
管内蛇形机器人设计及变形检测研究
2022-12-25 12:22张佳伟
重庆理工大学学报(自然科学) 2022年11期
张佳伟,赵 弘
(中国石油大学(北京) 机械与储运工程学院, 北京 102200)
0 引言
液态能源主要利用铁磁性材料管道进行长距离输送,因其老化、腐蚀等原因造成的变形极易导致事故发生,造成经济损失及环境污染,需定期进行检测和维修。漏磁检测技术广泛应用于管道变形检测工程,利用磁敏传感器对漏磁场进行检测,获得其位置、类型、变形程度等精确信息。管道内漏磁检测器通常采用轴向和周向磁化的方式使管道检测达到全覆盖,采集轴向和径向磁通泄漏信号,利用信号畸变补偿准确确定变形边缘特征[1-2]。
基于漏磁检测原理设计了管内变形检测机器人,主要包括探究漏磁机理和磁化机理、机器人整体结构设计、变形检测及不同变形种类规律探究。基于漏磁检测设计一款管内变形检测仿蛇形机器人,利用三维软件构造机械结构并进行可行性分析;用Maxwell对不同变形种类进行管道磁化模拟仿真并对结果进行规律分析。管内变形检测机器人基于DN100管道进行设计,针对管道变形及不同变形种类探究实现对管内变形检测的仿真研究。
1 主要研究内容及目标
1.1 管道漏磁内检测基本模型
漏磁检测法是目前应用范围最广、检测效果最好的管道检测技术。基本原理是:铁磁性材料在外加磁场的作用下被磁化,若材料中无缺陷,大部分磁力线会通过铁磁性材料内部;若铁磁性材料存在缺陷,由于缺陷部位磁导率远小于铁磁性材料本身,导致缺陷处磁阻增大,使得该区域磁场发生畸变,部分磁力线泄露出材料表面,在缺陷处形成漏磁场。通过磁敏元件对漏磁场进行检测,可获得相应的电信号,对电信号进行处理,可以得知缺陷的特征状况[3]。
管道漏磁内检测器如图1所示,磁敏元件置于管壁表面,永磁体对管壁磁化,管道内壁无变形时没有磁力线泄漏。管道内壁存在变形时,部分磁力线会直接泄漏到管壁内表面,检测器检测到磁感应强度变化,从而进行变形检测和识别[4]。

图1 管道内检测器示意图
1.2 管道机器人技术现状
目前管道机器人仍处于发展阶段,市面上用于管道检测工作的机器人行走方式多样,且大多是针对单一管道直径进行检测的,适应管道能力还不完善;同时,基于无损检测技术下的管内变形检测机器人设计也很多,如漏磁检测技术、超声波检测技术、涡流或射线检测技术等;此设计旨在对不同管径进行变形检测;设计伸缩支撑结构与动力伸缩结构使得面对颠簸可以平稳通过;通过对磁化后管道内磁感应强度变化进行分析研究变形处特征[5-7]。
1.3 基本流程
1) 管内蛇形变形检测机器人设计
① 基于国内外管内检测研究现状设计模型;② 设计漏磁检测单元以检测变形;③ 机器人的结构校核。
2) 永磁铁磁化机理和仿真模型建立
① 探究漏磁场与变形检测关系;② 研究永磁铁磁化管道后某一点处磁感应强度大小关系式。
3) 磁场仿真及变形预测
① 基于Maxwell 建立模型,进行磁化仿真;② 进行模拟实验,记录管内磁场强度变化;③ 验证变形处仿真数据与变形种类是否对应;④探究仿真参数与管内变形特征之间的关系。
2 管内蛇形变形检测机器人的设计
2.1 设计要求
管内检测机器人运行速度一般在0.5~5 m/s,由于要实现的功能不同,运行速度也不相同;针对基于漏磁检测原理的管内变形检测机器人,其运行速度应控制在0.5 m/s;管内检测机器人设计基于材质为X52钢的DN100(内径102 mm,外径118 mm)高强度钢管;自适应管径范围为(100±20)mm;可通过变形障碍范围为R/10;机器人主体所受最大牵引力为300 N。要求机器人可以利用电机驱动履带机构实现在管道中自由移动;在移动过程中,利用连杆支撑结构和伸缩履带结构实现运行平稳和变径工作;同时基于无损检测技术,利用霍尔元件检测管道变形处的漏磁场磁感应强度大小;针对实际工况对关节处进行通过性分析,设计一款管内蛇形变形检测机器人[8],图2为机器人设计总体流程图。
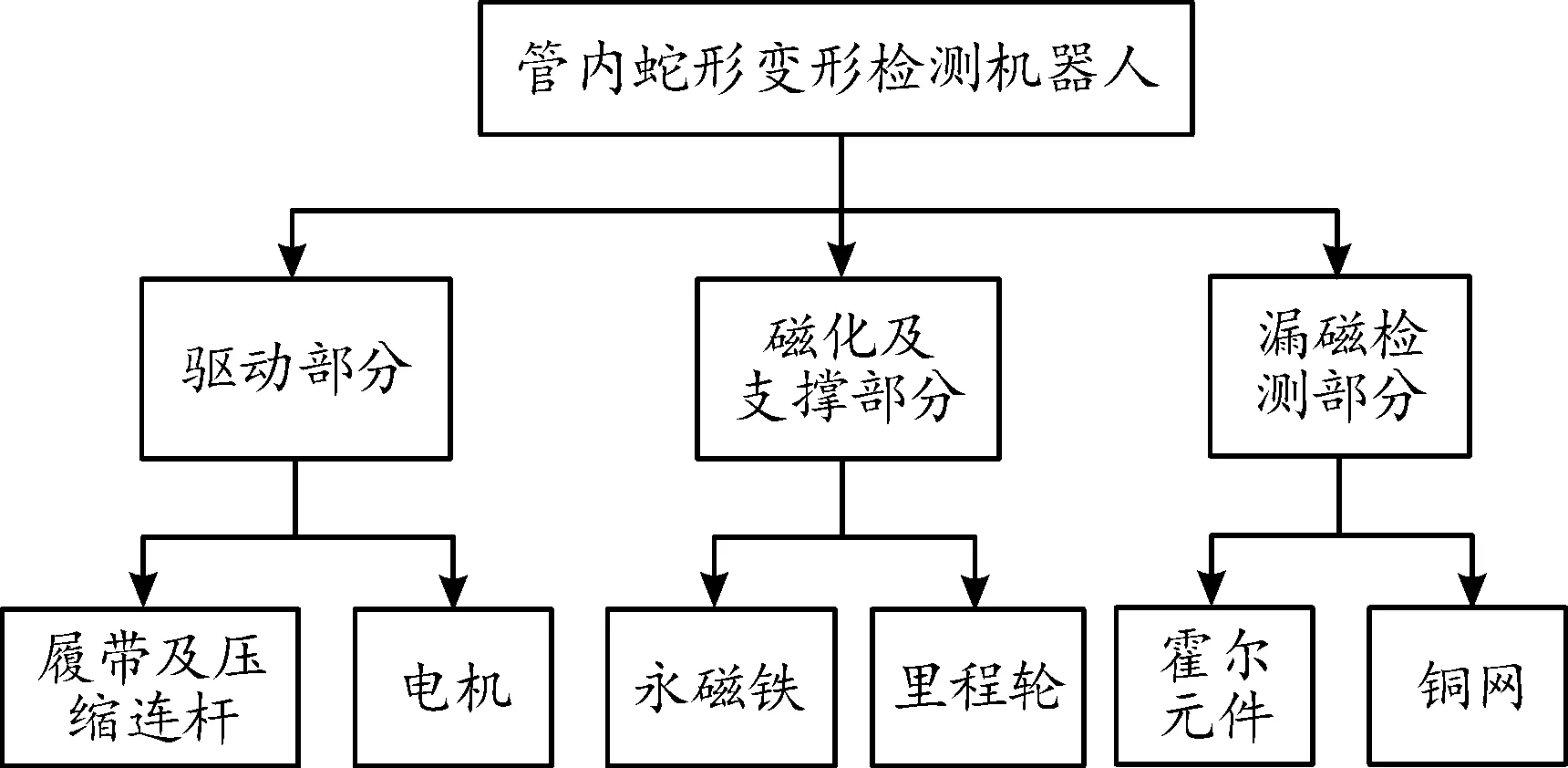
图2 机器人设计流程框图
2.2 驱动部分设计
管道机器人有多种运动方式,如常规柔性蠕动式、多足式、轮式、蛇形、履带式等;相对于其他驱动方式,履带驱动搭配平行连杆机构的方式,具有变径范围大、运动稳定、空间布局合理等优点。利用连杆支撑的3个独立履带驱动模块作为动力来源,根据管道的轴对称性和三角形的稳定性等特点,配合移动弹簧和可压缩支撑杆以适应不同的管径及不同的行走姿态;采用三轴里程轮结构用以记录信息并自动适应管径变化、提高越障能力。如图3、4为驱动部分结构示意与支撑结构示意图。

1.行走履带;2.动力电机;3.连接角铝;4.基管;5.连杆机构;6.压缩弹簧

图4 里程轮搭配连杆支撑结构示意图
2.3 漏磁检测部分设计
如图5所示,霍尔元件是利用霍尔效应制成的传感器,其分辨能力强、精度高且检测速度快,将其均匀分布测量管道内壁漏磁场变化并进行信息收集;为避免磁化部分的永磁体对其检测产生影响,在霍尔元件左右两侧添加2 mm的铜网起屏蔽作用。图5所示为里程轮单元搭配永磁体模块在基管上构成漏磁检测模块。
2.4 总体结构确定
管内检测机器人为仿生蛇形结构,基管为铝棒,相互之间由球形万向节进行连接,机构两端为动力模块,安装独立履带驱动模块;中间载有支撑模块、里程轮系统以及永磁体模块和霍尔元件检测系统;设计了履带提供动力搭配压缩弹簧式连杆的支撑结构,实现不同管径下的变形检测以及周向轴向检测,使得变形检测工作在平稳状态下完成。在整个机器人的作业过程中,关节处需要适应不同管径,在拐弯处会受到最大扭矩与管壁的反作用力,所以对球形万向节处要求一定的强度和刚度,模拟实际工作时所受到的负载并进行静力学仿真是必要的。

1.里程轮系统;2.伸缩支撑结构;3.霍尔元件;4.永磁铁模块;5.球形万向节;6.主体支撑基管;7.铜网
图6为管内蛇形变形检测机器人总体三维结构,漏磁检测单元仅在右边部分进行显示,机器人两端为驱动部分,保证充足的动力来源;可以根据管道长度、管道周围环境和实际工作需要选择机器人节数;附带两张静力学仿真结构云图,在其拐弯关节位置施加300 N(设计要求下机器人所受最大牵引力)的作用力,同时设定万向节传递到另一端的扭矩大小为231 N/mm(基于最大牵引力和基体长度计算出扭矩大小),应力云图显示其大部分表现良好,连接处刚度满足工作强度要求;通过应力分析得到所受应力较大的区域,进而可以进行结构优化,使连接处性能更好,能更好地完成管道作业。
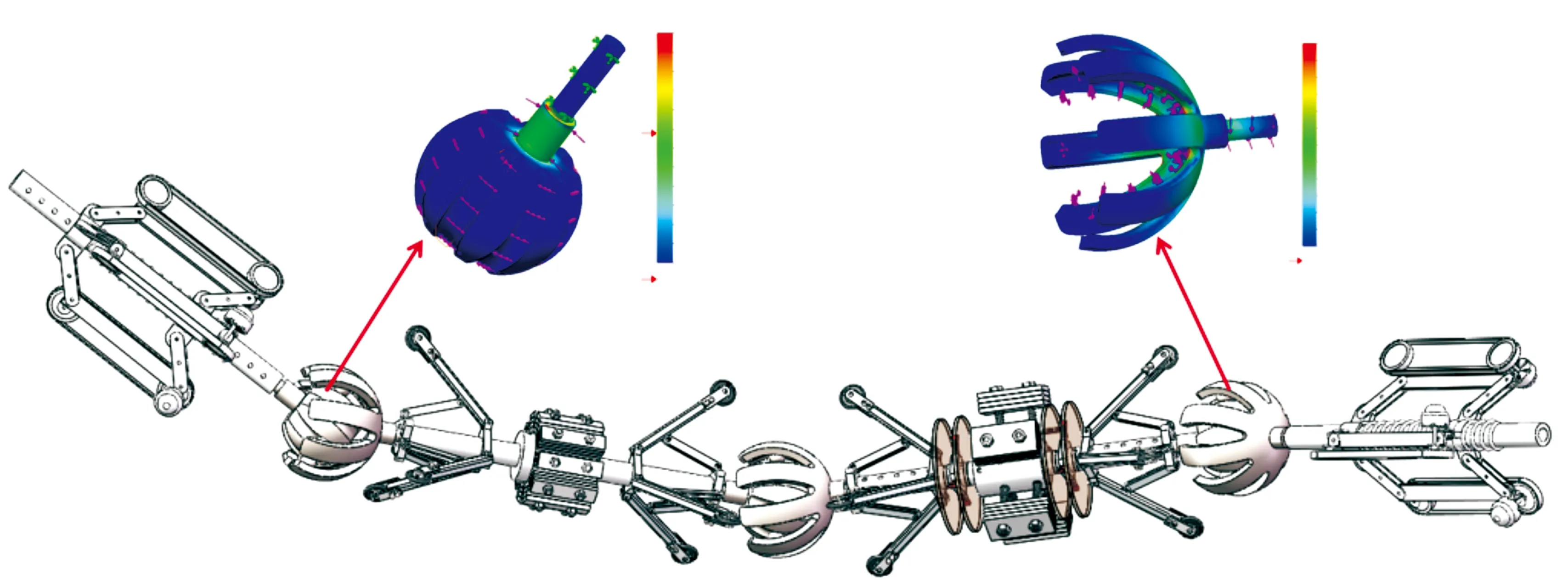
图6 蛇形机器人机构示意图
设计结果表明:该机器人具有较好的管内变形检测效果和良好的管径适应能力,可顺利通过水平、垂直、弯头及变径管段,亦可以搭载各种检测模块对工业管道进行检测[9-11]。
3 可行性分析与管道磁化模型建立
3.1 可通过性要求
《GB 50253—2014输油管道工程设计规范》规定,管道的曲率半径应满足钢管强度要求,且不宜小于钢管外直径的1 000倍。竖向下凹的弹性弯曲管段,其曲率半径应大于管道在自重条件下产生的挠度曲线的曲率半径,其曲率半径按下式计算:
(1)
式中:R为管道弹性弯曲曲率半径(m);D为管道的外径(cm);α为管道的转角(°)。
因此,管道弯管处最小弯管半径为18D即为18×118 mm=2 124 mm。设计时可通过的弯管半径应小于该值并留有足够的裕量,使得装置在存在部分失效的情况下可以继续进行工作,不至于卡在管道中造成堵塞[12]。
3.2 管道磁化模型建立
永磁材料是现代科学的一种重要的基础材料,广泛应用在生产生活的各个领域,利用永磁材料进行漏磁检测方便快捷。
一般磁铁的磁力线分布是闭合的,如条形磁铁以及蹄形磁铁,都是由N 极出发S极返回;图7所示为2种典型磁力线特征。针对磁力线的这一特征,变形处磁力线会穿过变形表面,当机器人携带永磁铁行走到管道变形处时,会检测到在此处形成的漏磁场,对此时的磁感应强度大小进行分析可以得到变形处的特征。

图7 磁力线特征
图8中小标1的情况表示在管壁内无变形存在时,在2块永磁铁作用下,管道内的磁力线情况;小标2的情况表示在管道中存在向上凸起的变形时,管道内的磁力线情况;小标3的情况表示在管道中存在下凹变形情况时管道内磁力线的分布情况。此原理与管内检测漏磁磁感应强度一致,基于此设计了搭载霍尔元件的漏磁检测单元,研究变形处的变形特征。
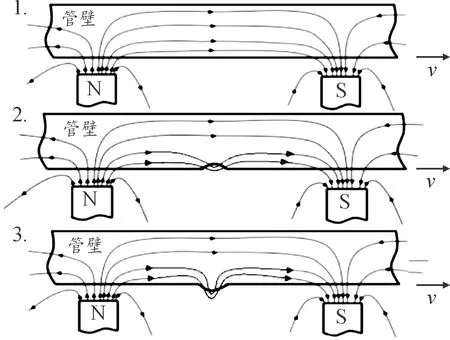
图8 不同种类变形下管道处磁力线变化
基于电磁场的基本理论和麦克斯韦基本方程组,针对这方面研究普遍采用标量磁位方法或向量磁位方法,即分别用磁荷或束缚电流来描述磁场中的磁介质[12]。可知a*b*c的永磁铁在空间一点P(x,y,z)的磁场已知,则该永磁铁其三维磁场分布解析式为[12]:

Γ(a-x,y,z)+Γ(x,b-y,z)+
Γ(x,y,z)]
(2)
Γ(b-y,x,z)+Γ(y,a-x,z)+
Γ(y,x,z)]
(3)
Hz=k[-ψ(b-y,a-x,z)-ψ(y,a-x,z)-
ψ(a-x,b-y,z)-ψ(x,b-y,z)-
ψ(b-y,x,z)-ψ(y,x,z)-
ψ(a-x,y,z)-ψ(x,y,z)]
(4)

(5)
4 管道磁化仿真
4.1 MAXWELL磁场仿真
为研究管道磁场变化及变形处漏磁情况,需要将理论与模型实际情况结合起来,所以采用仿真软件进行模拟仿真。常用的电磁场仿真软件有很多,针对仿真结果和参数处理优化情况,使用Maxwell进行仿真,图9为进行模拟仿真的基本步骤[13-15]。
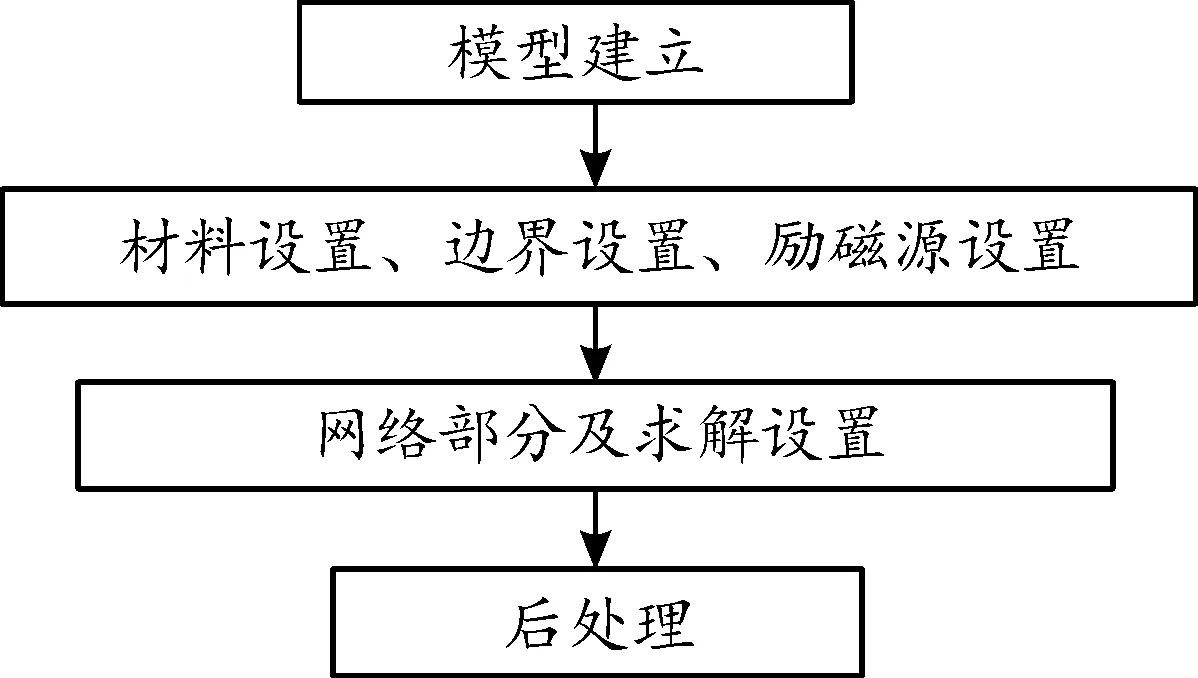
图9 仿真流程框图
4.2 管道磁化仿真
管道变形种类很多,变形是指管道结构受到损伤,进而影响管道的结构、刚度和使用寿命,有焊缝、变形、错口、脱节、开裂等变形[16]。
上文提到选用永磁铁材料对管道进行磁化,永磁铁一旦制成后不需要经常进行激励,其磁通稳定性好且利于信号获取。软件中设置其为钕铁硼材料,尺寸为30 mm×10 mm×3 mm,磁场方向为与缺陷位置垂直方向;如下图所示为X52钢的磁滞曲线,从曲线中可以得到,当外加磁场强度达到100 A/m时,其磁感应强度达到2T左右且达到磁饱和,此时永磁铁磁场强度满足磁饱和要求。图10所示为无缺陷时,永磁体对管道进行磁化时磁感应强度的变化规律,在管道200 mm处时,磁感应强度大小开始变化,且在300 mm处已经达到2.5T左右,达到此时情况所需时间约为0.2 s,而缺陷处距离检测单元远大于磁饱和所用时间走过的距离,由此可知,永磁铁完全磁化管道所用的时间小于机器人变形检测单元走到缺陷处所需运动时间,满足变形检测要求。

图10 X52钢B-H曲线
在此针对典型变形进行了研究。首先对正常管道在永磁铁作用下其磁场强度云图和数据变化进行了模拟,如图11、12所示:

图11 永磁铁作用下管道磁场强度变化云图

图12 永磁铁作用下管道磁场强度变化
接着模拟永磁铁作用下管道中存在凹陷变形与凸起变形2种典型变形情况下磁场强度的变化。
图13—16表示内凹变形与外凸变形2种情况下的仿真结果图,分析其结果及磁场强度变化曲线基本可以得出结果:在变形处磁力线会穿过且在变形处形成漏磁场,不同的变形种类导致磁场强度的变化幅度与距离不同;从磁场强度变化图中可以看出,在变形处峰值变化并出现波动,由此可知此处管道存在变形。

图13 管道内凹变形磁场强度变化云图

图14 管道内凹变形轴向磁场强度变化曲线

图15 管道外凸变形磁场强度变化云图

图16 管道外凸变形轴向磁场强度变化曲线
永磁铁磁化管道之后,其典型变形处磁感应强度会发生变化,并且不同的变形种类其磁场强度变化宽度不同;接下来探究不同宽度变形处其磁感应强度变化规律,从图17、18及表1、2中可以看出,当变形深度为5 mm但宽度为5~17 mm时,每次间隔变化时,磁感应强度变化规律如图所示:当为管道内壁凸圆孔变形时,轴向漏磁场分量信号宽度与变形半径之间的关系可以表征为y=2.2x-0.6,即半径每增加1 mm,轴向漏磁场分量信号宽度增加2.2 mm;当管道内壁为凹圆孔变形时,磁感应强度大小变化和变形深度之间的关系可以表征为y=-0.26x2+2.39x+8.92,即深度每增加1 mm,轴向漏磁场分量信号如函数变化。

图17 不同变形宽度轴向磁感应强度变化曲线
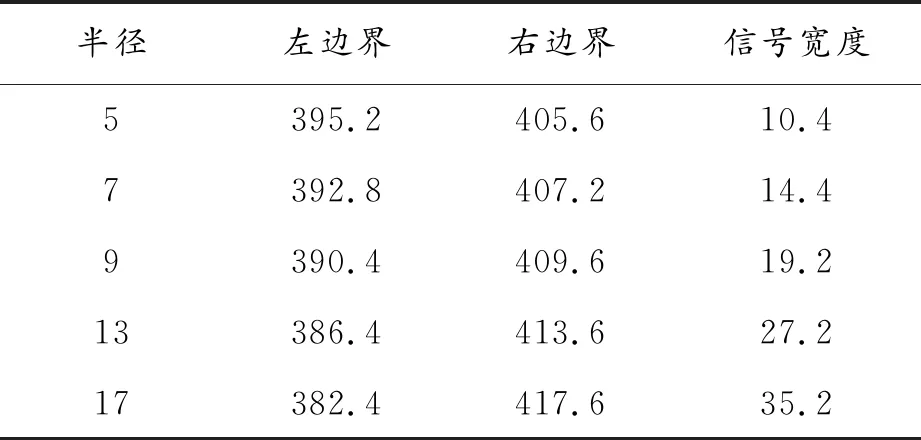
表1 不同变形宽度轴向磁感应强度数值 mm

图18 不同变形深度轴向磁感应强度变化曲线

表2 不同变形深度轴向磁感应强度数值
4.3 管道变形情况预测
分析完典型变形之后,针对不同变形下磁场强度变化是否与变形长度和轴向宽度有关进行研究。管道为DN100管道,选取长度为800 mm,在管道200、400、600 mm处分别施加椭圆形变形缺陷,观察在变形位置处磁感应强度大小的变化规律。
图19表示在轴向上不同凸起高度变形下的磁感应强度变化对比。信号高度分别为5、10、15 mm,输出结果在轴向距离上进行了绘制比对,结果表明:在变形位置处,同样出现峰值变化且峰值变化幅度与变形特征相对应;从磁场强度变化图可知:变形处宽度越大,磁场强度变化越慢,当磁场强度变化峰值一定时,变形宽度越大则磁感应强度变化幅度越小。记录图中数据可知,变形信号宽度分别为12、20.7、29.6 mm,由此根据对应函数算出对应变形宽度分别为5.73、9.68、13.72 mm,计算可知相对误差约为8.7%。
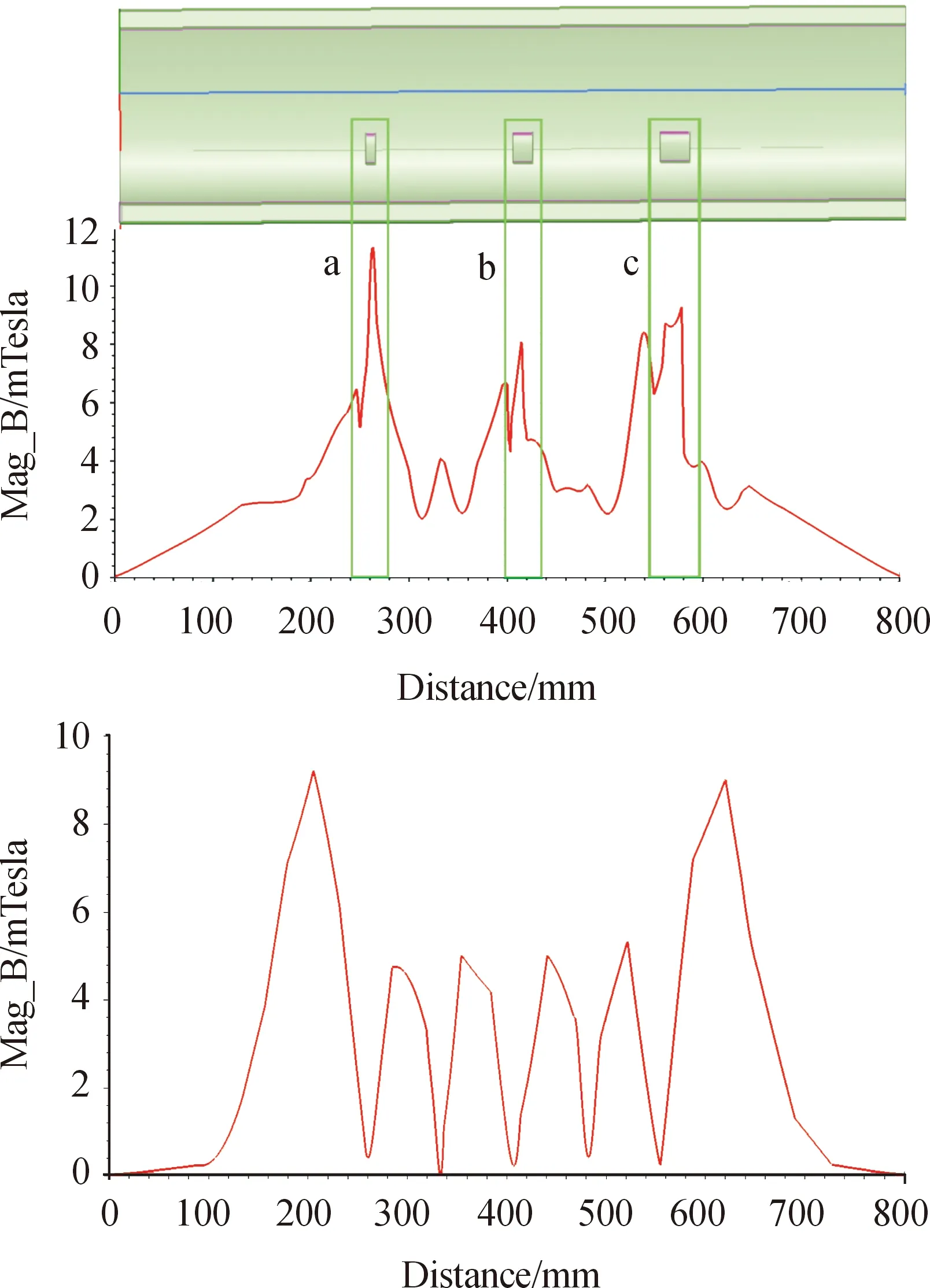
图19 管道内不同宽度变形磁场强度变化对应图
图20所示为不同深度内凹变形情况下磁感应强度变化比较,信号深度分别为5、7、9 mm,从图中可以看出,变形深度越小时磁感应强度变化越快且幅度越大,随着深度逐渐增大,磁感应强度变化幅度和大小也变大,且变形最深处,幅值最大。记录图中数据可知,变形信号高度分别为14.4、13.5、10.9 T,根据对应公式计算出其对应变形深度分别为4.6、6.46、8.28 mm,计算可知相对误差约为8%。
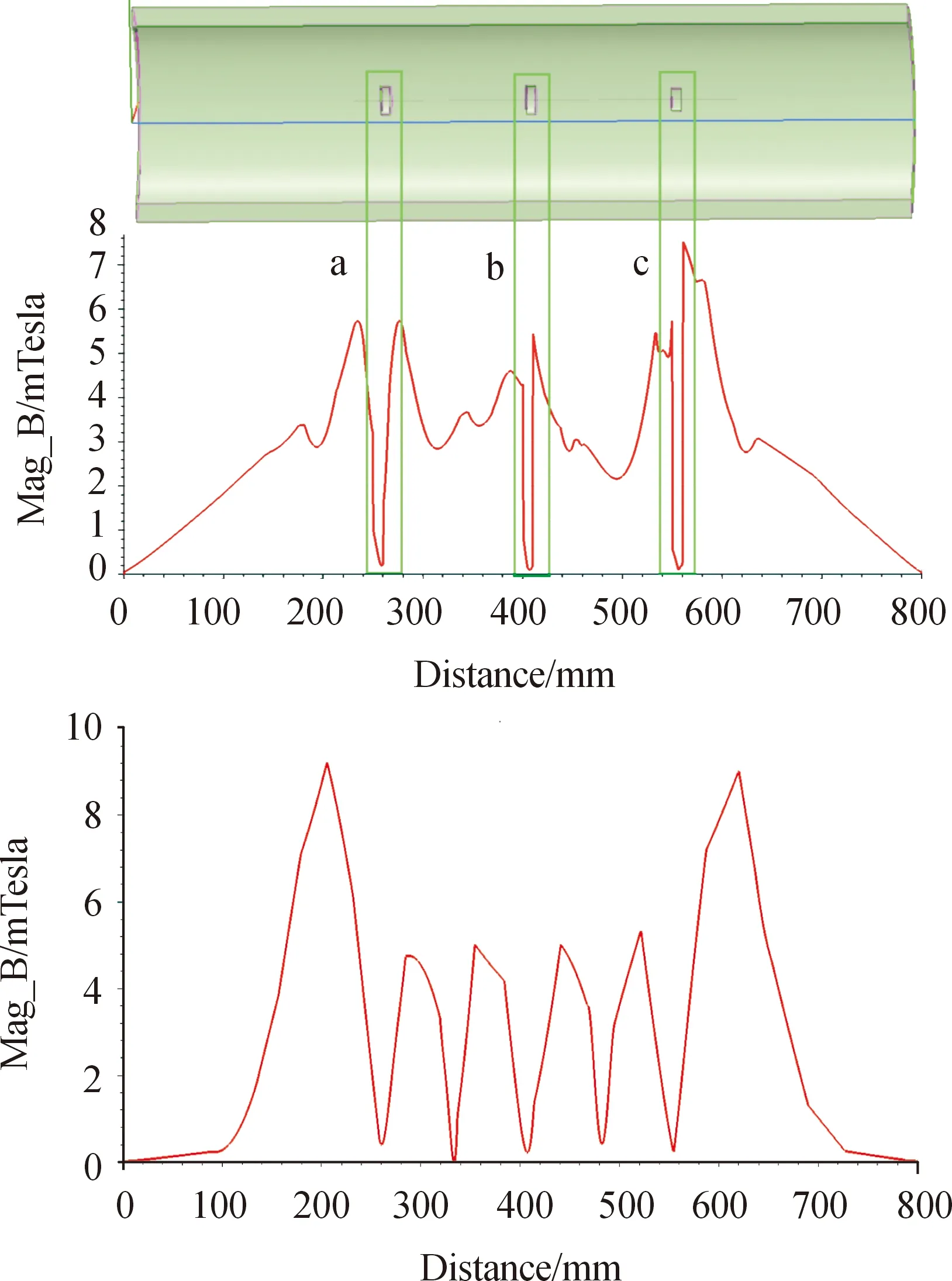
图20 管道内不同长度变形磁场强度变化对应曲线
从以上分析中可以得出:不同变形特征下,磁感应强度变化轴向距离、幅度和幅值大小均不同,不同的变形特征有对应的磁感应强度变化特点;霍尔元件检测到磁感应强度变化后并收集信息,针对不同变形信息进行分类对比,可以预测管道中实际变形特征。
5 结论
1) 设计出一种基于漏磁检测原理的管内变形蛇形检测机器人并验证设计的可行性;通过理论分析建立管道仿真模型,结合仿真结果得到管道在不同变形特征下磁场强度的变化规律,可以对管内变形特征实现归类识别。
2) 基于漏磁检测原理进行管内变形检测,符合无损检测理念,对变形处磁化仿真结果进行研究有利于特征识别,此举可实现对在役管道进行高效率变形检测,减少经济投入和人工投入,更好地完成管道的维护工作。
3) 此设计可结合神经网络遗传算法进行变形种类归类,经过训练之后对变形特征更加敏感精确,对管道变形检测工作具有一定现实意义。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
传感器世界(2022年6期)2022-11-25
微特电机(2022年9期)2022-10-15
电力系统自动化(2022年15期)2022-08-09
钢管(2021年1期)2021-04-26
商品与质量(2019年47期)2019-06-18
农业科技与装备(2017年4期)2017-08-17
科技资讯(2017年3期)2017-03-25
物理教学探讨(2014年7期)2015-01-12
企业技术开发·中旬刊(2009年4期)2009-01-12
