海上风场与海岛微网交互调频机制及控制策略研究
2022-12-27 09:03王中权李卫东屈涛涛周胤博高会文
可再生能源 2022年12期
王中权, 李卫东, 綦 晓, 屈涛涛, 周胤博, 刘 敏, 高会文
(1.南方电网南方海上风电联合开发有限公司, 广东 珠海 519070; 2.暨南大学 能源电力研究中心, 广东珠海519070; 3.暨南大学 国际能源学院, 广东 珠海 519070)
0 引言
“粤港澳大湾区”能源供给与经济发展矛盾日益突出,为充分发挥大湾区区位能源优势、优化能源供应结构,截至2020 年底,大湾区已计划建设超过1 GW 装机容量的海上风电。 而大规模风电接入末端薄弱电网将对系统频率造成巨大冲击,严重影响电网安全稳定运行, 配套建设储能将极大增加运维成本。因此,有效协调闲置资源以提高海上风电调频能力,具有重要的研究意义和价值。
针对风电机组功率与电网频率解耦问题,虚拟惯量控制能够使风力发电机组模拟同步发电机转动惯量特性[1], 从而引起了研究人员的广泛关注。 文献[2]从传统同步系统频率响应机理出发,构建了系统频率响应的广义惯量响应体系及分析方法。文献[3]对风电机组PD 虚拟惯量控制的响应特性和响应机理进行了分析, 探究了虚拟惯量控制参数对风电机组参与系统调频的影响。 文献[4]进一步提出了风-火系统模糊自适应虚拟惯量控制策略。 文献[5]提出采用风电场额定功率5%的储能装置协助风电场惯量支撑, 从而使风电场具有接近于同容量同步发电机的惯量支撑水平。 文献[6]在原有传统虚拟惯量控制策略的基础上, 采用遗传算法离线优化不同转速下的频率控制系数。
针对风电输出功率的随机波动性, 利用储能装置的快速响应能力能够有效提高风电消纳水平[5]。 文献[7]采用PID 控制器对储能系统进行控制,以调节风电柴油发电系统频率,提升了频率调节效果。 文献[8]采用协同控制理论,设计了不同风速下运行在最大功率跟踪状态(Maximum Power Point Tracking,MPPT)的风电机组变系数控制策略, 以及储能协同风电机组提供调频响应的双层协同控制策略。 文献[9]考虑到风机实时储备电量和电池储能的荷电状态, 设计了一种自适应荷电状态反馈控制, 使电池储能的荷电状态尽可能保持在最优值。然而,通过配套储能系统虽能提高电力系统频率稳定性, 但当前储能装置建造成本居高不下, 使得系统运行经济性与频率稳定性之间存在冲突,难以两全。
目前,海岛微网群及海上风电研究相对独立,而交互环境下海岛微网群与海上风电分布式调频策略研究尚处空白。 本文以具有“粤港澳大湾区”区位能源特色的海岛微网群与海上风机群为研究对象,提出二者在交互环境下的调频机制。针对不同运行工况下风机惯量支撑能力, 设计了自适应动态量化因子, 以避免风机在调频过程中发生转速恢复状态跳变造成频率二次扰动, 从而有效提高了海上风电调频能力, 大幅缓解了对电网的冲击。
1 电力系统调频模型建立
1.1 海上风场多机等值模型
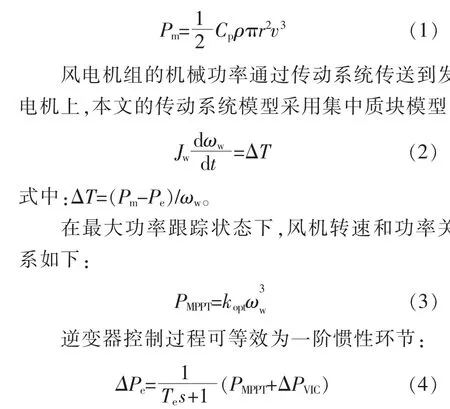
海上风场通常采用直驱永磁风力发电机组(D-PMSG), 简化后二阶多机等值并网频率响应模型如图1 所示。 图中:Pm为风电机组获取的机械功率;Pe为发电机输出的电磁功率;Cp为风能利用系数;ρ 为空气密度;r 为风力机叶片半径;ΔPVIC为风机虚拟惯量功率变化参考值;T 为电磁功率与机械功率的转矩差;ωw为风机转速;kopt为MPPT 最优跟踪系数;Jw为风电机组转动惯量;Te为逆变器响应时间常数。

图1 海上风场等值模型Fig.1 Equivalent model of offshore wind farm
风电机组获取的机械功率为[10]~[12]
1.2 海岛微网可调分布式电源模型
以珠海大万山岛微网、东澳岛微网、桂山岛微网为例,其存在大量冗余储能系统,大多以柴油发电机作为主供电源, 为便于仿真和控制器参数整定, 本文采用简化的储能系统模型和柴油发电机模型,其动态响应过程可表示如下[13],[14]:
式中:GDGi为柴油发电机组传递函数;TDGi为柴油发电机组惯性时间常数;Gbi为储能系统传递函数;Tbi为储能系统惯性时间常数。
1.3 单区域电力系统调频模型
以珠海电网结构为例, 搭建单区域负荷频率控制模型,如图2 所示,包括3 台600 MW 火电机组、120 MW 海上风电场、3 个海岛微网,以IEEE9节点标准模型为例,其拓扑结构见图3。 其中,火电机组模型包括发电机模型、 再热锅炉模型以及汽轮机模型[15],分别如式(7)~(9)所示,由于火电机组调频模型相对成熟,本文不再做详细阐述。
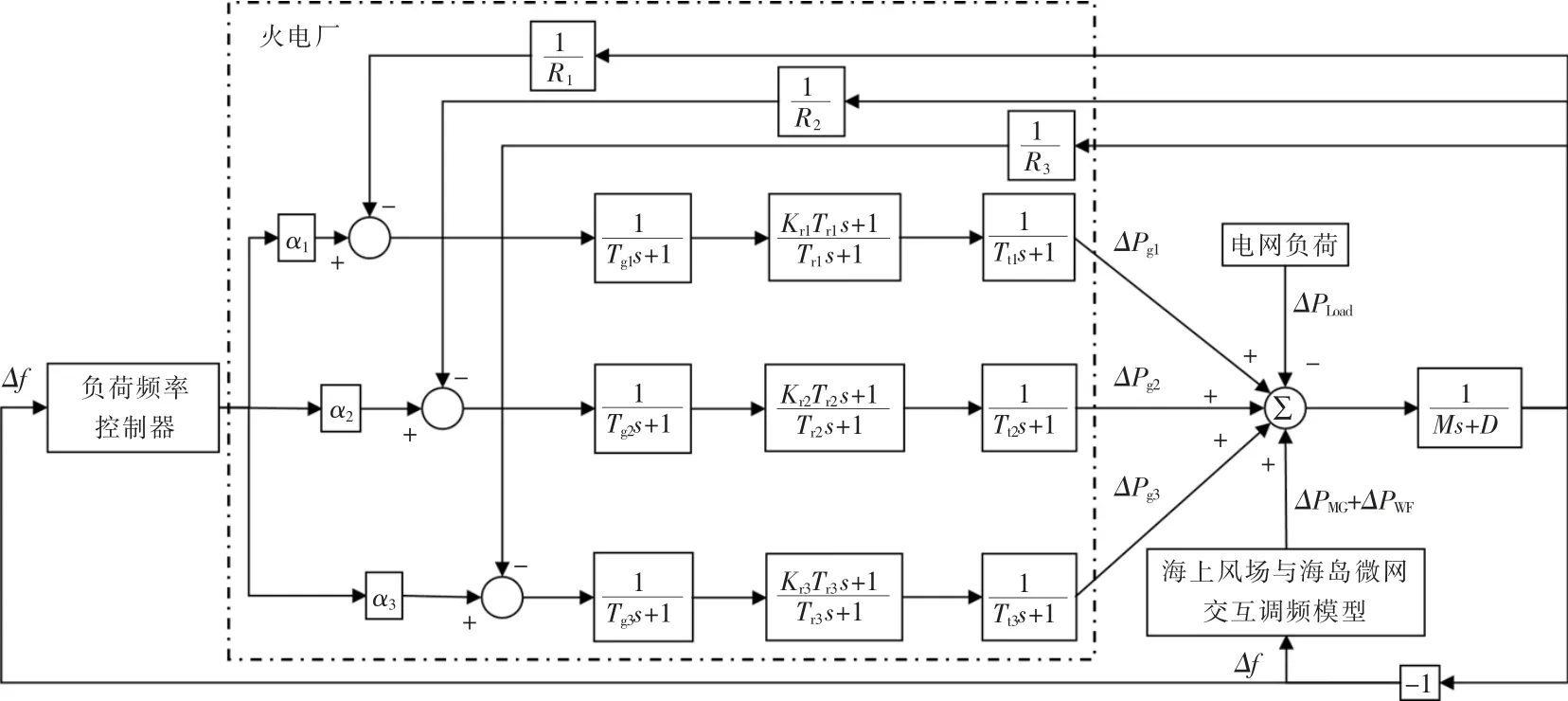
图2 单区域电力系统调频模型Fig.2 Frequency regulation model of single-area power system
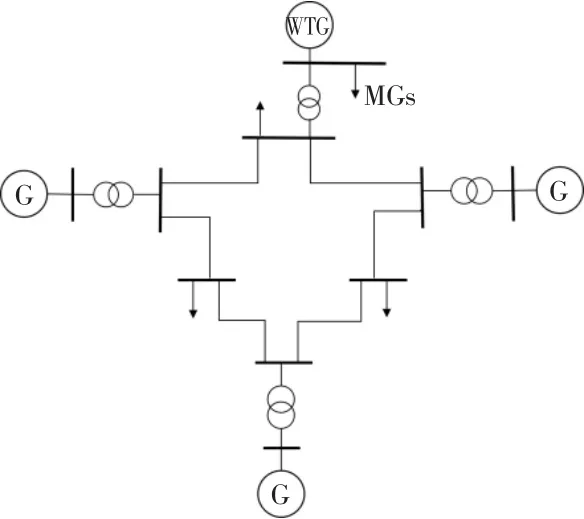
图3 IEEE9 节点电力系统拓扑图Fig.3 Topology of IEEE9-bus power system

式中:ui,Xgi和Tgi分别为第i 个火电厂锅炉的控制信号、出力及动态响应时间常数;Pri,Kri和Tri分别为第i 个火电厂汽轮机的功率输出、 增益系数及响应时间常数;Pgi和Tti分别为第i 个火电厂调速器功率输出及响应时间常数。
在单区域电力系统中, 发电功率与负荷需求之间的不平衡将引发频率波动, 该有功-频率动态过程可表示为

式中:M 和D 分别为系统的惯性常数和阻尼常数;ΔPgi为火电厂功率变化值;ΔPMG为海岛微网功率变化值;ΔPWF为海上风场功率变化值;ΔPLoad为电网负荷变化值。
本文采用的D-PMSG 模型参数[3]为Te=0.02,kopt=0.578 7,Jw=10.38;火电机组模型参数[15]为Tr1=Tr2=Tr3=7,Tt1=Tt2=Tt3=0.3,Tg1=Tg2=Tg3=0.2,Kr1=Kr2=Kr3=0.3,R1=R2=R3=0.02; 本文算例中的其他模型参数为M=25,D=0.5,TDGi=4,Gbi=1,Kp=5,Kd=1。
2 海上风场与海岛微网虚拟惯量控制分析
2.1 海上风场虚拟惯量控制分析
目前, 虚拟惯量控制方法是通过改变风电机组逆变器参考功率以控制输出电磁功率, 其通过计算频率偏差的微分信号模拟传统同步发电机机械惯性,即提供惯量支撑,通过频率偏差比例环节模拟传统同步发电机下垂特性,即一次调频过程,随后利用二者之和改变风电机组逆变器参考输入功率。 因此,当系统频率出现波动后,风电机组通过释放或吸收风电机组转子动能, 可快速调节输出电磁功率参与调频。
PD 虚拟惯量控制下,风电机组功率变化为[16]

此时,系统惯性时间常数增加了Kd。 在引入风机虚拟惯量控制环节后, 忽略频率变化引起的PMPPT变化,当扰动发生后,系统频率最大变化率可表示为

因此,虚拟惯量控制参数Kd可直接降低系统频率变化率。
2.2 海岛微网虚拟惯量控制分析
在微网中, 通常会配置一定数量的储能系统及柴油发电机, 而为了保证微网在孤岛运行的稳定性,在微网正常运行时,系统往往留有功率备用或冗余。 因此, 在保证微网运行稳定裕度的前提下,有效利用该部分电源,协同海上风电机组进行辅助调频, 对提高海上风场并网友好性具有重要作用。
为此,在虚拟惯量控制框架下,本文提出将海上风场虚拟惯量控制参考功率同时分配给海岛微网,对储能系统及柴油发电机进行功率调节,以此补偿不同风速下海上风场虚拟惯量的变化。 如图4 所示,海上风场与海岛微网可实现交互调频。

图4 海上风场与海岛微网交互模型Fig.4 Interaction between offshore wind farm and island microgrids
以珠海万山海岛新能源微网国家级示范项目为例,如图5 所示,桂山岛微网设有3 台1 MW 的柴油发电机和2 MW 2.4 h 的储能系统,东澳岛微网设有2 台1 MW 的柴油发电机和0.5 MW 6 h的储能系统, 大万山岛微网设有1 台1 MW 的柴油发电机和0.5 MW 4 h 的储能系统。 在理想情况下, 该分布式电源均可作为辅助海上风场提供惯量支撑的有效设备。图中实线为功率交互方向,虚线为信息交互方向。
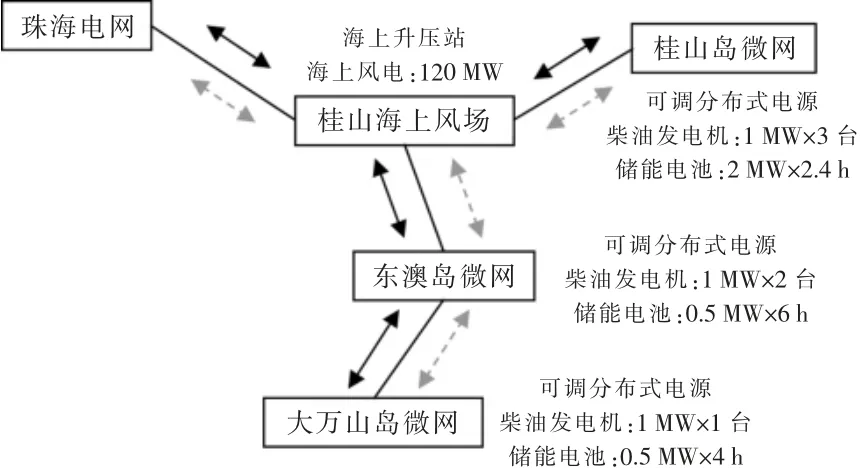
图5 珠海万山海岛新能源微网国家级示范项目拓扑图Fig.5 Topology of national demonstration project of Zhuhai Wanshan island renewable energy microgrid
3 交互调频机制及控制策略设计
海岛微网中分布式电源具备快速功率响应特性, 能够有效支撑海上风场实现稳定虚拟惯量控制。因此,本文利用柴油发电机和储能系统作为微网的可调分布式电源, 对海上风场虚拟惯量控制信号进行动态功率分配,此时,微网功率响应过程可表示为

式中:ΔPMG为第i 个微网的功率变化值;α 为动态功率分配因子。

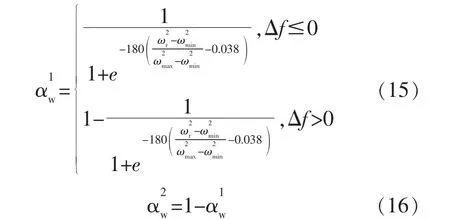
式中:ωr为风机转速;ωmax,ωmin分别为风机转速上限、下限。
如图6 所示,当负荷增加后,在风机转速接近额定转速上、下限时,为避免过度惯量调控引发风
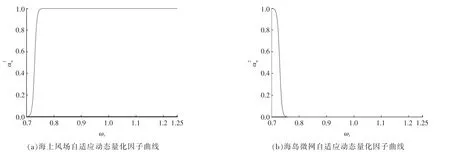
图6 自适应动态量化因子与风机转速的关系曲线Fig.6 The relation curve between the adaptive dynamic quantization factor and WTG speed

本文所设计的风机虚拟惯量控制的流程图如图7 所示。在自适应动态量化因子的作用下,图中风机转速越限情况的发生几率将大大降低, 可有效提高风机调频能力。

图7 风电机组虚拟惯量控制流程图Fig.7 Flow chart of virtual inertia control strategy
4 仿真结果分析
为验证所构建的海上风场与海岛微网交互调频机制的有效性, 以及所提出的自适应动态量化因子在避免风机发生转速恢复状态跳变方面的有效性, 本文基于图2 所示模型在MATLAB/Simulink 中进行了仿真实验, 分别完成了负荷阶跃扰动实验和风速跃变扰动实验。 所有物理量均采用标幺值计算(频率进行了等量转换)。
4.1 负荷阶跃扰动下系统动态响应特性分析
令风速保持在可能发生转速恢复状态跳变的范围,设为7 m/s,同时令负荷在50 s 处发生+0.1 p.u. 的阶跃扰动, 分别基于不同控制策略进行仿真,控制策略具体包括:
①without VIC:海上风场不参与调频;
②VIC of WTG: 海上风场通过PD 虚拟惯量控制参与调频;
③VIC of WTG and MGs:海上风场和海岛微网基于PD 虚拟惯量控制交互调频;
④adaptive VIC of WTG and MGs: 海上风场和海岛微网在自适应动态量化因子下基于PD 虚拟惯量控制实现交互调频。
如图8(a)所示:当发生负荷阶跃扰动后,系统最大频率偏差从风机不参与调频的0.077 Hz、传统PD 虚拟惯量控制下的0.061 Hz 减小至0.049 Hz,频率调节时间从200 s,150 s 缩短至70 s,表明海岛微网可调分布式电源可有效支撑海上风场参与系统调频,提供稳定的虚拟惯量支撑;同理,在自适应动态量化因子作用下,系统最大频率偏差和频率调节时间得到了进一步优化。 如图8(b),(c)所示,在发生负荷阶跃扰动后,传统PD虚拟惯量控制下的风机转速从0.717 p.u. 降至0.688 p.u., 下降了0.029 p.u., 风机输出功率从0.21 p.u. 上升至0.27 p.u., 使得风机转速跌落至0.7 p.u.以下进入转速恢复状态。 而所设计的自适应动态量化因子有效避免了风机参与调频导致的转速恢复状态跳变, 合理地将部分惯量支撑任务分配给微网可调分布式电源。如图8(d)所示,自适应动态量化因子作用下的微网功率响应峰值为0.078 p.u., 比传统PD 虚拟惯量控制的微网功率响应峰值0.05 p.u.高出0.028 p.u.,这表明在自适应动态量化因子作用下, 微网在系统调频过程中提供了更多的惯量支撑, 从而避免了系统频率遭受二次扰动,提高了系统频率稳定性。
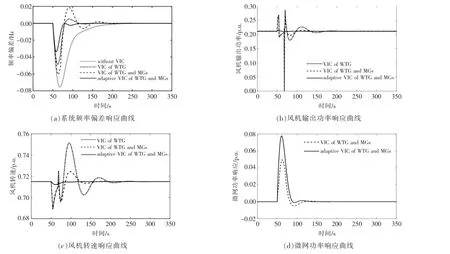
图8 负荷阶跃扰动下系统动态响应仿真结果Fig.8 Simulation results of system dynamic responses under load step disturbance
4.2 风速阶跃扰动下系统动态响应特性分析
当风速为8 m/s,在50 s 处发生-1 m/s 的阶跃扰动下,系统频率偏差响应曲线如图9(a)所示,系统最大频率偏差从传统PD 虚拟惯量控制下的0.026 Hz、海上风场和海岛微网基于PD 虚拟惯量控制交互调频下的0.021 Hz 减少至0.016 Hz,频率调节时间从200 s,150 s 缩短至130 s, 表明本文所提策略能大大地提高风电场的调频能力,稳定系统频率。 如图9(b),(c)所示,在风速阶跃扰动下, 传统PD 虚拟惯量控制下的风机转速从

图9 风速阶跃扰动下系统动态响应仿真结果Fig.9 Simulation results of system dynamic responses under wind speed step disturbance
5 结论
本文以珠海万山海岛新能源微网国家级示范项目为研究对象, 提出了海上风场与海岛微网交互调频机制,在不额外增建辅助设备的情况下,提高了海上风场的惯量支撑能力, 增强了电力系统频率稳定性。 所提出的自适应动态量化因子能够有效避免风机在提供惯量支撑过程中发生转速恢复状态跳变, 从而避免了由于转速恢复对系统频率所造成的二次冲击。
本文侧重海上风场整体惯量支撑及频率响应特性的分析,采用了多机等值模型。实际风场地理分布广,单机捕获风速不同,未来需从单机角度分析进一步研究和优化, 从而提高海上风场多机协同能力,使其能够更高效合理地参与系统调频。
猜你喜欢
现代电力(2022年2期)2022-05-23
成都信息工程大学学报(2021年5期)2021-12-30
海洋通报(2021年5期)2021-12-21
能源工程(2021年3期)2021-08-05
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
电子制作(2019年11期)2019-07-04
中国惯性技术学报(2018年1期)2018-05-10
能源(2017年8期)2017-10-18
通信电源技术(2016年6期)2016-04-20