
无人水面艇动力与补能技术的现状及发展趋势
2022-12-17 12:32:12郭凌崧蒋旭东杨长云
小型内燃机与车辆技术 2022年5期
郭凌崧 蒋旭东 杨长云
(1-天津内燃机研究所(天津摩托车技术中心)天津 300072 2-应急管理部上海消防研究所 3-浙江鑫可机车科技有限公司)
引言
无人水面艇是一种可通过自主航行或者半自主方式在水面正常航行、并通过搭载各种任务载荷执行指定任务及作业的水面小艇(Unmanned Surface Vehicle,USV)[1],属于自主船舶中体型较小的一种,具有响应快、成本低、巡航范围大、持续时间长、安全性好、生存力强等优点。
从历史上第一艘完整意义的无人水面艇诞生至今已有70 多年历史,这其中,无人水面艇的发展几经起落。随着卫星定位导航技术、自动化控制技术、新型材料技术、先进造船技术等方面,特别是人工智能技术的高速发展,无人水面艇的发展进入了崭新阶段,使用范围已经从军事用途逐步扩展至民用领域,如海上货运与补给、近岸浅水区域测绘、复杂水域航行、海洋环境监测、海上救助、海区巡航等。
随着相关技术的发展和船舶智能化、无人化发展趋势的影响以及无人艇自主控制能力的不断提升和平台支持能力的不断提高,将会有越来越多的重复性强、危险性大、敏感性高、环境恶劣等不适宜由人员直接完成的任务交由水面无人艇完成,因此其发展潜力巨大。
1 国内外无人水面艇概况
国外无人水面艇发展较早,美国、欧洲、以色列等在该领域的技术发展与产品性能已趋成熟,艇型、任务呈多样化趋势。从产品种类与用途来看,目前已知的在研与已投入使用的无人水面艇中,70%以上为军事和准军事用途。世界主要现役无人水面船艇简况如表1 所示。
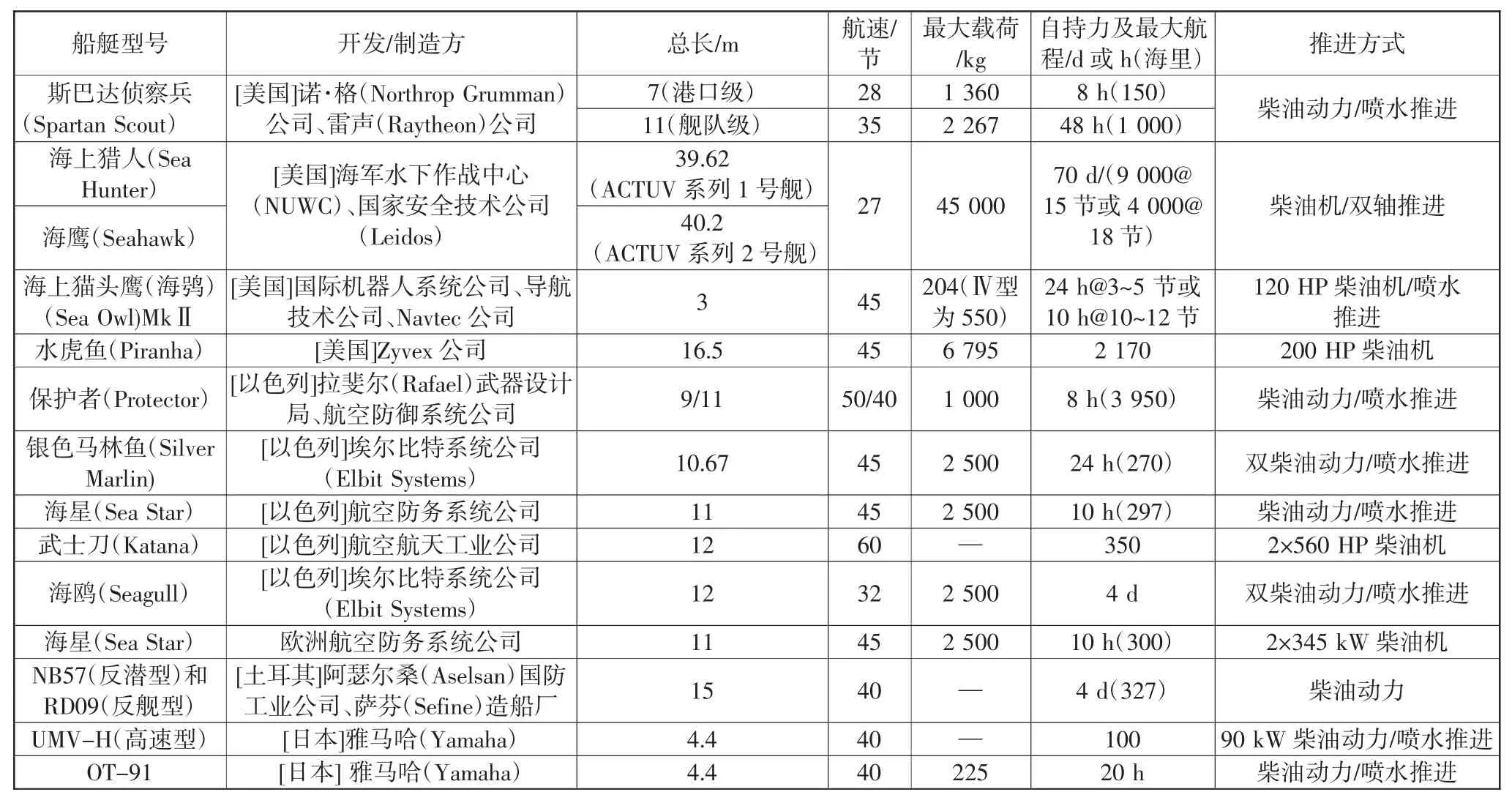
表1 世界主要现役无人水面船艇简况
国内在无人水面艇方面起步稍晚但进步较快,目前处于军品民用两翼齐飞、军民融合协同发展的良好阶段,部分技术处于世界一流水平。
我国自主无人水面船艇技术近年的发展以自主设计的全球首艘智能商船iDolphin 38 800 t“大智”号智能散货船和国产首制具有完全自主知识产权的2万标准箱级“中远海运白羊座”号集装箱船下水为标志点,以全球首艘智能型无人系统母船“珠海云”号首航为里程碑。
2018 年,位于广东珠海的亚洲首个、世界最大的无人船舶海上测试场——万山无人船海上测试场获得中国船级社授予的测试场服务供应方认可证书并启用。
我国主要无人水面艇简况如表2 所示。

表2 我国主要无人水面艇简况
2018 年12 月,工业和信息化部、交通运输部、国防科工局联合印发《智能船舶发展行动计划(2019—2021 年)》,明确了我国智能船舶的发展方向,提出了开展研究制定智能船舶规范和标准体系建设指南工作的目标和任务。
2019 年5 月,交通运输部等七部门联合发布《智能航运发展指导意见》,明确了智能航运培育和发展的总体要求、主要任务和保障措施。
包括水面无人艇在内的我国海上智能船舶开始进入高速发展阶段。
2 动力系统的主要特点
动力系统是无人水面船艇平台的基本组成部分之一,动力强劲、稳定可靠、维保便捷的动力系统是无人水面船艇遂行任务的重要保障,其重要性不言而喻。
目前实际使用中常见的动力系统主要有以内燃机为代表的传统动力及混合动力、以动力电池驱动为主的新能源动力、燃料电池动力等。
2.1 传统动力
传统动力主要指内燃机,包括燃油和燃气的柴/汽油机、燃气轮机等产品;具有燃料能量密度高、技术成熟、加速性能好,功率大、启动快,安全可靠、耐用性强、品种繁多、产能庞大等优点,是目前无人水面艇,特别是中大型、高航速无人水面艇的首选动力装置。传统动力的主要产品如表3 所示。

表3 主流无人水面艇动力系统主要参数
传统动力的主要缺点是热效率不高、振动和噪声较大,排放污染较高、精确控制难度较大、无人状态下的维修困难等。
对在国际水域行驶的传统动力无人水面船艇来说,通常除需具备相应能力以遵守国际海事组织(IMO)的“国际海上避碰规则(COLREGs)”外,还要符合IMO 的排气污染物排放公约(MARPOL 73/78)[2]的要求。IMO 的海上航行器排气污染物排放指标TierⅠ、TierⅡ与更严格的TierⅢ排放要求已分别于2000 年、2011 年和2016 年实施。
法规要求推动技术发展。包括涡轮增压、废气再循环、电喷电控、可调定时、多种燃料以及工作过程电子监控系统、热管理系统等在内的新技术都在内燃机上获得广泛应用,以便进一步改善发动机工作过程、提高燃油热效率。目前多数船用机(组)都能够符合IMO Tier I 的相应要求,部分达到TierⅡ排放水平。
2.2 新能源动力
广义上的“新能源动力”是指除去直接燃烧传统化石燃料之外的所有动力形式,包括动力电池和燃料电池等电力驱动的纯电动方式,风能以及燃油-电池、风能-太阳能-电池等组合方式的混合动力驱动类型。
纯电驱动方式通常用于体型较小、航程较短、航速不高、任务载荷不大的无人水面艇。纯电驱动常见的动力电池包括铅酸电池、锂离子电池和镍氢电池,无人水面艇常用动力电池系统如表4 所示。

表4 无人水面艇常用动力电池系统
未来可能发展应用包括钠电池、钒电池、锌空气电池以及固态电池等。
燃料电池可将燃料的化学能直接转换成电能,具有转换效率高、清洁无污染、可控性和持续性好等特性。所具备的噪声低、振动小的特点使其成为执行特殊工作的无人水面艇较为理想的动力方式。燃料电池的主要缺点是氢气密度低,需人工定期补能。燃料电池中最常见的是氢燃料电池,只需注入氢气既可获得稳定电能输出,在无人水面船艇方面已有应用。燃料电池动力的缺点是功率小、产能低、成本高,且需要定期人工补充燃料。
太阳能、风能等可再生能源作为推动力,主要用于驻留时间较长或无限航区、移动速度较慢、以监测、观察、侦听、告警提示、通信中继等任务为主的小型水面无人艇。
太阳能是分布于海洋表面的重要可再生能源,是最具发展潜力的新能源之一。太阳能的利用可分为光热转换利用和光电转换利用。其中,光热转换利用又分为利用循环吸热材料把太阳辐射能转换为热能的光热利用技术和把太阳辐射能聚焦后间接发电的光热发电技术。光电转换利用是把太阳辐射能通过光伏材料转换为电能[3]。太阳能的优点是持续可再生、分布广泛、储量大、覆盖面广;缺点是易受环境气候影响,且光热转换效率与光电转换效率都相对较低,同时部分转换材料易受海洋高盐、高湿环境的侵蚀。
风能储量巨大,是人类最早开发利用的船舶动力。采用风帆直接推进航行的优点是简单、高效,缺点是极易受风能分布、风力风向变化以及水流变化的影响,其持续性、可控性不高。目前风能的利用方式除了直接利用风力外,还有风力发电推进和风力-太阳能等组成的混合动力装置推进。风力发电是通过风叶和发电机将风能转化为电能进行推进,优点是除了可以产生行驶动力,还能够提供一定的船载设备用电。
美国加州无人航海公司(Saildrone)开发的“无人航海探索者”(Saildrone Explorer)是一种风力推进的无人水面艇,用于从海洋中自主收集高质量数据。该艇以风力为行驶动力,艇上安装太阳能板为装载的设备供电,可在海上行驶12 mon。
2.3 混合动力
混合动力的特点是将几种动力方式集中到一起,相互补充,择优利用。既可以将内燃机与动力电池组合,也可以将风能、太阳能与传统动力组合,或将风能、太阳能与波浪能进行多重组合。
混合动力系统综合了内燃机、电动机、风能、太阳能及波浪能等多种能量的优点,并抵消了单一动力的主要缺陷,能同时满足速度、功率、长运行时间、零排放、静音和减少波动等使用要求。船只在移动时可以轻松地从一种操作模式切换到另一种,且可以不产生排气污染的航行状态穿过海洋保护区,为无人水面艇提供更高可靠性、更低维护量和更好燃油经济性的动力应用选择,大幅延长了无人艇的航程和持续行驶时间,提高无人艇的燃料有效载荷率。目前多家船用动力系统供应商都提出了各自的船艇用混合动力解决方案。
美国海军为其“斯巴达侦察兵”无人艇的动力系统提出“高能量密度动力源(CIHFE)”项目,将柴油机与动力电池包组合成混合动力系统,力求为该无人水面艇提供更大的航程和自持力以及更好的燃油经济性。
日本Eco Marine Power 公司的Aquarius 浅水新概念无人艇,长5m,翼展8m,采用三体船结构,船体采用轻量级复合铝材制造,应用太阳能-电能混合动力,巡航时速最高6 节,能实现长时间自主运行,可军民两用。
猴头菌炖鸡。将鸡料理干净,去内脏,猴头菌切片和鸡共煮即可。此肴具有补益心脾、益气养血的功效,适应于神经衰弱、身体虚弱之人食用。
英国自主水面航行器公司(ASV)的C-Enduro无人水面艇,艇长4.2 m,采用风能-太阳能-柴油机混合动力,其中风力发电机功率为720 W、柴油发电机充电功率为2.5 kW,12 块太阳能电池板能够产生1.2 kW 电力;采用双直流电机驱动。最高航速7 节,最大航程300 海里,可持续自主航行3 mon,具有较好的综合动力性能,主要用于环境研究。
2.4 新兴能源动力
新兴能源动力包括:波浪能、温差能、盐差能、海洋生物能等,目前尚处于研究探索阶段。
波浪能是指波浪中包含的势能和动能。无人水面艇对波浪能的利用方式主要有波浪直接推进和波浪能发电。采用波浪能量直接推进方式的典型产品,是由水面母船和水下滑行体两部分组合在一起的、被称为“波浪滑翔机(Wave Glider)”的新型无人艇。波浪滑翔机通过舵控制航行方向、通过波浪动能与势能转换的连续作用持续前进[4]。
美国Liquid Robotics 公司在2007 年推出了一款波浪能-太阳能混合动力的波浪滑翔机,由水面母船搭载太阳能电池板提供电力,设计航速为1~3 节,可在水面长时间执行工作任务[5]。
中船集团七一〇所主导研制的“海鳐”无人艇也是波浪能-太阳能混合动力的波浪滑翔器,利用太阳能板获取机载电气设备的能源,具有卫星通信定位、自主航行控制功能,能够搭载多种海洋环境观测传感器,可应用于大范围、远距离的海面气象参数与水动力环境参数监测、水下目标探测以及作为水面水上通信节点等多重任务[6]。
波浪能发电是将波浪中的能量转换为电能,按能量转换方式可分为机械式、气动式和液压式波浪能发电,按结构可分为摆式、漂浮式和振荡式波浪能发电等。波浪能发电机可对多种海况下的波浪能量进行收集,为无人水面艇的能源动力多元化提供了新途径[7]。波浪能发电的优点是能源分布广、可再生循环,缺点是能量强、速度慢、周期性差且极不稳定。由于不同海况下晃动摆的频率不尽相同,因此其发电需要进行频率耦合。
温差能是利用海洋表面吸收太阳能形成的高温海水层与海洋深处的低温海水层之间的温度差形成的温差能。主要利用方式包括通过外油馕或相变材料吸收温差能后改变形状来提供航行动力的温差能水下滑翔机和直接利用相变材料吸收温差能推动发电机发电的温差能发电装置。
3 补能技术的发展
为适应包括无人水面艇以及无人水下潜航器等在内的无人船艇越来越趋向于多任务、大型化、大航程、长航时、高荷载、高海况条件下使用,以及减少布放和回收频次的要求,迫切需要对无人船艇进行有效的能源补充。无人水面船艇能量的补充方式和有效性已成为保障无人水面船艇任务目标达成的重要条件,各种创新性补能技术都在积极探索中。
目前,国外在无人艇补能技术方面的研究主要集中在:自主补能(无人补给站)、远距离传输和环境能量转换等领域的探索研究。
3.1 自主补能(无人补给站)技术
美国海军研究实验室(NRL)进行了从固定平台向无人水面艇进行自主加油试验“快速自主燃油传输(RAFT)”项目。通过对无人水面艇在海面运动轨迹的跟踪后,将磁性加油装置安放到无人水面艇上的加油接口处并完成燃油传输[9]。
美国巴特尔(Battelle)公司开发名为“海洋枢纽(OceanHub)”的补能技术,通过利用WiFi 接口和感应线圈对无人水下潜航器进行非接触式数据传输与充电,实现无人潜航器(UUV)的电力和数据的水下传输而无需浮出水面[10]。
美国海洋机械(Sea Machines)公司完成“海上无人自主加油站”项目,将传统驳船改造成自主平台来为旋翼机、水面有人/无人舰艇和海岸勤务站点等提供能量、物资补给。岸上操作员通过自主控制系统具有远程态势感知能力,并能实现远程指挥和控制。
3.2 远距离能量传输技术
远距离能量传输的核心是寻求以激光、微波、电磁脉冲等多种能量波的方式,实现能量的远距离传递和无接触接收,最终转换成电能来为水面、水下和空中设备提供远程能量补充。
美国国防高级研究计划局(DARPA)设立为现有的KC-135 和KC-46 空中加油机配备“翼下动力发射吊舱”,通过激光束向无人驾驶飞行器进行电力的无线传输与充电的研究项目。
美国电动天空公司研制了名为“耳语者”的“定向无线电信号发射器”[11]。通过发射的激光/微波在接收器处聚焦并转换,来为无人机提供kW 级电能以延长电动无人机飞行时间。
日本九州工业大学开展“电磁共振无线能量传输技术”研究[12],以期提高相应无人设备的续航能力。
3.3 环境能量转换技术
环境能量转换技术的技术要点是,将太阳能、风能、波浪能以及生物能等在海洋中广泛蕴藏的多种能量,通过光热转换技术、热离子转换技术、微生物发电技术等新型能量转换技术将其转化为电能[13-14]。
美国在此领域研究方向的任务提出、项目投资以及参与单位包括美国国防部国防高级研究计划局(DARPA)、空间与海上作战系统中心太平洋分部(SSC pacific)、海军研究实验室(NRL)、美国能源部、国家科学基金会以及多家企业和研究机构。
所开展的研究项目包括:可将光热直接转化为电能的小型便携式光热发电机项目、通过加热易于受热发光材料,将材料发出的光经光伏转换成电能的小型便携式热光伏发电机项目、以海底微生物作为电极的微生物燃料电池项目,以及通过水下对接入坞的方式将海面能量收集平台收集到的环境能量(太阳能、风能和波浪能等)传输给AUV 的能量转换技术等[14]。
海洋蕴藏着多种取之不竭的能量,通过开展各种能量转换与补能技术研究,对无人水面船艇的整体发展具有及其重要的意义。
4 结论
1)动力系统是水面无人船艇的重要组成部分,水面船艇的目标任务、工作环境、船艇大小及动力性能等是选择动力系统类型的基本要素;选用高效推进器系统与改进动力系统热管理技术水平是提高无人水面船艇综合动力性能的重要手段。
2)水面无人船艇,特别是高速、多任务、中大型无人水面艇当前的首选动力仍将是内燃机为首的传统动力;传统动力用于水面无人艇需要解决的主要问题是功率密度与燃料经济性问题、振动与噪声问题、红外特征问题、排气污染物排放问题以及故障维修问题。
3)动力电池组驱动系统是水面无人船艇大规模发展应用的重要基础;动力电池急需解决的是动力电池的能量密度与安全性;新兴能源动力基于自身特性,未来既有很大的发展空间同时也受限于有限的应用领域。
4)混合动力与燃料电池是对传统动力与动力电池驱动的完美替代,其良好的综合性能将会成为未来水面无人船艇动力的重要发展方向。
5)能量补充技术是制约未来各类无人航行器发展的瓶颈;相对于无人航空器,无人水面船艇所处的海洋环境为能量补充提供了更多的可能;高效可靠的补能技术是未来无人水面艇大规模发展应用的重要保障。
6)军民融合发展是未来无人水面船艇动力与补能技术快速发展和大规模应用的技术基础和经济保障。
猜你喜欢
广东造船(2023年1期)2023-06-30 16:47:30
学苑创造·A版(2022年4期)2022-06-18 11:22:44
广东造船(2022年1期)2022-04-09 08:45:22
无人系统技术(2022年1期)2022-03-24 01:22:58
课外生活(小学1-3年级)(2020年2期)2020-03-09 03:24:26
当代陕西(2020年24期)2020-02-01 07:06:46
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
摄影之友(影像视觉)(2017年8期)2017-11-27 02:08:34
能源(2016年3期)2016-12-01 05:11:02
滇池(2014年5期)2014-05-29 07:30:25
