上海里弄建筑甄别中的三维测绘技术应用
2022-12-26 06:48:30■杨敏
住宅科技 2022年12期
■ 杨 敏
0 引言
近年来,随着上海旧区改造工作的深入推进,旧改地块中历史建筑的留存备受关注。根据普查成果,旧式里弄(简称旧里)街坊与历史文化风貌区、风貌保护街坊高度重叠[1],旧改范围内的里弄建筑约84%都是历史保护建筑(简称历保建筑),有一定的风貌价值。对此,上海坚持“留改拆”并举,以保留保护为主的方针。
里弄建筑甄别是旧改项目中的基础性工作,是对区域内历史建筑价值的初步鉴定及现状情况的客观摸底。由于这些建筑建设年代都较为久远,基本没有图纸资料,且大部分经过多次改建、搭建,测绘工作便成为其中一个尤为重要的环节,其深度及全面性将直接影响到甄别报告的整体质量。传统测绘采用全站仪、测距仪、卷尺等设备,基本属于一维到二维的测量手段,其精确度与现场技术人员的测绘水平有很大关联,成果也只局限于点、线、面,工作效率较低,难以达到里弄历保建筑的测绘深度要求;而三维激光扫描和无人机倾斜摄影技术作为目前较为热门的实景三维测绘技术,能够根据点云数据或倾斜影像,自动生成具有高精度、高分辨率,带有空间坐标及纹理信息的三维数据模型,已广泛应用于测绘测量、地理信息系统、城市规划、建筑设计与施工、智慧城市、文物历保建筑等领域。本文将以上海某里弄历保街坊为例,对上述两种三维测绘技术在甄别工作中的应用进行介绍,为同类的旧改项目提供参考借鉴。
1 三维激光扫描技术与无人机倾斜摄影技术
1.1 三维激光扫描技术
三维激光扫描技术又称为实景还原技术,采用非接触式高速激光测量方式,利用向被测对象发射激光束和接收由被测物发射回的激光信号,获取被测对象的空间坐标信息,得到所需的海量“点云数据”,并通过点云数据全面、快速地重构出目标三维模型及线、面、体、空间等各种制图关键数据,据此进行测绘、分析、仿真、模拟、监测等后续工作。其技术路线主要包括现场踏勘、现场扫描作业、点云数据处理、综合应用[2](图1)。

图1 三维激光扫描主要技术路线
1.2 无人机倾斜摄影技术
无人机倾斜摄影技术是在传统航测的基础上,搭载多个传感器,同时从多个角度采集影像,在上空以极高效率按照拟定航线进行多方位的三维数据采集;经专业软件处理后,可对现实场景进行快速建模,其照片影像同样带有纹理信息并具有可量测性,成果形式包括三维模型、三维点云、正射影像、数字表面模型等。其技术路线主要包括现场勘查、现场航测作业、影像数据处理、综合应用等[3](图2)。

图2 无人机倾斜摄影主要技术路线
2 案例概况
上海某街坊占地面积约39 630 m2,居民户数3 010 户,是该行政街区近年来实施旧区改造体量最大的地块。片区内房屋为典型的“石库门”里弄建筑,大多建造于1912—1936年,是砖木结构的旧里(图3)。本次旧改工作的目标是:以分级保护的方式保留风貌肌理、实现文化传承,探索里弄旧区改造的新模式。为实现这一目标,首先要做好里弄建筑的甄别工作;而测绘作为这一切的先驱,其结果的深度和全面性将起到决定性作用。
3 三维激光扫描技术应用
3.1 现场扫描与数据处理
对案例街坊进行初步踏勘,将整体里弄建筑群按照保护等级划分成若干区域块(图3中以蓝线划分),并根据各区域块情况初步拟定相匹配的扫描精度。以西侧的区域块为例,该区域为街坊中保护等级最高的地块,在设计扫描架站路线方案时,大原则是力求以最少的测站数来覆盖该区域块的建筑范围。因此,首先要尽可能保证路线不重复;同时,为了保证扫描成果的整体精度,设计路线的最后要与初始站点形成闭合(图4)。考虑到现场普遍较窄,选用以重合率方式进行各测站的拼接(即对相邻测站之间扫描的重叠范围进行拼接)。

图3 街区地块范围图
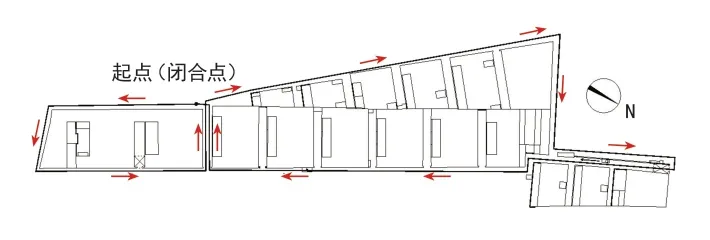
图4 西侧区域地块扫描路线布置方案
(1)在扫描过程中,根据里弄建筑间距小的特点,建筑间的廊道使用蛇形架站扫描方式进行,且测站应覆盖外围巷道及天井内院;对于重点特色保护部位,可选择更合适的扫描精度进行进一步的窗口框选扫描;对于需要的典型剖面测绘成果的建筑单体,则可以进行室内剖切区域的扫描。
(2)随后转为内业工作。在导出点云数据后,先手动对准各相邻测站之间的平面及立面,并去除里弄建筑中大量诸如空调机架、线缆等噪点数据;然后,根据不同的保护等级,采用抽稀的方式对此前划分的各区域块数据进行适当轻量化;再经过平面及竖向校核,组合形成整体地块的三维点云数据模型(图5),并据此进行测绘成果的转换。
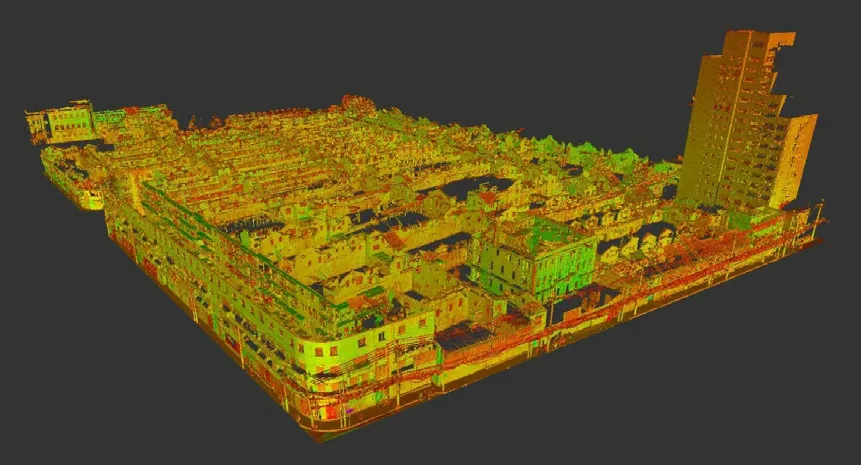
图5 里弄建筑地块整体三维点云模型
3.2 建筑平面测绘
街坊内的里弄建筑单体看似大同小异,但实际上,房型基本相同的同一排建筑外轮廓却有可能各不相同,有的会在建筑总宽度上逐步延展,有的则整个建筑呈一个不规则的梯形。在使用传统测距仪入户进行内部测绘时,往往会因为房型的类似而被误导,或者在后期绘图处理中将建筑轮廓简单的处理成一个矩形,使得测绘结果产生较大错误。
本案例中,通过在里弄建筑群的三维点云数据模型上进行水平剖切(图6),可以将每一栋建筑单体的轮廓准确无误地绘制出来,并形成区域建筑总平面布置图。随后现场测绘人员根据已经确定的建筑外围平面进行室内测量工作,可对单体建筑的总尺寸起到控制作用,大大提高了建筑平面测绘的准确性。该方法也同样适用于地块内一些带弧形或不规则的建筑体。

图6 三维点云模型平面剖切
3.3 建筑立面、剖面测绘
传统的既有建筑立面测绘中,通常使用全站仪单站测量建筑外轮廓及门窗洞口的轮廓点;但对于一些山墙顶部造型、装饰线、门窗样式等,只能参考照片进行粗略的仿绘,而这些元素大多正是里弄建筑的风貌特色所在。采用三维激光扫描技术,可成功从单点测量方式跨越到三维成像测绘方式,将各个立面从建筑单体点云模型中截取出来,调整坐标系;再导入CAD 中,结合现场照片进行现状精细描绘(图7)。对于甄别中要求的典型建筑剖面,也可以单独截取剖切段进行描绘,代替了以往参考平、立面进行推敲剖面绘制的方式,使得剖面图更加准确,还能够反应出老式里弄中的一些特色檐口部位,最终获得足以满足历保建筑测绘深度的街坊内各单体立面、剖面图。
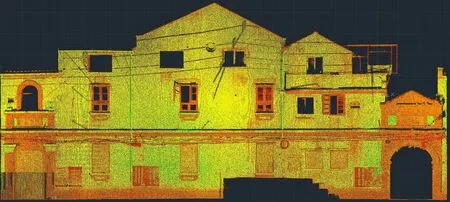
图7 立面点云导入CAD 描绘
3.4 特色门头、雕花细部测绘建模
特色门头、雕花细部是上海里弄建筑特色的重中之重,这对甄别中的测绘工作提出了更高的要求,其中存在两个核心技术难点:一是如何准确绘制这些复杂线条轮廓的平面图;二是门头线条存在大量的前后进伸关系及雕花的弧形曲面,在二维绘图成果中较难清晰表达。通过现场采集足够精度的三维点云数据,首先将这些门头及雕花1 ∶1 描绘出来;其次,将点云数据模型导入Geomagic 三维软件中,不断调整适配扫描精度的三角面片数量,经过曲面修补、网格优化、网格重构等操作,快速还原三维现状模型[4](图8),为后续重点部位的归档、保护、翻建甚至3D 打印提供技术支撑。
4 无人机倾斜摄影技术应用
4.1 现场航拍与数据处理
采用无人机进行测绘时,首先要根据任务的拟定目标调查是否为限飞区域,再对现场进行实地踏勘,测量统计测区范围内的建筑高度,重点关注周边的高层建筑单体或构筑物,尽量确定其准确高度。为提高测量精度,需提前在街坊周边的4 条马路上布置一定量的像控点,要求点位周围平坦,且点位清晰、易识别。本次航拍任务主要分以下两部分。
(1)街坊主体区域倾斜摄影:选定合适的精度、飞行高度及拍照间隔。由于街坊西北角和东南角均有超过100 m 的高层建筑,在规划飞行航线时,必须考虑飞行区域根据预设飞行高度发生的外扩(接近1 ∶1),因此需要缩小或调整航线进行必要的避让。此时,没有采集到数据的部位应更多考虑采用三维扫描数据来替代,航线双向重叠率均应保证在80%以上。
(2)建筑单体立面补充拍摄。在主体区域飞行摄影时,由于里弄建筑间距较窄,其廊道间所形成的照片数据会产生严重变形,此时需选择手动控制无人机对立面进行补充拍摄,以此来完善现场数据成果。随后转为内业工作,经过几何处理、平差等一系列复杂运算,生成一张连续的TIN三角网,把现场拍摄的所有高分辨率影像图附着到三角网上形成倾斜摄影模型;并通过软件对数据源进行提取及转换[5]。
4.2 复杂屋面测绘
上海里弄建筑的屋面有的为多坡屋面,上面不均匀地布置着大量老虎窗、烟囱、附属构件、搭建物等;即使是看似相同的同排建筑单体,屋面上的信息依旧有所不同。
传统测绘往往会使用测距仪去到每一个阁楼或斜屋顶里打标高、测坡度、定位老虎窗,再根据琐碎的平面测绘信息整合推导出大致的屋顶平面布置图,很容易发生遗漏信息的情况,使测绘成果的准确性大打折扣。
采用无人机倾斜摄影技术进行测绘,可通过ContextCapture 软件对无人机数据进行空三处理;如遇软件运算不稳定的情况,则可选择PhotoScan 软件进行尝试运算并导回成ContextCapture 软件支持的空三文件。随后,将数据成果转换为las 格式,导入三维扫描处理软件中生成三维点云模型(图9),可以直观地反映出屋面主要坡度及其上部的所有构件信息。最后导入CAD 中,将屋面上的全部建筑信息逐一描绘出来,并与已经完成的建筑单体平面、立面布置图进行关键尺寸的对齐调整,形成全面、准确的屋顶平面成果,达到传统测绘方式无法比拟的屋面测绘效果。

图9 里弄建筑群的屋面三维点云模型
4.3 三维数据模型融合互补
随着实景三维测绘在城市建筑信息网建设中的广泛应用,建筑三维模型已经成为历保建筑项目中必不可少的交付成果之一[6]。三维激光扫描可以准确地体现里弄建筑中的特色建筑立面、门头、雕花等,但由于环境条件与架站的局限性,建筑上部空间往往存在扫描盲区,导致三维点云模型上部存在空白。无人机倾斜摄影则截然相反,越是靠近上部的区域,数据采集的质量就会越好,而靠近下部的数据则会因为空间或树木遮挡等原因发生变形或缺失;虽然经过一些修模软件处理后会得到一定改善,但过多的介入可能会带来更大尺寸上的偏差。在此,将上述两种测绘成果以三维点云数据的形式进行拼接融合,且拼接过程中需要先重点删减无人机倾斜摄影成果中发生变形的立面部分,最终形成完整可靠的三维实景模型(图10)。

图10 三维扫描与无人机数据融合模型
5 结语
相较于传统测绘,三维测绘技术具有高精度、高效率的测量优势。本文以实际项目为例,根据老式里弄建筑的特点,对标传统测绘方法,详细介绍三维激光扫描和无人机倾斜摄影两种实景三维测绘技术在上海里弄建筑甄别测绘中的工作流程及方法;通过解决一系列技术难题,形成全面、高效、准确的测绘成果及三维数字模型,为今后类似的项目提供方法借鉴。
猜你喜欢
——以柏林Kreuzberg 地区为例
建筑技艺(2020年8期)2020-09-17 03:17:44
浙江国土资源(2019年10期)2019-10-31 03:17:00
科学导报·学术(2019年51期)2019-09-10 02:43:52
建材发展导向(2019年10期)2019-08-24 06:25:28
——上海里弄居住功能更新方式探索
同济大学学报(社会科学版)(2018年3期)2018-11-13 11:10:38
同济大学学报(社会科学)(2018年3期)2018-10-20 11:06:50
神州·中旬刊(2018年6期)2018-06-27 16:20:22
住宅科技(2018年4期)2018-06-09 03:46:42
中国公共安全(2017年7期)2017-10-13 08:18:11
电子制作(2017年9期)2017-04-17 03:01:00