基于二分法的车辆状态参数融合估计*
2022-12-27 08:26:22查云飞吕小龙刘鑫烨马芳武
汽车工程 2022年12期
查云飞,吕小龙,刘鑫烨,马芳武,2
(1.福建工程学院,福建省汽车电子与电驱动技术重点实验室,福州 350118;2.吉林大学,汽车仿真与控制国家重点实验室,长春 130025)
前言
随着汽车向着“四化”的方向发展,车辆主动安全与传感技术越来越受到专家学者的关注[1-3]。然而,车辆状态的部分参数难以被直接测量或成本昂贵,因此需要通过相关的算法来估计相关参数或降低成本。在车辆状态信号中,质心侧偏角、横摆角速度和纵向车速是智能车辆控制中最常用的状态信号,也是车辆状态估计中常用的估计目标。
当前常用的车辆状态参数估计方法有卡尔曼滤波及其改进算法[4-10]、融合估计算法[11-12]、神经网络估计算法[13-14],以及其他相关估计算法[15-16]。其中,为了解决单一状态估计算法在实际估计过程中可能出现初始噪声参数或数学模型参数不确定性的问题,研究人员将不同估计方法相融合,并利用算法的冗余来提升整个估计算法的稳定性。在融合算法的研究中,刘刚等[17]采用交互式多模型的融合方法将具有不同数学模型的容积卡尔曼滤波算法相结合,实现质心侧偏角与车轮侧向力的估计。陈特等[18]利用加权迭代的融合方式将强跟踪滤波算法与岭估计算法相融合,对纵、侧向车速和质心侧偏角进行估计。高博麟等[19]利用双卡尔曼滤波融合技术对简化魔术公式与车轮动力学公式结果进行融合,建立起路面附着系数与纵向车速的融合估计算法。Li等[20]利用自适应联邦融合算法将自适应辅助滤波算法与扩展卡尔曼滤波算法进行融合,实现了对质心侧偏角与横摆角速度的估计。Boada等[21]为降低噪声对质心侧偏角估计结果的干扰,将模糊推理算法与无迹卡尔曼滤波算法进行串联融合,得到了质心侧偏角融合估计算法。上述融合算法主要是基于数学模型进行融合,导致融合算法的结构复杂、计算量大且融合的算法存在同质性的问题。本文中针对由模型驱动的扩展卡尔曼滤波算法(extended Kalman filter,EKF)在实际估计过程中可能出现的问题,如测量噪声为有色噪声或负责测量值的传感器停用时,造成的估计结果不准确或停止估计的现象,以及由数据驱动的径向基(radial basis function,RBF)神经网络算法因为训练样本覆盖范围的局限性,导致训练后神经网络出现过拟合,使得估计结果出现“毛刺”现象,提出将两种估计算法相补偿的混合驱动融合估计方法。利用二分法平分区间以及非递归的特性,使其快速确定不同估计结果权值的大小。实现单个算法估计不精确时,采用融合算法的估计值依然能有较高的估计精度,由此实现抑制单一算法对不同目标估计时精度下降的问题,保证估计系统的可靠性和融合方法的普适性。
本文中首先基于车辆动力学模型设计扩展卡尔曼滤波算法,根据状态空间方程与观测方程的映射关系设计了径向基神经网络估计算法。通过车辆理论模型得到状态参数的变化趋势,再利用二分法判断两种估计算法的估计值与理论值的关系,实现权值的动态分配和车辆状态估计信息的加权融合。最后,通过CarSim/Simulink联合仿真和实车试验验证了该融合算法的有效性和精确度。
1 车辆动力学模型
基于线性2自由度车辆动力学模型,搭建具有横摆角速度、质心侧偏角和纵向车速的3自由度车辆动力学模型[22],如图1所示。
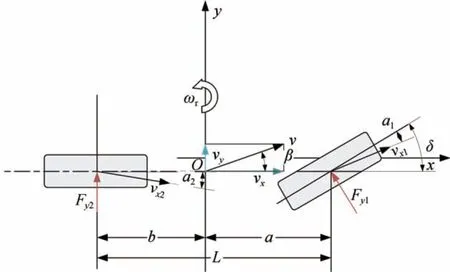
图1 3自由度车辆动力学模型
车辆3自由度动力学模型可表示为
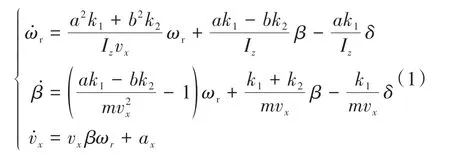
侧向加速度方程可表示为

前后车轮侧偏刚度[6]可表示为
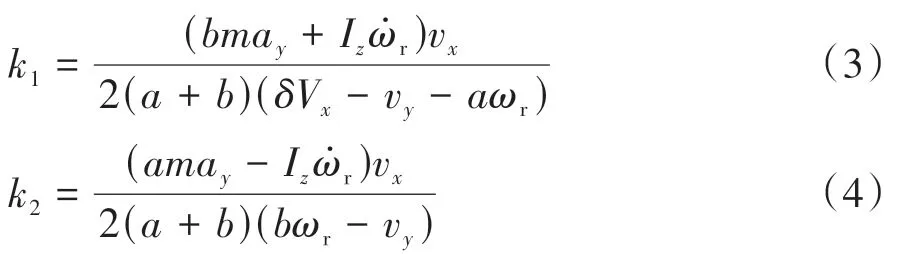
式中:ωr为横摆角速度;a为前轴至质心的距离;b为后轴至质心的距离;Iz为转动惯量;vx为纵向车速;β为质心侧偏角;δ为前轮转角;m为汽车质量;ay为侧向加速度。
2 车辆状态融合估计
为了抑制单一算法在某一时刻出现的估计精度漂移现象,提出了车辆状态融合估计方法,如图2所示。EKF估计算法与RBF神经网络算法分别对状态变量进行估计,并以车辆动力学理论值作为状态变量的参考趋势,将不同估计算法的估计值与目标状态的理论值作差。在估计算法融合中,利用二分法将差值之间的比例关系转换为不同估计算法的权重,实现对不同估计算法权重的动态分配融合出新的估计值。
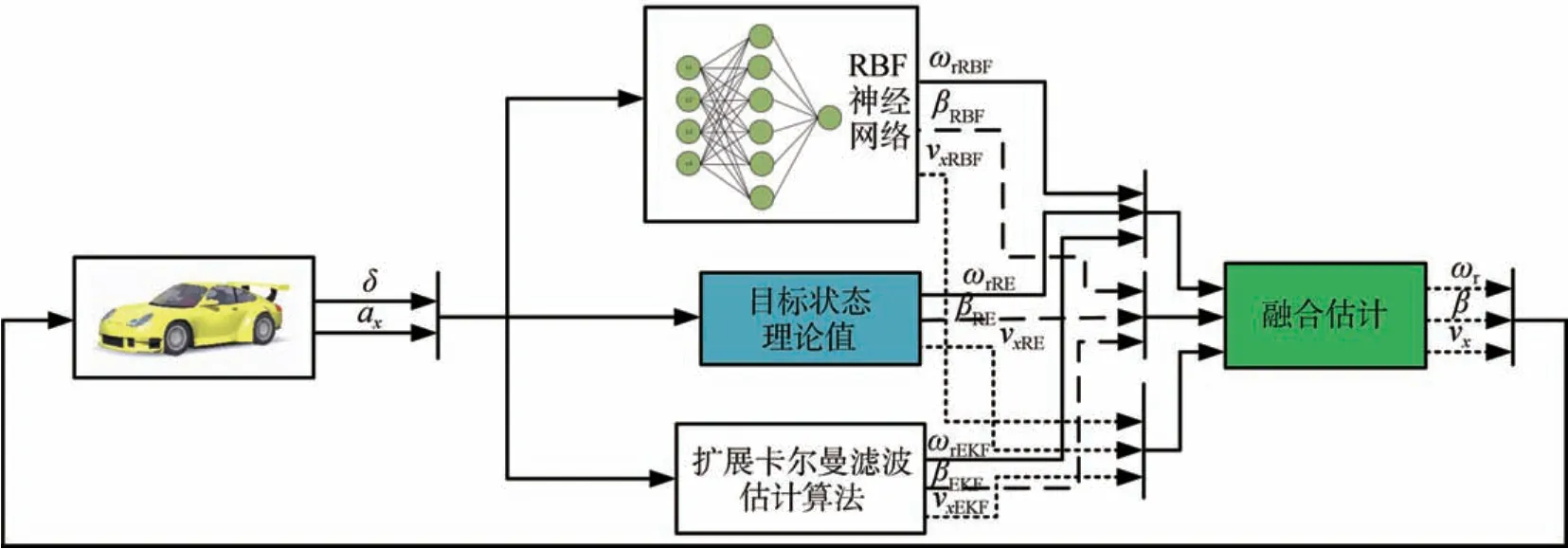
图2 基于二分法的状态估计方法
2.1 基于扩展卡尔曼滤波的车辆状态估计
考虑状态噪声和观测噪声,从式(1)和式(2)得到车辆动力学状态方程和观测方程为

式中:x(t)代表系统状态变量,且状态变量为横摆角速度、质心侧偏角和纵向车速;y(t)代表观测量,且观测量为侧向加速度;u(t)代表系统输入,且u(t)=[δ ax]T;q(t)代表状态噪声协方差矩阵,设置q(t)=I3×3·100;r(t)代 表 观 测 噪 声 协 方 差 矩 阵,r(t)=[0.01]。初始状态协方差矩阵设置为x0(t)=[0 0 23]T。
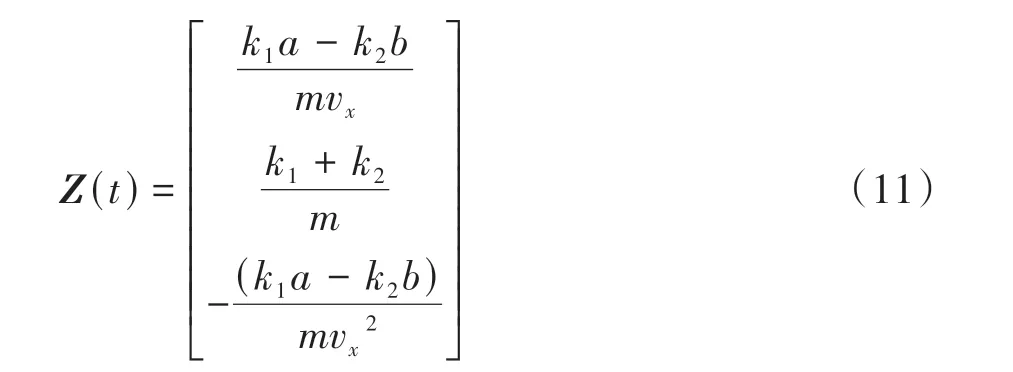
对式(5)状态方程和式(6)观测方程求偏导数,得到雅可比矩阵:
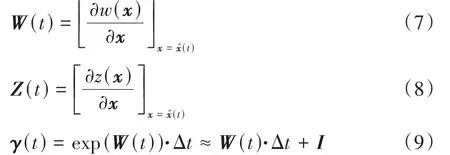
式中:W(t)表示状态函数对状态变量求偏导的雅克比矩阵;Z(t)表示观测函数对状态变量求偏导的雅克比矩阵;γ(t)表示状态转移矩阵;△t为采样时间。
从式(7)和式(8)的雅克比矩阵可得线性化模型为

EKF的工作流程如图3所示,主要分为预测过程和修正过程。预测过程是根据当前时刻的状态进行计算后得出下一时刻的状态,修正过程是通过传感器所获得的观测量结合估计结果进行权值拟合得出最后的估计结果。
图3中,P代表误差协方差矩阵,Ja和JH分别代表对状态方程和观测方程对状态变量偏微分的雅克比矩阵,H代表观测矩阵,K代表卡尔曼增益,h(x)代表通过观测矩阵所得到的测量值。
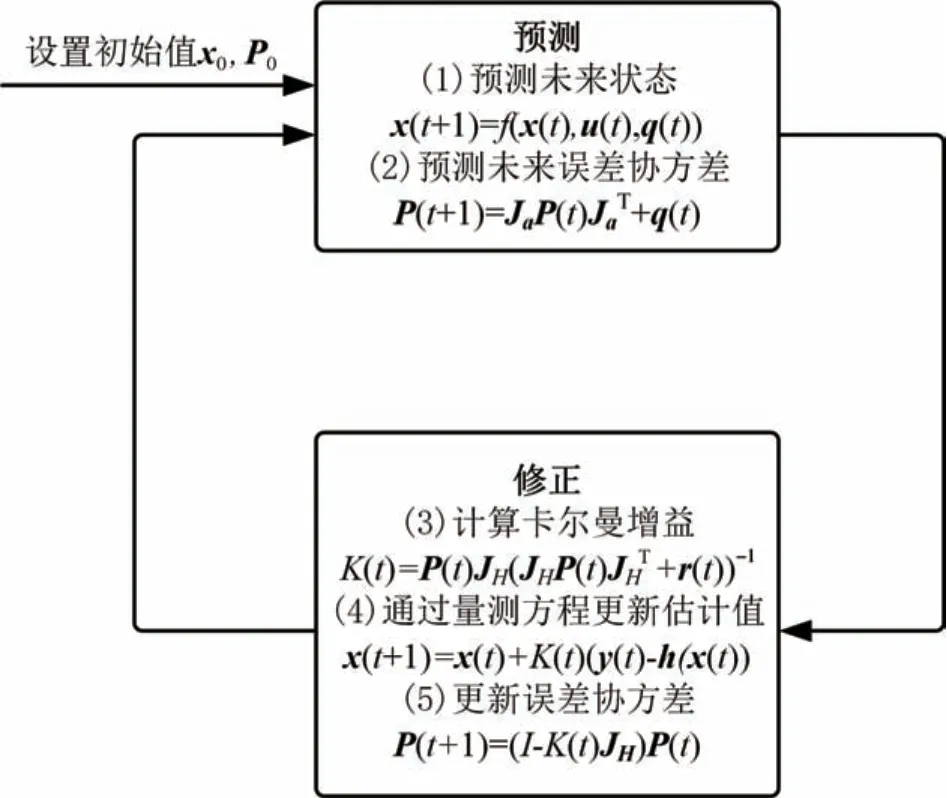
图3 EKF的工作流程图
2.2 基于径向基神经网络的车辆状态估计
径向基神经网络是一种以高斯(Gaussian)函数为激活函数的人工神经网络,能够近似任何的非线性函数,具有极强逼近特性,常被用于非线性系统的目标估计[23]。
通过式(1)所得到的车辆3自由度动力学模型,将其转换成函数形式为

式中:̂(t+1)为系统状态变量t+1时刻的状态;x(t)为系统状态变量t时刻的状态。
从式(12)可以看出,系统状态变量的变化情况由系统输入决定,与状态输入具有映射关系。因此,当系统输入ax、δ确定时,横摆角速度、质心侧偏角和纵向车速的方程必有唯一解。即ωr、β、vx分别与ax、δ构成确定的映射关系:

通过CarSim与MATLAB/Simulink联合仿真采集数据样本,为了使训练样本能覆盖车辆的行驶操纵工况,设定如表1所示的运行工况。
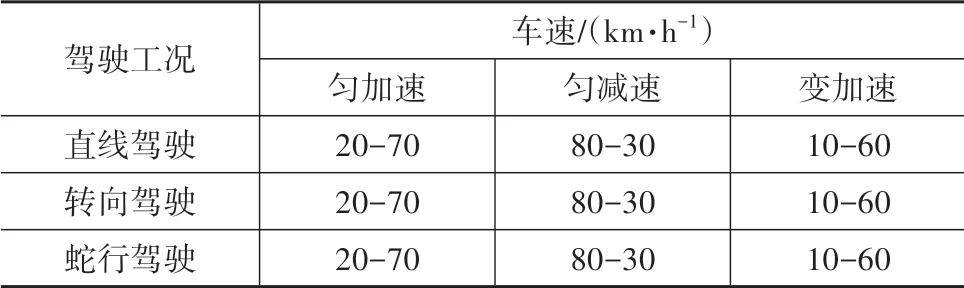
表1 获取训练样本的驾驶工况
将采集到的前轮转角和纵向加速度作为神经网络的输入,以其对应的横摆角速度、质心侧偏角和纵向车速作为神经网络输出,采集到的数据分成训练样本和验证样本两部分。训练样本用于进行神经网络训练,验证样本用于验证神经网络的训练情况。基于MATLAB设计RBF神经网络,并采用监督学习的方法进行训练,训练好的RBF神经网络可用于车辆状态估计。
为了减少神经网络的训练时间,将所采集的数据进行差值处理后得到3 000组训练数据,其中隐含层中的神经元数由Kolmogorov定理确定,隐含层神经元个数S和输入向量元素个数N的关系为S=2N+1,得到隐含层神经元个数为5。
在RBF神经网络的训练过程中,首先进行误差ej的计算:

式中:dj为期望输出;(fX)j为网络估计输出;Xj为第j个神经元输入;Ti为神经元中心;ωi为连接权值。
输出权重改变量计算可表示为

式中:N为总输入样本个数;σi为第i个隐含节点常数。
连接权值可调整为

式中η1为调整连接权值时的学习速率。
隐含层神经元中心改变量的计算可表示为
式(16)中调整中心Ti可表示为

式中η2为调整中心改变量时的学习速率。
输出权重改变量计算为
调整宽度表达式为

式中η3为中心宽度调整时的学习速率。
总误差值计算为

重复式(16)~式(23)计算,直到满足总误差值在允许范围内或达到指定的迭代次数,则训练结束。
2.3 估计算法融合
二分法是以不同算法与基准值的差值大小作为分配权值的依据,基准值需要能够准确反映目标的变化趋势。通过车辆动力学分析得到的理论值能很好地表达估计目标的变化趋势,且不存在参数不确定性的问题。因此,采用车辆动力学分析得到的理论值作为二分法的基准值,纵向车速、横摆角速度、质心侧偏角的计算分别可表示为
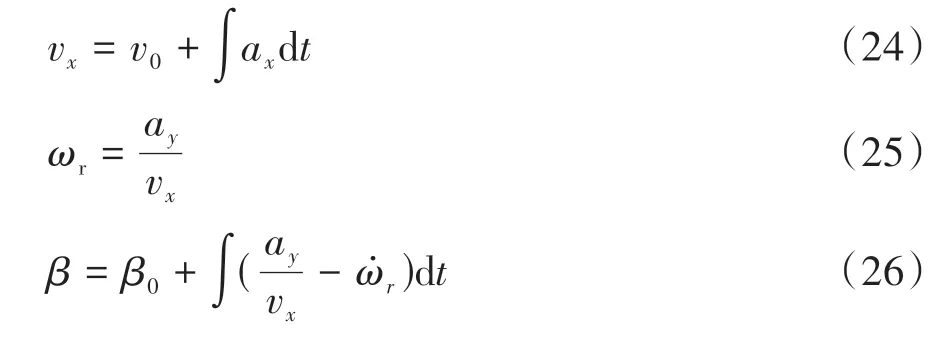
式中的ax和ay可由相关传感器实时获取。
基于二分法的算法融合估计示意图如图4所示,在每个计算步长中,算法1与算法2的估计值分别与基准值作差,差值大小与位置关系将会影响权值分配。
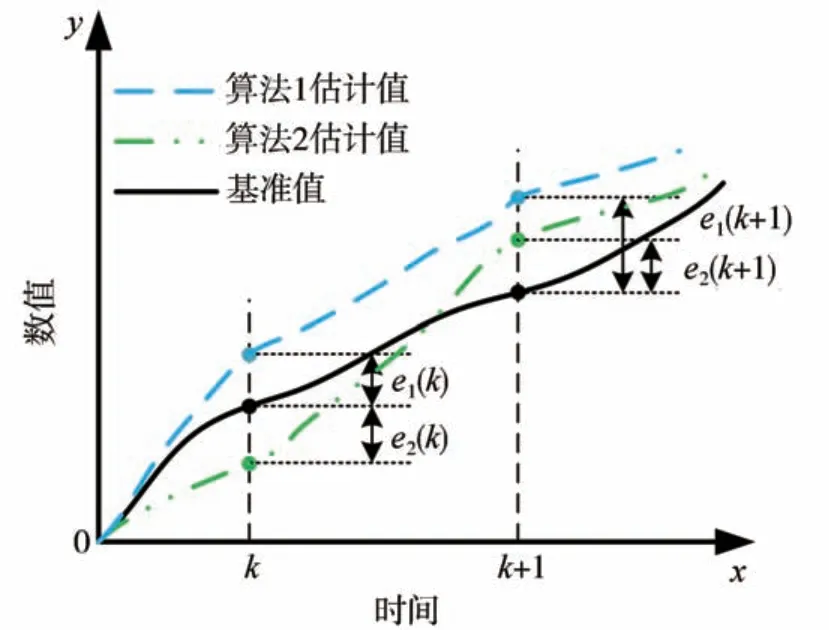
图4 二分法差值示意图
在某一时刻k,设e(1k)是算法1和基准值的计算误差,e(2k)是算法2和基准值的计算误差。通过二分法确定e(1k)和e(2k)之间的比例关系,将这种比例关系转换成权值的形式,分配给不同估计算法,并更新当前时刻的估计值。
在分配权值过程中,首先获取目标的估计值与基准值,并计算不同估计值与基准值的差值e(ik)(i=1,2):
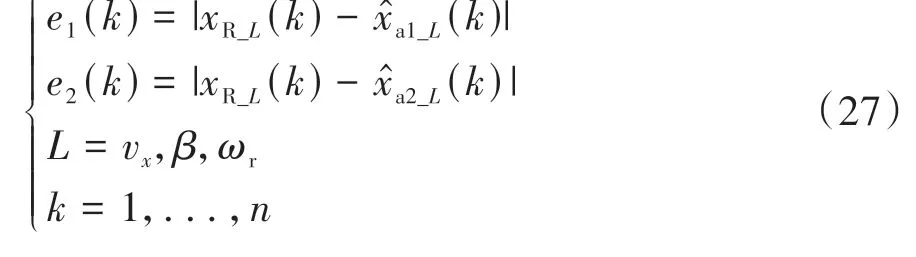
式中:xR_L为基准值;为算法1的估计值;为算法2的估计值。
设置权值精度ϑ、初始化权值寻找范围[a1,b1]与中点c1,且c1=(a1+b1)/2。
查找范围精度|bi-ai|>ϑ时,触发二分法查找,直到权值精度达到要求,输出此时估计误差较大的算法对应的权值,其查找流程图如图5所示。
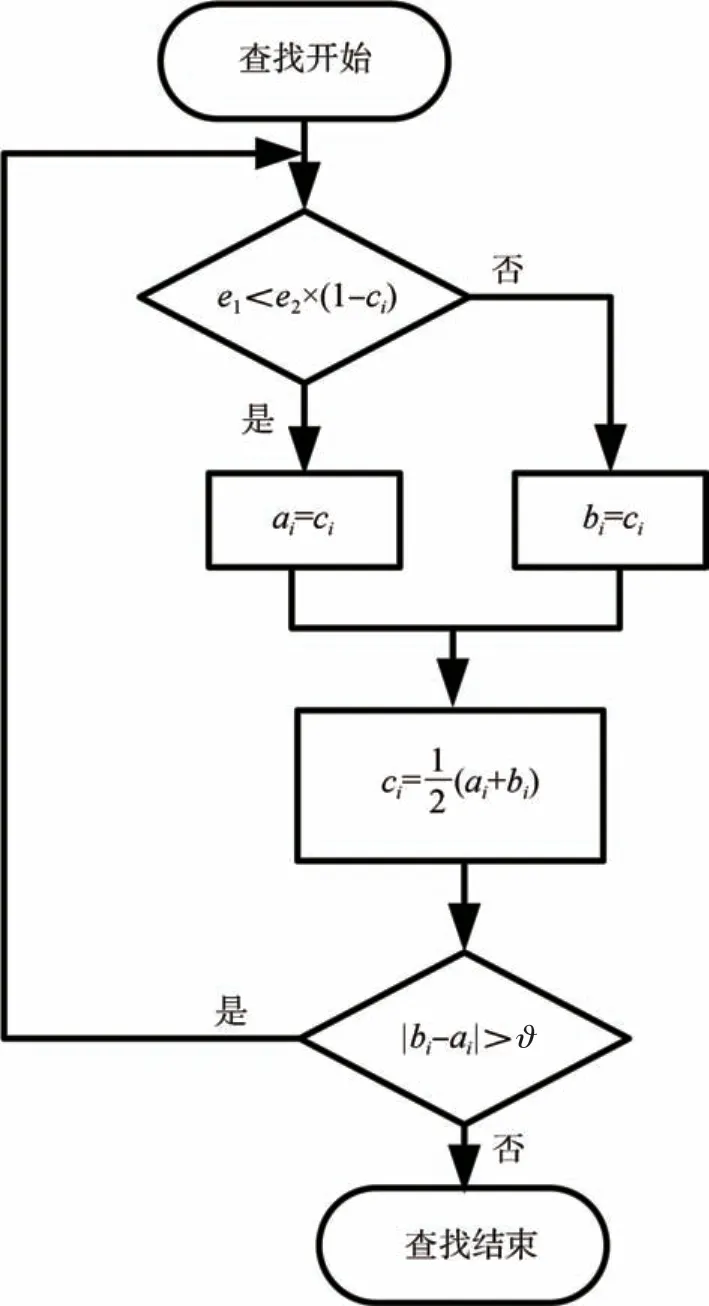
图5 二分法查找权值流程
假设在第k时刻,算法1估计值与基准值误差大于算法2,此时不同估计算法对应权值表达式为
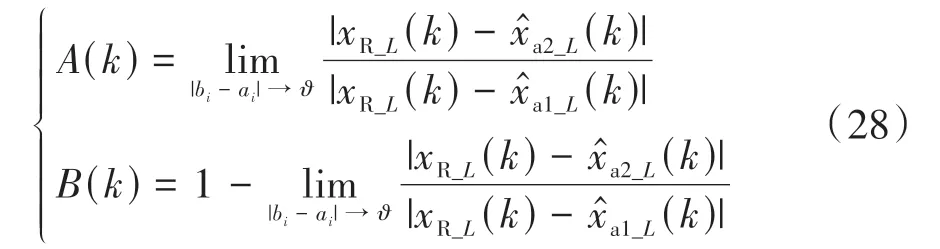
计算融合后估计值,可得

式中y(Lk)为第k时刻时最终估计值。
此外,当传感器噪声不为高斯噪声或测量方程输入的传感器损坏时,导致EKF算法失效,则最终的估计结果由RBF神经网络提供,保证相关控制系统能够有持续的状态参数输入。
3 融合算法验证
3.1 仿真验证
采用CarSim与MATLAB/Simulink进行联合仿真对提出的融合估计算法进行验证。在CarSim软件中设置的汽车相关参数如表2所示,驾驶工况设置为双移线,由CarSim软件输出真实值。
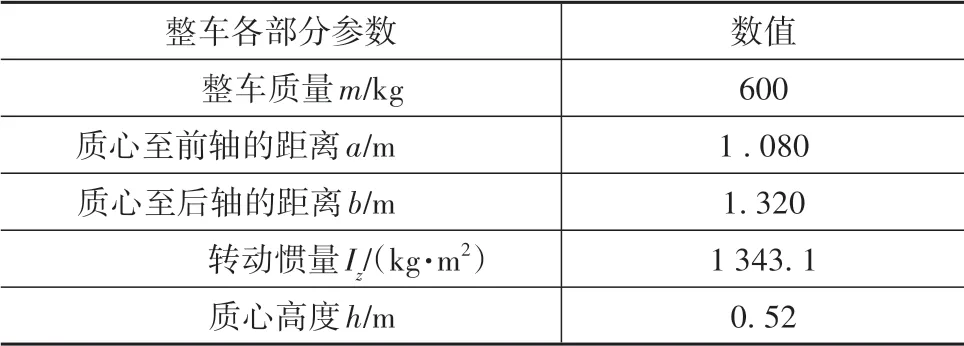
表2 仿真软件中汽车模型的相关参数
最终仿真结果如图6~图8所示,图中ω/β/vxof EKF、ω/β/vxof RBF分别代表通过EKF、RBF神经网络估计的横摆角速度、质心侧偏角和纵向车速,ω/β/vxof TRUE为CarSim输出的真实值,ω/β/vxof OPT为经过算法融合之后的估计值。

图8 不同算法下估计的纵向车速与真实值
不同算法的估计效果如图6所示,从图中可以看出单一算法对横摆角速度进行估计时,EKF在前2.3 s能够准确地对横摆角速度进行估计,而RBF神经网络的估计精度会有轻微波动。
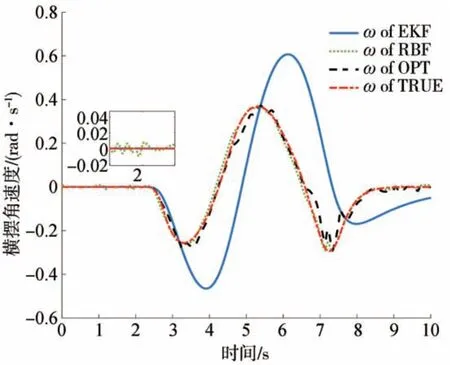
图6 不同算法下估计的横摆角速度与真实值
在权值分配下,该现象被抑制,从第2.3 s至结束,RBF神经网络估计精度均优于EKF。因此,RBF神经网络所匹配的融合权重系数相应增大,意味着在当前计算步长内的融合估计结果中RBF神经网络估计所占比重增加。经过算法融合后的估计结果与真实值进行对比,能够看出最终输出的横摆角速度估计结果与真实值保持较高的一致性。
不同算法对质心侧偏角的估计效果如图7所示。EKF算法和RBF神经网络算法所得出的质心侧偏角估计值都极为接近质心侧偏角真实值。但RBF神经网络在前2 s对质心侧偏角的估计精度有轻微波动,通过算法融合能够结合不同算法的估计优势,通过权值分配的方式能够有效抑制这一波动,并能够稳定且保持较高精度的输出质心侧偏角估计值。
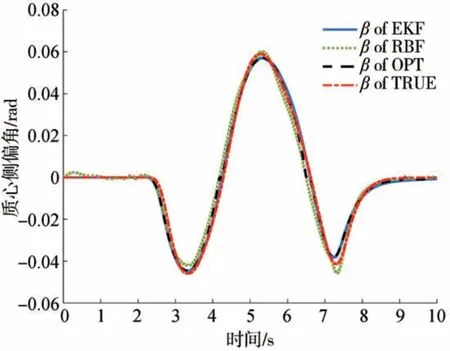
图7 不同算法下估计的质心侧偏角与真实值
不同算法对纵向车速的估计效果如图8所示。EKF估计的纵向速度变化率较低,但速度变化趋势与实际速度一致。而RBF神经网络在前3 s内,对纵向车速的估计精度具有较大波动,系统输入的参数突然超出训练集的范围,造成神经网络的泛化能力下降是产生估计偏差的一个诱因。RBF神经网络对纵向车速的估计精度随着时间的增加逐渐提高,与真实值的偏差逐渐减小。通过算法融合得到的纵向车速估计值在前1.8 s内有较大误差,但随后逐渐消除偏差,使算法融合后的纵向车速与真实值能够保持较高的一致性。
利用估计误差的均方根值作为评价指标,其定义为

式中:̂代表最终估计结果;yi为真实值;n为采样次数。
估计误差的定量分析结果如表3所示,表中EKF代表扩展卡尔曼滤波算法,RBF代表径向基神经网络算法,OPT代表融合算法。

表3 车辆状态参数的估计误差分析
从表3可知,经过估计算法融合之后,融合算法对横摆角速度的估计精度分别比EKF和RBF神经网络提高了97.11%和46.31%,相较于其它融合算法[11]的横摆角速度估计误差0.006 7提升了23.8%;对质心侧偏角的估计精度分别比EKF和RBF神经网络提高了66.70%和80.01%,相较于其他融合算法[24]的质心侧偏角估计误差0.005 0提升了48%;对纵向车速的估计精度分别比EKF和RBF神经网络提高了66.90%和12.02%,相较于其他融合算法[25]的纵向加速度估计误差0.687 6提升了36%。从以上分析可得,本文提出的融合方法相较于单一估计算法在估计精度上具有明显优势。
3.2 实车在环验证
通过CarSim与MATLAB/Simulink联合仿真结果,初步验证了基于二分法的车辆状态融合估计方法的可行性。本节通过搭建的人-机共驾实验平台进一步验证车辆状态融合估计方法的有效性。受到设备采集条件的限制,本试验仅对横摆角速度和纵向车速估计结果进行验证。选用双移线工况,利用融合估计算法对横摆角速度以及纵向车速进行估计,并与设备所采集的真实值进行对比。验证工作流程图如图9所示,图9中,ωr_exp、vx_exp分别为设备采集的横摆角速度及纵向车速。
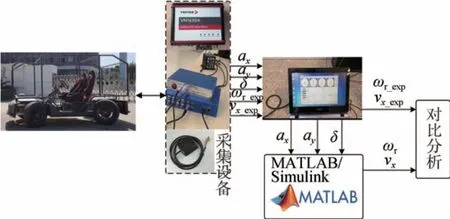
图9 实车验证工作流程图
在环验证所涉及的硬件设备包含:人-机共驾平台、上位机、CANoe分析仪、陀螺仪、GPS天线等。通过CANoe分析仪、陀螺仪和GPS天线,采集车辆在行驶过程中的前轮转角、横摆角速度、纵向车速、纵向加速度和侧向加速度等状态参数。试验场地路面为干燥且路况良好的混凝土路面,其中干燥混凝土路面附着系数约为0.8~1.0,贴近仿真试验的道路设置,减少由于附着系数不一致而造成的估计精度下降。同时,试验场地开阔,使系统能够接收足够强的GPS信号,确保测量精度。
所采集的数据分为两部分:一部分用于RBF神经网络的训练;另一部分数据作为算法融合的输入,用于横摆角速度、纵向车速的估计。最后将采集的横摆角速度和纵向车速与估计结果进行对比,验证所提出的融合估计方法。
用于估计算法输入的相关参数曲线图如图10所示,包含了纵向加速度、侧向加速度和前轮转角。
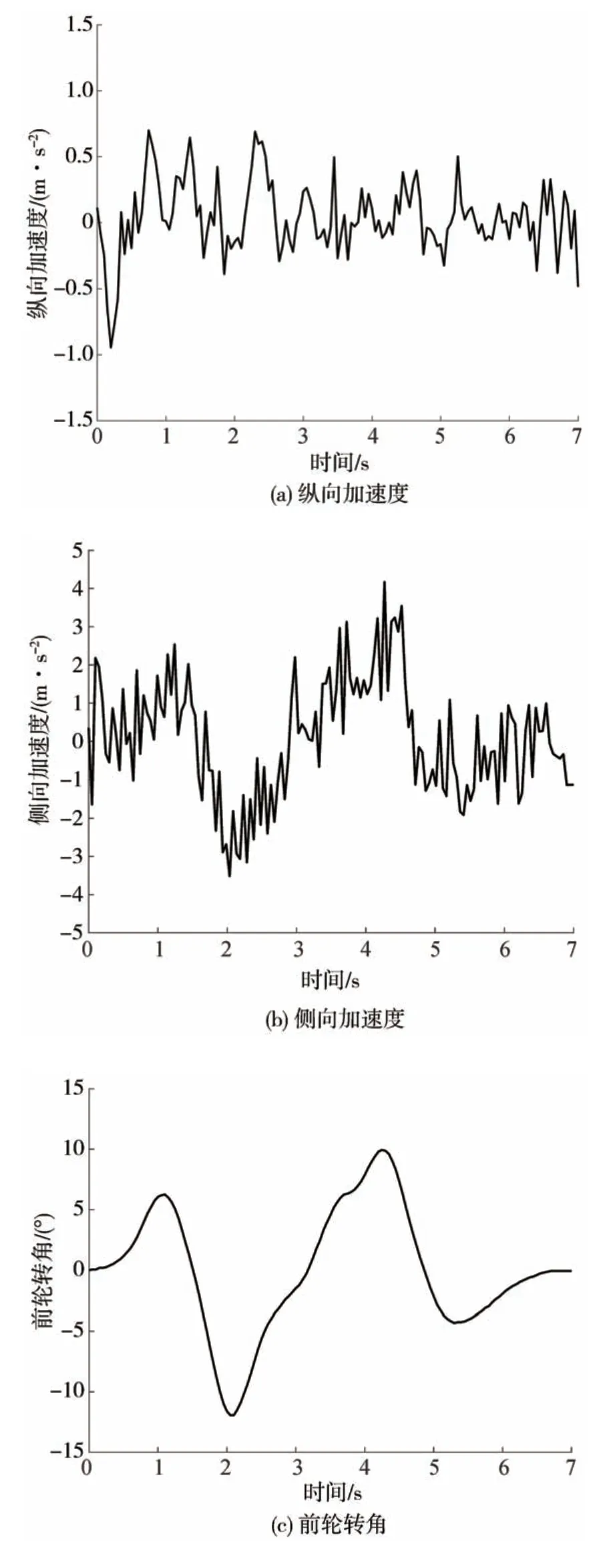
图10 用于估计算法的输入参数
横摆角速度和纵向车速的测量与估计值对比结果如图11和图12所示,图中ω/vxof EXP为测量所获得的横摆角速度和纵向车速值。从图11和图12可以看出,经由算法融合之后的估计结果与真实值保持了较高的一致性。
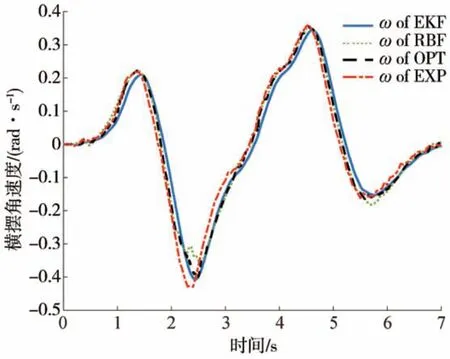
图11 不同方法下得到横摆角速度值
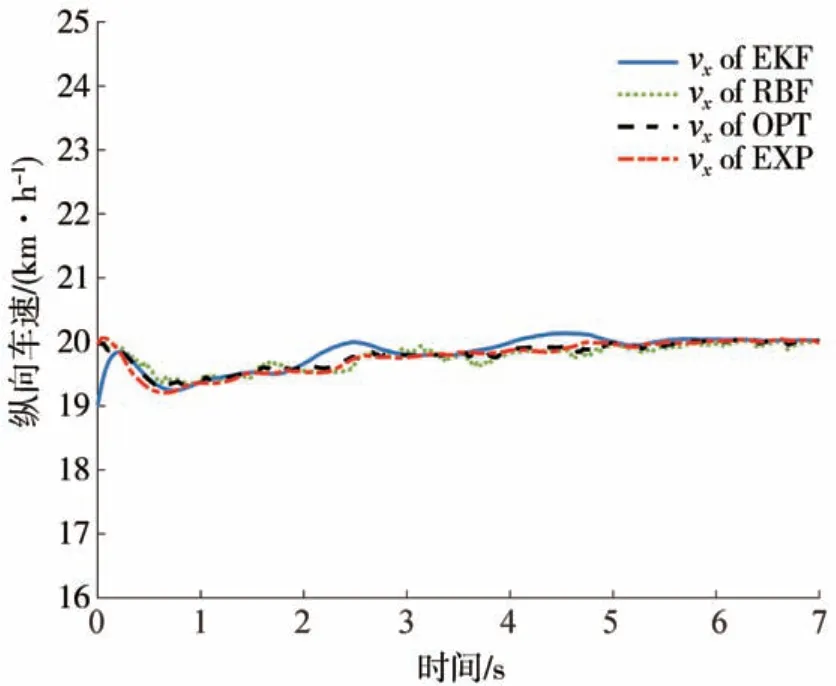
图12 不同方法下得到纵向车速值
横摆角速度与纵向车速最终估计误差的定量分析结果如表4所示。从表4可以看出,算法融合后的横摆角速度估计误差相较于EKF和RBF神经网络单一估计算法分别提升了90.45%和87.76%;算法融合后的纵向车速估计误差相较于EKF和RBF神经网络单一估计算法分别提升了92.47%和66.80%。

表4 实车状态参数的估计误差分析
通过实车在环验证可以看出,基于二分法的融合算法在实车情况下对车辆状态参数估计达到了很好的精度,进一步验证了所提的融合估计算法的有效性。
4 结论
(1)设计了基于模型驱动的扩展卡尔曼滤波算法和基于数据驱动的径向基神经网络算法相融合的估计算法,通过二分法对两种算法的权值进行分配。在提高估计算法精度的同时,提高估计算法的容错性。
(2)基于CarSim与MATLAB/Simulink的联合仿真对所设计的融合算法进行了验证。结果表明,该融合估计算法对横摆角速度、质心侧偏角和纵向车速的估计都具有很高的精度,相对EKF和RBF神经网络单一算法而言,精度提高最少12.02%,最大97.11%。
(3)通过人—机共驾平台和测试设备,采用实车在环对所设计的融合算法进行了验证。结果表明,该融合算法对横摆角速度和纵向车速的估计具有很好的精度,相对EKF和RBF神经网络单一算法而言,精度提高最少66.80%,最大92.47%。
综上,本文提出的基于扩展卡尔曼滤波算法和径向基神经网络算法相融合的估计算法具有很高的精度,对提升车辆状态估计提供了思路,具有很好的工程应用价值。
猜你喜欢
中国交通信息化(2021年1期)2021-06-11 01:23:44
中学生数理化·自主招生(2021年3期)2021-05-30 10:48:04
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21 02:10:20
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
中学生数理化·七年级数学人教版(2018年3期)2018-05-30 06:58:16
物理教学探讨(2018年1期)2018-02-13 09:26:52
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06