
移置式带式输送机关键技术研究
2022-12-29 07:42丁鹏飞
机械制造 2022年10期
□ 丁鹏飞
中煤科工集团上海有限公司 上海 200030
1 研究背景
移置式带式输送机是露天矿连续开采、半连续排岩、可根据作业需要横向移设的移置式连续输送机械,常与斗轮挖掘机配合应用于开采面或与排土机配合应用于排土场,也可应用于输煤系统中。与通用带式输送机相比,露天矿使用的移置式带式输送机具有大带宽、大运量、高带速、长运距的优点。随着露天矿采掘工程的不断推进,露天矿的开采深度持续增大,我国主要露天煤矿平均开采深度已达182 m,最大深度超400 m。随着开采深度的不断增大,深部煤炭运输问题日益显现。因此,对于移置式带式输送机半连续开采新工艺,尤其是由履带底座式来实现移动的移置式带式输送机,实现履带车的同步可移置是至关重要且亟需研究的问题。
2 中间桁架结构分析
为了适应露天矿采煤工作面的实时变化,履带底座式的横向自移带式输送机开始得到应用。笔者研究的移置式带式输送机如图1所示。机身中间桁架与机头架、机尾架采用铰接结构连接,机头架、机尾架与履带车M完全固定,中间桁架与履带车N有X、Y、Zr三个自由度,用以释放履带车运行不同步而导致的机头架、中间桁架及机尾架之间的相互作用力。
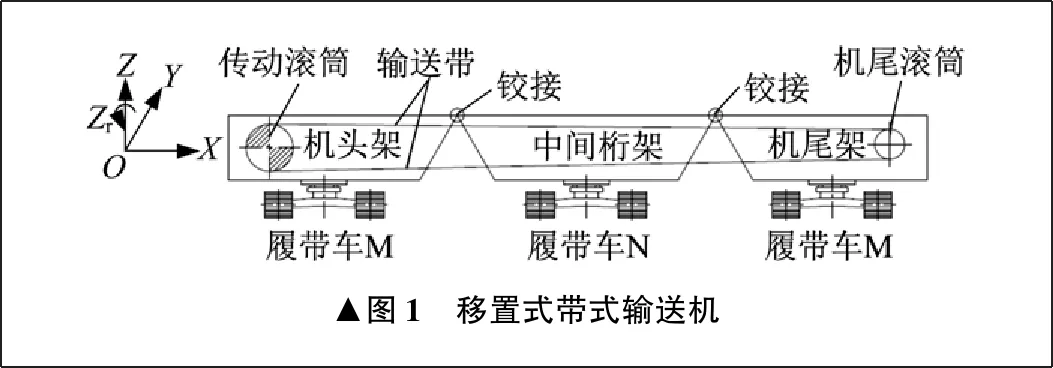
▲图1 移置式带式输送机
为了确保中间桁架与履带车N的连接稳定性,两者在三个自由度上并非无限制开放,而只能在一定范围内相对运动。因此,当履带车N与中间桁架在三个自由度上出现较大偏移时,通过惯性测量单元导航系统,控制履带车N的运动,使其与中间桁架在三个自由度上的偏差重新归零至关重要。履带车的同步跟随简化控制如图2所示。
图2中,C0为履带车N与中间桁架的连接点,C为履带车N的中心点,B为履带车N上两条履带的间距。以C0作为参照点,C在X、Y、Zr三个自由度上的偏移量依次为位移偏差L、W及偏航角θ。L和W由履带车上的位移传感器获取,θ由偏角传感器获取。同步跟随控制就是在两台履带车M以速度v运行时,调节履带车N两条履带的速度v1和v2,使L、W及θ趋于零,也就是说履带车N在跟随履带车M的同时,还要消除三个自由度上的偏移,最终令履带车N与履带车M的运动状态完全相同。获得的位移偏差与通过有限元分析得到的能保持稳定的最大偏差量相比,大于最大偏差量的80%时,控制履带车调偏。消除三个自由度上的偏移,最终令履带车的运动状态完全相同。

▲图2 履带车同步跟随简化控制
3 惯性测量单元导航系统
在履带车的底座加装由高精度加速度计、陀螺仪及磁力仪组成的惯性测量单元导航系统,以实时获得履带车运动时的运动姿态角,即偏航角。当履带车移动时,惯性测量单元导航系统计算机可以准确获得三维角速度信息和加速度信息,然后将这些测得的数据信息发送至履带车。对姿态矩阵进行求解,在通过姿态矩阵计算导航参数时,将惯性测量单元导航系统中的加速度计测得的三维加速度数据转化为参考坐标系,然后执行导航解决方案,得到履带车惯性测量单元导航系统的位置姿态方程和系统的误差方程。
履带车头部安装激光雷达,履带车边走边同步定位与建图。履带车机载计算机中还安装有机器人操作系统,系统中的Gmapping包和Navigation包,是履带车导航定位的决策层。Gmapping包能获取扫描的激光雷达信息、里程计数据和惯性测量单元导航系统的位置姿态数据,动态生成二维栅格地图。Navigation包是一个二维平台的导航包,能够获取里程计数据、传感器数据、惯性测量单元导航系统的位置姿态数据。利用Gmapping包生成地图,根据里程计数据和激光雷达数据,制订出适合的路径规划和定位。
相邻的两台履带车通过激光定位的方法,完成履带车在移动过程中相邻履带车的相互对位。在一台履带车放置两个激光发射器,另一台放置两个互相垂直的激光定位板,一个水平放置、一个竖直放置。两个激光发射器分别发射激光至水平、竖直激光板。水平方向的激光板负责检测履带车在水平移动时两台履带车的位置偏差,当位置发生偏差时,将数据发送至两个系统,对履带车的速度进行控制。竖直方向的激光板负责检测当履带车路过不平路面时两台履带车在竖直高度上的位置变化。当偏移量过大,大于80%时,履带车立即停车,规划新的行走路线,确保两台履带车的相对位置不发生改变。
通过在履带车的底部安装惯性测量单元导航系统,结合同步定位与建图,实现对履带车位置速度的监控,同时通过激光雷达,完成履带车行走过程中的路径规划及实时导航,相邻的两台履带车通过激光定位确定相对位置。
4 结束语
针对移置式带式输送机的关键技术进行研究。对与履带车连接的大跨度中间机架的结构进行分析,得到中间机架与履带车能保持稳定的最大位移偏差。同时对履带车的惯性测量单元导航系统进行研究。笔者的研究成果进一步完善了大型露天矿移置式带式输送机的设计理念,提高了移置式带式输送机的设计水平,对提高产品自主设计质量、增强产品的市场竞争力具有重要意义。
猜你喜欢
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年6期)2021-06-09
兵器装备工程学报(2021年3期)2021-04-09
家庭影院技术(2020年11期)2020-12-28
防爆电机(2020年5期)2020-12-14
建材发展导向(2019年5期)2019-09-09
建材发展导向(2019年11期)2019-08-24
电子制作(2017年17期)2017-12-18
山东工业技术(2016年15期)2016-12-01
科技视界(2014年6期)2014-12-24
