功能;(4)维修时系统静默。
(三)高度可控空气悬架试验平台软硬件设计
高度可控空气悬架试验平台硬件设计按功能主要分为五个部分:控制器、ADC模块、CAN通信模块、继电器驱动模块、人机交互模块。
1.控制器模块。控制器采用成熟的STM32F103,最高工作频率72MHz,外设接口丰富,具有较强的拓展性,可满足系统对串口数量的要求,设置IO端口管脚分配如下(见表1)。
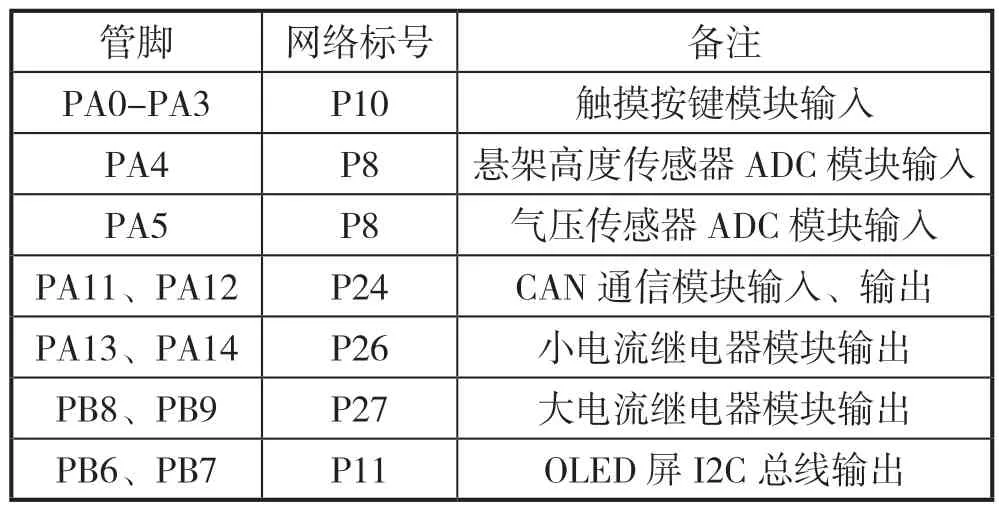
表1 控制器管脚分配
2.ADC模块。由控制器供给5V电压,用宏定义设置ADC连接的IO端口为PA4、PA5,负责采集悬架高度传感器数据和分配阀气压数据,并把数据采集的模拟量转换为0~5V的电压信号,通过串口PA4、PA5输出到控制器。两个ADC也通过DMA通道进行自动数据采集,把数据存入SRAM,控制器需要时直接从SRAM中提取。
3.CAN通信模块。设置CAN信号接收和发射的端口为PA11、PA12,接收上位机发来的CAN总线信号,通过TJA1050芯片进行转换,解析出车速信号,通过串口PA11输出到控制器。
4.继电器驱动模块。用宏定义设置继电器连接的IO端口为PA13、PA14、PB8、PB9,由控制器供给5V电压,采用低电平控制方式,当控制器给驱动电路IN5脚输出低电平时,通过驱动电路给继电器J1输出高电平,触发继电器内部开关导通,从而控制外部功能电路导通。
5.人机交互模块。人机交互界面由触摸按键和OLCD显示屏组成,触摸按键可选择OFF_ROAD、NORMAL、SPORT、AUTO四种模式,OLCD显示屏把控制器收到的模式信号、CAN信号、ADC信号等关键信息直接显示出来,便于读取。
高度可控空气悬架试验平台软件设计主要是控制器程序设计(如图1),系统通电以后进入初始化,把系统时钟、继电器、ADC、CAN等系统初始化,进入数据处理主循环。在手动模式读取触摸按键信息,判定当前模式并读取悬架高度信息,判定悬架需要上升、下降还是保持,进入相应的工作模式,驱动继电器进行工作,当悬架高度达到标定值,系统停止工作进入主循环;在自动模式读取CAN线发送来的车速信息,读取悬架高度信息,判定悬架需要上升、下降还是保持,进入相应的工作模式,驱动继电器进行工作,当悬架高度达到标定值,系统停止工作进入主循环。
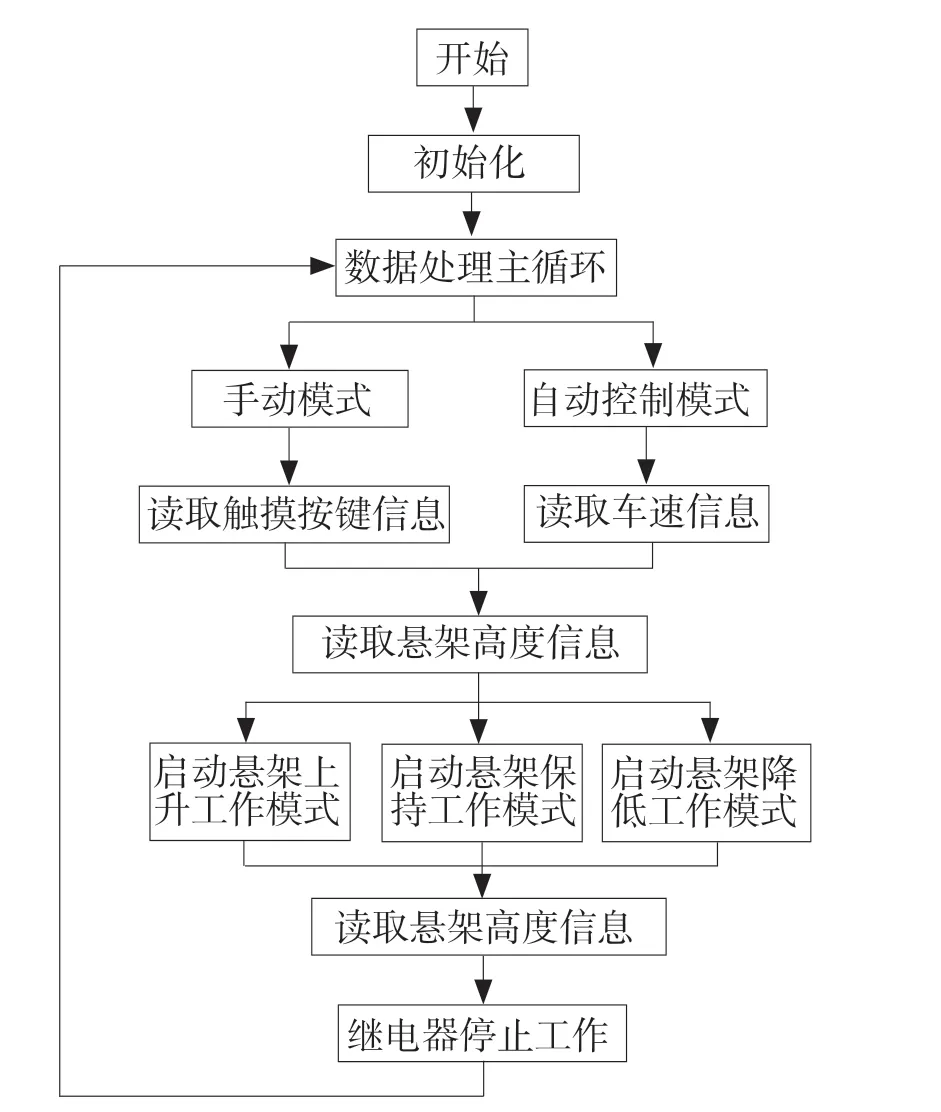
图1 主程序流程图
(四)试验平台系统集成与验证
搭建高度可控空气悬架试验平台实物如图2所示,空气悬架试验平台与控制器连接后按流程进行调试。(1)进行外部设备OLED显示的调试,在显示屏上显示模式、车速、悬架高度、气压等标题信息;(2)调试电动打气泵继电器、排气阀继电器、储气罐进气阀继电器、空气悬架进气阀继电器的驱动,依据动作真值表进行四个继电器的协同控制调试,实现继电器按悬架升高或降低的动作要求进行控制;(3)标定悬架高度传感器和储气罐气压传感器,进行悬架高度和储气罐气压的ADC采集调试,采集数据后进行模/数转换,并且在显示屏上显示转换成电压的信息,同时按高度电压值实现对以上四个继电器的协同控制;(4)进行CAN通信的调试,能够接收上位机发送的CAN信号,并解析出车速信号,显示在显示屏上,同时按车速信号实现对以上四个继电器的协同控制。最终完成整个系统功能的集成,实现高度可控空气悬架试验平台设计的功能。系统初始化后悬架系统进入普通模式,手动分别选择OFF_ROAD、NORMAL、SPORT模式,空气悬架能调整到对应高度,实现手动功能;选择AUTO功能,从上位机导入车速数据,悬架高度随车速变化而自动调节(如表2、图3所示),停车情况下实现空气悬架随簧上质量的变化自动微调,维修举升情况下实现了系统静默,达到了空气悬架在实车应用上的基本要求。
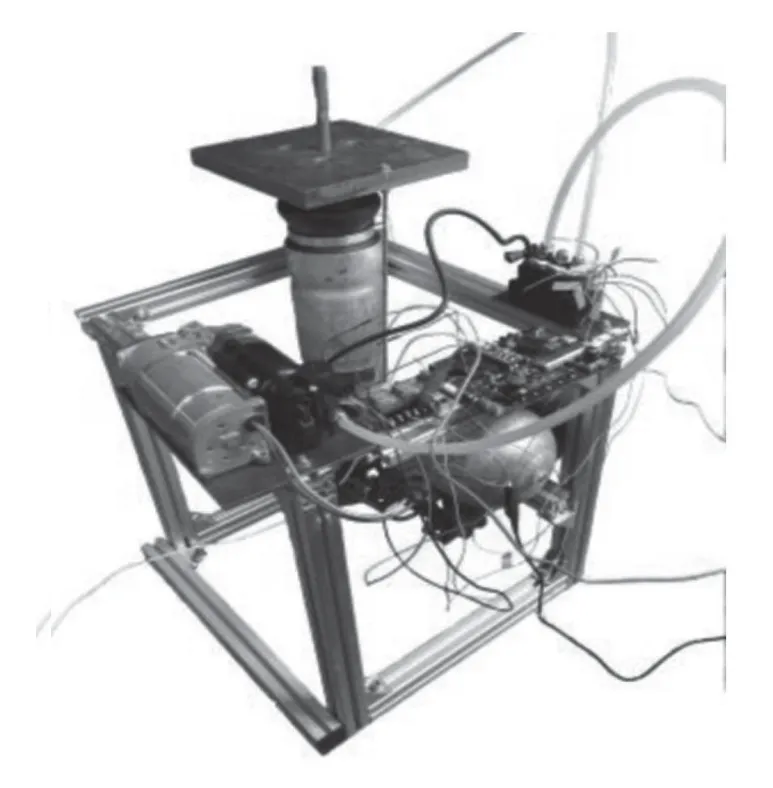
图2 高度可控空气悬架试验平台
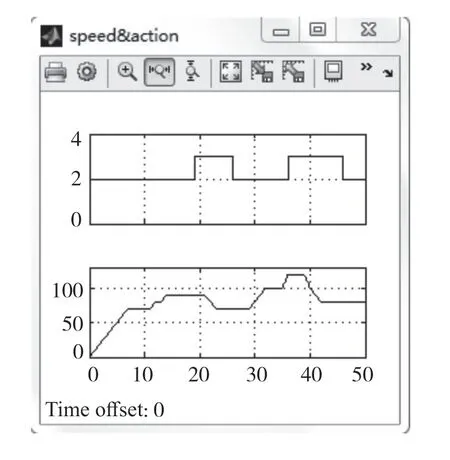
图3 悬架高度随速控制
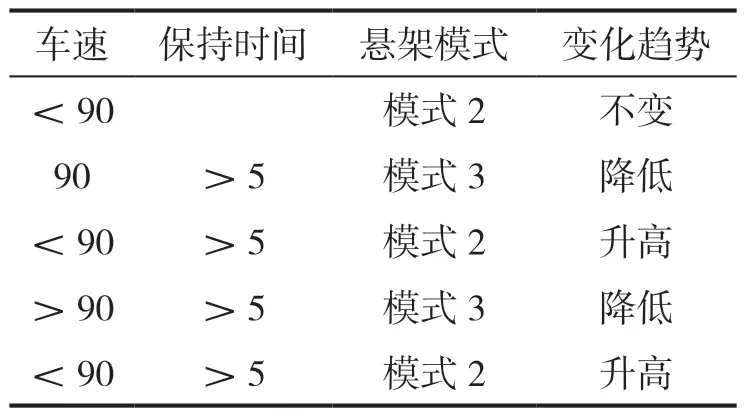
表2 空气悬架高度自动控制车速模拟表
二、教学应用与推广
高度可控空气悬架试验平台系统程序在Keil uVision4开发环境下编写,配置好底层程序后只需对main.c文件进行编译即可,有一定单片机基础的学生上手难度不大,可训练学生Keil uVision4软件的使用、FlyMcu等第三方ISP在线编译软件的使用。本试验平台整合了单片机试验中的GPIO输出试验、外部中断试验、ADC采集试验、CAN通信试验、继电器控制试验、触摸按键驱动试验、OLED屏显示试验等(见表3),既可以把以上试验单个开展教学,也可以指导学生综合调用以上部分或全部程序来解决实际汽车工程实践问题——汽车悬架高度的自动控制问题。
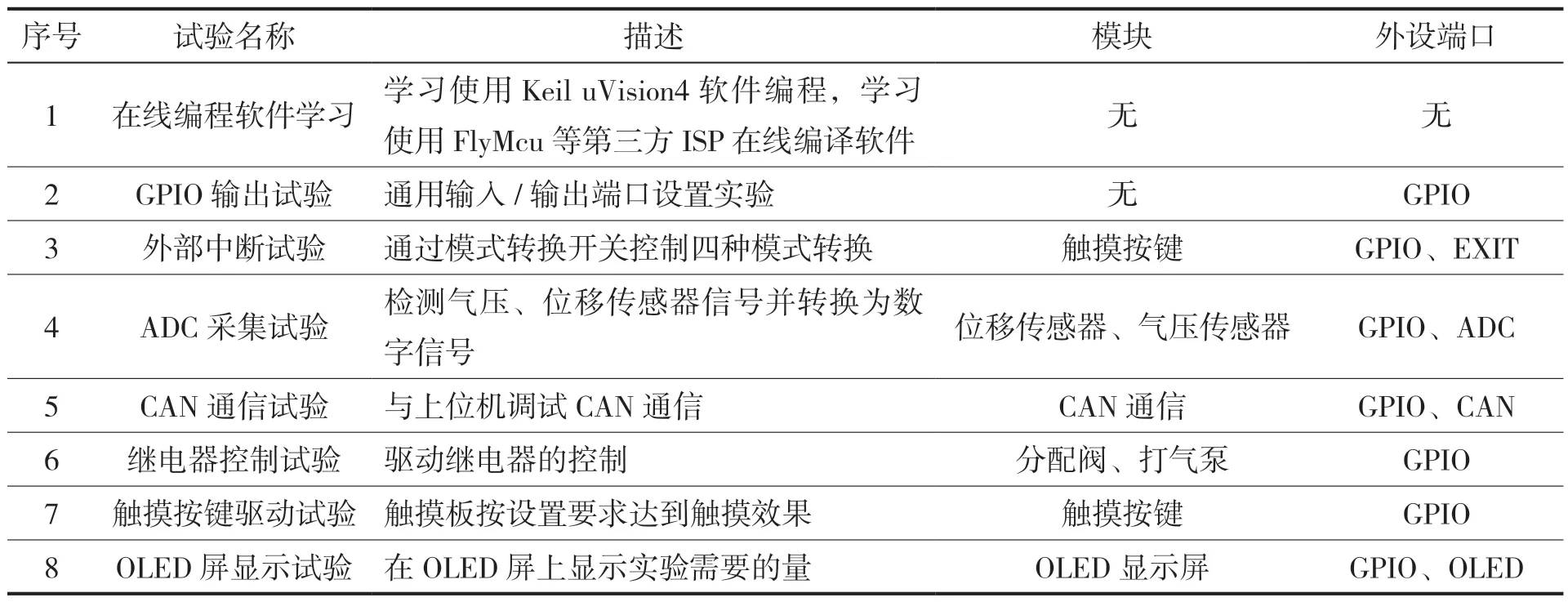
表3 高度可控空气悬架试验平台试验项目表
以综合实训项目为例,用项目教学法实施汽车悬架高度自动控制实训项目:(1)明确项目任务。组建6~8人学习小组,完成准备工作,明确空气悬架高度自动控制的任务目标,把任务分解为ADC采集、继电器控制、触摸按键驱动等不同的子项目,每人负责1~2个子项目。(2)制订计划。小组讨论制订项目实施计划,包括任务分工、实施步骤、时间节点、阶段性成果等。(3)项目实施。子项目任务解析,小组成员利用网络、微信、书面资料等方式查阅相关子项目信息,发挥主观能动性,用单片机开发板实现各子项目功能,训练学生灵活应用资源以达到目标的自学能力。(4)成果检验。把各子项目的成果汇总在一起,完成空气悬架高度自动控制的集成调试,最后教师点评团队项目实施过程及成果,大家共同学习,形成合力共同进步[8]。
结语
本文围绕单片机自动控制的高职教学,以工程应用为背景,设计了面向教学的高度可控空气悬架试验平台,使高职单片机的教学与工程实践挂钩,有助于开发“教—学—做”一体化的教学过程,实现了知识运用的综合性、实践性和创新性。以项目教学法推动本项目实施,有利于培养学生的灵活性和创新性,并且让学生在学习过程中接触并建立电控自动化系统的概念,让学生学以致用,取得较大的成就感。同时,高度可控空气悬架试验平台建立的是1/4实物悬架,具有较强的拓展性,还可应用于嵌入式课程的教学,在MATLAB软件里用Stateflow功能搭建整车悬架控制策略,利用AUTOBOX建立整车空气悬架模型,联合此1/4实物悬架实现半实物仿真,验证控制策略的正确性。
猜你喜欢
装备制造技术(2021年4期)2021-08-05 07:39:12
铁道通信信号(2020年8期)2020-02-06 09:13:22
电子测试(2018年22期)2018-12-19 05:12:42
电子测试(2018年6期)2018-05-09 07:31:47
北京汽车(2016年6期)2016-10-13 17:07:50
铁道通信信号(2016年12期)2016-06-01 12:11:58
海峡科技与产业(2016年3期)2016-05-17 04:32:11
电子制作(2016年23期)2016-05-17 03:53:43
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
自动化博览(2014年10期)2014-02-28 22:33:42