基于某发射装置的电子受信仪设计
2022-12-28 05:53李玉军程林风谭华峰
机电工程技术 2022年11期
李玉军,程林风,谭华峰,刘 杰
(中国船舶集团有限公司第七一〇研究所,湖北宜昌 443003)
0 引言
发射装置是通用发射平台,可用于车载及舰载发射系统。该装备配有控制设备,具有旋回、俯仰等功能,能随时根据指令要求完成伺服调转及发射功能。受信仪作为发射装置的传感设备,具有反馈装置运行角度位置和控制装置运行、射界范围的功能[1-2]。随着现代发射装置的伺服精度及智能发射要求提高,设计一款高精度的集数据采集校验及智能控制等多功能于一体的电子受信仪就有了迫切需求。
国内旧式发射装置受信仪大多采用了传统的单旋转变压器或光电编码器采集角度,无法验证角度数据的正确性及可靠性,旋转变压器或光电编码器一旦发生故障,易导致发射装置超运行范围及射界范围而引起事故;旧式受信仪的运行、射界采用机械开关,安装精度受限,占用空间大,出、入运行、射界的角度误差较大;运行、射界范围的调整过程极其繁琐[3],长时间使用后机械开关易损坏。因此,开发一款高可靠性、智能化、节省空间的电子受信仪对提高发射装置伺服调转及发射控制可靠性尤为重要。
为了实现上述目标,本文以微控制器LPC2294为核心,通过采集双机电编码器数据进行校验实现了采集角度数据的正确性及可靠性验证,通过采集发射装置的高低、方向角度数据与预设运行、射界范围进行比较实现对运行、射界智能控制,通过上级控制计算机对电子受信仪发送指令实现对发射装置的运行、射界范围进行设定。本文通过以上方法提高发射装置角度采集数据的可靠性,提高发射装置运行、射界范围的控制精度,实现对发射装置运行、射界智能化设定功能,对提高现代发射装置的伺服调转精度及智能发射等都有重大意义。
1 系统组成及工作原理
1.1 系统组成
电子受信仪组成如图1所示,由智能角度采集板、方向主机电编码器[4]、方向从机电编码器、高低主机电编码器、高低从机电编码器等5部分组成。机电编码器选用单圈绝对值16位旋转机电编码器,分别采集高低及方向的角度信息。智能角度采集板通过双冗余CAN总线接收高低及方向的角度信息进行处理,通过另一对双冗余CAN总线与上一级控制计算机通信。
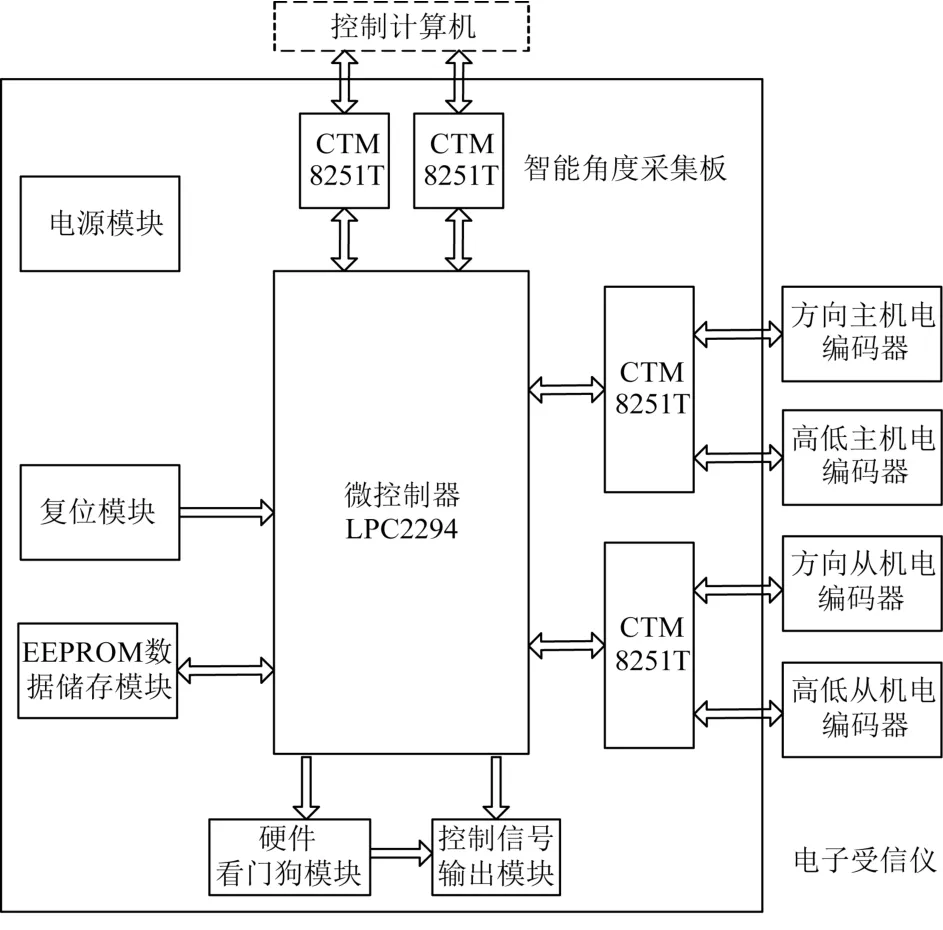
图1 电子受信仪组成
智能角度采集板包含微控制器LPC2294、电源模块、复位模块、EEPROM数据储存模块、硬件看门狗、控制信号输出模块及CAN通信模块。
1.2 工作原理
电子受信仪在加电工作情况下,通过方向主机电编码器、高低主机电编码器实时采集发射装置的回转和俯仰角度。智能角度采集板对采集的主机电编码器的角度值每隔5 ms进行转发,同时每隔50 ms分别比较方向主机电编码器与从机电编码器、高低主机电编码器与从机电编码器角度值,如果主、从编码器比较超出误差范围(0.5°)则断开运行、射界并输出报警信号。智能角度采集板对采集的主机电编码器的角度值与设定的运行、射界范围角度值进行比较,通过控制相应的继电器输出射界信号和运行信号,从而实现对运行、射界的控制[5]。
采用软件配置射界、运行范围角度值。当系统需要修改射界、运行范围时,采用软件配置射界、运行范围角度值。在电子受信仪智能角度采集板上设有一片EEPROM,微控制器LPC2294通过I2C总线与之通信,将射界、运行角度值的配置数据存入EEPROM。需要修改射界、运行数据时,控制计算机通过给智能角度采集板发送数据对之进行修改[6]。
当需要对机械与电气零位校准时,将发射装置调转到机械零位时,通过智能角度采集板输出控制指令,对主、从机电编码器进行电气置零。
2 电子受信仪的技术设计
2.1 结构设计
电子受信仪包括方向与高低两部分,具体结构设计如图2所示。
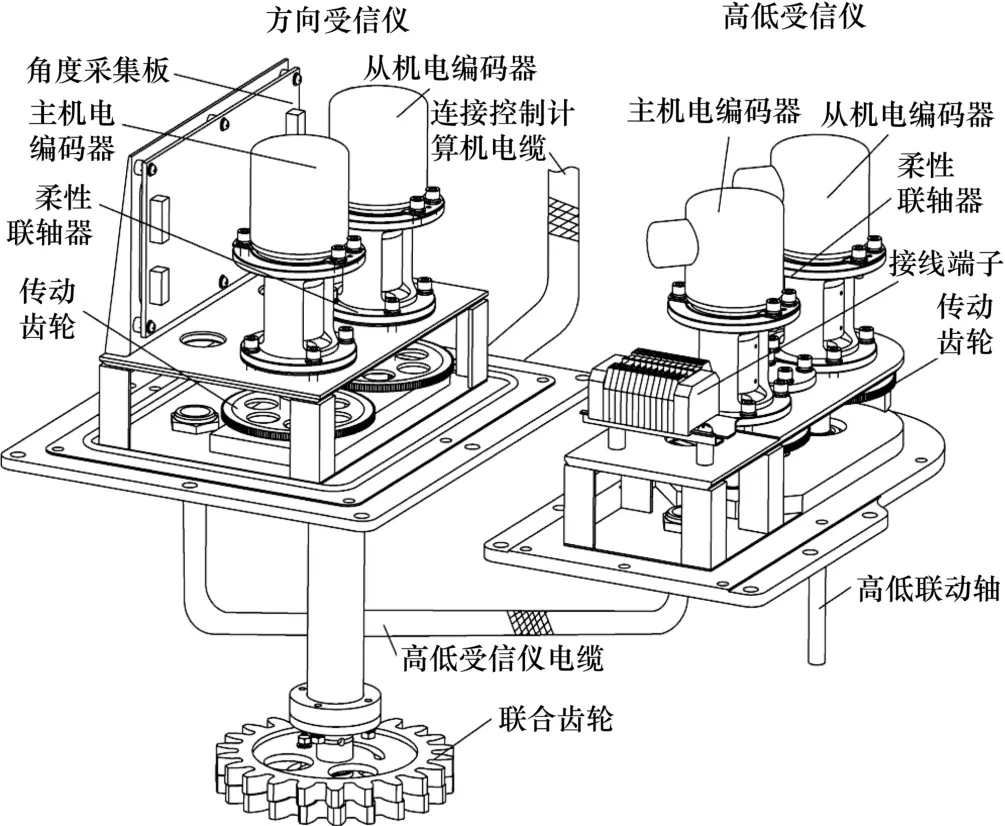
图2 电子受信仪结构
方向受信仪由箱体、传动齿轮、传动轴、柔性联轴器、主机电编码器、从机电编码器、角度采集板、电缆旋紧接头等组成;高低受信仪由箱体、传动齿轮、传动轴、柔性联轴器、主机电编码器、从机电编码器、接线端子排和电缆旋紧接头等组成。
考虑到齿轮传动系统制造误差、安装误差、齿轮浮动和系统弹性,受信仪的齿轮传动系统经多次仿真计算及改进设计[7]。受信仪的联合齿轮与发射装置回转支承外齿圈相啮合,受信仪的传动比使其内部的方向机电编码器的转动角度与发射装置回转的方向角度相一致(即为1∶1),机电编码器将采集的发射装置方向角度信号反馈给角度采集板进行信息处理。
高低机电编码器安装在炮架上,其输入轴与摇架上的耳轴相连接,传动比为1∶1,即高低机编码器转动角度与发射装置俯仰的高低角度相一致,并将发射装置的高低角度信号反馈给角度采集板进行信息处理。
2.2 电气设计
电子受信仪电路连接如图3所示,其电路连接关系如图4所示。智能角度采集板及4个机电编码器的电源由上一级控制计算机单元统一提供。智能角度采集板通过双路CAN总线(CAN3、CAN4)分别采集4个机电编码器数据。智能角度采集板通过双冗余CAN总线(CAN1、CAN2)与上一级控制计算机进行数据交换,主要是向控制计算机发送发射装置的运行、射界及角度信息,接收并执行控制计算机发送的各种指令[8]。

图3 电子受信仪电路连接

图4 电子受信仪电路连接关系
智能角度采集板主要包含微控制器LPC2294、电源模块、硬件看门狗模块、复位模块、EEPROM数据储存模块、控制信号输出模块及CAN通信模块。
电源模块采用DC/DC电源转换模块将外部提供28 V/G1工作电源转换成5 V模块工作电源,同时通过线性电源将5 V转换成3.3 V电源和1.8 V电源,供ARM7计算机LPC2294工作及部分集成电路使用,电源模块原理框图如图5所示。

图5 电源模块原理
硬件看门狗模块采用单稳态电路实现,当系统出现故障时,由硬件电路切断运行和射界信号输出的电源,避免整个系统误动作。
复位模块的功能是利用复位芯片输出低电平的脉冲来提供微控制器LPC2294的复位信号。当系统出现瞬时掉电时,系统自动复位,不至于出现死机或误动作。
EEPROM数据储存模块采用在智能角度采集板上设有一片EEPROM,微控制器LPC2294通过I2C总线与之通信,将射界、运行的配置数据存入。需要修改射界、运行数据时,控制计算机单元通过给微控制器LPC2294发送数据对之进行修改。
控制信号输出模块主要是由微控制器LPC2294根据采集的角度信息进行比较、判断,依据设定范围决策输出运行和射界控制信息,通过继电器将控制信号转换成28 V电源控制信号,供外部设备使用。
CAN通信模块采用微控制器LPC2294自带4路CAN控制器外扩CAN收发器实现,CAN收发器选用广州致远电子有限公司生产的CAN收发芯片CTM8251T,该芯片可以连接任何一款CAN协议控制器,实现CAN节点的收发与隔离功能。而该芯片内部集成了所有必须的CAN隔离及CAN收发器件,且隔离电压高达DC2500 V,能保证CAN总线数据的可靠收发。
2.3 软件设计
电子受信仪软件主要完成角度信息采集,并通过CAN总线实时传送给外部控制计算机。其工作流程如图6所示。

图6 电子受信仪工作流程
软件主要由CAN通讯模块、报文分析模块、数据比较模块组成。
CAN通讯模块主要功能是接收和发送CAN数据,主要包含以下功能函数。
(1)GetRecvBufData(void):获取接收缓冲区函数,将CAN1、CAN2、CAN3、CAN4接收到的数据,写入报文缓冲区。
(2)ReadCanRxBuf(eCANNUM CanNum):用于驱动将收到的CAN数据写入对应的CAN接收缓冲区。
(3)SetSendBusBufData(eCANNUM CanNum,uint8 dst_brdID,uint8 type,uint8*data):向发送缓冲区添加数据。
(4)SendBrain():CAN发送脑函数。
报文分析模块主要功能是对接收CAN1、CAN2的数据进行分析处理,主要包含以下功能函数:AnalyseCANBusRevData():对接收到的报文进行分析,并判断是什么命令且调用相关命令函数。
数据比较模块主要功能是对接收的主从机电编码器的数据进行分析处理,主要包含以下功能函数:MatchAngle():对接收到的主、从机电编码器数据进行比较分析。
3 电子受信仪技术实现中的主要问题
3.1 旋转编码器选型及同步比较
发射装置既要承受装置设备的动静载荷,又要传递舰船所受载荷,受力情况十分复杂,特别是在武器发射过程中,尾焰会给基座结构造成强大的冲击[9]。因此,旋转编码器要求具有较好抗冲击性、耐温性、抗腐蚀性。这对于回转精度要求较高的发射装置而言尤为重要[10]。
旋转编码器分为光电编码器和机电编码器,其中机电编码器在抗振性、耐温性、抗腐蚀性、抗灰尘及油污及抗干扰性等方面有很好的性能,更能适应恶劣环境的要求[4],考虑到使用环境及精度控制要求,旋转编码器选用单圈绝对值16位旋转机电编码器。
机电编码器通过机械齿轮传动机构带动其轴转动,获得实时的角度信息,通过CAN通信方式将采集角度的数字信号传递给智能角度采集板。机电编码器分为主、从机电编码器,其数据采集周期均为5 ms(采样周期可调)。智能角度采集板在对主、从机电编码器检测比较后将主机电编码器将采集的的角度值转发给上级控制计算机[11]。
智能角度采集板CPU单元每隔50 ms对主机电编码器与从机电编码器的角度值进行检测比较,若二者的角度差值始终小于0.5°,则认为主机电编码器的角度值可靠,可以输出给上级控制计算机;反之,则停止数据输出并报故障,提示停机整修。这样,任有一个机电编码器出现故障,电子受信仪即停止数据输出并报故障。
通过双机电编码器的采样及同步比较技术,使得电子受信仪既保证了数据输出的实时性又保证了输出数据的可靠性。
3.2 电子受信仪机械电气零位对准及状态监测
当发射装置处于机械零位时,通过电子受信仪发指令对机电编码器自动电气置零。省去了传统的机械、电气零位调整的大量调试工作量。
检测发射装置状态是否正常,扩展部分监测功能[12],如装置内部设置漏水检测板检测是否漏水,装置伺服调转时间及次数统计数据等功能,以提高发射装置的可靠性,减少发射故障。
3.3 电子受信仪机械精度控制
机电编码器传动轴设计为可调节轴,具备消除齿轮间隙的能力,可以有效提高传动精度,保证两个机电编码器同步;受信仪输入端为弹性联合齿轮与回转支承内齿相啮合,有效消除了间隙空回。
4 结束语
本文设计的电子受信仪采用双机电编码器采样角度,进行数据同步比较,采用软件指令快速准确配置运行、射界范围,出入运行、射界范围精度达到0.1°,通过软件指令,快速对主、从机电编码器电气置零或将机械与电气角度校准,采用EEPROM数据存储、修改运行、射界范围等多种方式实现智能化设计。
电子受信仪采用结构巧妙布局,取消机械开关,由继电器替代运行、射界机械开关,整体尺寸比旧版减小40%。其生产成本与传统受信仪持平,但大大提高了产品可靠性并极大节省调试时间及工作量。
电子受信仪由智能角度采集板及4个完全相同的机电编码器组合而成,方向、高低受信仪的机电编码器具备通用性,4个编码器可以任意互换,仅需设定零位。目前已列装于多型发射装置,经过长期试验及可靠工作,证明该设计达到了预期的设计要求。后续电子受信仪可通过更改啮合齿轮变比及CAN通信波特率实现适应各型发射装置的使用,实现电子受信仪产品系列化应用。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
数字海洋与水下攻防(2021年5期)2021-11-04
建材发展导向(2019年10期)2019-08-24
中国交通信息化(2019年6期)2019-08-23
装备环境工程(2019年7期)2019-08-21
弹箭与制导学报(2019年5期)2019-05-28
电子制作(2018年10期)2018-08-04
制造技术与机床(2017年7期)2018-01-19
西安工程大学学报(2016年6期)2017-01-15
现代防御技术(2016年1期)2016-06-01