
基于新型SMO的PMSM无传感器控制*
2022-12-21 09:46林巨广李晶晶
组合机床与自动化加工技术 2022年12期
林巨广,王 涛,李晶晶
(合肥工业大学机械工程学院,合肥 230009)
0 引言
随着碳中和的概念应用的愈加深入,电动汽车成为目前汽车发展的一个重要方向。永磁同步电机(permanent magnet synchronous motors,PMSM)具有效率高、体积小、噪声小、过载能力好和功率因素高等突出优点,广泛应用于新能源电动车。为实现永磁同步电机的精准控制,需要精确获取电机的转速以及转子位置,但是汽车行驶的工况复杂,机械传感器容易受到外界干扰,安装维护困难,故无位置传感器控制逐渐受到关注。该方法不需要机械传感器,采用软件算法来在线估计电机转子的位置,从而实现电机的精准控制。
滑模观测器是一种非线性控制方法,由于滑模动态可设计,且与被控参数和外部扰动关系不大,使滑模控制系统具有良好的鲁棒性和较高的控制精度,因而滑模控制技术得到了广泛的关注和研究。但是滑模观测器在趋近滑模面时使用开关函数,所以滑模系统存在高频抖振问题。QIAO等[1]采用混合非奇异终端滑模面,有效降低了滑模控制器存在的抖振问题。丁立等[2]采用Type-Ⅱ型跟踪环路对SMO估计的角位置以及速度信息跟踪,观测转子的角位置和转速更为精准。苏健勇等[3]提出以电流和磁链为观测对象的扩展滑模观测器,结果较传统滑模观测器更为平滑,但是算法较为复杂。ZHAO等[4]采用在线参数识别配合二阶滑模观测器,减小了的传统滑模观测器的抖振现象。史婷娜等[5]提出一种改进型的线反电势滑模观测器,引入双曲正切函数,减少系统抖振,但是不能保证更高转速的观测精度。
基于以上研究,本文提出一种基于新型复合指数函数的滑模观测器,能够有效削弱传统滑模观测器的开关函数在接近滑模面频繁切换造成高频抖振现象。同时使用锁相环代替反正切函数以及相位补偿,以更精准估算电机转速和转子位置。
1 永磁同步电机传统滑模观测器
1.1 建立永磁同步电机数学模型
建立d-q轴坐标下的数学模型:
(1)
用反Park变换重写α-β轴电压方程:
(2)

(3)
由式(3)可知,扩展反电动势与id、iq的微分相关,故只要准确得到扩展反电动势EMF就能获得需要的电机转子转速以及位置信息[6]。当电机为表贴式电机时,式(3)可简化为:
(4)
将式(2)改写为iα、iβ的微分公式:
(5)

1.2 搭建传统滑模观测器
根据式(4),设计滑模观测器为:
(6)

将式(5)~式(6)得到:
(7)
设计滑模控制率为:
(8)

定义滑模面函数为:
(9)
当观测器状态变量达到滑模面s=0时,根据式(6),此时控制量可以看作等效控制量,即:
(10)

(11)
式中,ωc为低通滤波器截止频率。特别的,对于表贴式永磁同步电机(Ld=Lq),由式(3)和式(11)得:
(12)

(13)
综上所述,传统滑模观测器算法实现原理如图1所示。

图1 传统滑模观测器
2 新型滑模观测器
2.1 分段复合函数设计
由于传统滑模观测器的开关函数作用,导致信号在穿越滑模面时抖动过大,为此设计一种分段复合函数,使得信号在切换滑模面时更加柔和,可有效削弱抖振。本文基于此设计了一种新型分段复合函数:
(14)
式中,a为边界层厚度(a>0);x为系统状态量误差,即电流观测值与实际值的误差。

图2 新型复合函数
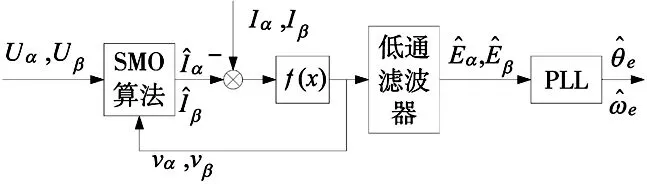
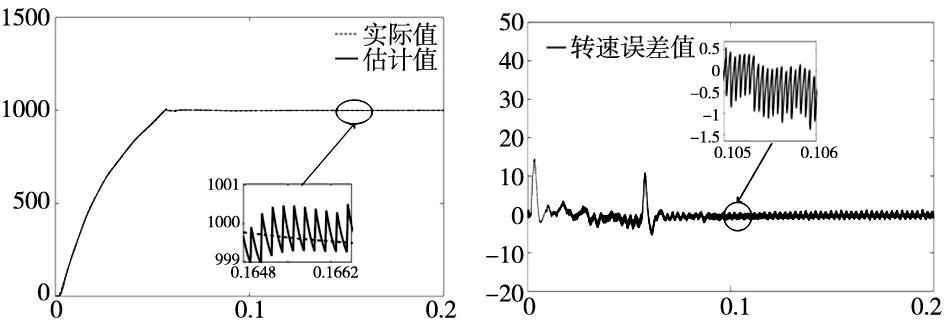
该函数的特性曲线如图2所示,可以看出,在边界层内部时,即|x| 根据式(8),设计新型滑模控制率为: (15) 式中,f(x)为分段复合函数。 根据式(10)得到此时反电动势估计值为: (16) (17) 由式(7)可得: (18) (19) 由于逆变器的作用,系统中会存在大量谐波,且基于反正切函数的转子位置估计方法会将抖振带入除法计算,从而导致高频抖振误差被放大,以致估测的位置及转速结果不准确。本文采用锁相环来提取滑模观测器估测的反电动势中的位置信息,保证位置及转速信息的准确性[10-11]。 锁相环结构框图如图3所示,其由鉴相器,环路滤波器和反馈调节器组成。 图3 锁相环结构图 (20) 根据图3可得: (21) (22) 此时,新型滑模观测器等效框图可简化为图4所示结构。 图4 锁相环等效框图 为验证基于新型滑模观测器的估算精度,利用MATLAB/Simulink搭建如图5所示的三相永磁同步电机无传感器控制系统仿真模型进行验证。该模型基于(id=0)的矢量控制策略,实现PMSM的电流双闭环、转速单闭环矢量控制。图中SMO封装模块为滑模观测器,通过坐标变换在静止坐标系构建SMO,实现对PMSM的转速及转子位置观测。 图5 PMSM控制结构框图 图中,电机仿真参数为:磁极数pn=4,电感Ld=Lq=0.35 mH,转子惯量J=0.008 kgm2,阻尼系数B=0.000 1。永磁磁链ψf=0.05 Wb,定子电阻R=0.006 Ω。 本节主要对基于分段型复合函数的新型SMO和传统SMO进行结果分析对比,验证所设计的新型SMO具有更好的效果。给定电机的起始转速为1000 r/min,设定的仿真时间为0.2 s,PMSM在空载状态下运转,实验结果如图6~图16所示。 (1)电机转速波形分析。图6为基于传统SMO的转速估计值与实际值的变化曲线,图7为基于传统SMO的转速误差值。 x图6 传统SMO的转速实际值与估计值 图7 传统SMO转速误差值 通过对比图6和图7分析可知,传统滑模观测器估计转子的转速估计值波动较大,转速估算值在994~1004 r/min内波动,误差较大,达到5 r/min左右,估算精度较低,且前期波动较大。 图8为基于新型SMO的转速估计值与实际值的变化曲线,图9为基于新型SMO的转速误差值。 图8 新型SMO的转速实际值与估计值 图9 新型SMO转速误差值 通过图8和图9可以分析得到,基于新型复合函数的滑模观测器能够很好估计出转子的转速,转速实际值曲线平稳,进入稳定阶段的转速估计值在999~1001 r/min内波动,且误差仅为0.5 r/min左右。 图10为新型SMO与传统SMO转速估计值对比。 图10 新型SMO与传统SMO转速估计值对比 通过分析可知基于新型复合函数的滑模观测器较传统滑模观测器能更快达到稳定,新型滑模观测器波动较传统滑模观测器更小,波形更加平滑,误差小于传统滑模观测器。 (2)转子位置角波形及分析。图11为传统SMO的转子位置观测波形,图12为传统SMO转子位置误差值。 图11 传统SMO转子位置实际值与估计值 图12 传统SMO转子位置误差值 由图11及图12可以看出在启动阶段,转子位置估计值抖动明显,且估计误差值较大,观测误差在0.25 rad左右且存在明显抖动现象,不能很好的反应转子的实际位置,估算精度不高。 图13为新型SMO的转子位置观测波形,图14为新型SMO转子位置误差值。 图13 新型SMO转子位置实际值与估计值 图14 新型SMO转子位置误差值 通过分析图13和图14得,新型SMO在启动阶段无较大波动,估计误差值仅为0.08 rad左右,较传统SMO估计误差值明显缩小,且无较大抖动现象,估算精度较传统SMO有所提升。 (3)存在参数摄动情况下的图形分析。图15为在0.1 s突增负载时新型SMO转速估计值,图16为突增负载时转子位置估计误差值。 图15 增加负载转速变化 图16 增加负载转子位置误差 在0.1 s时,将负载突然增加至10 N·m,由图15及图16可以看出给定转速为1000 rpm时,增加负载之后,转速在短暂下降后然后迅速恢复进入稳定阶段;转子位置估计误差值也在短暂的下降之后,快速恢复稳定。 针对传统滑模观测器的抖振问题,本文提出了一种利用分段复合型函数代替符号函数的新型滑模观测器,以提高估算精度。通过Lyapunov稳定性判据对基于新型滑模观测器的控制系统进行稳定判断,并搭建PMSM无传感器控制系统仿真实验。经过实验验证,在给定1000 rpm条件下,所提出的基于分段复合指数函数的新型滑模观测器估计精度在0.5 rpm左右,而传统滑模观测器估算精度在5 rpm左右且波动较大;在估计转子位置时新型滑模观测器估计精度在0.1 rad以下,而传统滑模观测器在0.25 rad左右。 综上所述,得到的结论如下: (1)本文引入的复合指数函数可以有效的降低因开关函数频繁切换带来的高频抖振现象。 (2)新型滑模观测器较传统滑模观测器在估计转速和转子位置时具有更高的精度,对高频抖振抑制效果明显。 (3)当参数摄动时,新型SMO对电机转速和转子位置的估算值能够较快恢复稳定,可以得出新型滑模观测器对外部干扰仍有较强的鲁棒性。2.2 基于分段复合函数的新型滑模观测器
2.3 根据Lyapunov定理判断滑模观测器稳定性

2.4 位置及转速估计



3 基于新型SMO的PMSM无传感器控制仿真实验验证






4 结论
猜你喜欢
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
中学生数理化·高一版(2019年12期)2019-12-31
中国惯性技术学报(2019年6期)2019-03-04
中国钢铁业(2018年6期)2018-07-26
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
铁道科学与工程学报(2015年5期)2015-12-24
